無人駕駛拖拉機(jī)田間耕整地作業(yè)測(cè)試
2024-01-03 03:32:32周遵喜林立杰
農(nóng)業(yè)開發(fā)與裝備 2023年11期
周遵喜,林立杰
(上海市農(nóng)業(yè)機(jī)械鑒定推廣站,上海市 201601)
0 引言
隨著物聯(lián)網(wǎng)、大數(shù)據(jù)、人工智能等新一代信息技術(shù)的快速發(fā)展,在實(shí)現(xiàn)水稻全程機(jī)械化的基礎(chǔ)上,發(fā)展無人化農(nóng)機(jī)裝備、建設(shè)糧食生產(chǎn)無人農(nóng)場(chǎng)是上海近幾年在智能農(nóng)機(jī)領(lǐng)域出現(xiàn)的新需求和新嘗試。而在水稻無人農(nóng)場(chǎng)多項(xiàng)作業(yè)環(huán)節(jié)中,農(nóng)機(jī)無人駕駛技術(shù)則是最重要的技術(shù)之一,它可以應(yīng)用到各類農(nóng)機(jī)裝備上實(shí)現(xiàn)無人駕駛耕整地、播種或插秧、植保、收割等作業(yè)。
1 無人駕駛的原理與概念
目前,農(nóng)機(jī)無人駕駛系統(tǒng)主要以高精度北斗衛(wèi)星定位技術(shù)為基礎(chǔ),利用智能控制技術(shù)、智能路徑規(guī)劃技術(shù)、地理信息技術(shù)(GIS)等技術(shù),以實(shí)現(xiàn)農(nóng)機(jī)裝備自動(dòng)規(guī)劃作業(yè)路徑、自動(dòng)控制行走速度和轉(zhuǎn)向、自動(dòng)調(diào)整三點(diǎn)懸掛等一系列自動(dòng)化功能,并配有自動(dòng)避障、自動(dòng)停車等安全功能,遠(yuǎn)程控制農(nóng)機(jī)裝備下達(dá)操作指令作業(yè),最終實(shí)現(xiàn)農(nóng)機(jī)田間作業(yè)無人化。
無人駕駛系統(tǒng)的作用是使農(nóng)機(jī)裝備按照優(yōu)化的作業(yè)路徑工作,減少重復(fù)作業(yè)區(qū)和遺漏作業(yè)區(qū)的面積,提高農(nóng)機(jī)田間作業(yè)質(zhì)量和降低操作人員勞動(dòng)強(qiáng)度,使駕駛員從單調(diào)重復(fù)、高強(qiáng)度的勞動(dòng)中解放出來,在未來5~10年甚至更長(zhǎng)的時(shí)間里,當(dāng)勞動(dòng)力緊缺矛盾更加突出時(shí),無人駕駛系統(tǒng)的優(yōu)勢(shì)會(huì)更加明顯。
目前,上海無人駕駛拖拉機(jī)主要是在現(xiàn)有的拖拉機(jī)上加裝無人駕駛系統(tǒng)進(jìn)行電控化無人化改造,拖拉機(jī)上的無人駕駛系統(tǒng)主要由北斗接收天線、車載終端、驅(qū)動(dòng)一體化電機(jī)、角度傳感器、無人控制器等部件組成,可實(shí)現(xiàn)的功能主要有作業(yè)過程無人化、云端車輛控制、作業(yè)路徑自動(dòng)規(guī)劃等,最終由拖拉機(jī)懸掛農(nóng)機(jī)具實(shí)現(xiàn)耕整地的無人化作業(yè)。
2 無人駕駛拖拉機(jī)田間耕整地作業(yè)測(cè)試
2.1 測(cè)試概況
測(cè)試時(shí)間與地點(diǎn):2022年3月3~4日;上海市嘉定區(qū)外岡鎮(zhèn)高標(biāo)準(zhǔn)良田。
測(cè)試農(nóng)機(jī)具:愛科麥賽福格森S1204-C拖拉機(jī)(加裝聯(lián)適導(dǎo)航無人駕駛系統(tǒng)),漢美1GKN-230型中間傳動(dòng)式旋耕機(jī),漢美1LYQ-1230驅(qū)動(dòng)圓盤犁(工作幅寬2.7 m)。
旋耕田塊情況:長(zhǎng)寬為320 m×46.4 m,面積1.48 hm2。
犁耕田塊情況:長(zhǎng)寬為320 m×38.7 m,面積1.24 hm2。
2.2 測(cè)試內(nèi)容
無人駕駛拖拉機(jī)犁耕和旋耕作業(yè)效率、作業(yè)質(zhì)量、無人化率、作業(yè)故障等。
2.3 測(cè)試方法和儀器
使用秒表分段記錄無人駕駛拖拉機(jī)作業(yè)時(shí)直線行駛時(shí)間、轉(zhuǎn)彎行駛時(shí)間、故障時(shí)間等;使用皮尺測(cè)量無人駕駛拖拉機(jī)犁耕和旋耕作業(yè)面積和漏耕區(qū)域面積;使用鋼尺測(cè)量耕深。
2.4 測(cè)試結(jié)果
本次無人駕駛拖拉機(jī)犁耕和旋耕作業(yè)前田間實(shí)地定位打點(diǎn)時(shí)間、路徑規(guī)劃時(shí)間、無人駕駛系統(tǒng)調(diào)試時(shí)間均較短,不計(jì)入本次田間作業(yè)測(cè)試總時(shí)間內(nèi)。
2.4.1 旋耕作業(yè)
無人化率方面:在實(shí)際無人駕駛拖拉機(jī)旋耕作業(yè)過程中,田塊四周需要留空不作業(yè),測(cè)試時(shí)左側(cè)留空2.5 m,右側(cè)留空1 m,上方留空7 m,下方留空15.3 m。實(shí)際作業(yè)田塊尺寸為42.9 m×297.7 m,實(shí)際作業(yè)面積1.28 hm2,其他區(qū)域需要人工駕駛作業(yè),無人化率為86%(圖1)。
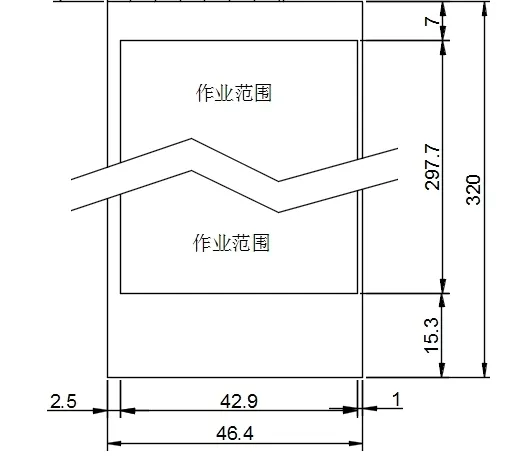
圖1 無人駕駛拖拉機(jī)旋耕作業(yè)無人作業(yè)區(qū)域
作業(yè)效率方面:無人駕駛拖拉機(jī)旋耕作業(yè)全程用時(shí)7 215 s,全程作業(yè)效率為6 373.33 m2/h,剔除故障時(shí)間1 243 s,有效作業(yè)效率為7 706.67 m2/h,與常規(guī)人工駕駛拖拉機(jī)旋耕作業(yè)6 666.67~10 000 m2/h基本持平,直線平均行走速度1.2 m/s也與人工駕駛速度基本一致(表1)。
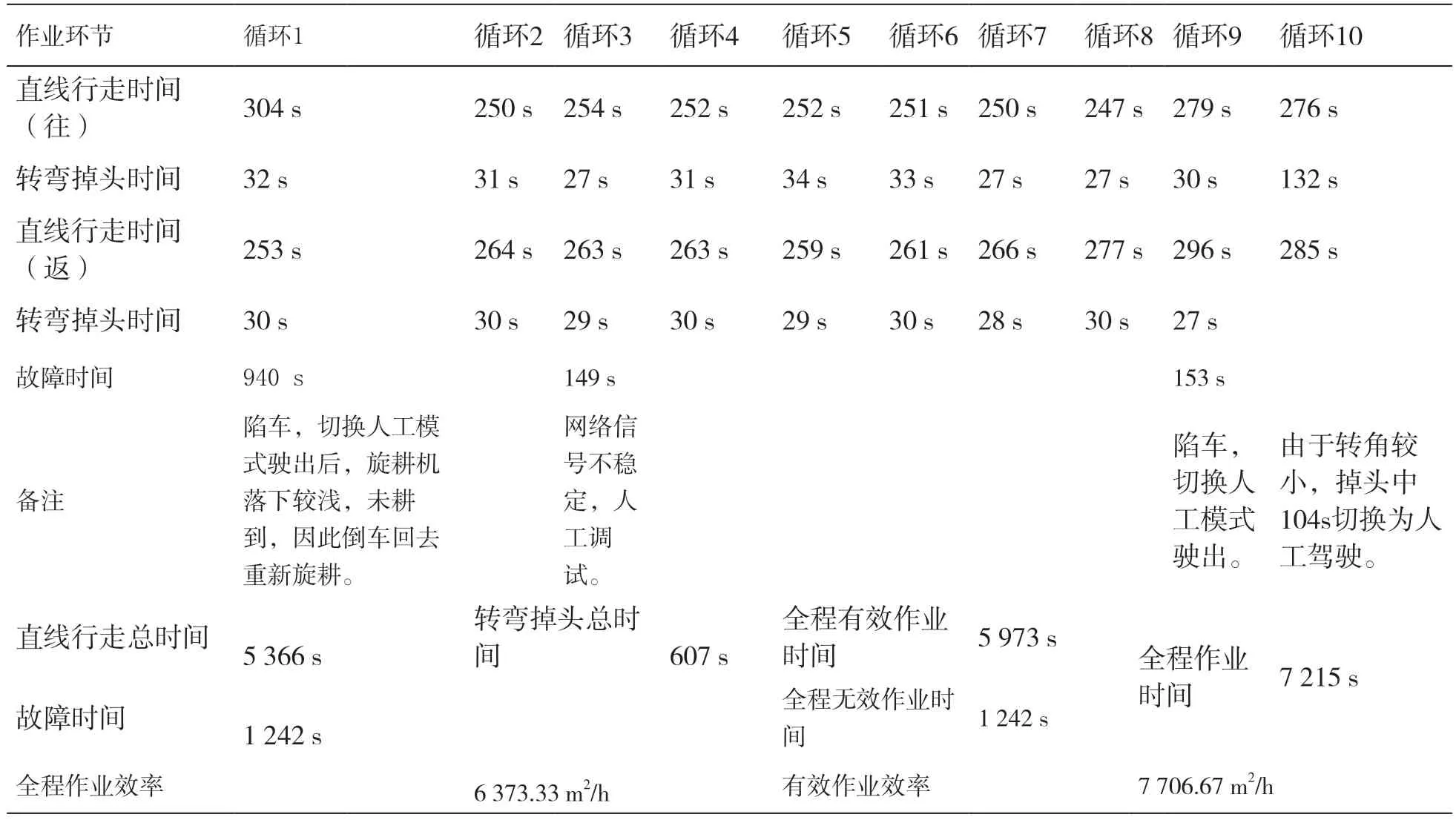
表1 無人駕駛拖拉機(jī)旋耕作業(yè)時(shí)間分布表
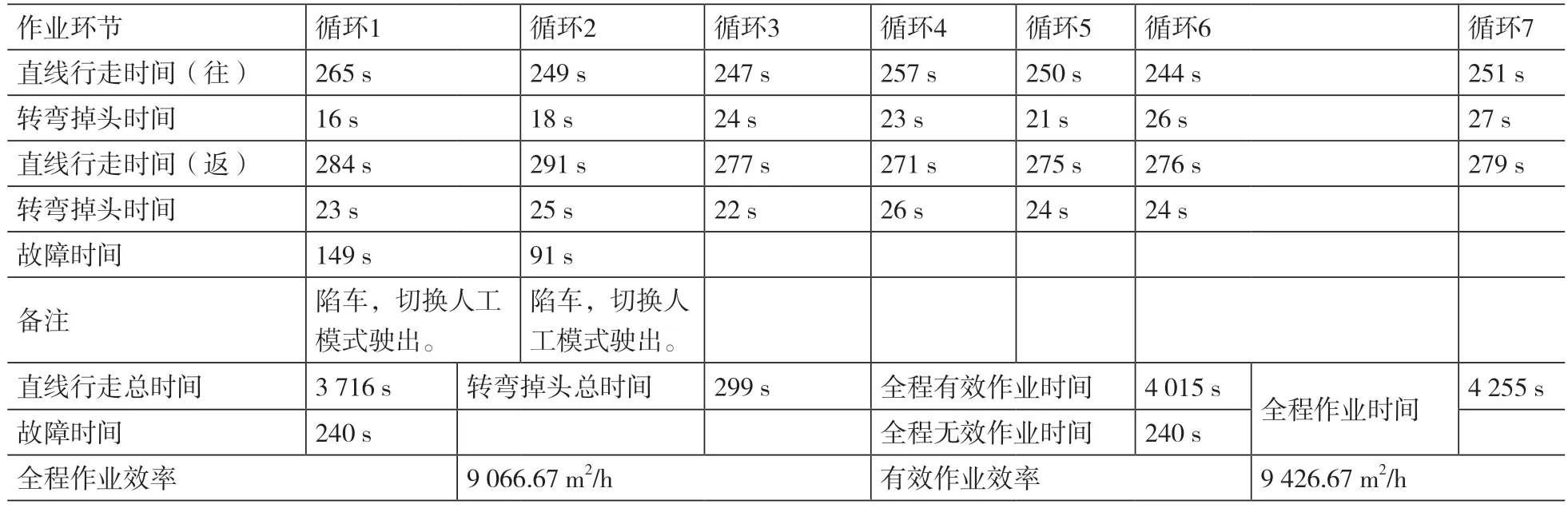
表2 無人駕駛拖拉機(jī)犁耕作業(yè)時(shí)間分布表
作業(yè)故障方面:目前無人駕駛技術(shù)成熟度還不夠高,受田塊干濕環(huán)境影響,出現(xiàn)陷車、信號(hào)不穩(wěn)定導(dǎo)致作業(yè)中斷,需要人工進(jìn)行調(diào)試解決,故障時(shí)間1 243 s,本次作業(yè)測(cè)試故障時(shí)間占全程用時(shí)比例高達(dá)17.21%。
作業(yè)質(zhì)量方面:經(jīng)多處測(cè)量,田間旋耕平均深度為13.4 cm,未發(fā)現(xiàn)漏耕和重耕情形。
2.4.2 犁耕作業(yè)
無人化率方面:在實(shí)際無人駕駛拖拉機(jī)犁耕作業(yè)過程中,田塊四周需要留空不作業(yè),測(cè)試時(shí)左側(cè)留空2 m,右側(cè)留空1 m,上方留空7 m,下方留空12.5 m。實(shí)際作業(yè)田塊尺寸為35.7 m×300.5 m,實(shí)際作業(yè)面積1.07 hm2,其他區(qū)域需要人工駕駛作業(yè),無人化率為86.6%(圖2)。
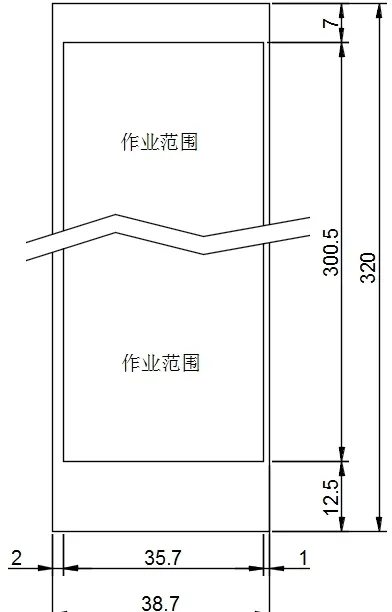
圖2 無人駕駛拖拉機(jī)犁耕作業(yè)無人作業(yè)區(qū)域
作業(yè)效率方面:無人駕駛拖拉機(jī)犁耕作業(yè)全程用時(shí)4 225 s,全程作業(yè)效率為9 066.67 m2/h,剔除故障時(shí)間240 s,有效作業(yè)效率為9 426.67 m2/h,與常規(guī)人工駕駛拖拉機(jī)犁耕作業(yè)6 666.67~10 000 m2/h基本持平,直線平均行走速度1.2 m/s,也與人工駕駛速度基本一致。
作業(yè)故障方面:經(jīng)過無人駕駛拖拉機(jī)旋耕作業(yè)后,相關(guān)技術(shù)人員進(jìn)行系統(tǒng)調(diào)整,疊加作業(yè)田塊作業(yè)環(huán)境較好,故障時(shí)間下降至240 s,本次作業(yè)測(cè)試故障時(shí)間占全程用時(shí)比例為5.64%。
作業(yè)質(zhì)量方面:經(jīng)多處測(cè)量,田間犁耕平均深度為20.1 cm,未發(fā)現(xiàn)漏耕和重耕情形。
3 結(jié)論
目前,該套無人駕駛系統(tǒng)應(yīng)用到拖拉機(jī)上犁耕和旋耕作業(yè)已基本成熟,單一田塊全程無人駕駛作業(yè)面積可達(dá)85%以上,其作業(yè)效率與人工駕駛作業(yè)差別不大,作業(yè)質(zhì)量基本滿足上海水稻生產(chǎn)耕整地要求,但無人駕駛拖拉機(jī)今后在本市糧食生產(chǎn)無人農(nóng)場(chǎng)建設(shè)中仍然需要進(jìn)一步試驗(yàn)示范,相關(guān)企業(yè)還需做好技術(shù)優(yōu)化改進(jìn)和培訓(xùn)工作。
加強(qiáng)無人駕駛系統(tǒng)與本市主流品牌的多種型號(hào)拖拉機(jī)組合情況下的作業(yè)測(cè)試,尤其是懸掛不同農(nóng)機(jī)具在不同土壤環(huán)境下的實(shí)地作業(yè)測(cè)試,以便于更好地對(duì)無人駕駛系統(tǒng)進(jìn)一步優(yōu)化改進(jìn),使無人駕駛系統(tǒng)在水稻田實(shí)際機(jī)械作業(yè)中更加成熟,相關(guān)優(yōu)勢(shì)更加明顯。
目前,拖拉機(jī)的無人駕駛系統(tǒng)操控仍僅限企業(yè)研發(fā)人員,且專業(yè)性要求極高,傳統(tǒng)的農(nóng)機(jī)操作人員一時(shí)難以單獨(dú)操作,急需無人駕駛系統(tǒng)標(biāo)準(zhǔn)化、系列化后加大培訓(xùn)力度,否則會(huì)在一定程度上制約無人駕駛拖拉機(jī)耕整地的進(jìn)一步示范推廣。
猜你喜歡
工業(yè)設(shè)計(jì)(2022年8期)2022-09-09 07:43:20
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測(cè)繪(2020年12期)2020-12-29 01:33:58
少年博覽·初中版(2020年6期)2020-06-12 11:42:23
汽車維修與保養(yǎng)(2019年7期)2020-01-06 03:30:42
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
故事大王(2016年7期)2016-09-22 17:30:08
汽車維護(hù)與修理(2016年10期)2016-07-10 08:17:41
汽車維修與保養(yǎng)(2015年6期)2015-04-17 03:31:50
汽車維護(hù)與修理(2015年2期)2015-02-28 12:15:39
