礦用履帶式鉆機(jī)的遠(yuǎn)程智能化監(jiān)控系統(tǒng)研究
2024-01-04 11:53:50周文宇
機(jī)械管理開(kāi)發(fā) 2023年11期
周文宇
(華晉焦煤有限責(zé)任公司沙曲二號(hào)煤礦, 山西 呂梁 033300)
0 引言
履帶式鉆機(jī)是煤礦井下進(jìn)行地質(zhì)勘探、瓦斯鉆孔的核心設(shè)備,其工作的穩(wěn)定性和可靠性對(duì)提升井下鉆進(jìn)效率具有十分重要的意義。目前多數(shù)履帶式鉆機(jī)的控制系統(tǒng)只能簡(jiǎn)單的顯示鉆進(jìn)速度、鉆進(jìn)深度等,不僅無(wú)法對(duì)鉆機(jī)的運(yùn)行狀態(tài)進(jìn)行監(jiān)測(cè),而且無(wú)法對(duì)故障點(diǎn)位和鉆場(chǎng)信息進(jìn)行監(jiān)測(cè),整個(gè)控制系統(tǒng)的反應(yīng)速度較慢、控制精度差,難以滿(mǎn)足井下高效、安全鉆進(jìn)的需求。
1 ZDY4500LFK 型鉆機(jī)結(jié)構(gòu)
ZDY4500LFK 型鉆機(jī)是一種廣泛應(yīng)用在煤礦井下的履帶式鉆機(jī)[1],主要包括了鉆車(chē)本體和泵車(chē)兩個(gè)部分,能夠用于進(jìn)行瓦斯抽采、礦井下探放水、井下地質(zhì)構(gòu)造鉆探等,同時(shí)也能夠用在井下高瓦斯區(qū)域的防突施工。其中鉆車(chē)部分包括了注漿、操控太、補(bǔ)桿裝置等,而泵車(chē)包括了車(chē)體、冷卻機(jī)構(gòu)、電機(jī)組等,該鉆機(jī)泵車(chē)和鉆車(chē)結(jié)構(gòu)如圖1 所示[2]。
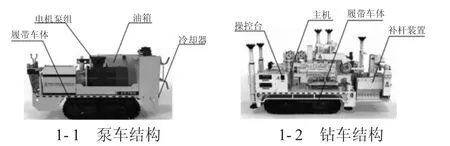
圖1 ZDY4500LFK 型鉆機(jī)結(jié)構(gòu)示意圖
2 鉆機(jī)遠(yuǎn)程監(jiān)測(cè)系統(tǒng)
為了滿(mǎn)足對(duì)鉆機(jī)工作時(shí)的全面監(jiān)測(cè)需求,文章介紹了一種新的鉆機(jī)自動(dòng)化監(jiān)測(cè)系統(tǒng),其主要包括了各類(lèi)傳感器組件、高清攝像機(jī)系統(tǒng)、控制器、網(wǎng)絡(luò)通信設(shè)備等,用于滿(mǎn)足對(duì)井下鉆進(jìn)環(huán)境和鉆機(jī)運(yùn)行狀態(tài)實(shí)時(shí)監(jiān)測(cè)和預(yù)警的需求,該鉆機(jī)遠(yuǎn)程監(jiān)測(cè)系統(tǒng)結(jié)構(gòu)如圖2所示[3]。

圖2 鉆機(jī)遠(yuǎn)程監(jiān)測(cè)系統(tǒng)示意圖
由圖2 可知,該鉆機(jī)遠(yuǎn)程監(jiān)測(cè)系統(tǒng)包括了傳感器組件、視頻監(jiān)測(cè)組件、數(shù)據(jù)通信系統(tǒng)和監(jiān)測(cè)服務(wù)單元。其中傳感器組件主要分布在鉆機(jī)的油缸、電機(jī)、執(zhí)行機(jī)構(gòu)處,用于對(duì)鉆機(jī)工作時(shí)的系統(tǒng)壓力、工作姿態(tài)、運(yùn)行狀態(tài)等進(jìn)行監(jiān)測(cè)。視頻監(jiān)測(cè)組件主要是安裝在鉆機(jī)周?chē)乃慕M攝像裝置,該攝像裝置能夠滿(mǎn)足井下高塵、高壓環(huán)境下對(duì)鉆機(jī)周?chē)h(huán)境監(jiān)測(cè)可靠性的需求。數(shù)據(jù)通信系統(tǒng)主要是以CAN 數(shù)據(jù)總線(xiàn)為基礎(chǔ)[4],能夠滿(mǎn)足在井下復(fù)雜地質(zhì)環(huán)境情況下的通信可靠性需求,監(jiān)測(cè)服務(wù)單元主要用于顯示鉆機(jī)工作時(shí)的鉆進(jìn)參數(shù)和運(yùn)行狀態(tài)參數(shù),當(dāng)出現(xiàn)異常時(shí)能第一時(shí)間預(yù)警并進(jìn)行故障定位,便于工作人員快速確認(rèn),提高鉆機(jī)運(yùn)行可靠性。
3 網(wǎng)絡(luò)通信系統(tǒng)
由于煤礦井下的地質(zhì)條件復(fù)雜,干擾因素多,因此數(shù)據(jù)在傳輸過(guò)程中受到的干擾大、數(shù)據(jù)傳輸效率低,為了滿(mǎn)足鉆機(jī)監(jiān)測(cè)時(shí)對(duì)視頻信息、各類(lèi)監(jiān)測(cè)傳感器信息快速、高效、精確的傳輸需求,文章提出了一種新的網(wǎng)絡(luò)拓?fù)浣Y(jié)構(gòu)[5]。
在控制器內(nèi)設(shè)置了一路本安以太網(wǎng)接口,然后通過(guò)高速光纖數(shù)據(jù)網(wǎng)絡(luò)與井下網(wǎng)關(guān)連接進(jìn)入到環(huán)網(wǎng)并進(jìn)行數(shù)據(jù)工況的傳輸,在攝像機(jī)上設(shè)置了4 組以太網(wǎng)接口和2 組以太網(wǎng)電口,系統(tǒng)中的四組視頻攝像裝置以串聯(lián)的形式接入到網(wǎng)關(guān)內(nèi)[6]。控制器采用了標(biāo)準(zhǔn)協(xié)議接口,能夠滿(mǎn)足多通道監(jiān)測(cè)和數(shù)據(jù)控制的需求,能夠同時(shí)容納CAN 數(shù)據(jù)總線(xiàn)、以太網(wǎng)、開(kāi)關(guān)量輸入接口控制等,能夠?qū)崿F(xiàn)對(duì)各類(lèi)傳感器和控制系統(tǒng)的靈活驅(qū)動(dòng),滿(mǎn)足控制信息傳輸靈活性的需求。該高速網(wǎng)絡(luò)通信系統(tǒng)結(jié)構(gòu)如圖3 所示[7]。
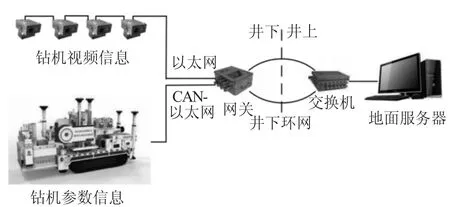
圖3 井下高速網(wǎng)絡(luò)通信系統(tǒng)結(jié)構(gòu)示意圖
4 監(jiān)測(cè)軟件系統(tǒng)
該監(jiān)測(cè)系統(tǒng)的核心是對(duì)鉆機(jī)的運(yùn)行狀態(tài)進(jìn)行實(shí)時(shí)監(jiān)測(cè),當(dāng)出現(xiàn)運(yùn)行異常時(shí)能夠及時(shí)進(jìn)行異常信息的定位和分析,幫助工作人員及時(shí)確定故障位置并進(jìn)行修復(fù)。根據(jù)鉆機(jī)運(yùn)行狀態(tài)監(jiān)測(cè)系統(tǒng)的控制模式[8],該軟件監(jiān)測(cè)系統(tǒng)主要包括了兩個(gè)部分,第一個(gè)部分是對(duì)鉆機(jī)的工況參數(shù)進(jìn)行監(jiān)測(cè),第二部分是對(duì)鉆機(jī)的運(yùn)行狀態(tài)進(jìn)行監(jiān)測(cè)。
對(duì)鉆機(jī)運(yùn)行工況參數(shù)的監(jiān)測(cè)主要是由傳感器信息監(jiān)測(cè)和按鍵狀態(tài)監(jiān)測(cè),能夠通過(guò)雙重監(jiān)控的模式,確保對(duì)鉆機(jī)運(yùn)行工況的監(jiān)測(cè)可靠性,該監(jiān)測(cè)軟件系統(tǒng)的控制邏輯如圖4 所示[9]。

圖4 鉆機(jī)監(jiān)測(cè)系統(tǒng)邏輯示意圖
5 應(yīng)用情況分析
目前該自動(dòng)控制系統(tǒng)已經(jīng)在ZDY4500LFK 型鉆機(jī)上投入應(yīng)用,并在煤礦井下進(jìn)行了實(shí)際使用,根據(jù)對(duì)優(yōu)化前后鉆機(jī)的使用情況對(duì)比,優(yōu)化后新控制系統(tǒng)下,實(shí)現(xiàn)了對(duì)履帶式鉆機(jī)工作過(guò)程的全面自動(dòng)化監(jiān)測(cè),而且在鉆進(jìn)是發(fā)出調(diào)控指令后系統(tǒng)的執(zhí)行反應(yīng)時(shí)間由最初的4.4 s 降低到了目前的0.99 s,反應(yīng)速度比優(yōu)化前提升了約77.4%,有效提升了鉆機(jī)在工作過(guò)程中的反應(yīng)靈敏性。
由于實(shí)現(xiàn)了鉆機(jī)在鉆進(jìn)過(guò)程中鉆機(jī)姿態(tài)、鉆機(jī)參數(shù)的全方位監(jiān)測(cè),因此當(dāng)出現(xiàn)偏差后系統(tǒng)會(huì)自動(dòng)對(duì)鉆機(jī)的鉆進(jìn)姿態(tài)和參數(shù)進(jìn)行調(diào)整,從而很大程度上能夠提升其運(yùn)行時(shí)的調(diào)整精度,根據(jù)實(shí)際驗(yàn)證,其鉆機(jī)時(shí)的調(diào)控精度由最初的±47.5 mm 提升到了目前的±17.8 mm,實(shí)際調(diào)控精度提升了約62.6%。鉆機(jī)在鉆進(jìn)過(guò)程中能夠進(jìn)行鉆進(jìn)狀態(tài)的實(shí)時(shí)監(jiān)測(cè)和分析,當(dāng)出現(xiàn)異常運(yùn)行參數(shù)時(shí)能夠自動(dòng)進(jìn)行識(shí)別和故障原因分析,并顯示在監(jiān)控界面上,便于工作人員能夠快速進(jìn)行故障排除和修復(fù),將運(yùn)行時(shí)的故障率降低了83.3%,有效提升了鉆進(jìn)控制系統(tǒng)的運(yùn)行可靠性和穩(wěn)定性。
6 結(jié)論
1)新的鉆機(jī)自動(dòng)化監(jiān)測(cè)系統(tǒng),包括了各類(lèi)傳感器組件、高清攝像機(jī)系統(tǒng)、控制器、網(wǎng)絡(luò)通信設(shè)備等,能夠滿(mǎn)足對(duì)井下鉆進(jìn)環(huán)境和鉆機(jī)運(yùn)行狀態(tài)實(shí)時(shí)監(jiān)測(cè)和預(yù)警的需求;
2)新的網(wǎng)絡(luò)通信系統(tǒng)設(shè)置了一路本安以太網(wǎng)接口,然后通過(guò)高速光纖數(shù)據(jù)網(wǎng)絡(luò)與井下網(wǎng)關(guān)連接進(jìn)入到環(huán)網(wǎng)并進(jìn)行數(shù)據(jù)工況的傳輸,滿(mǎn)足了數(shù)據(jù)高速傳輸需求;
3)新的控制系統(tǒng)能夠?qū)⒄{(diào)控反應(yīng)速度提升77.4%,將調(diào)控精度提升62.6%,將運(yùn)行故障降低83.3%。
猜你喜歡
工業(yè)設(shè)計(jì)(2022年8期)2022-09-09 07:43:20
艦船科學(xué)技術(shù)(2022年6期)2022-04-19 11:02:04
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測(cè)繪(2020年12期)2020-12-29 01:33:58
汽車(chē)維修與保養(yǎng)(2019年7期)2020-01-06 03:30:42
電子制作(2019年15期)2019-08-27 01:11:48
通信電源技術(shù)(2018年3期)2018-06-26 06:33:46
電子制作(2017年17期)2017-12-18 06:41:06
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
汽車(chē)維護(hù)與修理(2016年10期)2016-07-10 08:17:41
