航測像控點測量與布設下的智能施藥作業研究
2024-01-09 10:07:38麻麗明沈海軍王貴麗
農機化研究 2024年4期
麻麗明,沈海軍,王貴麗,周 燕
(河北機電職業技術學院 電氣工程系,河北 邢臺 054000)
0 引言
為推進精確農業發展,利用植保無人機對果樹噴霧施藥區域像控點進行測量,通過激光雷達掃描果樹施藥目標區域,并與布設點數據進行對比,生成噴霧施藥目標點和施藥噴頭仰角控制指令,且基于增量式PID控制算法對噴頭仰角進行追蹤控制,達到施藥噴頭的精準控制,旨在為施藥精準化智能控制裝備的設計提供參考。
1 像控點測量與目標追蹤
在研究智能施藥控制時,采用的施藥機器人為一種履帶驅動式跟隨噴霧機構,利用激光雷達進行施藥區域目標對象探測;跟隨式噴霧施藥系統為多噴頭對稱式噴霧裝置,噴霧角度能夠根據施藥目標自動調節,并可根據作業需求進行左右兩側左右調節,使用離心式風機對噴霧氣流進行調節,輔助施藥霧化控制程度[1-2]。表1為智能施藥系統關鍵技術參數。
智能施藥系統主要用于樹冠層底部位置的施藥作業,與植保機配合,形成地空協同式立體植保作業模式[3]。
圖1為地空協同式植保作業模式示意圖。其中,植保機用于對地面施藥目標圖像進行測量,形成航測像控位置點;噴霧施藥機器人對樹冠層下部進行施藥,實現智能施藥控制[4]。
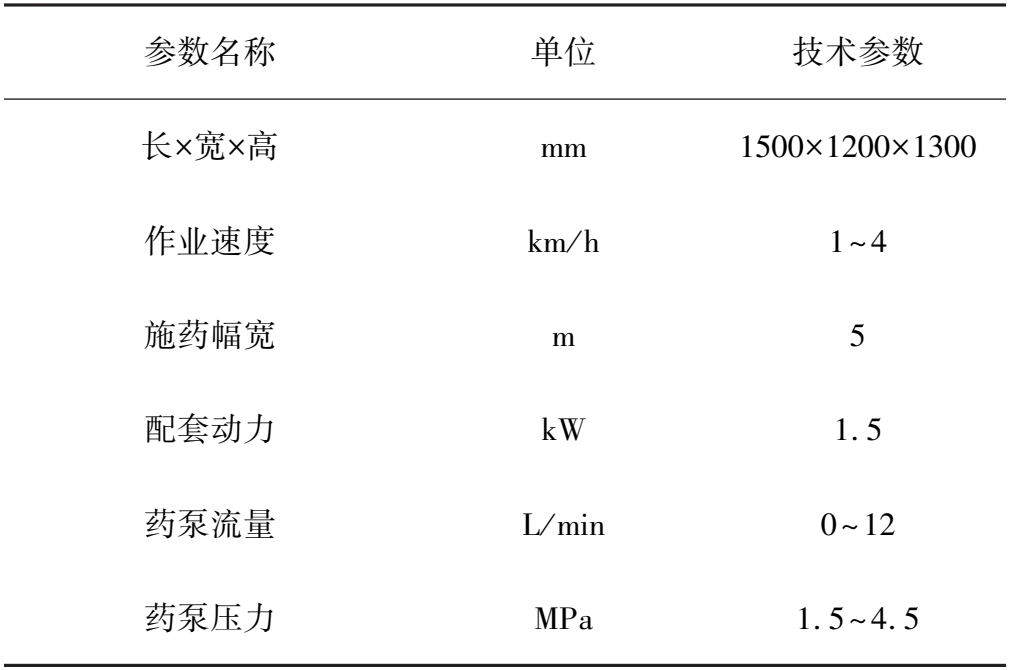
表1 智能施藥系統關鍵技術參數
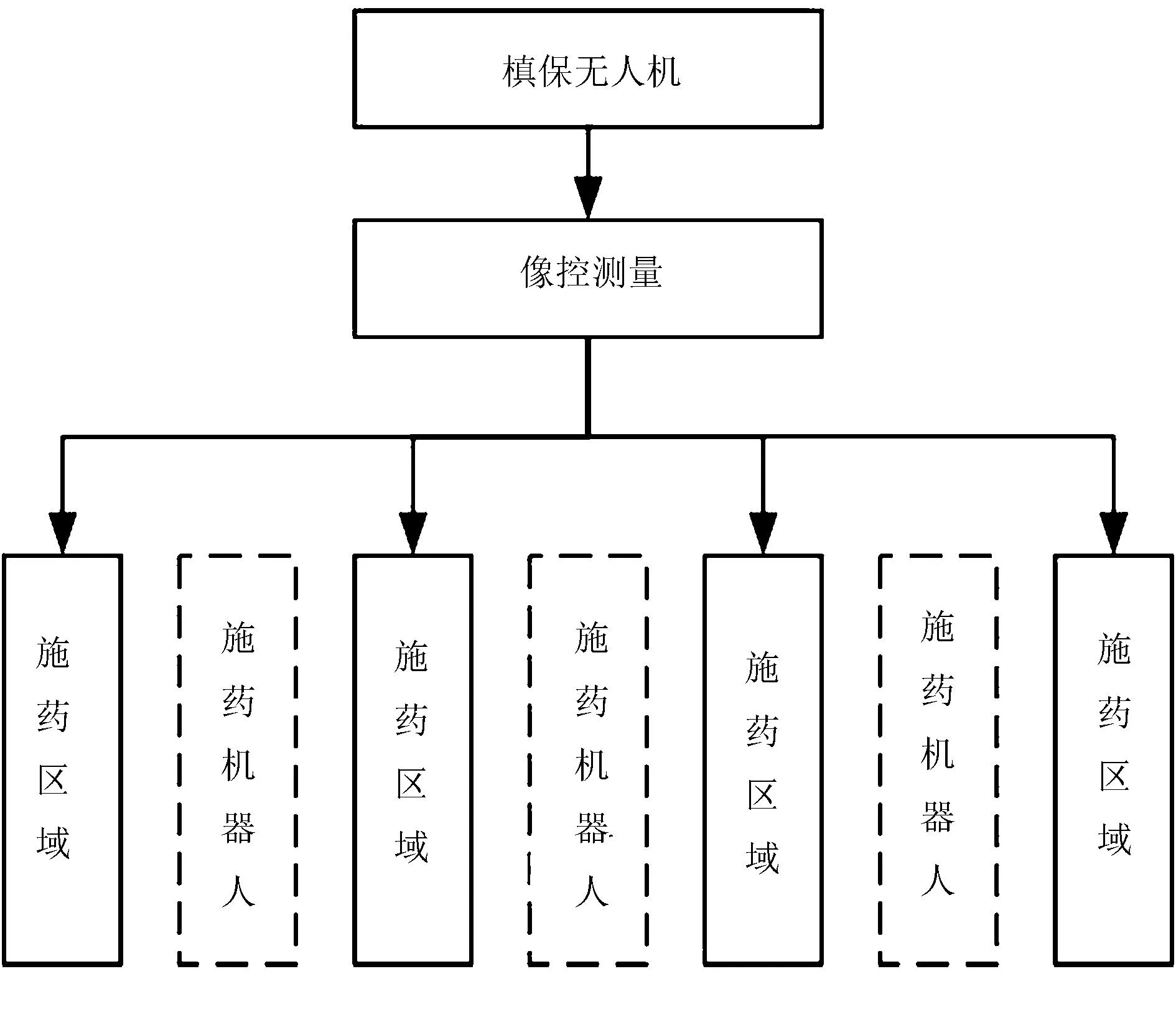
圖1 地空協同式植保作業示意圖Fig.1 Schematic diagram of ground air cooperative plant protection operation
智能施藥目標區域探測與施藥目標追蹤硬件控制框圖如圖2所示。控制系統主單元采用STM32單片機,接受無人機航測像控點圖像數據,利用脈沖調制方式進行施藥噴霧電推桿的伸縮和升降機構升降控制,根據編碼器脈沖反饋信號進行實時作業控制,工控機用于對激光雷達掃描結果和圖像數據進行分析處理,從而得出噴霧施藥目標位置坐標和噴霧施藥仰角,并將控制參數發送至主控制單元[5-6]。
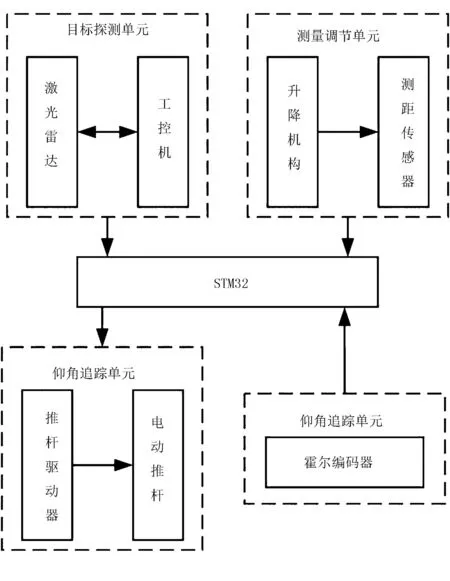
圖2 目標探測與追蹤系統硬件框圖Fig.2 Hardware block diagram of target detection and tracking system
智能噴霧施藥系統作業前,作業人員根據果樹的整體生長高度趨勢設計噴霧施藥機構高度調節范圍,使施藥噴頭頭能夠覆蓋噴霧施藥區域[7]。作業過程中,噴霧施藥系統能夠自主在施藥區域內進行行走,根據航測像控點測量數據對施藥目標區域的間隙、方位以及高度進行表征,控制系統根據雷達數據實時探測目標對象位置,并根據施藥目標位置調整施藥仰角[8]。圖3所示為智能噴霧施藥系統作業流程圖。
2 噴霧施藥區域探測方法
智能噴霧施藥裝置采用激光雷達作為傳感器,可在360°范圍內進行掃描,掃描頻率為8~20Hz,最遠掃描距離為40m,能夠滿足噴霧施藥作業過程需求[9]。掃描探測過程中,為了避免雜草和其他作物的干擾,降低系統作業過程的數據運算量,假設存在雷達掃描的單側有效區域內梯形ABCD,C為雷達探測中心,AB為探測區域上限,CD為探測區域下限,以雷達探測點所在平面為基準,基準以上掃描角度為正值,基準以下掃描角度為負值。
在噴霧施藥目標點選取過程中,當噴頭距離目標點位置過小時,會導致噴霧施藥仰角過大,施藥上噴頭超過目標噴霧區域上限,施藥下噴頭超過目標噴霧區域下限;噴霧施藥仰角過大或者過小,均會導致農藥脫離目標區域[10,11]。
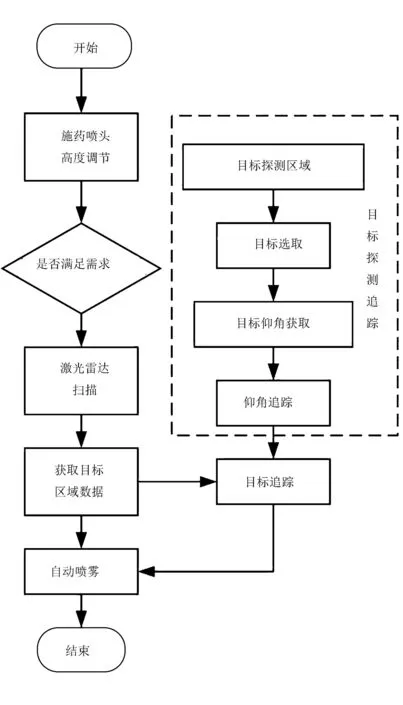
圖3 智能噴霧施藥系統作業流程圖Fig.3 Flow chart of intelligent spray spraying system
利用無人機航測像控點測量得到施藥區域平均直徑為
其中,ri為第i個施藥點的區域半徑;n為施藥點總數。
為確定施藥點位置,需要確定施藥點M的極角,根據施藥噴頭的電動推桿結構尺寸以及行程參數,施藥噴頭的最小仰角為0°,施藥噴頭的最大仰角為αmax,施藥點極角與施藥噴頭仰角極限值和激光雷達與噴頭之間的相對位置有關[12],如圖4所示。其中,圖4(a)為施藥點最小極角位置示意圖,圖4(b)為施藥點最大極角位置示意圖。

圖4 施藥點極角幾何關系Fig.4 Geometric relationship of polar angle of application point
當施藥噴頭運動平面映射到掃描平面時,假設雷達探測中心為坐標原點O,水平面為x軸,豎直面為y軸,H為施藥噴頭旋轉中心與施藥機器人底盤之間的高度差。當噴霧仰角為αmax時,施藥點極角為上邊界δmax;當噴霧仰角為0°時,施藥點極角為下邊界δmin,則根據幾何關系可以得出
施藥噴頭中心軸線與施藥點M之間的夾角表示施藥目標仰角,施藥噴頭運動過程平面映射到雷達掃描平面[13],故由幾何求解可以得出

為保證施藥噴頭仰角角度控制精度,在設計智能控制系統時,采用增量式PID噴頭仰角控制算法。控制系統首先采集電動推桿編碼器脈沖信號及施藥目標點的目標仰角,主控制器對脈沖信號進行采集和計算分析,獲取動態施藥仰角,將仰角實測值與仰角目標值對比,求解誤差值;由PID控制器進行誤差修正,向電動推桿驅動器發送控制指令[14]。圖5所示為智能施藥控制系統模型。
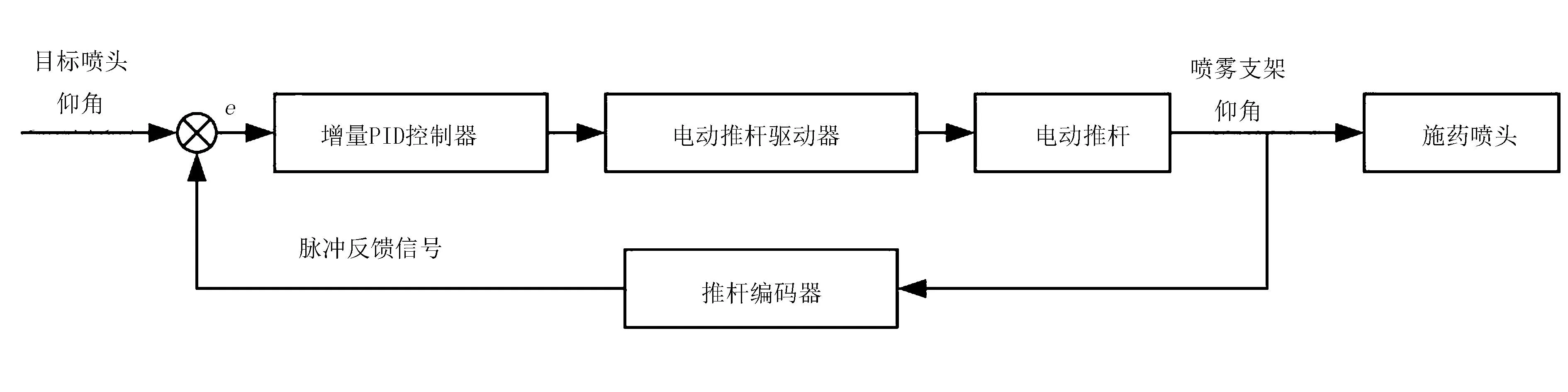
圖5 智能施藥控制系統模型Fig.5 Model of intelligent pesticide application control system
3 系統試驗分析
為了驗證施藥噴頭控制過程中航測像控點與目標仰角定位控制的準確性,在長40m、寬12米的區域內進行噴霧施藥試驗。區域內種植果樹行距和株距均為3m,果樹高度4m,果樹主枝干高1m。
試驗過程中,施藥噴頭安裝在高度為500mm的履帶機器人本體上,激光雷達安裝于機器人最前方,激光雷達與履帶點上表面之間的高度差為470mm。噴霧施藥過程中,機器人本體運行速度為0.5m/s,到達終端位置時自動調轉行駛方向,對另一行果樹繼續噴霧施藥。試驗完成后,隨機挑選3棵果樹,對噴霧施藥目標區域中心點與目標仰角數據進行統計分析。果樹施藥噴頭高度變化數據、噴頭仰角與脈沖數據如表2所示。
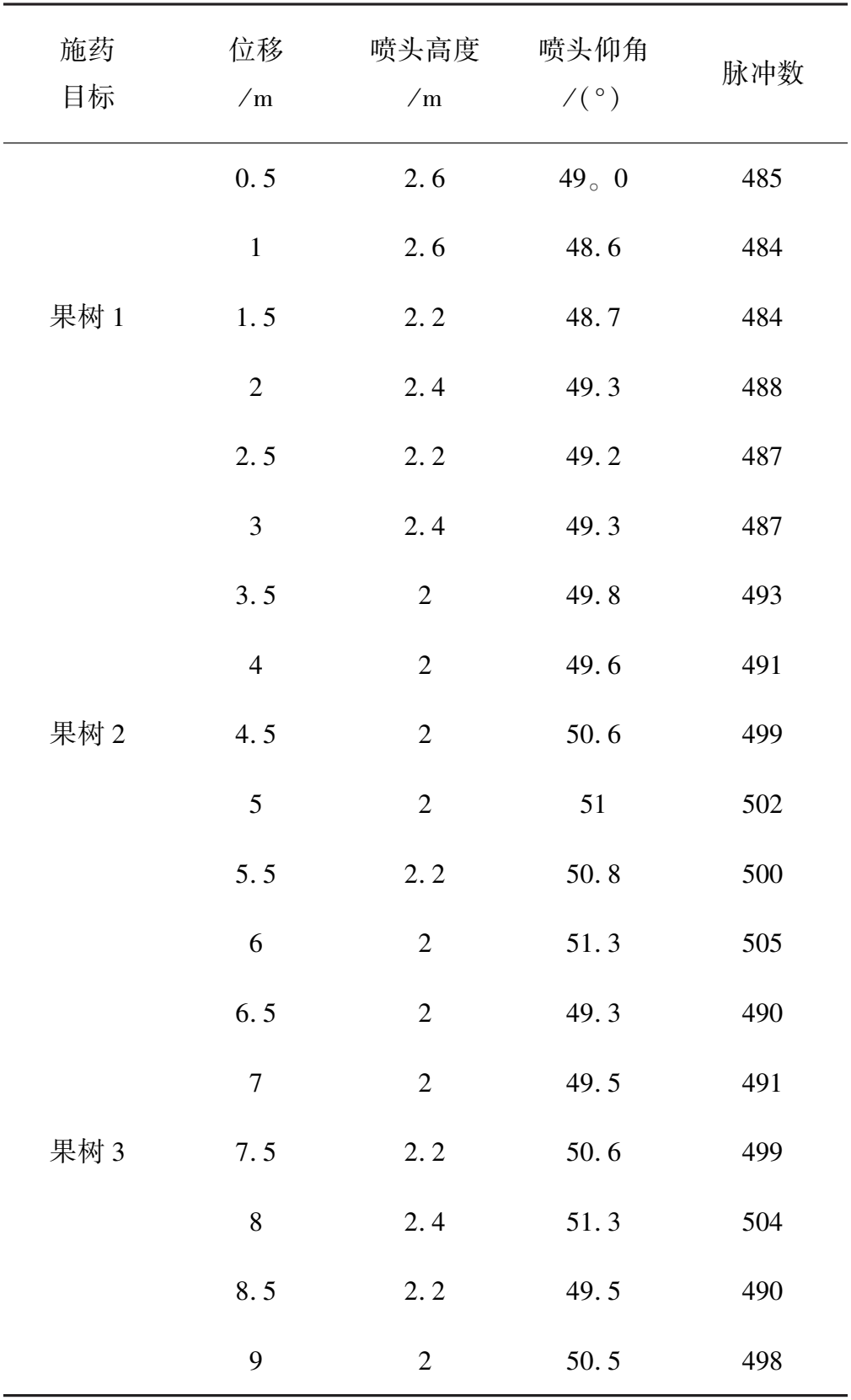
表2 噴頭高度、仰角與脈沖數據
從表2中數據可以看出:施藥噴頭的目標區域中心集中于高度2~3m范圍內,對于5m高的果樹,該高度區域可滿足樹冠下部的噴霧施藥作業需求。;棵果樹的最小施藥噴頭仰角為48°,最大施藥噴頭仰角為52°,在5°變化范圍內,脈沖數調節時間為0.02s,可滿足噴霧施藥過程中的時效需求。
4 結論
基于無人機航測點測量與布設技術,設計一種用于果園噴霧的智能探測與控制追蹤系統。系統采用雷達獲取果樹的點云數據,利用分割算法進行點云數據處理,獲取施藥目標點區域信息,并基于對航測點數據分析得到噴霧施藥仰角,實現智能化精準施藥控制,為農業智能化施藥研究提供了參考。
猜你喜歡
少年博覽·初中版(2020年6期)2020-06-12 11:42:23
文苑(2018年23期)2018-12-14 01:06:06
文苑(2018年19期)2018-11-09 01:30:14
文苑(2018年17期)2018-11-09 01:29:26
文苑(2018年21期)2018-11-09 01:22:32
故事大王(2016年7期)2016-09-22 17:30:08
中國科技博覽(2016年2期)2016-04-25 20:32:39
小學生導刊(2016年34期)2016-04-11 00:49:44
電測與儀表(2015年5期)2015-04-09 11:30:52
兒童故事畫報(2013年3期)2013-06-24 05:40:30
