全球精密單點定位性能評估
2024-01-30 09:16:14王林偉周長江余海鋒岳彩亞
導(dǎo)航定位與授時 2023年6期
王林偉,周長江,余海鋒,岳彩亞
(1.中水北方勘測設(shè)計研究有限責(zé)任公司,天津 300222;2.聊城大學(xué)地理與環(huán)境學(xué)院,山東 聊城 252000)
0 引言
隨著北斗三號全球衛(wèi)星導(dǎo)航系統(tǒng)(BeiDou-3 navigation satellite system,BDS-3)的建成與開通,中國衛(wèi)星導(dǎo)航系統(tǒng)已正式邁入全球服務(wù)新時代,實現(xiàn)全方位、多層次、高精度應(yīng)用已成為當(dāng)前和未來北斗衛(wèi)星導(dǎo)航系統(tǒng)的重要任務(wù)[1]。新組網(wǎng)完成的BDS-3衛(wèi)星在信號體制上,除了繼續(xù)播發(fā)北斗二號衛(wèi)星導(dǎo)航系統(tǒng)(BeiDou-2 navigation satellite system,BDS-2)的B1和B3信號外,還增加了兩個兼容互操作性能更強(qiáng)的信號B1C和B2a,其頻率分別與美國全球定位系統(tǒng)(global positioning system,GPS)和歐洲伽利略衛(wèi)星導(dǎo)航定位系統(tǒng)(Galileo)相同,極大地增強(qiáng)了各衛(wèi)星系統(tǒng)的兼容與互操作能力[2]。
精密單點定位(precise point positioning,PPP)是指利用高精度的衛(wèi)星星歷數(shù)據(jù),在綜合考慮各項誤差改正的基礎(chǔ)上,利用載波相位和偽距觀測值實現(xiàn)單臺接收機(jī)定位的一項新技術(shù)[3]。基于GPS、格洛納斯衛(wèi)星系統(tǒng)(global navigation satellite system,GLONASS)、Galileo和BDS-2的PPP技術(shù)已得到快速發(fā)展和多層次應(yīng)用,主要體現(xiàn)在PPP技術(shù)已由初始浮點解狀態(tài)轉(zhuǎn)變成固定解狀態(tài)[4-5],單系統(tǒng)雙頻定位轉(zhuǎn)向多頻多系統(tǒng)融合定位[6-7]。對于新建立的BDS-3,其在PPP方面的研究當(dāng)前主要集中在模型偏差的構(gòu)建、與其他系統(tǒng)融合的定位性能分析以及新頻點數(shù)據(jù)的可用性評估等方面,如潘林等[8]基于實時改正數(shù)信息,利用北斗監(jiān)測站廣播星歷和觀測數(shù)據(jù),分別進(jìn)行了雙頻靜態(tài)、雙頻仿動態(tài)、單頻靜態(tài)和單頻仿動態(tài)仿實時精密單點定位,并評估其性能;劉永正等[9]基于全球分布的連續(xù)觀測站解算了BDS-3衛(wèi)星FCB產(chǎn)品并實現(xiàn)了模糊度固定,結(jié)果表明模糊度固定后靜態(tài)解在東、北和天3個方向的均方根誤差可達(dá)0.94 cm,0.73 cm 和1.39 cm;李浩東等[10]在顧及BDS-3與其他GNSS頻間偏差的基礎(chǔ)上開展了多頻非組合PPP變形監(jiān)測研究,結(jié)果表明監(jiān)測精度可分別提升12%,13%和14%;宋偉偉等[11]和王樂等[12]基于PPP模型分別對BDS-3新頻點信號服務(wù)性能進(jìn)行了評估,結(jié)果表明其在定位精度和收斂時間方面相對于舊頻點信號均具有一定的改善。盡管關(guān)于BDS-3方面的PPP已存在大量研究,然而多層面系統(tǒng)性地評估其在全球范圍內(nèi)精密單點定位性能的研究較少,特別是在當(dāng)前國際GNSS服務(wù)組織(International GNSS Service,IGS)分析中心已基本具備發(fā)布全部BDS-3衛(wèi)星精密星歷數(shù)據(jù)的背景下(ftp://ftp.gfz-potsdam.de/),利用真實觀測數(shù)據(jù)客觀評估其在全球范圍內(nèi)精密單點定位性能顯得迫切需要。
本文利用全球均勻分布的10個可接收BDS-3觀測數(shù)據(jù)的MGEX 跟蹤站,分別從24 h內(nèi)接收到的衛(wèi)星數(shù)、衛(wèi)星位置精度因子(position dilution of precision,PDOP)、衛(wèi)星數(shù)據(jù)可用率和雙頻非組合PPP靜態(tài)/動態(tài)定位性能全面系統(tǒng)性地評估了BDS-3在全球范圍內(nèi)精密單點定位性能。
1 雙頻非組合PPP方程
在充分考慮各種測量誤差的情況下,原始雙頻偽距和載波相位觀測方程可表示為[13]
式中:C 表示BDS-3系統(tǒng),s為導(dǎo)航衛(wèi)星的PRN 號(pseudo-random noise),r為接收機(jī),j=1,2為觀測值頻率;為偽距觀測值,為載波觀測值表示站星幾何距離;和分別為接收機(jī)鐘差和衛(wèi)星鐘差;為與頻率相關(guān)的電離層延遲放大因子;為基于頻率上的傾斜電離層延遲;和分別為濕投影函數(shù)和接收機(jī)處天頂濕延遲;為頻率對應(yīng)的波長,為頻率上的整周模糊度;和分別表示接收機(jī)端和衛(wèi)星端相位硬件延遲偏差;和分別表示與頻率相關(guān)的接收機(jī)端和衛(wèi)星端碼硬件延遲偏差;和分別為偽距和載波上的觀測噪聲、多路徑效應(yīng)以及其他未模型化的誤差之和。
假設(shè)衛(wèi)星端天線相位中心偏差已通過天線文件信息改正,相位纏繞誤差已通過附加天線外部姿態(tài)信息改正,對流層干延遲誤差已通過Saastamoninen模型改正,以及相對論效應(yīng)已通過引力延遲偏差模型和軌道偏心率周期性偏差模型改正[2]。鑒于苗維凱等[14]詳細(xì)地給出了多頻非組合PPP 推導(dǎo)過程,本文直接給出適用于BDS-3的雙頻非組合PPP偽距和相位觀測方程實用公式
因此,在BDS-3雙頻非組合PPP 中,待估參數(shù)A包括初始坐標(biāo)改正矢量x、接收機(jī)鐘差、對流層濕延遲、傾斜電離層延遲和浮點模糊度等五種類型參數(shù),如式(3)所示,PPP詳細(xì)解算策略如表1所示。

表1 PPP數(shù)據(jù)處理策略Tab.1 PPP data processing strategies
2 BDS-3全球定位性能分析
為了詳細(xì)分析BDS-3在全球范圍內(nèi)精密單點定位性能,本文從MEGX 官網(wǎng)上下載得到了全球均勻分布的10個連續(xù)跟蹤站(如圖1所示)。所有測站均可最大限度地接收到BDS-3衛(wèi)星,數(shù)據(jù)采樣時間為30 s,年積日為2023年038~040天。由于當(dāng)前德國地學(xué)研究中心(Geo Forschungs Zentrum,GFZ)發(fā)布的精密星歷產(chǎn)品中BDS-3衛(wèi)星已更新到PRN60,是當(dāng)前精密星歷數(shù)據(jù)中BDS-3衛(wèi)星數(shù)最多的產(chǎn)品,因此,本研究中擬采用的衛(wèi)星軌道和鐘差為該分析中心發(fā)布的事后精密產(chǎn)品,衛(wèi)星PCO/PCV 采用IGS發(fā)布的產(chǎn)品進(jìn)行改正[3]。評估過程中,分別從衛(wèi)星接收數(shù)、衛(wèi)星定位PDOP、BDS-3衛(wèi)星數(shù)據(jù)可用率和雙頻非組合PPP 浮點解定位性能四個方面進(jìn)行分析研究。
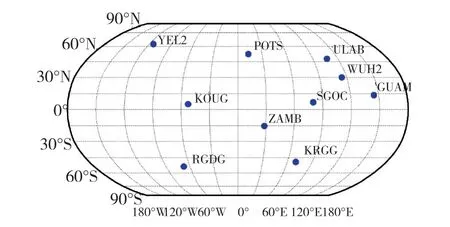
圖1 BDS-3 MGEX跟蹤站分布(https://igs.org/)Fig.1 Distribution of the BDS-3 MGEX tracking stations(https://igs.org/)
2.1 衛(wèi)星可見數(shù)和PDOP值分析
衛(wèi)星精密定位中,充足的衛(wèi)星數(shù)量可增強(qiáng)定位精度和提升解算可靠性,而定位PDOP值是衡量衛(wèi)星導(dǎo)航系統(tǒng)定位精確程度的另一重要指標(biāo)。為了分析全球范圍內(nèi)BDS-3衛(wèi)星系統(tǒng)的定位性能,本文解算了全球均勻分布的10個MGEX跟蹤站,并提取相應(yīng)測站的衛(wèi)星接收數(shù)和PDOP值(如圖2所示)。
圖2 中展示了GUAM,POTS,SGOC,YEL2,RGDG和KRGG六個測站年積日(day of year,DOY)038天的24 h衛(wèi)星數(shù)量和PDOP值。表2中給出了3天10個測站24 h內(nèi)的平均衛(wèi)星可接收數(shù)和PDOP值。統(tǒng)計時以3倍的中誤差為閾值剔除解算較差的歷元。整體分析可知,BDS-3衛(wèi)星接收數(shù)量和接收機(jī)類型具有強(qiáng)相關(guān)性,其中美國生產(chǎn)的JAVAD TRE_3型接收機(jī)和比利時生產(chǎn)的SEPT POLARX5型接收機(jī)可最大程度地接收BDS-3 衛(wèi)星,平均分別約為11.06顆和11.14顆衛(wèi)星,而美國生產(chǎn)的TRIMBLE ALLOY接收機(jī)對衛(wèi)星跟蹤能力相對較弱,平均約為7.66顆。此外,同樣配備有SEPT POLARX5型接收機(jī)的KOUG 和YEL2測站跟蹤到的衛(wèi)星數(shù)量相對較少,主要原因是這兩個站位于美洲地區(qū)(經(jīng)度:210°~330°,緯度:-70°~60°),空中可視BDS-3衛(wèi)星數(shù)較少,與BDS-3 衛(wèi)星系統(tǒng)全球覆蓋率有關(guān)系[15]。實際上,無論采用哪種接收機(jī)類型,均可滿足全球范圍內(nèi)單點定位,并且在大部分時間內(nèi)可滿足PPP需求。

表2 2023年038~040天不同測站BDS-3平均衛(wèi)星數(shù)、PDOP和接收機(jī)類型Tab.2 Average number of satellites,PDOP and receiver types of BDS-3 of DOY 038~040 in 2023
對于PDOP值,其表現(xiàn)出的規(guī)律和衛(wèi)星數(shù)呈負(fù)相關(guān)關(guān)系,即當(dāng)衛(wèi)星可用數(shù)多時,PDOP值呈現(xiàn)出低值特征,但表明衛(wèi)星定位具有較高的精確程度。經(jīng)統(tǒng)計表明,在去除美洲地區(qū)測站后,SEPT POLARX5,JAVAD TRE_3和TRIMBLE ALLOY三種類型接收機(jī)24 h內(nèi)的平均PDOP值分別為1.57,1.69和2.24。無論是衛(wèi)星接收數(shù),還是PDOP值均表明TRIMBLE ALLOY接收機(jī)性能相對較低。因此,在進(jìn)行BDS-3衛(wèi)星定軌、定位或其他應(yīng)用時應(yīng)重點選擇另外兩種接收機(jī),并對美洲地區(qū)的測站進(jìn)行更為嚴(yán)格的質(zhì)量控制。值得說明的是,本文在統(tǒng)計PDOP值和衛(wèi)星數(shù)時之所以將衛(wèi)星高度角閾值設(shè)置為7°,是因為PPP解算時也是將衛(wèi)星高度角閾值設(shè)置為7°。
2.2 BDS-3 PPP定位性能和數(shù)據(jù)完整率分析
為了有效分析BDS-3全球精密單點定位性能,本文對上述10個測站三天數(shù)據(jù)分別實施了24 h靜態(tài)和動態(tài)雙頻非組合PPP解算。為了便于對比,同時實施了BDS-2和BDS-3融合PPP解算。分析過程中,以IGS發(fā)布的SNX文件中的各測站坐標(biāo)作為真值,表3中統(tǒng)計了10個連續(xù)跟蹤站三天解的平均定位殘差,統(tǒng)計時對各測站最后30 min的定位解殘差進(jìn)行平均。在此說明的是,為了保證PPP定位精度,本文將傾斜地球同步軌道衛(wèi)星、地球中圓軌道衛(wèi)星和地球靜止軌道衛(wèi)星權(quán)重設(shè)置為4∶4∶1[16]。
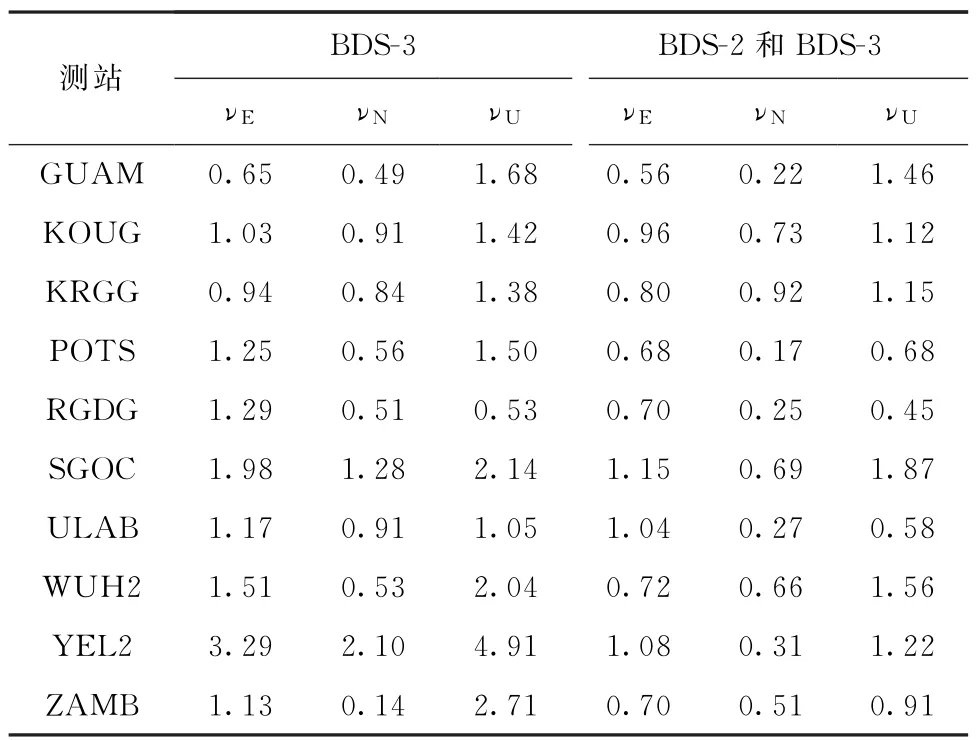
表3 非組合PPP東方向(E),北方向(N)和高程方向(U)靜態(tài)定位殘差Tab.3 Static uncombined PPP east(E),north(N)and elevation direction(U)positioning residuals cm
對于靜態(tài)解(如表3所示),總體分析可知,除了YEL2測站外,其余測站均可滿足水平方向定位精度優(yōu)于2 cm,高程方向優(yōu)于3 cm,并且在加入BDS-2后可進(jìn)一步提升測站三維位置精度。對除YEL2測站外所有測站定位殘差取平均分析,單BDS-3在東方向、北方向和高程方向定位殘差νE,νN和νU分別為1.42 cm,0.83 cm 和1.84 cm,加入BDS-2系統(tǒng)后,三個方向定位殘差分別為0.84 cm,0.47 cm和1.10 cm,分別提高約37.6%、25.3%和38.9%。對YEL2測站進(jìn)行質(zhì)量分析發(fā)現(xiàn),該測站觀測數(shù)據(jù)中缺少頻點觀測值和驗前、驗后殘差大于閾值的衛(wèi)星較多,進(jìn)而導(dǎo)致在定位過程中剔除過多的衛(wèi)星,盡管從衛(wèi)星數(shù)量和衛(wèi)星PDOP 值上仍可滿足解算要求,但其空間定位幾何構(gòu)型強(qiáng)度有一定程度減弱。
對于動態(tài)解(如表4所示),測站坐標(biāo)參數(shù)被當(dāng)成白噪聲進(jìn)行逐歷元估計,可較好地反映所建立的PPP模型的性能。圖3 中以GUAM 測站為例展示了BDS-3,DS-2和BDS-3單天動態(tài)解殘差時間序列。對10個測站進(jìn)行均方根(root mean square,RMS)統(tǒng)計分析可知,單BDS-3系統(tǒng)在東方向、北方向和高程方向定位殘差RMS 分別為2.62 cm,1.63 cm 和3.27 cm,BDS-2 和BDS-3 融合的三個方向定位殘差分別為1.95 cm,1.17 cm 和2.24 cm。通過靜態(tài)和動態(tài)非組合PPP解可知,單BDS-3衛(wèi)星系統(tǒng)可滿足全球范圍內(nèi)精密單點定位需求,且具有較高的解算精度,但在聯(lián)合使用BDS-2和BDS-3進(jìn)行融合定位的條件下,可進(jìn)一步提升測站定位性能和可靠性。值得說明的是,本文在精度統(tǒng)計時剔除了收斂時間段內(nèi)數(shù)據(jù),并以3倍中誤差為閾值進(jìn)行全時段異常值探測和剔除。
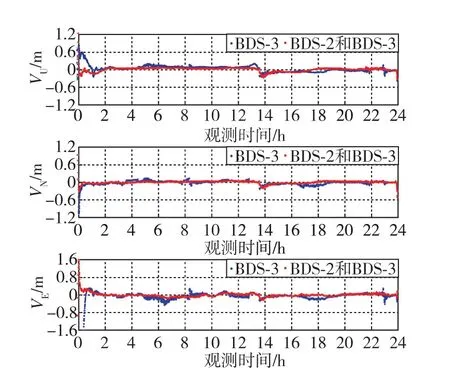
圖3 年積日038天的GUAM 測站三維方向24 h動態(tài)定位殘差Fig.3 24-hour dynamic residual in the three directions of the GUAM station in DOY 038

表4 非組合PPP在E,N 和U 方向動態(tài)定位殘差RMSTab.4 Positioning residual RMS of kinematic uncombined PPP in E,N and U direction cm
為了進(jìn)一步分析BDS-3全球定位性能,本文統(tǒng)計了各測站的數(shù)據(jù)解算完整率(如圖4所示),其計算方法為24 h靜態(tài)PPP解算歷元總數(shù)與總歷元數(shù)的比值,該項指標(biāo)可有效反映BDS-3衛(wèi)星數(shù)據(jù)連續(xù)定位能力。統(tǒng)計表明,KRGG 測站和RGDG 測站數(shù)據(jù)解算完整率分別為96.6%和99.2%,其余測站解算完整率均接近100%,表明單BDS-3衛(wèi)星在全球范圍內(nèi)具有較強(qiáng)的連續(xù)定位能力和極高的可用性。其中KRGG 和RGDG 站解算完整率低的原因是這兩個測站采用的是TRIMBLE ALLOY 接收機(jī),接收到的BDS-3衛(wèi)星相對較少,且在定位解算過程中剔除了具有單頻點觀測值、小高度角和地球陰影等衛(wèi)星,導(dǎo)致在某些歷元無法實現(xiàn)解算,如圖2中的KRGG 站,其在14時至16時期間,某個歷元衛(wèi)星數(shù)量為5顆,衛(wèi)星PDOP已經(jīng)超過閾值10,必須加以剔除。通過表3可知,盡管這兩個測站數(shù)據(jù)解算完整率低,但其仍然可以達(dá)到較高的定位精度,主要原因是在剔除了某些異常歷元后,解算結(jié)果在靜態(tài)濾波過程中并未受到顯著影響,仍保持較強(qiáng)的穩(wěn)定性。

圖4 各測站數(shù)據(jù)解算完整率Fig.4 The completeness rate of the data solution for each test station
3 結(jié)論
本文以全球均勻分布的10個MGEX 跟蹤站評估了BDS-3衛(wèi)星系統(tǒng)的全球可用性,并與BDS-2和BDS-3融合系統(tǒng)定位性能進(jìn)行對比。結(jié)果表明:
1)測站跟蹤到的衛(wèi)星數(shù)和定位PDOP 與接收機(jī)類型和區(qū)域特征具有較強(qiáng)的相關(guān)性,但均可較好地滿足全球精密單點定位需求。
2)通過靜態(tài)和動態(tài)非組合PPP 解可知,單BDS-3衛(wèi)星系統(tǒng)在全球范圍內(nèi)具有較高的定位精度,水平方向優(yōu)于2 cm,高程方向優(yōu)于3 cm,并且在聯(lián)合使用BDS-2和BDS-3定位的條件下,可進(jìn)一步提升測站定位性能和可靠性。
3)通過計算各測站的數(shù)據(jù)解算完整率發(fā)現(xiàn),BDS-3衛(wèi)星在全球范圍內(nèi)具有較強(qiáng)的連續(xù)定位能力,當(dāng)使用SEPT POLARX5和JAVAD TRE_3接收機(jī)的情況下,數(shù)據(jù)解算完整率可達(dá)100%。
