淺析整車HUD標定失敗的影響因素
2024-01-11 19:43:01陸公道
時代汽車 2023年24期
陸公道

摘 要:隨著汽車行業智能化的發展,越來越多車企提出智能駕駛座艙概念,抬頭顯示作為智能座艙系統的一個重要模塊,逐步得到推廣和應用。目前主流的應用方案是風擋式抬頭顯示,不僅對抬頭顯示與智能座艙控制模塊交互通訊有較高的要求,而且在安裝尺寸鏈上存在較高精度要求,同時標定檢測設備也提出很高要求,這些都是直接影響整車標定成功的重要因素。
關鍵詞:智能座艙 抬頭顯示 尺寸鏈 檢測標定
1 引言
汽車抬頭顯示(Head Up Display,HUD),是將儀表中導航路線、檔位信息和時速信息通過HUD發出光源將信息投影在前擋玻璃,或者前方形成虛擬的導航信息,駕駛員可以不用低頭正常觀察前方獲取相關信息。目前主流HUD主要為W-HUD(Windshield HUD)和AR-HUD(Augmented Reality HUD)兩種類型,W-HUD是通過光學投影原理,將光投射在前擋風玻璃上,駕駛員觀察前擋玻璃信息即可。AR-HUD 利用了增強現實技術,將虛像信息和現實路況實時信息進行疊加,讓駕駛員更直接獲取信息,后續與ADAS相關功能結合使用,如圖1。
本文基于HUD在整車裝配過程中的制造因素以及HUD自身存在的風險,闡述W-HUD在出廠控制的標定和檢測環節遇到的失效模式及對應的解決方案。
2 風擋HUD成像及標定原理
風擋HUD是設備內部通過高強度光源發出光束,經過HUD內部的大小反光鏡面將光束投射至擋風玻璃,駕駛人眼睛捕捉獲得相關信息。HUD設備內部可程序高度可以調整反射鏡面角度來實現,反光鏡是依據電機調整從而實現角度的調整。整車的UI界面中通常也包括HUD高度的設定,UI界面的指令轉化CAN信號,HUD根據UI的指令切換不同高度擋位,成像可以投射不同位置,以此滿足不同身高駕駛人的實際需求。
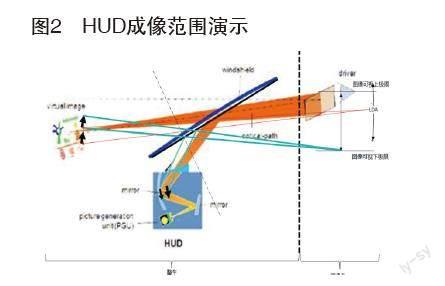
主機廠的HUD檢測標定首先要求車輛停放在規定的標定工位上,車輛保持工程定義的姿態,通過上位機給HUD發診斷命令,調用不同參數標定時專用的圖像,標定設備的相機去捕捉HUD投射的成像,經過標定設備的程序算法去檢測成像是否合格。人眼位置、成像距離、下視角以及HUD圖像調節的原理如圖2所示。
目前評價HUD成像是否合格的參數包括兩部分: (1)主要與模塊相關的參數,包括: 成像距離、成像尺寸、及分辨率。以上因素由HUD模塊中的投射光源、顯示器、反射鏡、弧面鏡的形式和位置決定,模塊內部結構或內部參數不變更,以上參數不會有大的波動。(2)主要與模塊在車身安裝位置相關的參數,包括:下視角、左視角以及投影距離等。
對于各主機廠出廠前通常會對以下主要的參數進行檢測標定,以此規避HUD成像重影、成像傾斜、成像位置錯誤等問題。
2.1 視場角(FOV):標定眼盒點距離投影成像上下邊緣的夾角定義為垂直視場角,與成像左右邊緣的夾角定義為水平視場角,主要檢測成像的面積大小。
2.2 下視角(LDA):標定眼盒點與成像中心點的夾角,主要檢測成像的高度,避免成像大小合格但是出現過高或者過低的現象。
2.3 左視角(LOA):標定眼盒點與成像左邊緣的夾角,主要檢測成像的左右位置,避免成像偏向一側,駕駛員觀察的圖像非中心位置。
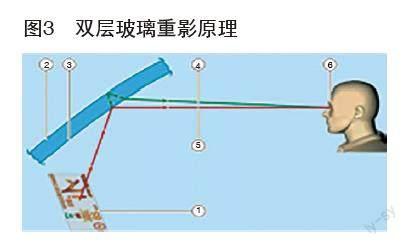
2.4 重影:由于HUD成像經過雙層玻璃的反射,雙層玻璃位置差異造成的成像重影,一般用實際圖像的Z向尺寸與重影圖像的Z向尺寸差值評價重影是否合格。
2.5 畸變率:是指成像過程中所產生的圖像像元的幾何位置相對于參照系統(地面實際位置或地形圖)發生的擠壓、伸展、偏移和扭曲等變形,使圖像的幾何位置、尺寸、形狀、方位等發生改變。虛像點陣圖上選取任一點到標準圖像中心點距離與標準圖像對應點到標準圖像中心點距離差,標準圖像對應選取的點到標準圖像中心點距離之比的最大值評價畸變率大小。一般1%以下人眼就無法感知明顯的畸變現象。
2.6 旋轉角:用來定義標定相機捕獲的成像與設備程序中水平角是否存在旋轉角度。考慮旋轉角在制造過程的尺寸鏈很長,一般公差角度設定角度為2°,小角度的偏差人眼不會明顯感知。
不同主機廠對于HUD的檢測標定評價細則以及設備的邏輯算法是有所不同,整體上都是圍繞上面6項參數對整車HUD成像進行評價,以下為兩家主機廠HUD標定的項目及評價成像的對比,如表1。
3 整車標定失敗原因及排查對策
基于某主機廠的檢測標定失敗的案例,各個參數的常見標定失效模式以及排查的方向做了如下匯總。
3.1 視場角不合格:視場角是闡述HUD投影成像的面積大小,一般HUD零件在出廠均有EOL測試,包括了HUD成像的視場角大小。當出現視場角標定不合格時,首先需要檢查標定相機捕捉的成像是否完整,如果成像不完整需要檢查HUD單件投影是否完整,投影是否被HUD周邊飾板遮擋;如果整車上檢測HUD發出的投影成像無缺陷,需要重點檢查標定設備的邏輯算法、標定相機焦距,其次需要檢查車輛風擋玻璃的安裝角度,包括擋風玻璃弧度,玻璃在車身定位銷的尺寸等。風擋玻璃與水平夾角越大,HUD成像會造成投出成像偏高,并且出現垂直視場角超差。
3.2 下視角和左視角不合格:下視角與左視角和視場角算法類似,產生原因主要三個方面,HUD零件的視場角,HUD在整車儀表臺安裝位置,標定設備軟件算法問題。由于下視角和左視角受到標定相機的空間位置影響較大,相機Y向向右偏差直接造成左視角偏大,Z向向上偏差直接造成下視角偏大。雖然整車HUD成像沒有偏差,但是由于相機位置的偏差一定會造成設備計算的下視角和左視角與實際結果偏差,需要投入時間精力去排查不同車型在標定時的相機位置是否在工程定義的控制位置上,一般設備廠商可以使用三坐標核實空間位置的準確性。
3.3 重影不合格:
配合HUD使用的專用玻璃中間在成像反射區域存在一個楔形金屬箔夾層,用來避免玻璃兩面的反射重影,使得光線在經過兩個反射面后匯集成一條光路,消除雙層玻璃的反射折射帶來的重影,重影產生機理如圖3。
出現重影一般有以下原因:一是HUD零件內部通過光源在凹面鏡上發射的虛像會產生偏移,導致沒有投射到風擋特定區域。二是前擋玻璃自身用于消除雙層玻璃重影的楔形金屬箔位置偏差,導致成像沒有得到補償出現重影。三是汽車的前擋風玻璃安裝位置出現偏差,導致風擋的位置出現波動。當出現重影現象時需要優先排查風擋玻璃是否出現錯裝,其次需要檢查HUD單件投射出來的光線是否存在重影,最后擋風玻璃在車身鈑金安裝點的位置也需要排查,車身安裝點影響玻璃與HUD的夾角,會產生重影或者視場角的超差。
3.4 畸變率不合格:主機廠對畸變率的檢測和標定是基于點陣圖去判斷,如圖4中白色圓點是標準圖像(25*11),黑色圓點是實際捕捉的點陣圖,程序上會選擇實際成像點與標準成像中心點的距離差值與標準距離的比例最大值來判斷圖像的畸變大小。
畸變率不合格存在HUD自身和整車標定設備等外部環境兩個方面的原因。
一方面是由于HUD自身原因造成的成像不完整,如圖5整車標定成像左下角的圓點已經粘連,程序算法無法計算導致畸變不合格,進一步分析確認是HUD自身投射的成像點陣出現粘連,導致設備成像無法計算。
如圖6整車標定成像存在被異物遮擋,導致無法計算畸變率。進一步分析是由于HUD外殼鑄件機加工帶來的鋁絲掉落在HUD內部的鏡面上,HUD點陣圖被分割。點陣圓點被分割后,設備程序無法鎖定成像中心圓點,導致無法計算。
另一方面是由于車輛的車身姿態或者設備眼盒位置與工程定義的標準姿態差異造成的成像無法完整捕捉的情況。如果車身出現前低后高的狀態(前置車型更容易此狀態),HUD標定時車輛自帶了一個俯仰角,同時標定眼盒的俯仰角無法做相應的補償消除車身自帶的影響,會造成標定成像底部無法被捕捉到,導致設備無法標定計算。圖7是某款車型標定時的照片,由于車身處于前低后高的姿態,標定相機的俯仰角沒有能夠補償造成圖像底部出現缺失。由于儀表臺HUD飾板存在一個弧度狀態,左下角點陣明顯缺失更加明顯。
3.5 旋轉角不合格
旋轉角度由車身姿態,車身儀表臺的定位孔位置、HUD在車身安裝位置、以及零件自身圖像的偏轉情況所決定。它的運算邏輯是選擇標定成像中三組不同位置水平點陣圖(第一行、第六行、第十一行),計算三組圖像的水平與坐標水平夾角的均值。
當批量車型出現HUD旋轉角不合格時,可以通過標定數據時序圖判斷旋轉角是否出現某個時間節點的跳變,過程能力圖區判斷是否有規律性的變差,如普遍出現一個方向的偏轉,需要對標定設備進行校準,判斷程序補償是否存在偏差。另外車身姿態以及HUD在儀表臺上的安裝位置也直接影響旋轉角的大小。當車身姿態出現左右高度不一致的情況時會造成旋轉角超差,車身左高右低會形成正轉角,反之形成負轉角。儀表臺左右兩端安裝Z向偏差的影響,與車身姿態影響一致。HUD在儀表臺X向的安裝尺寸同樣影響旋轉角大小,往往容易被忽略,如果HUD左側安裝點向前方向移動,整體姿態出現旋轉,旋轉角會出現正轉角,反之會出現負轉角。
4 結束語
HUD在安全、舒適性上具有優勢,但未全面展開的原因之一就是對制造過程的一致性要求較高,HUD標定要達到穩定的狀態,HUD、風擋玻璃、車身鈑金定位、儀表臺、以及標定臺架中的攝像頭角度、程序算法、環境光線等多項因素都需要保證穩定。
對于整車下線的檢測標定,需要質量工程師充分了解標定程序算法,影響因素,運用DMAIC工具對各個相關因子系統分析判斷各個零件和尺寸的貢獻量,單個因子分析可能會存在與實際結果存在一定的差異。正文內容是基于某主機廠的HUD標定所遇到的問題,總結了失效原因的常見因素,幫助相關同行分析解決HUD在制造過程中的標定問題。
參考文獻:
[1]陳曙光.前風擋集成式抬頭顯示集成方案[J]上海大眾汽車有限公司2018.4.
[2]沈春明.車載平視顯示器光學檢測技術的發展及趨勢[J]上海復光競成科技有限公司2018.10.
