柔性機械手抓取動作運動仿真分析*
2024-01-09 06:42:06王熙杰
裝備機械 2023年4期
□ 王熙杰
湖南鐵路科技職業技術學院 鐵道機車學院 湖南株洲 412006
1 分析背景
隨著當前機械手控制技術的快速發展,應用領域得到不斷拓展,要求機械手能夠靈活適應各類外形工件的控制過程。如何提高機械手對物體的適應能力,提高機械手柔性,成為開展智能機器人技術研究的一個重要方向[1-2]。
在現有各類機械手中,采用專用機械手能夠很大程度提高抓取效率,但專用機械手的適用范圍很小,缺乏良好的適應能力[3]。多指靈巧機械手可以適應多種外形結構的物體,但是需要設置大量關節,并對各關節分別開展控制,這樣才能完成復雜的驅動模式,由此導致整體處理成本提高,進而制約應用范圍[4]。
根據當前工業機械手的研究情況,優化機械手結構及簡化驅動方式,已經成為目前的關鍵研究內容。為滿足當前工業領域的應用需求,開發一種具有簡單結構與驅動模式,成本低,能夠快速推廣的柔性機械手,成為機械手領域的重要研究方向[5]。
利用流體抽充方式能夠控制抓取動作,在抓取過程中,手指對各外形物體不同的觸碰力會造成機械手腔壓力改變,進而實現手指驅動運動過程,直至所有手指都與物體保持貼合狀態。機械手能夠自主根據物體外形結構進行調整,極大擴展機械手對不同外形物體進行搬運與分揀的使用范圍,有效克服當前機械手結構過于復雜,無法有效適應各類外形工件混合抓取的不足[6]。
當前一般以仿造人手方式來設置靈巧機械手,其制備材料主要為金屬材質,可以實現很大的剛度。通常以電機、氣缸、液壓動力來實現驅動功能,通過綜合運用鉸鏈、齒輪等來實現多種復雜運動過程,確保動力被傳輸至機械手關節部位,由此達到驅動手指關節的效果[7]。
2 建模
2.1 軟件介紹
采用SolidWorks軟件Motion模塊來模擬裝配體運動過程。這一模塊提供高效的動力算法,計算過程中同時考慮材料綜合性能與慣性因素,可以準確完成各項計算。結合計算結果,繪制得到對應曲線,作為后續分析依據。也可以利用上述方法精確模擬裝配體運動狀態,再合成運動算例單元。
2.2 機械手三維模型
對柔性自適應機械手的運動過程開展仿真,考慮到機械手中存在部分不能運動的零件,因此進行運動仿真過程中需要對不能運動的零件進行簡化處理。組成各根手指的彈簧與硅膠套也屬于不可變形的零件,會對手指指節轉動過程造成制約,因此進行運動仿真時忽略這兩個零件,只保留各手指的指尖與指節結構,直接接觸抓取對象。對運動仿真機械手裝配結構進行保存,由此構建得到三維模型。機械手三維模型如圖1所示。

圖1 機械手三維模型
2.3 參數
構建運動仿真場景時,需要在裝配體文件中按照參數指標加入機械手與被抓取對象,同時繪制一個平面零件,作為托住抓取對象的基礎。仿真機械手為柔性結構,確保機械手所有關節都可以完成運動過程,然后將抓取對象設置于合適區域,形成固定平面后,等待機械手實施抓取操作。設置機械手運動特征,針對全局結構設置引力,控制方向朝下的狀態,并將引力數值設定為與重力一致。為抓取對象和平面設置實體接觸及線性阻尼,從而控制抓取對象在平面處保持靜止。進行運動仿真,得到機械手抓取的仿真結果。
機械手抓取運動模型如圖2所示。
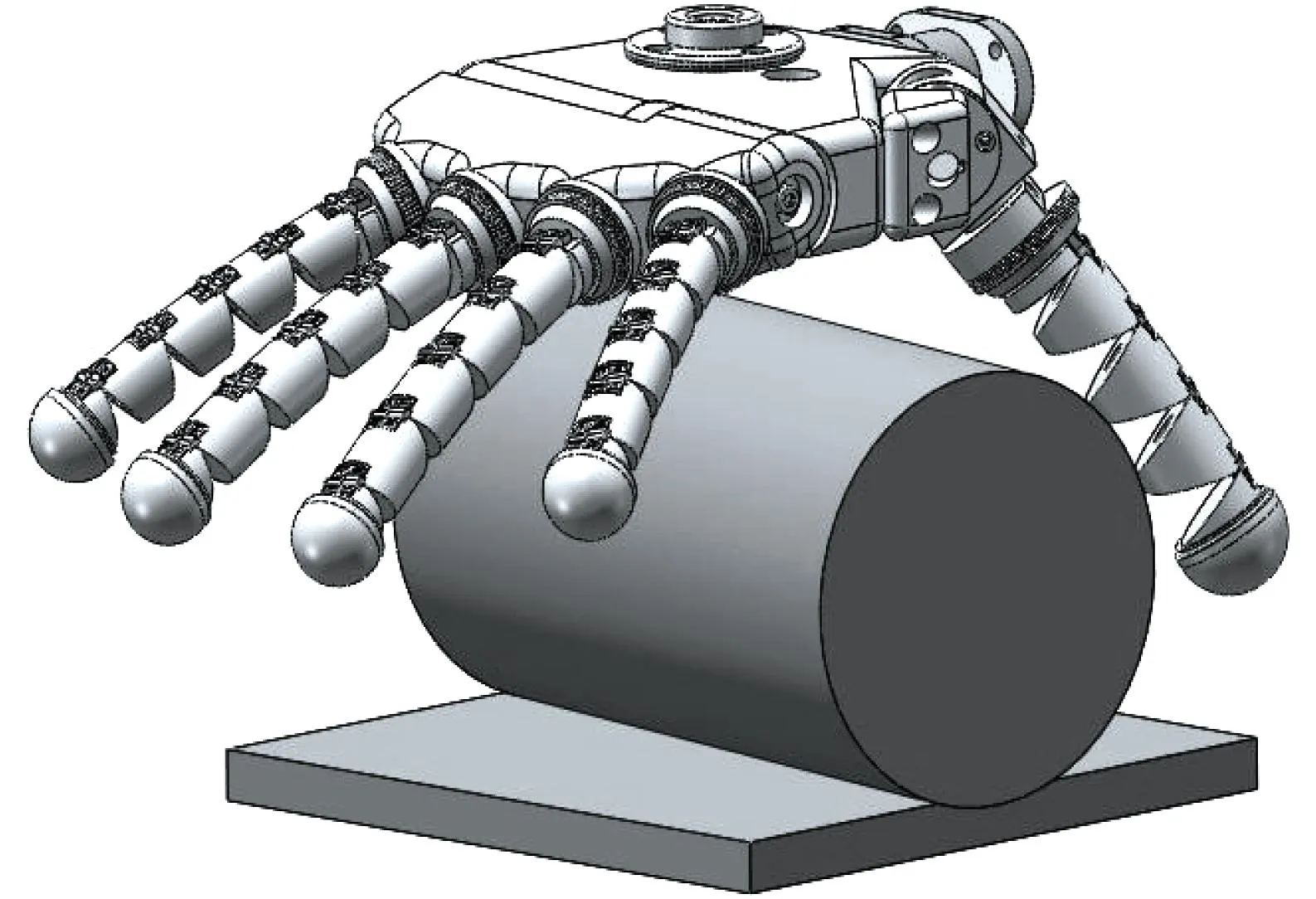
圖2 機械手抓取運動模型
在手指、大拇指根部與掌心的關節處安裝旋轉馬達,利用旋轉馬達動作來模擬手指在負壓下發生彎曲的狀態。保持旋轉馬達處于等速控制狀態,將速度設定在0.6~0.9 r/min之間。在模型中加入手指指節和抓取對象接觸組,確保手指與抓取對象發生接觸時不會造成穿透的問題,使手指能夠穩定地控制抓取對象。選擇鋁和鐵作為接觸材料,在保持10.2 mm/s速率的條件下,進行動態摩擦測試,設置摩擦因數為0.2。選擇恢復接觸的模式,設置恢復因數為0.2。
3 運動仿真分析結果
在仿真平臺配置參數后,進行柔性機械手抓取運動仿真。以位移作為結果分量,特征面包括指尖與指節側面,得到每根手指中各個關節對應的線性位移結果。
最終獲得五指指尖線性位移結果,如圖3所示。通過運動仿真分析,可以直觀觀察到機械手的運動過程,同時也能夠獲得各項參數指標。對五條指尖線性位移曲線進行分析,可以發現各手指都形成了平滑過渡的位移曲線,表明各指運動過程中都實現了平穩的運動速度。

圖3 指尖線性位移結果
隨著抓取的進行,各個手指的運動規律特征一致,均基本表現出單調減小的變化規律,可見均進行了抓取動作,并且各個手指的動作是同步進行的。
通過橫向對比五指指尖線性位移結果可以發現,中指指尖形成最大移動距離,之后為食指、無名指、小拇指指尖,移動距離最小的是大拇指指尖,這與實際手指對圓形物體的抓取特點一致。此外,所有手指都形成了相似的線性位移變化趨勢,表明各個粗細與長度不同的手指都保持相近的運動控制穩定性,可以判斷機械手達到了很高的穩定性。根據指尖位移曲線具有同樣的停止時間可以判斷,五個手指的接觸過程存在先后順序,先接觸手指控制抓取對象的移動,直至各個手指都與抓取對象保持接觸并達到穩定后,抓取狀態才發生停止。通過分析運動仿真結果,可以清晰觀察到機械手對物體進行抓取的控制過程。
在手指出口形成負壓后,氣體從手指內部抽出,此時手指內部形成低于外部大氣的壓力,表現為被大氣作用后形成擠壓狀態。同時各關節間發生相互轉動,形成更小的空腔體積,并與出口負壓保持平衡。硅橡膠外表與手指指節保持貼緊,再與指節共同發生變形,隨著手指不斷彎曲,與抓取對象間形成更短的距離[8]。
手指不同關節間保持連接狀態,構成手指主體結構。手指關節外部采用彈性硅橡膠作為包裹物。在硅橡膠和手指關節間設置密閉容腔,同時對手指指節開設圓孔,利用圓孔連接外部區域,再利用氣體壓入與抽出方式來調節手指的彎曲和伸直。
4 結束語
筆者開展柔性機械手抓取運動仿真分析,通過運動仿真,能夠非常直觀地觀察到機械手的運動過程,獲得各項參數指標。在抓取運動過程中,中指指尖形成了最大移動距離,之后為食指、無名指、小拇指指尖,移動距離最小的是大拇指指尖。