DDPG方法在抖振約束下變彎度翼型/機翼設計的應 用 研 究
2024-01-29 08:32:38周思歷
應用數學和力學 2024年1期
周思歷, 孫 剛, 王 聰
(復旦大學 航空航天系, 上海 200433)
0 引 言
降低巡航阻力、提高巡航升阻比一直以來都是民用客機設計的重要指標[1].傳統翼型常以50%燃油載荷對應的升力系數為設計點進行設計[2-3].但在其他燃油載荷下,翼型的升阻性能往往會下降明顯.相比于繼續優化設計點獲得更好的50%燃油載荷附近的巡航性能,同步優化其他燃油載荷下的非設計點無疑更能提升整段巡航的平均升阻性能,進而提升巡航的質量和經濟性[1].
變彎度技術是近年來發展較快的一種減阻方式.通過后緣襟翼的偏轉實現翼型彎度的改變,在不同升力系數工況下獲得更低的巡航阻力[4].如Kaul等[3]研究了5種不同的變彎度構型與基礎翼型在-3°到10°迎角范圍下的升阻性能差異,其中4種構型都表現出了優于基礎翼型的性能.郭同彪等[5]以設計點單點優化了兩種跨聲速翼型,再結合變彎度技術改善了非設計點的升阻性能.而變彎度技術還可與基礎翼型的優化耦合,在基礎翼型設計階段納入變彎度技術,通過基礎翼型的外形優化和彎度搭配,同步提升了多升力系數工況的升阻性能.Niu等[4]以基礎翼型不同彎度下的最大升阻比作為評價指標來優化翼型基礎外形,設計出各工況下通過彎度變化均可獲得較大升阻比的變彎度翼型.
而在民用客機設計中,比經濟性要求更嚴格的是安全性.超臨界翼型設計的一個重要方面就是翼型的抖振特性.隨著飛行Mach數和迎角的增長,翼型上表面會產生激波誘導分離區域,激波與分離區相互作用,導致大范圍的激波自持振蕩,造成阻力激增與升力損失,甚至對翼面結構造成影響和破壞,嚴重時還會引發飛機安全事故[6-7].故在飛機設計階段就必須納入抖振特性的考慮,飛機巡航升阻性能的提升不能以抖振特性的減弱為代價.民用客機巡航也要求留有1.3g的抖振裕度,即在1.3g過載下仍具備正常飛行能力,不出現上述抖振現象[8].
但精確抖振模擬的計算代價太大,直接代入優化流程會導致難以接受的計算成本[9].故尋常優化設計中常以氣動參數曲線線性段偏移等方法[10-11]對抖振始發邊界進行判斷,但這也需計算出完整的氣動參數隨迎角變化的曲線,成倍增加優化流程的計算量.故本文參考文獻[8],發展了一種描述翼型上表面流動分離的光滑連續函數,基于抖振與流動分離的伴隨關系,通過對分離函數的限制,實現了抖振性能的約束.
而抖振約束下的變彎度翼型多升力系數工況優化較為復雜,尋常基于梯度的優化算法難以適用.而隨機方法如粒子群(PSO)、遺傳等群智能算法在設計空間內“撒點式”的尋優雖然常能找到合適的設計結果,但基于概率來選擇進化方向又導致了計算代價大、收斂速度慢、可能陷入局部最優等缺點,在設計場景復雜、需要反復迭代的變彎度翼型優化中,并不是合適的選擇.深度強化學習是近年來興起的熱點,在圖像處理[12-13]、自動駕駛[14-15]等領域已經取得了較多研究成果,在翼型氣動優化設計方面也有了一定的研究基礎[16-17].不同于群智能算法“撒點式”逐漸收縮至最優值附近的方式,深度強化學習是一類基于策略學習的機器算法,它通過與環境的不斷交互積累經驗,從經驗中逐漸學會回報最高的策略.而深度確定性策略梯度(DDPG)方法作為深度強化學習的經典算法,具有以神經網絡精確近似值函數、以經驗緩沖離散樣本相關性、以目標網絡與現實網絡相結合提升訓練穩定性等特點,在高維連續動作任務中表現出了良好的性能,在氣動設計領域得到了一定程度的應用.如Yan等[18]以升阻力系數為目標提出了一種基于DDPG的導彈氣動外形優化方法,成功地設計出性能良好的導彈外形.Qin等[19]以總壓損失系數、吸力面相對層流面積等構建DDPG回報函數,實現了對壓氣機葉柵葉型的迭代修型,設計出降低3.59%總壓損失系數、提高25.4%吸力面相對層流面積的良好葉柵葉型.
本文將DDPG方法應用于抖振約束下的變彎度翼型設計.首先,基于CFD數值計算樣本庫搭建了人工神經網絡(ANN)代理模型,再結合變彎度技術構建變彎度翼型優化模型,添加幾何外形約束和分離函數約束,并以DDPG方法對此模型進行修型優化,利用模型給出的氣動參數反饋,學習修型經驗,完善修型策略,實現了翼型優化設計.然后,與PSO和改進灰狼(GWO)兩種群智能算法對此模型的優化結果進行比較,驗證了本文DDPG方法的良好性能.最后,以此變彎度模型和DDPG方法實現了某機翼截面翼型的變彎度優化,并生成錐形后掠翼驗證翼型變彎度優化對三維機翼的貢獻.本文主要內容如下:第1節介紹了設計流程中的多種方法,包括變彎度技術、分離函數方法、DDPG方法;第2節介紹了具體設計過程,包括優化模型、優化過程、結果分析;第3節對本文工作進行了總結.
1 設 計 方 法
1.1 框架總述
針對巡航階段翼型調整后緣偏轉角度來改變彎度進而改變巡航升阻比的特點,本文搭建了基于DDPG方法的變彎度翼型設計框架,實現了翼型幾何外形設計和不同升力系數工況下的彎度選擇,并與兩種群智能算法的設計結果進行比較.
本文選擇類函數/形函數變換(CST)作為翼型幾何外形參數化方法,通過Latin超立方擾動生成設計空間內的幾何外形樣本庫,加上彎度和迎角形成代理模型的輸入,通過CFD計算得到對應性能參數作為輸出,訓練ANN得到(幾何參數+彎度+迎角)-性能參數的代理模型,進而建立變彎度翼型優化模型,實現輸入翼型CST參數,輸出不同彎度下的最大升阻比曲線和其平均值.再搭建DDPG算法框架與此模型交互,學習翼型修型策略,并與群智能算法對此模型的優化結果進行比較,驗證了DDPG方法的良好性能.
基于DDPG方法和群智能算法的變彎度翼型優化設計框架如圖1所示.框架由三個模塊組成:群智能算法種群池、變彎度翼型優化模型、DDPG智能體.其中優化模型作為適應度函數對群智能算法種群池個體的評價可以實現群智能算法的種群尋優;優化模型作為環境供智能體交互學習,可以實現DDPG方法修型策略的完善.群智能算法以翼型CST參數作為個體,以優化模型計算個體適應度值,實現種群尋優與更新,循環迭代得到適應度值最優的個體.DDPG算法智能體接收CST參數作為狀態,輸出CST參數變化量作為動作,通過環境的反饋學習修型策略,實現最優翼型設計.最后經CFD驗證,比較DDPG方法與群智能算法的設計結果,驗證DDPG方法在翼型氣動設計領域的良好性能,同時得到最優翼型設計結果.
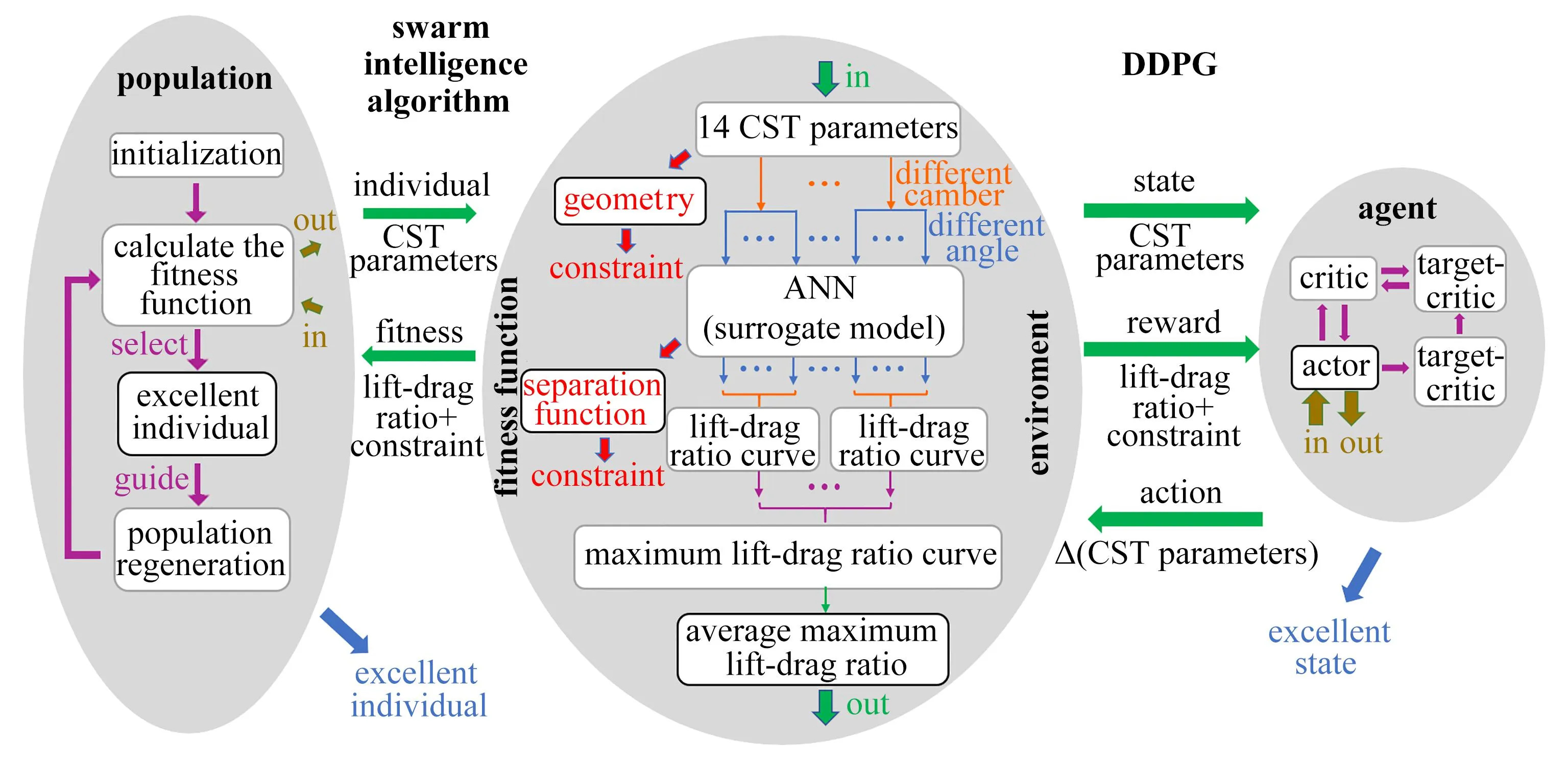
圖1 變彎度翼型優化設計框架
1.2 變彎度技術
NASA于2010年提出后緣連續可變彎度襟翼(VCCTEF)概念[20-21],文獻[3,20,22]對二維多段式襟翼截面不同偏轉方式進行了詳細數值研究,研究表明圓形變形的三段式襟翼在多升力系數點下具有優良的升阻性能.圓形變形方式指三段襟翼依次偏轉相同角度,如VCCTEF222表示三段襟翼依次偏轉2°,2°,2°.考慮到未來材料的發展,后緣連續偏轉的襟翼還被設定為襟翼各段間柔性材料連接,偏轉無縫隙、凸起等.故設定超臨界翼型變彎度方式為:以弦長70%~<80%,80%~<90%,90%以后為三段襟翼,每段襟翼繞該段前端厚度中點旋轉,旋轉后的襟翼與翼型其余部分光滑連接,三段襟翼整體以圓形變形方式偏轉.
若直接以三個變量分別控制三段襟翼的偏轉角度,則一方面對應于優化中額外添加了三個變量,增加了優化難度;另一方面優化所需數據庫的樣本規模將依托于這三個變量的劃分密度成百倍增長,如每個變量離散為6個值,計算量就是6×6×6的倍數增長,是設計中難以接受的.而一個變量控制的圓形變形方式,則顯著降低了需求樣本的數量,即在基礎翼型計算量上僅僅擴大6倍,是可以接受的計算成本.此外,圓形變形方式還能帶來更好的升阻性能提升,并有效避免了文獻[3,20,22]中存在的如S形等低效的變形方式.故本文以圓形變形方式來實現變彎度的設計.
同一超臨界翼型在不同后緣彎度下具有不同的升阻性能,如圖2所示,通過在不同升力系數工況下改變后緣襟翼偏轉角度可以獲得各工況下最大的巡航升阻比,進而獲得巡航最大升阻比曲線,以此優化翼型基礎外形,實現設計點與非設計點性能的多重提升.
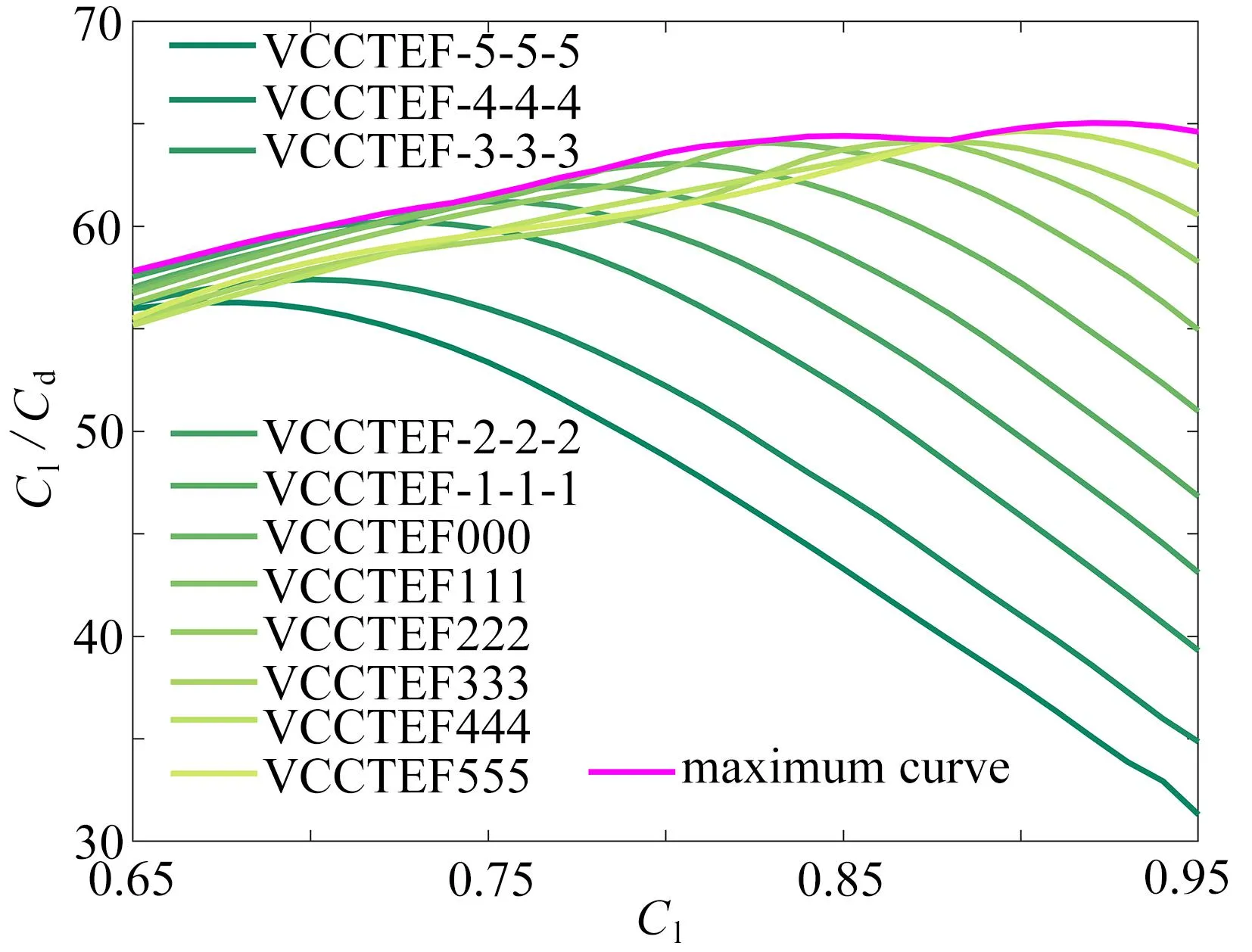
圖2 超臨界翼型不同后緣偏轉角度的升阻比曲線
1.3 分離函數方法
在抖振邊界附近,隨著飛行Mach數、迎角(或升力系數)的增大,機翼上表面流動分離區連續迅速增大,升力損失增加[8].而流動分離區增加到一定大小時,其造成的升力損失接近于Mach數增加或迎角增加帶來的升力增長,升力系數曲線的增長就變得平緩了,抖振就伴隨發生了.于是可用上表面流動分離區的大小作為二維翼型抖振發生的判據,如下式所示:
(1)
(2)
式中,V為實際流動速度,V∞為自由來流速度,Lref為上翼面參考面積(長度),k為銳度常數,dL為上翼面流場近壁面基本單元.在本文設計中,分離區大小即分離函數值Ssep=0.04時對應為抖振邊界,與文獻[8]一致.下文將與Δα=0.1方法[10]比較,驗證本文分離函數方法的可靠性.
Δα=0.1方法將翼型氣動參數(常為升力系數)曲線線性段所在直線沿迎角α增大方向線性偏移0.1后,與原曲線的交點作為抖振邊界.如圖3所示,為RAE2822翼型采用Δα=0.1方法在不同Mach數下對于抖振邊界的判定結果,為了不同Mach數下升力系數曲線的可視化,將升力系數曲線按Mach數不同在α方向上進行了一定程度的偏移.圖4為分離函數方法判定的結果,圖5為兩種方法判斷的差距.Δα=0.1方法在較大Mach數時判定結果會偏小,與文獻[8]中的情形是一致的.故本文發展的分離函數方法是可靠的.
1.4 DDPG方法
DDPG是典型的深度強化學習方法[23],能夠解決高維連續動作空間的策略學習問題.本文將其改善并應用于變彎度翼型設計,算法框架如圖6所示,算法流程如算法1所示.
DDPG智能體由兩層actor-critic網絡構成,分別是actor(網絡參數為θμ)、critic(θQ)和target-actor(θμ′)、target-critic(θQ′),actor類網格根據所處狀態給出動作,critic類網格根據狀態-動作對給出價值估計.算法收集actor與環境互動的經驗(st,at,rt,st+1)存入經驗池R.經驗池達到一定規模后,從中隨機選取小批次M條經驗數據,以target-actor基于下一狀態st+1預測下一動作at+1,target-critic預測對應價值估計Q′,結合當前回報r和遠期價值衰減系數γ形成critic當前的價值期望yi=ri+γQ′,通過梯度下降算法最小化critic當前價值估計Q與期望yi的差距更新critic網絡參數θQ,如算法1第14步所示.再通過梯度上升算法最大化critic價值估計Q更新actor網絡參數θμ,實現actor對于良好策略的學習,如算法1第15步所示.最后以actor、critic網絡參數對target-actor、target-critic網絡參數進行軟更新,如算法1第16步所示,實現所有網絡的訓練.
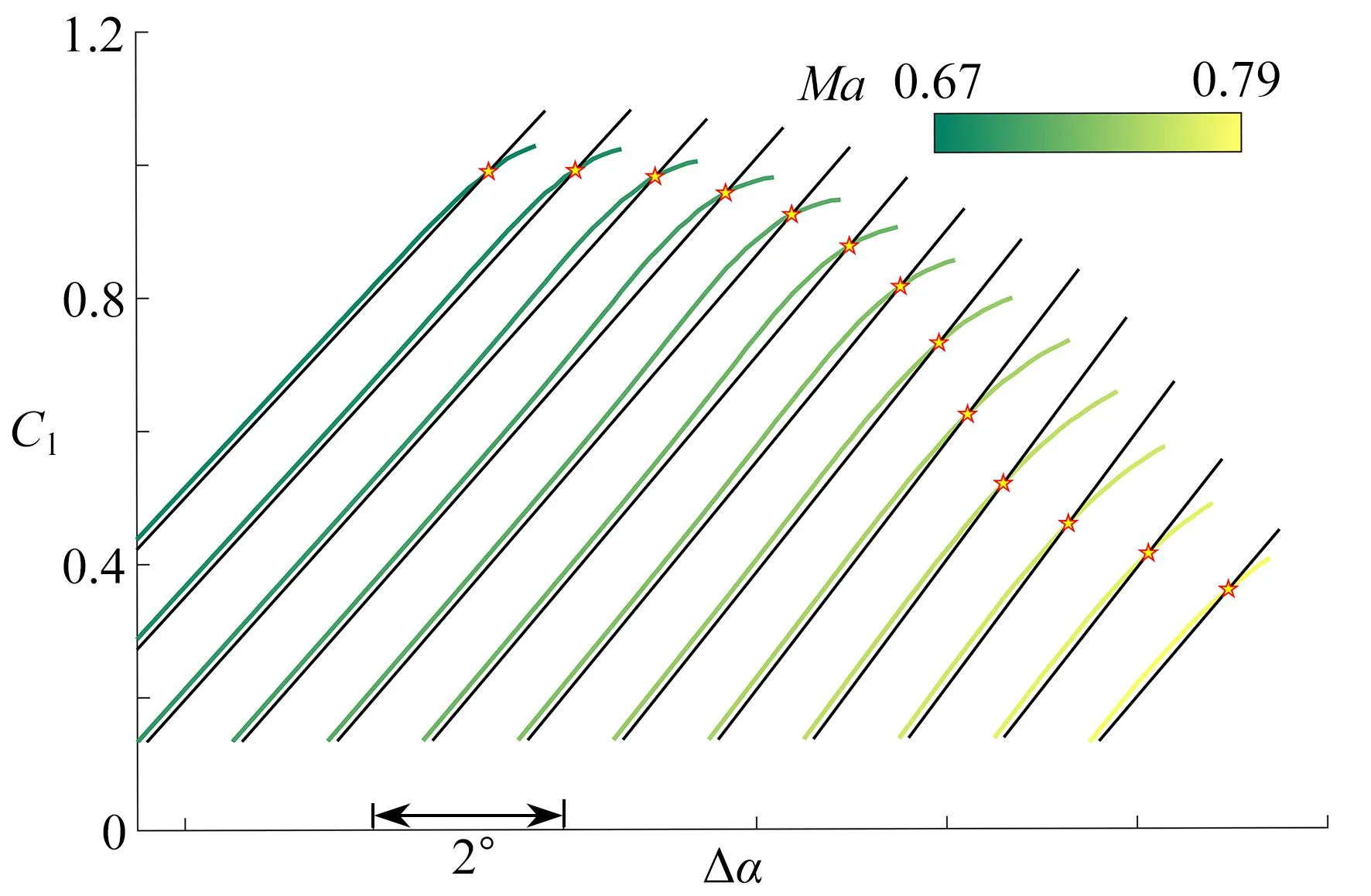
圖3 Δα=0.1方法在不同Mach數下的抖振邊界判定
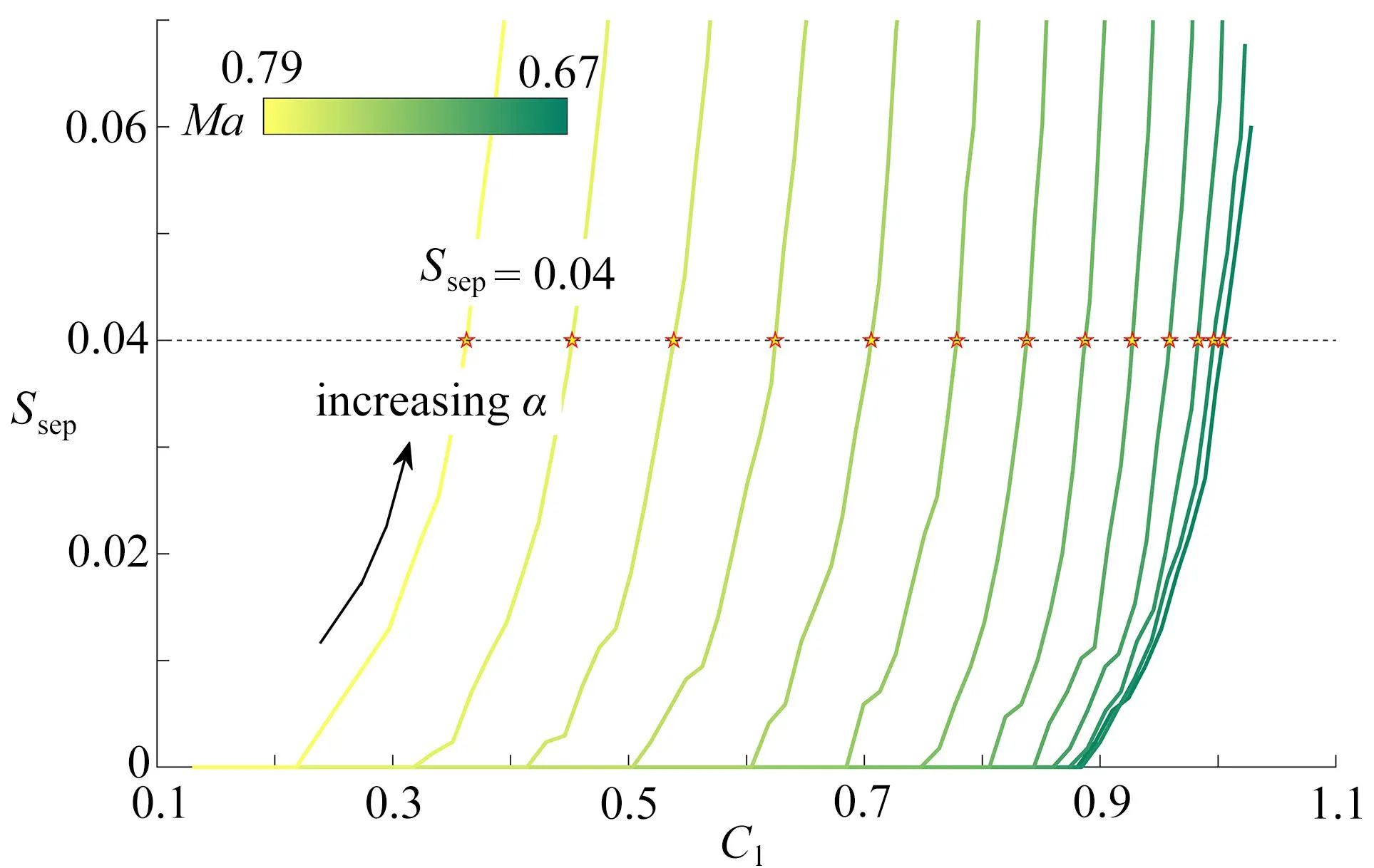
圖4 分離函數方法在不同Mach數下的抖振邊界判定
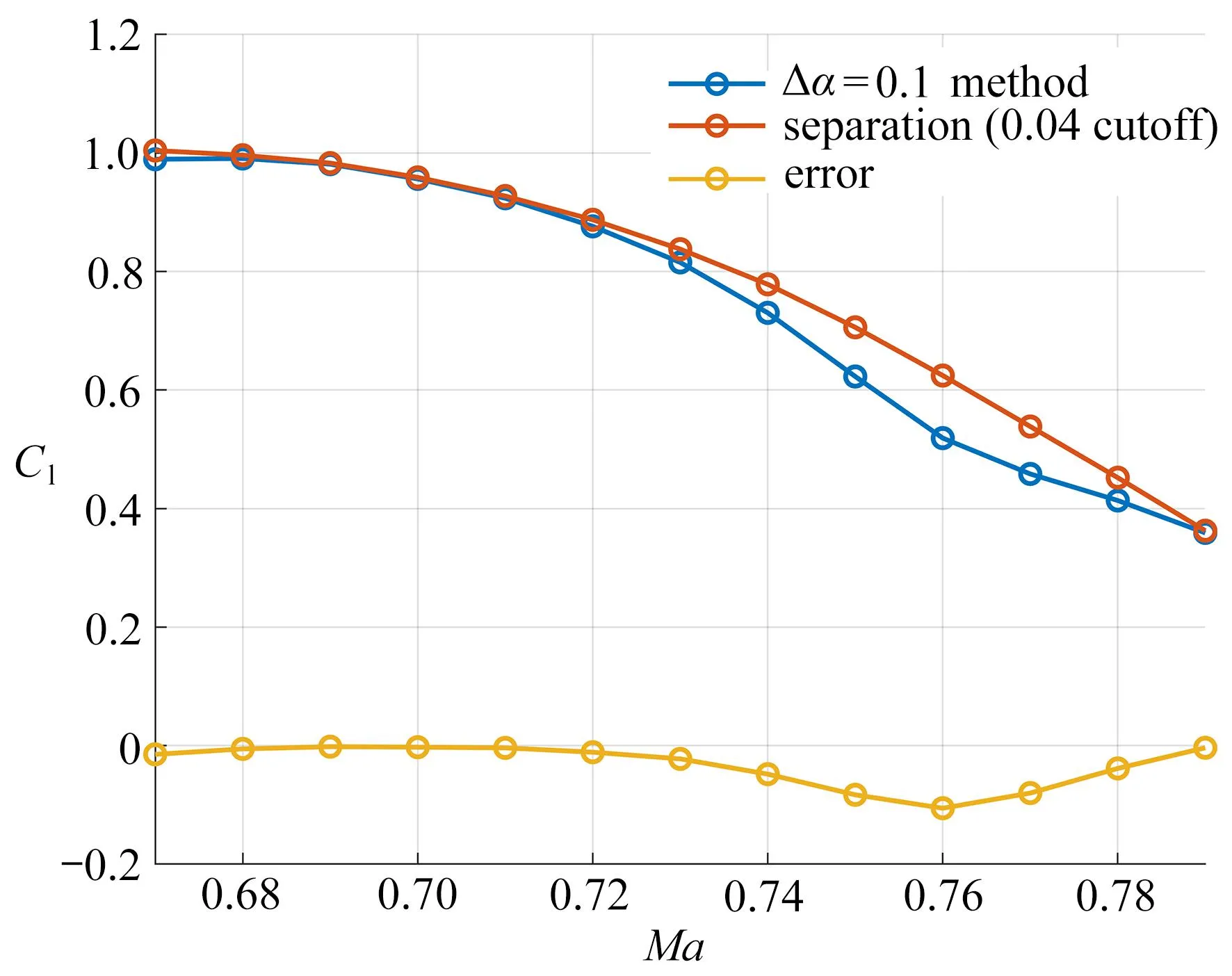
圖5 Δα=0.1方法和分離函數方法的對比
DDPG算法中經驗池的使用使得每批次訓練樣本來自不同策略,打破了原有樣本間的相關性,提高了訓練效率;同時離散的樣本在訓練中可重復使用,提高了數據利用率,減輕了對數據總量的要求.這也是后文DDPG算法效率遠高于群智能算法的重要依據之一.但算法的確定性策略會帶來探索能力的匱乏,故在訓練階段actor給出確定動作后,額外添加正態分布噪聲~N(0,σ2),并通過衰減系數φ實現前期較大的噪聲以及對應的廣泛探索能力,和后期微小的噪聲以及足夠的收斂能力.
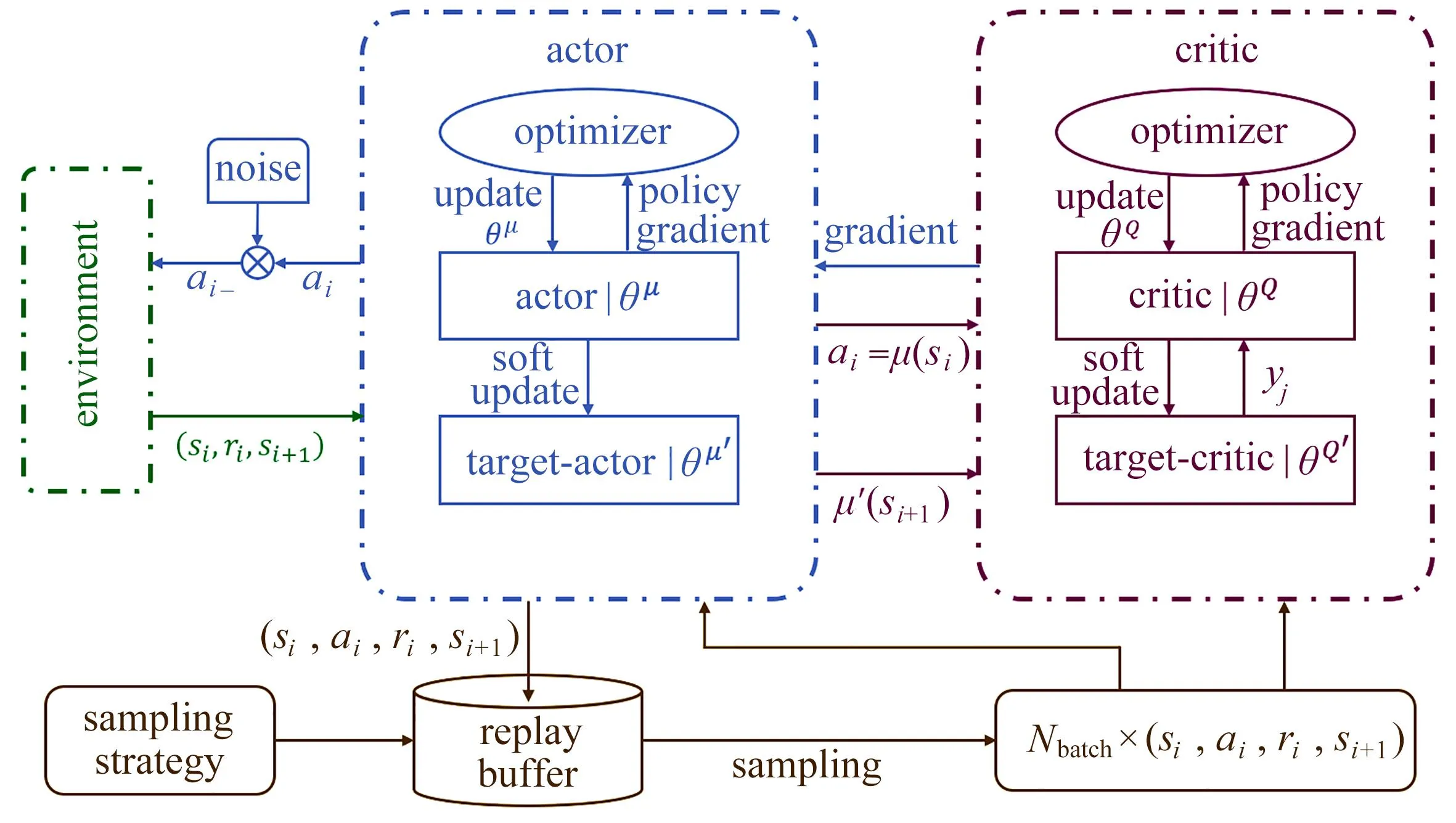
圖6 DDPG算法框架
算法1 DDPG算法流程
1 randomly initialize networkQ(s,a|θQ) andμ(s|θμ)
2 initialize target networkθQ′←θQ,θμ′←θμ
3 initialize replay buffer R
4 initialize noise parameterσ,~N(0,σ2)
5 for episode=1, EPISODE do
6 noise attenuation:σ=σ×φ
7 receive initial states1
8 while not done do
9 select actionat=μ(st|θμ)+according to the current policy
10 executeatand observe rewardrt, next statest+1, terminating information
11 store transition (st,at,rt,st+1) in R
12 sample a random minibatch ofMtransitions from R
13 setyi=ri+γQ′(si+1,μ′(si+1|θμ′)|θQ′)

15 update the actor policy using the sample policy gradient:
16 update the target networks:
θQ′←τθQ+(1-τ)θQ′
θμ′←τθμ+(1-τ)θμ′
17 end for.
2 設 計 過 程
2.1 優化模型
第4屆阻力預測會議(DPW)[24]給出跨音速運輸機公共研究模型(CRM),大量學者基于其機翼和翼型結合變彎度技術開展了多項減阻研究[20,22]和抖振性能優化研究[8-9].在Kenway等[8]基于機翼外形優化對抖振和流動分離的研究中,上表面流動分離首先發生于機翼中段,并隨迎角增加呈現向翼尖擴展的趨勢.故本文選取機翼展向60%截面為初始翼型,融合變彎度技術改善其基礎外形,在抖振性能不減的前提下,增強其巡航多升力系數點下的升阻性能.基于此,以CRM機翼和RAE2822翼型驗證三維、二維網格和計算方法的正確性,以2.5D和2.75D方法將機翼三維設計工況轉變為翼型二維設計工況.再發散得到二維非設計工況,來研究變彎度翼型的多升力系數工況優化.
CRM機翼設計工況為:巡航Mach數0.85、Reynolds數500萬、升力系數0.5.三維網格收斂性驗證如表1所示,網格數量與DPW總結文獻[24-25]相近.中等網格壓力云圖如圖7所示,不同截面壓力分布如圖8所示,參考值為文獻[26]的計算結果,文獻[27]也有類似結果.可以看出三維中等網格已基本收斂,可以用于后續研究.

表1 CRM機翼網格收斂性驗證
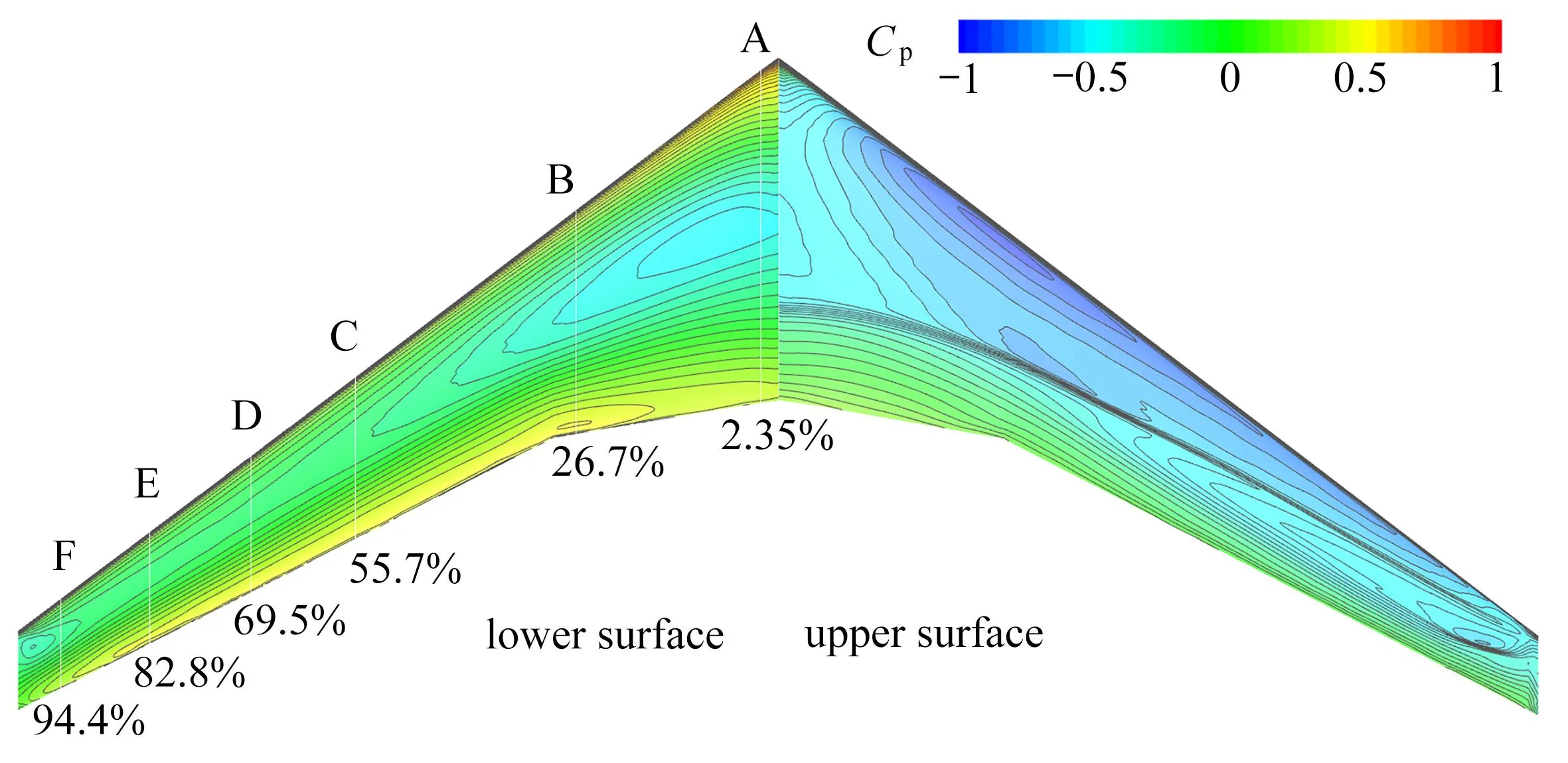
圖7 機翼表面壓力云圖
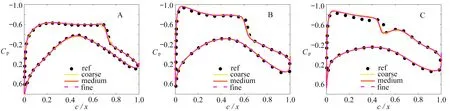
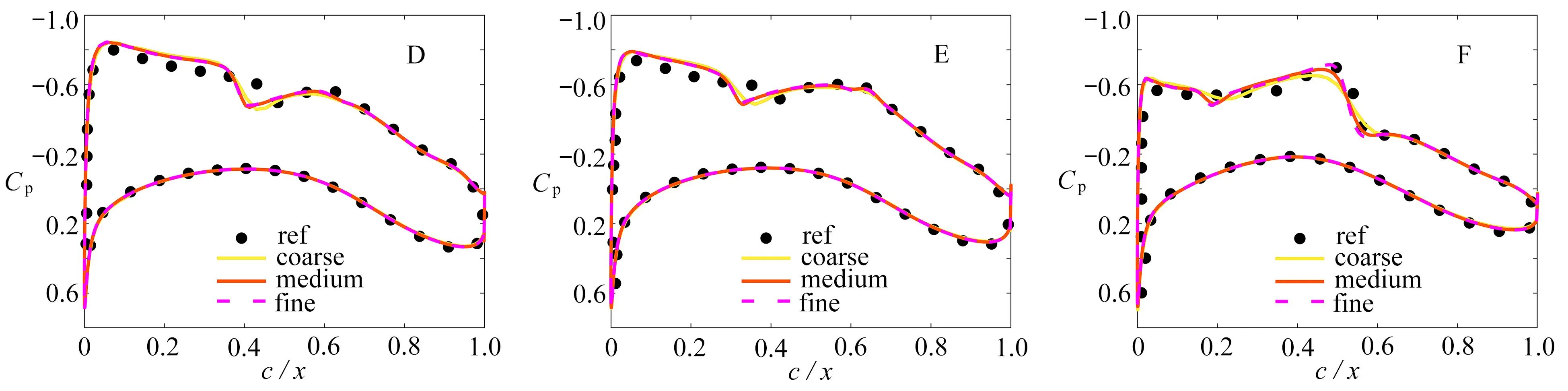
圖8 不同網格精度下機翼截面壓力分布
RAE2822翼型驗證工況為:Mach數0.73,Reynolds數6.5×106,迎角3.19°(升力系數0.803),二維網格收斂性驗證如圖9所示,其中參考值ref來自AGARD的case 9[28].參考值的工況為:Ma=0.73,α=3.19°,Cl=0.803,Cd=0.016 8.虛曲線是Mach數修正為0.734[29],能更精確地對照ref的激波位置.可以看出二維中等網格已基本收斂,可以用于后續研究.
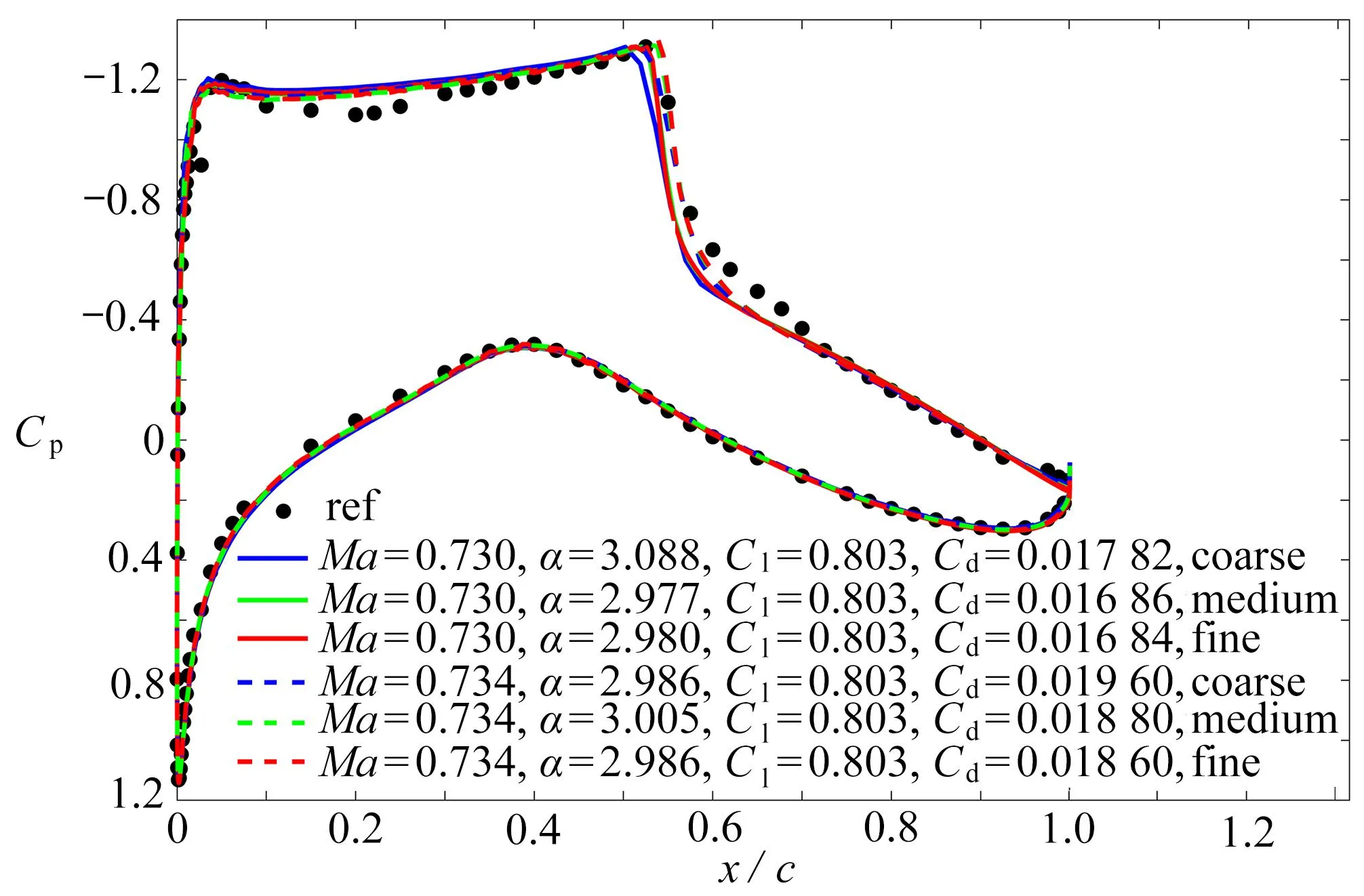
圖9 RAE2822翼型網格收斂性驗證
2.5D和2.75D方法是三維與二維流動差異的彌補,使得二維設計仍對三維設計有足夠的貢獻.2.5D方法稱為經典后掠理論或余弦規則[30],適用于翼型與無限翼展后掠翼之間的參數轉換,如式(3)—(6)所示:
C′p=Cp/cos2Λ,
(3)
C′l=Cl/cos2Λ,
(4)
C′d=Cd/cos2Λ,
(5)
M′∞=M∞·cosΛ,
(6)
等式左邊為二維參數,右邊為三維參數,Λ為1/4弦線后掠角.
而實際機翼還需考慮根尖效應的影響,在設計時額外對二維升力進行1.1~1.2倍放大[31],即
C′l=(1.1~1.2)Cl/cos2Λ.
(7)
但跨聲速機翼/翼型上表面激波的出現,導致2.5D方法精度有了較大下降,基于激波位置附近1/2弦線后掠角的2.75D方法[32-33]就迅速發展而成,限于篇幅,不做介紹.而Streit等[34]也以1/2弦線后掠角改進了2.5D方法.本文分別以2.75D和改進2.5D方法將三維工況(Ma和Cl)轉換為二維工況,計算截面翼型的壓力分布,再轉換回三維壓力分布,與機翼實際三維計算結果對比,如圖10所示.可見改進后的2.5D與3D計算結果基本一致,只是因為缺少激波后的機翼展向流動信息導致激波后壓力分布有些差距.但2.75D方法不僅激波后表現不佳,在前緣上表面、尾緣上下表面更是與3D結果有著較大差距.故本文以改進2.5D方法進行后續設計,轉換前后的設計工況如表2所示,機翼1/2弦線后掠角取29.88°.

表2 2.5D方法工況轉換結果
基于巡航過程中燃油重量的不斷變化,設定巡航為升力系數0.7至0.9,0.01為間隔的均勻工況.如圖2所示,低于0.7時,各彎度下升阻比相近,變彎度設計意義不大;高于0.9時也對應于最大角度的變彎度.故設定工況為0.7至0.9,也使得0.8為工況中心.文獻[35]介紹了具體根據巡航不同階段重量變化的工況比例,本文參考文獻[26],以多工況同等重要做方法研究.即設定優化目標為多工況下的平均最大升阻比最大,對應為圖2中不同彎度下的最大升阻比曲線的平均值最大.而若以此曲線按不同權值加權平均,也可實現不同重量工況的重要程度分級.但對本文方法研究無影響,僅是設計結果側重于不同重量工況階段,故不深入考慮.翼型的后緣襟翼角度離散為[0°,1°,2°,3°,4°,5°],更大范圍的角度變化在0.7至0.9的工況內無明顯升阻性能提升,更密的襟翼角度分布也是使得最大升阻比曲線更加光滑,無突出性能提升.
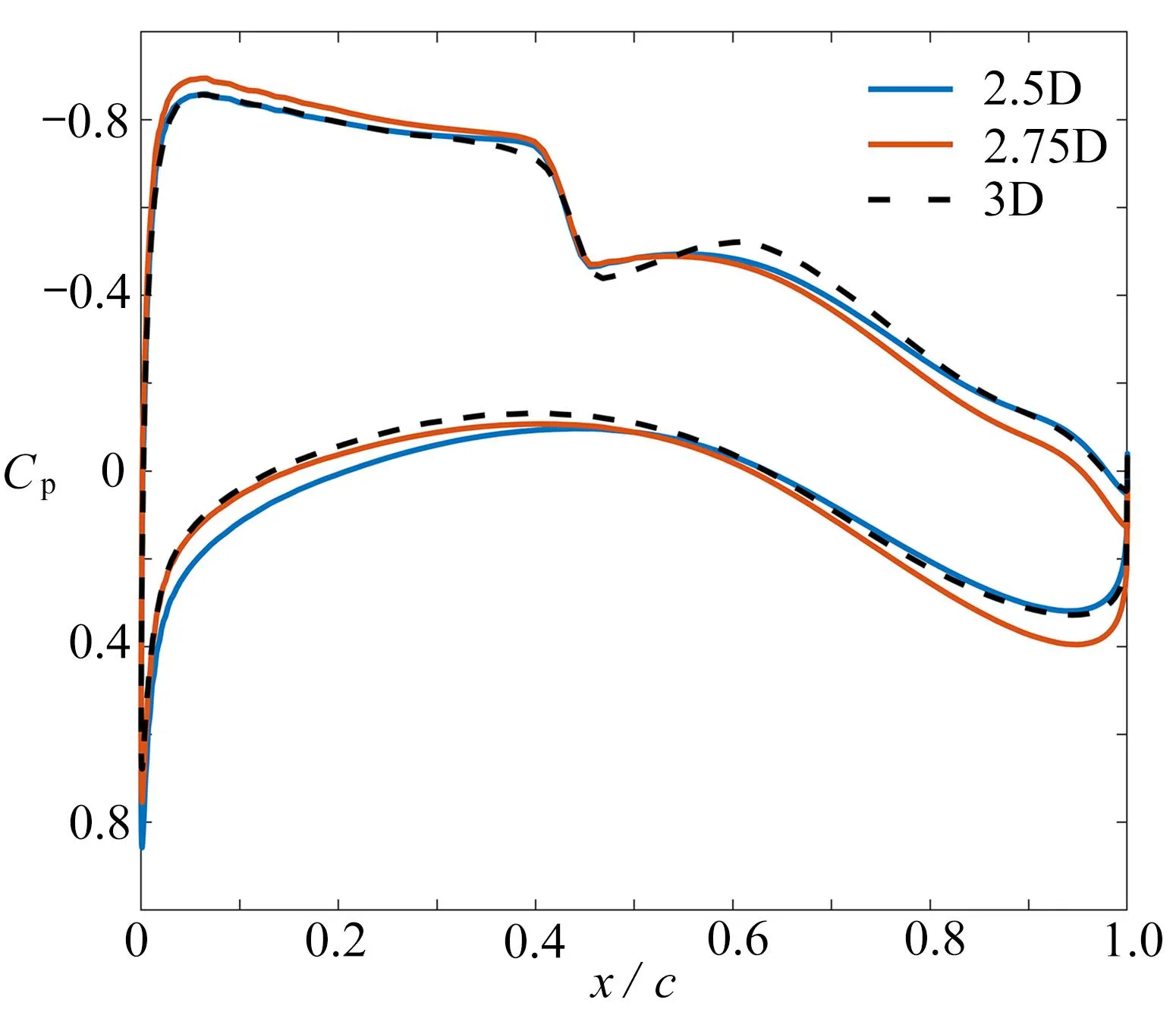
圖10 2.5D、2.75D和3D計算的壓力分布對比

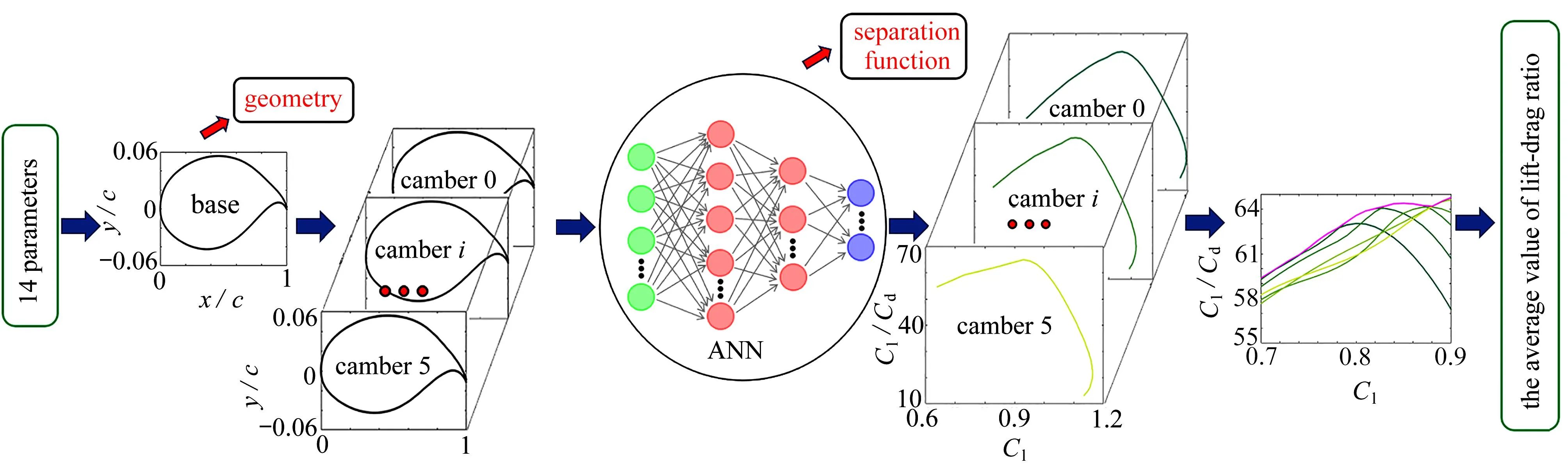
圖11 優化模型
在優化模型中,額外添加翼型厚度約束,為前緣半徑、最大厚度、尾緣厚度不小于初始的90%(不小于初始值為對照組);添加分離函數約束,為升力系數1.075以前分離函數值不大于0.04.分離函數值隨升力系數增長而增長,1.075前分離函數值不大于0.04也就保證了分離函數值達到0.04時升力系數不小于1.075,即抖振邊界不小于1.075.如圖14所示,1.075為初始翼型抖振邊界,約為設計升力系數0.798的1.35倍,圖14為初始翼型不同彎度下兩種方法得到的抖振邊界.優化模型結合變彎度技術和分離函數方法,實現輸入14個CST參數,輸出平均最大升阻比和多重約束信息.
2.2 優化過程
基于上述優化模型,本文以翼型14維CST參數作為狀態,14維參數變化量作為動作,設立DDPG方法,從翼型初始外形出發,學習回報最高的修型路線.其中回報函數如式(8)所示,r為獎勵函數值,x為CST參數,f(x)為目標項,g(x)為約束項;f(x)具體如式(9)所示,g(x)在不同約束不滿足時取不同的常數值:
r=f(x)-g(x),
(8)
f(x)=c1×ec2×(Cl(x)/Cd(x))-c3,
(9)
式中Cl(x)與Cd(x)為CST參數對應翼型的升阻力系數,c1,c2,c3為常數,在本文中取值為0.005,0.15,100,使得目標項f(x)在達到較優值附近時回報函數具有更大的梯度,進而使得較優值附近的微小進步也能夠被智能體所學習.
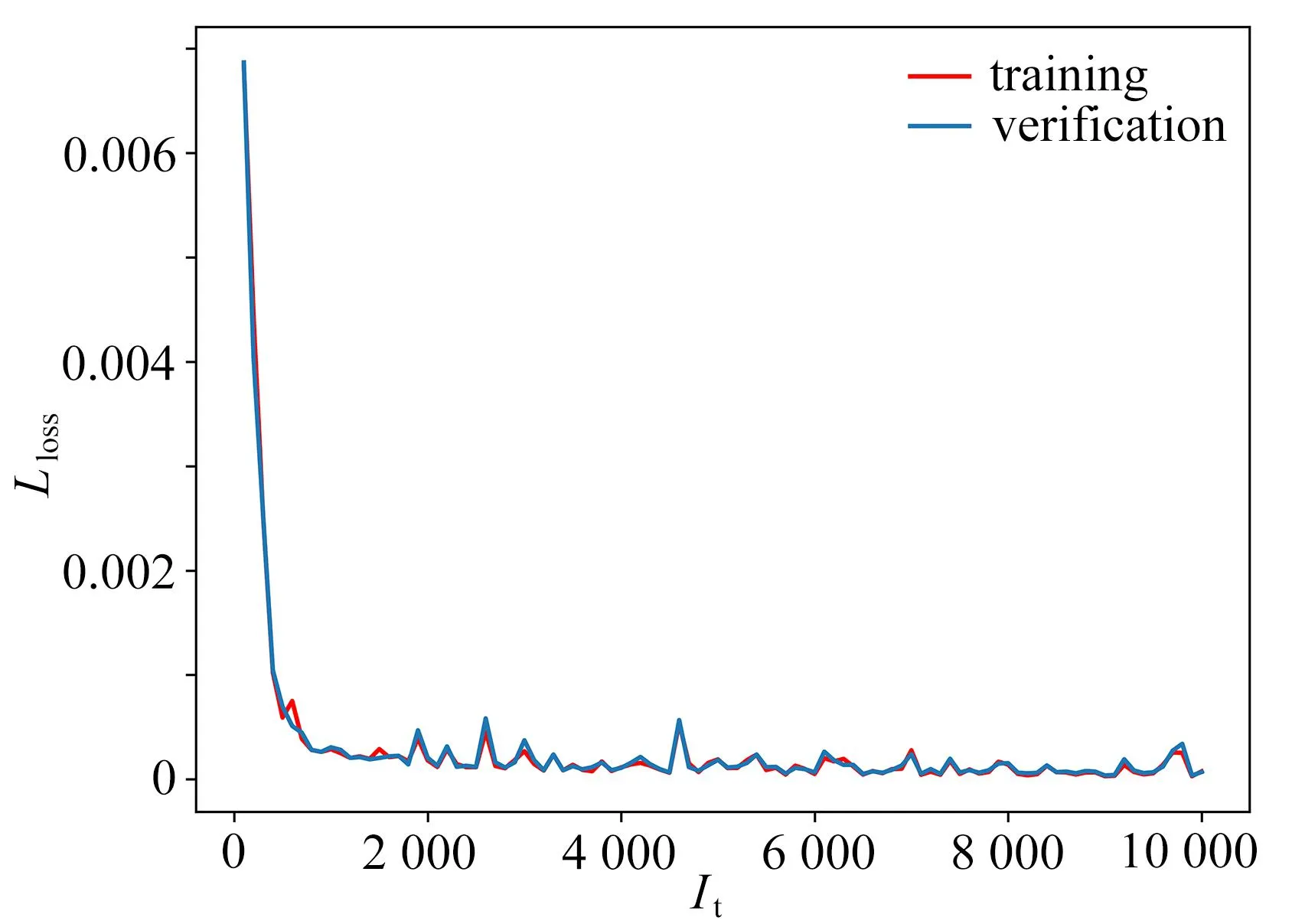
圖12 訓練集和驗證集的損失函數收斂曲線
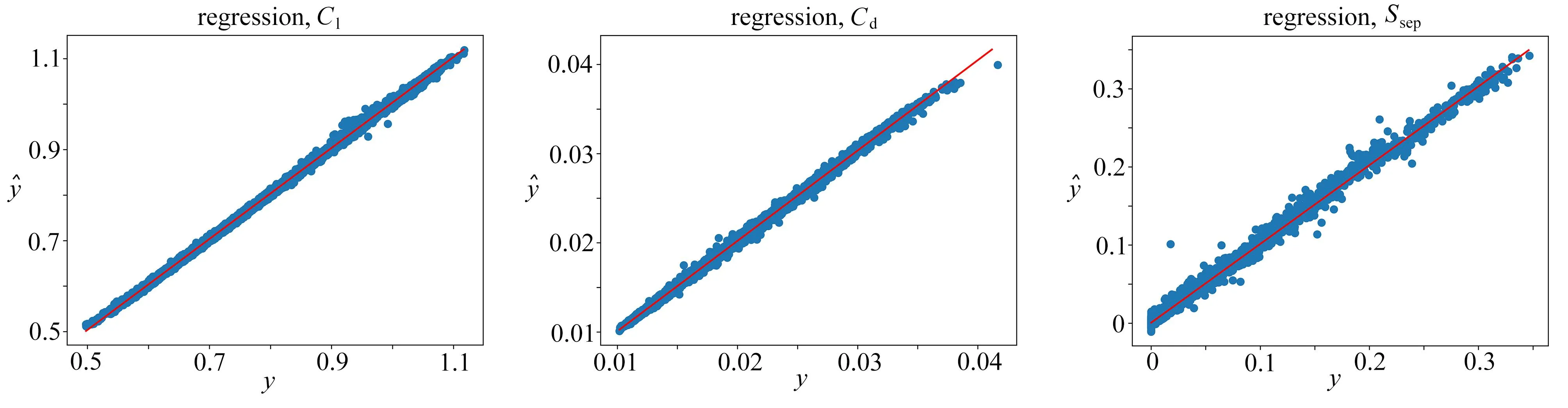
圖13 整體數據集預測的Cl, Cd, Ssep的線性回歸圖
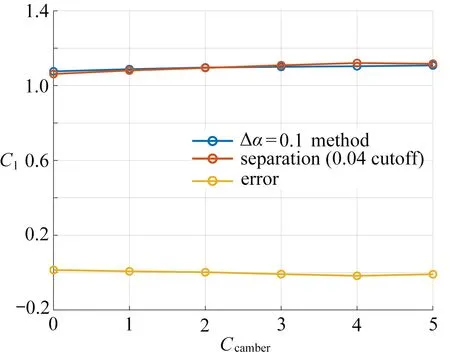
圖14 初始翼型不同彎度下的抖振邊界
以此DDPG算法進行尋優,收斂曲線如圖15所示,橫軸為訓練代數,縱軸為獎勵函數值.其中紅色曲線為5步修型,actor動作上限為狀態空間大小的1/5,即actor通過5步可至狀態空間內的任意狀態,actor在達到給定升阻比以上或是累計5步后停止修型.藍色曲線為 1 步修型,actor動作上限為狀態空間大小,即1步可至狀態空間內的任意狀態.
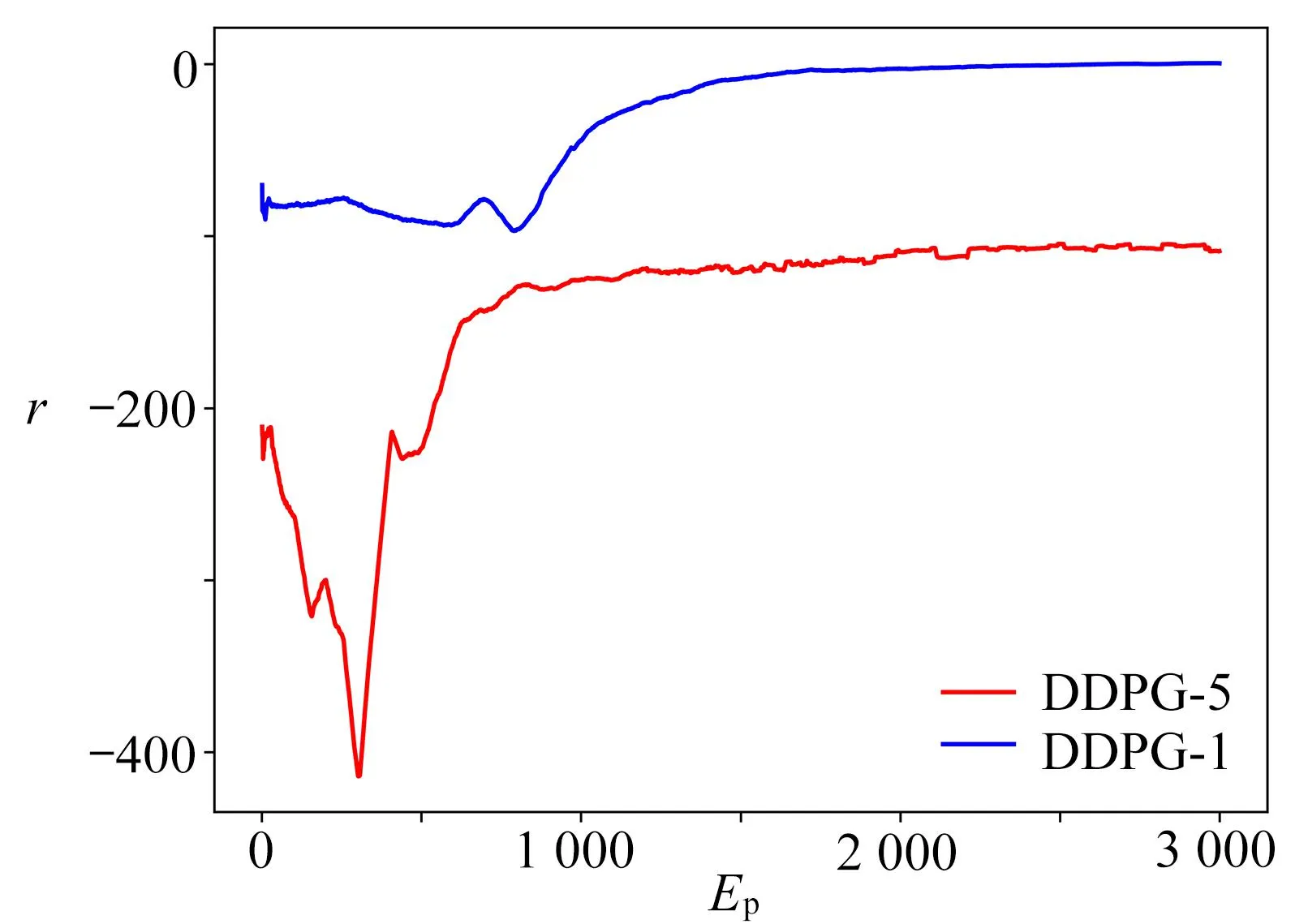
圖15 DDPG收斂曲線
為驗證DDPG方法設計結果的合理性,用優劣兩種群智能算法對本文模型的優化結果作對比,算法為PSO[38]和改進GWO[39].兩種算法流程相似,如圖16所示,其中適應度為優化目標的相反數(轉為min問題),不滿足約束的個體適應度受到額外懲罰.兩種算法收斂曲線如圖17所示,種群大小均為60,改進GWO具有更強的尋優能力,其頭狼的額外混沌搜索能顯著增強尋優效率和增加跳出局部最優的能力.
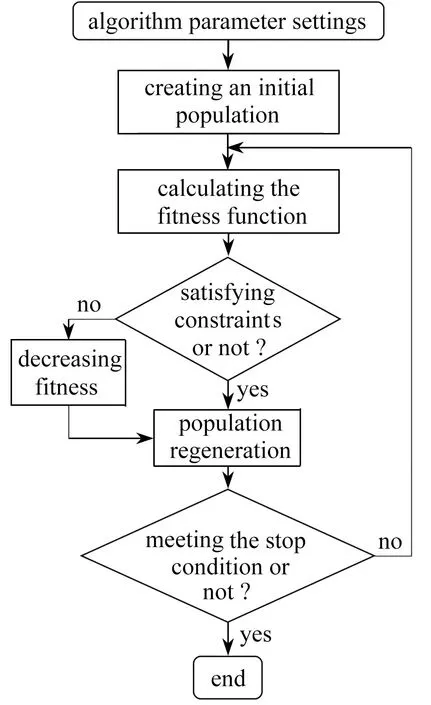
圖16 群智能算法流程
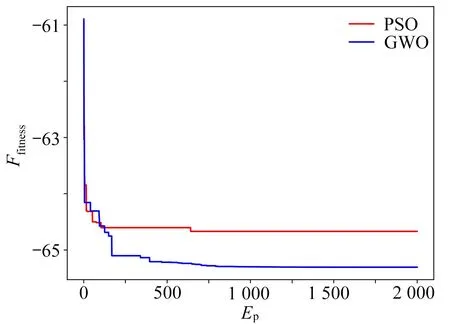
圖17 群智能算法收斂曲線
2.3 結果分析
初始翼型和PSO、GWO、DDPG-5、DDPG-1的優化翼型結果如表3所示,base 0表示不可變彎度的初始翼型,base表示可變彎度初始翼型.第一行為基于優化模型得到的平均最大升阻比,第二行為算法運行時間.第三、四行為各翼型CFD計算驗證,分別是平均最大升阻比和抖振邊界.
其中各翼型基于優化模型和CFD計算得到的升阻比相近,誤差在0.5%以內,說明本文基于ANN的優化模型的精度是可以接受的.GWO、DDPG-5、DDPG-1優化升阻比相近,且相比于PSO有更大的優化效果,說明了本文DDPG算法對變彎度翼型優化模型有著較強的優化效果,與較優的群智能算法有相當的優化能力,這是actor-critic網絡架構和衰減噪聲的作用.actor-critic的結構使得DDPG算法能夠更容易和更穩定地學會修型策略,衰減的噪聲則在保證后期收斂能力的同時增強了前期的探索能力,保證了DDPG算法較強的尋優能力.而分離函數在升力系數1.075前不大于0.04的約束也使得各優化翼型均有不小于1.075的抖振邊界,淘汰掉了以降低抖振性能為代價減阻的一批翼型.最后在算法效率方面,雖通過ANN替代了CFD計算過程,但每個翼型以不同彎度和迎角對ANN的多次調用仍是算法運行的主要時間消耗,如何從更少的樣本中學會優化方式是算法效率的關鍵.DDPG算法一邊根據當前策略填充經驗池,一邊從經驗池中抽取歷史經驗學習,可實現對于歷史經驗的重復使用,使其在樣本利用率方面具有顯見的優勢,也就具有了優于群智能算法的強大尋優效率.而1步修型的DDPG-1在相同算法代數下僅生成和使用5步修型1/5的經驗數據,也就具有近5倍的算法效率,且優化能力也不差于其他幾種,故DDPG-1無疑是本文優化能力強且效率最高的算法,其優化結果相比于初始不可變彎翼型也取得了6.8%的升阻比提升.

表3 優化結果比較
初始翼型和不同優化翼型的升阻比曲線如圖18所示,曲線的拐點是彎度發生變化,從升力系數0.7至0.9每條曲線的襟翼角度均從0°逐漸增加至5°.圖18中每條曲線均等價于圖2中的紫色曲線,是不同彎度下升阻比曲線的最大值.隨升力系數增長,升阻比與迎角均增長,在達到拐點時,彎度與迎角發生突變.之后升阻比與迎角均隨升力系數繼續增長,形成整條最大值曲線.而彎度若能連續變化,這些曲線的拐點也會更加細密,拐點處也就不會呈現嚴重的不連續現象,或者說曲線本身就會更加光滑連續.但曲線所處范圍不會在圖18的基礎上發生太大變化,即平均最大升阻比的值不會有太大變化.而彎度連續變化會使得數據庫需求樣本量成倍增加,故綜合考慮下,本文以離散彎度變化來簡化設計.
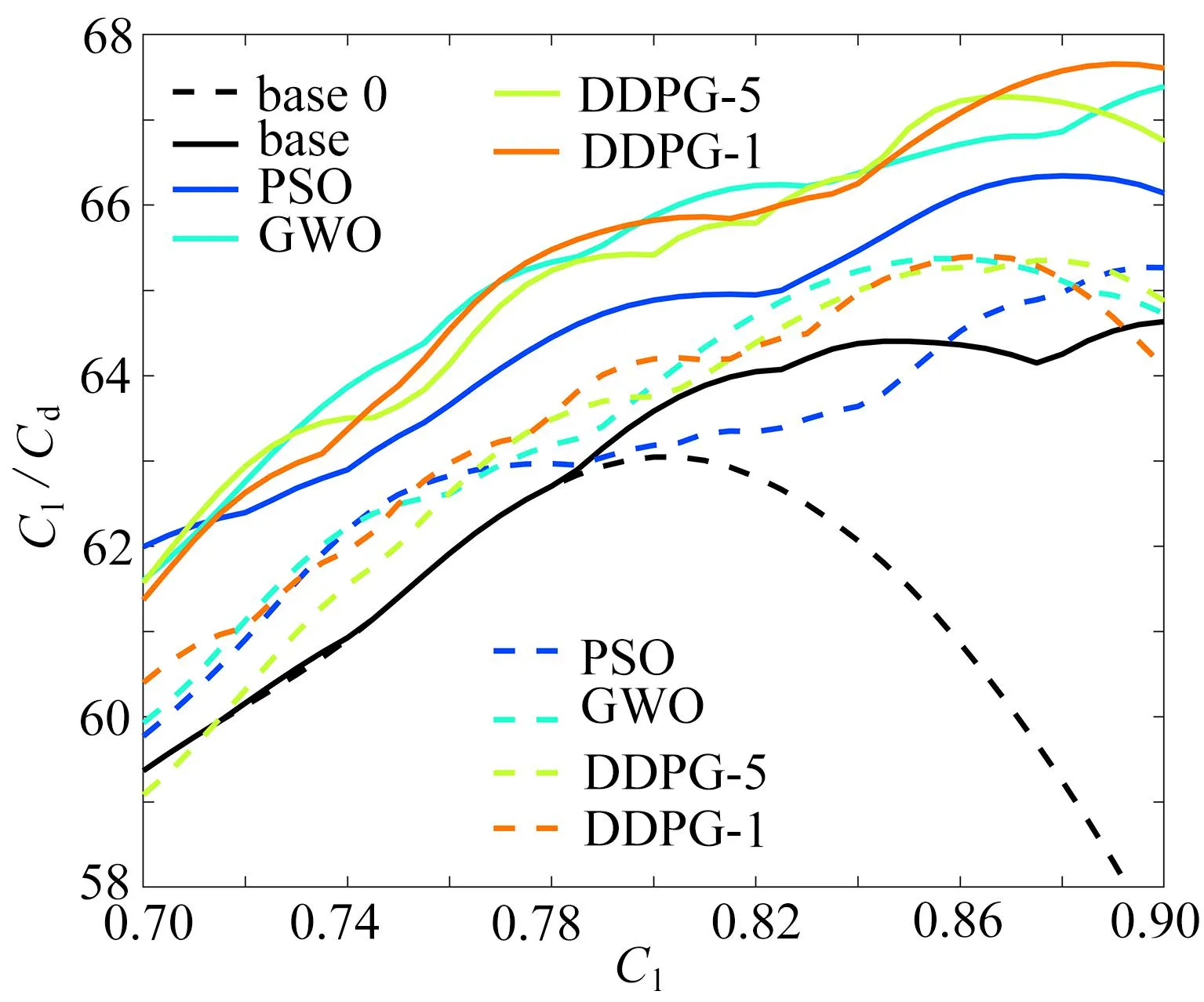
圖18 不同方法優化的升阻比最大曲線
圖18中彩色實曲線是本文厚度約束不低于初始90%的優化結果,彩色虛曲線是不低于初始100%的結果,黑色實曲線是可變彎度初始翼型,黑色虛曲線是不可變彎初始翼型.初始翼型從通用飛機標準模型CRM機翼上截取,性能本就良好,加入變彎度后在大升力系數工況下更得到明顯改善,故彩色虛曲線的群智能算法和DDPG方法在優化翼型基礎外形后均只能取得較小性能改善.而適當放松厚度約束后,才能取得如彩色實曲線所示的較大的升阻性能優化.實際翼型設計中,略微放寬厚度約束,也是提升升阻性能的重要手段,但也伴隨著機翼容積減少等負面影響,需多方面綜合考慮.
實曲線對應翼型基礎幾何外形如圖19所示,可見不同優化結果均是翼型前半段下表面收縮,后半段整體下沉,尾緣變化更加平緩.這些變化使得翼型初始彎度更小,且最大彎度位置前移.一方面使得低升力工況下阻力更小;另一方面通過尾緣變彎獲得大升力的同時,最大彎度位置不會過于后移,也對應具有更小的阻力.如此,優化后翼型在不同升力系數工況下均具有比初始不可變彎翼型更優的升阻性能,在整段巡航中具有更高的效率.
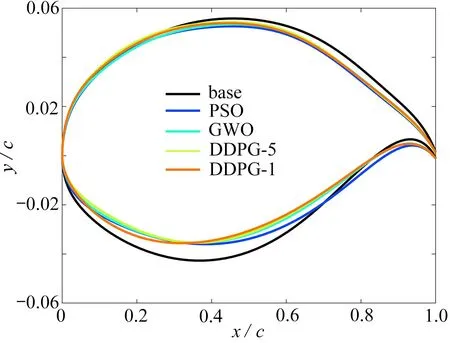
圖19 不同方法優化的幾何外形
圖20 錐形后掠翼
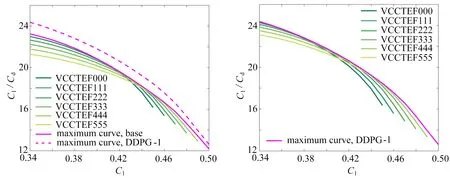
(a) 初始 (b) DDPG-1優化后(a) Initial curves (b) Curves after optimization by DDPG-1圖21 機翼升阻比曲線
基于僅優化一個截面翼型的基礎,分別以初始翼型和DDPG-1優化翼型作截面,參考CRM機翼外翼段,以弦長1、展弦比6.6、后掠角35°、稍根比0.376作錐形后掠翼.根據改進2.5D方法對應三維工況為Mach數0.9,升力系數0.446,這里外翼段后掠角不等同于CRM機翼后掠角,故三維工況有些變化.錐形后掠翼幾何外形如圖20所示,升阻比曲線如圖21所示.可見變彎度提高了多工況下的升阻比,且DDPG-1優化也提高了后掠翼的升阻性能,說明變彎度以及二維翼型優化對三維機翼優化有著實際的貢獻.
3 總 結
1) 本文基于VCCTEF思想設計了一種變彎度翼型優化模型,通過翼型基礎幾何外形優化和彎度改變實現巡航多升力系數工況升阻性能提高,進而提升整段巡航性能.
2) 本文基于抖振與流動分離的伴隨關系,發展了二維翼型分離函數方法,通過對上表面流動分離的約束,限制抖振邊界不低于初始翼型,避免升阻性能優化帶來抖振性能衰減的負面影響.文中也通過對比傳統抖振邊界判斷Δα=0.1方法驗證了本文分離函數方法的有效性.
3) 本文將DDPG方法應用于上述變彎度翼型模型在巡航階段的多升力系數工況優化,通過對算法的設置,實現DDPG智能體對多彎度多約束復雜模型的快速高效尋優.并通過與群智能算法優化結果的對比,驗證了DDPG方法的可行性與高效性.
4) 本文以上述優化模型與方法實現了CRM機翼截面翼型的變彎度設計與優化,實現了巡航階段6.8%的升阻比提升,并通過2.5D方法驗證了二維變彎度翼型設計對三維機翼設計的貢獻.
猜你喜歡
房地產導刊(2022年5期)2022-06-01 06:20:14
建材發展導向(2021年12期)2021-07-22 08:06:48
建材發展導向(2021年7期)2021-07-16 07:07:52
中學生數理化(高中版.高二數學)(2021年12期)2021-04-26 07:43:48
藝術啟蒙(2018年7期)2018-08-23 09:14:18
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
Coco薇(2016年2期)2016-03-22 02:42:52
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長指南(2015年4期)2015-05-19 14:47:56
