基于自適應(yīng)特征融合的無人機(jī)小目標(biāo)檢測算法
2024-01-02 00:00:00趙濱淋陳功李勝
摘 要: 本文提出了一種針對無人機(jī)捕獲圖像的目標(biāo)檢測算法,旨在解決無人機(jī)視角下小目標(biāo)檢測存在漏檢現(xiàn)象嚴(yán)重、檢測精度低的問題。主要改進(jìn)包括重新設(shè)計聚類算法生成更準(zhǔn)確的先驗(yàn)框,引入自適應(yīng)特征融合模塊以使模型更靈活地學(xué)習(xí)上下文特征信息,更改檢測頭在較大的特征層上進(jìn)行目標(biāo)檢測并解耦分類和回歸任務(wù)。通過在VisDrone2019 數(shù)據(jù)集上進(jìn)行廣泛實(shí)驗(yàn),改進(jìn)后的YOLOv5s 模型相較于基準(zhǔn)模型在mAP50 上提高了5.8%,并且保持了較高的幀率(67 FPS)。實(shí)驗(yàn)結(jié)果表明該改進(jìn)方法能夠顯著提高模型的檢測性能,使其適用于復(fù)雜的無人機(jī)捕獲場景。
關(guān)鍵詞: 小目標(biāo)檢測;檢測頭;特征融合;聚類算法
中圖法分類號: TP391.4 文獻(xiàn)標(biāo)識碼: A 文章編號: 1000-2324(2024)06-0814-12
隨著無人機(jī)技術(shù)的發(fā)展,無人機(jī)視角下的目標(biāo)檢測在軍事、安防、農(nóng)業(yè)、環(huán)境檢測、自動駕駛、災(zāi)害響應(yīng)等領(lǐng)域具有廣泛的應(yīng)用,所以研究無人機(jī)視角下的目標(biāo)檢測技術(shù)具有極大的應(yīng)用價值。在計算機(jī)視覺領(lǐng)域,目標(biāo)檢測一般分為傳統(tǒng)目標(biāo)檢測和基于深度學(xué)習(xí)的目標(biāo)檢測。傳統(tǒng)的目標(biāo)檢測的算法主要有Hough Forest[1]、BoostedCascade of Simple Features[2]、Template MatchingTechniques[3]等方法。這些方法在被提出時是非常有影響力的,但是這些方法具有對光照和視角變化敏感、難以處理遮擋、不適應(yīng)復(fù)雜背景、手工設(shè)計特征的限制以及不支持端到端學(xué)習(xí)等劣勢,這些劣勢導(dǎo)致了深度學(xué)習(xí)方法的興起。深度學(xué)習(xí)方法通過卷積神經(jīng)網(wǎng)絡(luò)(CNN)自動學(xué)習(xí)特征,并在端到端的框架中優(yōu)化整個目標(biāo)檢測系統(tǒng)。如今深度學(xué)習(xí)方法在目標(biāo)檢測領(lǐng)域取得了顯著的進(jìn)展,特別是在處理復(fù)雜場景和大規(guī)模數(shù)據(jù)時具有明顯的優(yōu)勢,所以基于深度學(xué)習(xí)的目標(biāo)檢測方法逐漸取代了傳統(tǒng)方法,取得了更好的性能。
基于深度學(xué)習(xí)的目標(biāo)檢測技術(shù)主要分為兩種。一種是先生成候選框,再對這些候選框進(jìn)行分類和回歸的兩階段目標(biāo)檢測算法,主要以RCNN[4]、Faster-RCN[5]為代表。另外一種是通過單個前向傳播過程直接完成目標(biāo)的分類和位置回歸的單階段目標(biāo)檢測算法,主要以YOLO系列算法[6-9]、SSD[10]、RetinaNet[11]為代表。隨著對深度學(xué)習(xí)方法的深入研究,基于深度卷積神經(jīng)網(wǎng)絡(luò)的目標(biāo)檢測算法基本上可以滿足各場景需求,但是大多數(shù)的目標(biāo)檢測算法是為自然場景圖像設(shè)計的,如果直接應(yīng)用以前的目標(biāo)檢測模型來解決無人機(jī)視角下的目標(biāo)檢測主要存在問題如下:(1)無人機(jī)飛行高度變化大,所以目標(biāo)尺度變化不一,拍攝圖像中的物體尺寸各異。(2)無人機(jī)拍攝的圖像小、物體多、密度大。(3)物體之間存在重疊,難以捕獲正確目標(biāo)。(4)無人機(jī)拍攝的圖像由于覆蓋面積大,包含豐富的地理元素,所以系統(tǒng)很難進(jìn)行區(qū)分。以上問題使得無人機(jī)視角下的小目標(biāo)檢測具有極大的挑戰(zhàn)性。周華平等人[12]在YOLOv5 基礎(chǔ)上引入通道注意力,提升了對小目標(biāo)的檢測效果。齊向明等人[13]針對小目標(biāo)圖像檢測中存在相互遮擋、背景復(fù)雜和特征點(diǎn)少的問題,基于YOLOv7 提出一種重構(gòu)SPPCSPC 與優(yōu)化下采樣的小目標(biāo)檢測算法,但是在輕量化方面還需要有所改進(jìn)。Zhu 等人[14]提出了TPH-YOLOv5,通過在YOLOv5 中添加了一個預(yù)測頭,并在頭部應(yīng)用了Transformer 編碼器塊以形成Transformer檢測頭,提高了無人機(jī)圖像中高密度遮擋小物體的檢測,但是極大的提高了計算量。Liu 等人[15]提出SEC2F,提升網(wǎng)絡(luò)對小目標(biāo)的敏感性,以及提出改進(jìn)空間金字塔池化層以提高目標(biāo)檢測的準(zhǔn)確率,但是檢測效果并不是很好。Xu 等人[16]在骨干網(wǎng)絡(luò)中引入可變形卷積,從而在不同感受野提取特征,同時利用上下文特征提高了小目標(biāo)的檢測精度。考慮到實(shí)時性,谷歌采用深度可分離卷積替換傳統(tǒng)卷積,提出了MobileNet[17]骨干網(wǎng)絡(luò),大幅度降低了計算量,從而使模型能夠部署在邊緣設(shè)備上。
研究無人機(jī)下的小目標(biāo)檢測對農(nóng)業(yè)有望提供更全面、準(zhǔn)確的信息,幫助農(nóng)業(yè)實(shí)現(xiàn)智能化、高效化管理,提高產(chǎn)量和質(zhì)量,降低生產(chǎn)成本,對農(nóng)業(yè)可持續(xù)發(fā)展具有積極的推動作用。結(jié)合無人機(jī)拍攝圖像的特點(diǎn)以及考慮到單階段目標(biāo)檢測的優(yōu)點(diǎn),本文采用YOLOv5s 算法作為基準(zhǔn)算法,改進(jìn)該算法用于解決無人機(jī)視角下的小目標(biāo)檢測存在的漏檢和誤檢問題。主要工作如下:改進(jìn)K-means 聚類算法中的距離度量,使用IOU作為距離度量。使用重構(gòu)的C2F 模塊替換原有的C3模塊,加強(qiáng)對小目標(biāo)的識別能力。更換檢測頭,在較大的特征層上進(jìn)行檢測,使更多小目標(biāo)能被檢測到。將檢測頭進(jìn)行解耦,采用兩個分支進(jìn)行分類和回歸,使網(wǎng)絡(luò)能夠進(jìn)行差異性學(xué)習(xí)。
1 YOLOv5s 基準(zhǔn)算法
YOLO目標(biāo)檢測算法是全卷積的單階段目標(biāo)檢測算法,YOLOv5s 相對較小的模型設(shè)計使得它在實(shí)時目標(biāo)檢測方面表現(xiàn)優(yōu)異。這對于需要低延遲響應(yīng)的應(yīng)用,如自動駕駛、實(shí)時監(jiān)控等領(lǐng)域非常重要。所以YOLOv5s 非常適合用于無人機(jī)視角下的目標(biāo)檢測。
YOLOv5s 主要由Backbone、Neck、Head 三部分組成。其中Backbone 由Conv 模塊和C3 模塊構(gòu)成,負(fù)責(zé)從輸入圖像中提取特征。作用是逐漸降低圖像分辨率,同時增加特征圖的深度,以在不同層次上捕獲圖像的語義信息。這些特征圖將被傳遞給后續(xù)Neck 和Head。在YOLOv5中,Neck 部分采用了PANet(Path AggregationNetwork)結(jié)構(gòu),該結(jié)構(gòu)通過橫向連接和信息傳遞來實(shí)現(xiàn)多尺度特征融合,從而實(shí)現(xiàn)不同層的特征圖進(jìn)行上下文信息融合。有助于提高模型對不同尺寸目標(biāo)的檢測能力。Head 通過1×1 的卷積進(jìn)行通道數(shù)的調(diào)整,從而完成目標(biāo)分類和目標(biāo)位置回歸。
2 改進(jìn)YOLOv5s
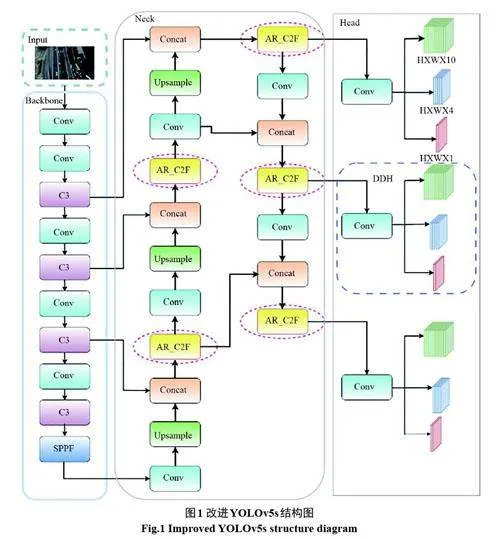
針對無人機(jī)視角下的小目標(biāo)檢測存在的難點(diǎn),考慮到檢測精度以及檢測速度,對YOLOV5s算法進(jìn)行改進(jìn)。首先,改進(jìn)K-means 聚類算法,使生成的錨框更加適合小目標(biāo),同時為了保留更多的小目標(biāo)特征信息,設(shè)置輸入網(wǎng)絡(luò)的圖片尺寸為960×960,并且把個別檢測頭更改為適合小目標(biāo)的檢測頭。其次,使用自適應(yīng)的上下文特征融合模塊,使網(wǎng)絡(luò)自適應(yīng)自融合的整合上下文信息,幫助模型進(jìn)行檢測。最后,對檢測頭解耦為兩個分支,使兩個分支分別做目標(biāo)分類和邊界框回歸,提高目標(biāo)分類準(zhǔn)確率和邊界框回歸的精度,從而增強(qiáng)網(wǎng)絡(luò)對小目標(biāo)的捕獲能力。本文的總體架構(gòu)如圖1所示。
2.1 改進(jìn)K-Means聚類算法
YOLOv5s 是一種基于先驗(yàn)框的單階段檢測算法,如果網(wǎng)絡(luò)一開始選擇了合適的先驗(yàn)框,那么神經(jīng)網(wǎng)絡(luò)更容易去學(xué)習(xí)特征,得到較好的檢測模型。K-Means 是一種經(jīng)典且有效的聚類方法,通過計算樣本之間的相似程度將較近的樣本聚為同一簇。在使用K-Means 聚類生成anchors時,如何衡量兩個樣本之間的相似性對聚類效果相當(dāng)重要。YOLOv5s 采用K-Means 聚類算法加上遺傳算法,使用歐式距離作為衡量樣本之間的相似性。首先,該算法隨機(jī)生成K個點(diǎn)作為初始聚類中心,將每個數(shù)據(jù)點(diǎn)分配到最近的聚類中心。然后,根據(jù)數(shù)據(jù)點(diǎn)重新計算聚類中心的位置。最后,重復(fù)上述步驟直至收斂。但是使用歐式距離衡量樣本之間的相似性對離群值敏感,可能會導(dǎo)致一些離群值對聚類結(jié)果產(chǎn)生較大影響。對于尺度差異較大的邊界框,因?yàn)槌叨容^小的樣本框在歐式距離計算中受到較大的懲罰。可能會導(dǎo)致對小目標(biāo)的樣本框聚類效果不佳。
IOU(boxes, anchors)[18,19]是目標(biāo)檢測中常用的評價指標(biāo),它度量了兩個邊界框的重疊程度,所以本文采用IOU作為衡量樣本的相似性。IOU相對于絕對坐標(biāo)更加具有魯棒性,有助于克服使用歐式距離時可能出現(xiàn)的尺度差異問題,能夠更好地抵抗尺度變換。使用IOU 作為距離度量也可以更好地考慮目標(biāo)框之間的重疊情況,這對于物體檢測任務(wù)中存在物體重疊的情況非常重要。盡管GIOU、DIOU等一系列IOU變形考慮了邊界框形狀和中心距離,可能在某些情況下優(yōu)于IOU。考慮到其計算效率和計算復(fù)雜度,本文選擇IOU作為改進(jìn)K-Means聚類算法的距離度量標(biāo)準(zhǔn)。
算法具體實(shí)現(xiàn):(1)在所有的boxes 中隨機(jī)挑選K個boxes作為簇中心。(2)計算每個boxes離這K個boxes 的距離(1-IOU)。(3)把每個boxes 分配到離K個簇中心中距離最小的那個簇。(4)根據(jù)每個簇中的boxes重新計算簇中心。(5)重復(fù)(3)、(4)直到每個簇中的元素不再發(fā)生變化。
2.2 自適應(yīng)特征融合模塊
無人機(jī)拍攝的圖像由于覆蓋面積大,包含地理元素,所以圖像背景復(fù)雜,目標(biāo)尺度較小。所以在網(wǎng)絡(luò)模型中引入注意力機(jī)制是一種常見的方法,可以幫助模型更加集中地關(guān)注圖像中的重要區(qū)域,從而提高檢測性能。注意力機(jī)制通過對不同空間位置或通道的信息賦予不同的權(quán)重,使網(wǎng)絡(luò)能夠更自適應(yīng)的關(guān)注與任務(wù)相關(guān)的區(qū)域特征。通道注意力機(jī)制更加關(guān)注對當(dāng)前任務(wù)有用的通道,有助于網(wǎng)絡(luò)更好地理解通道之間的關(guān)系。空間注意力機(jī)制能夠更集中地關(guān)注對當(dāng)前任務(wù)有用的區(qū)域,有助于模型更好地理解圖像的空間結(jié)構(gòu)。
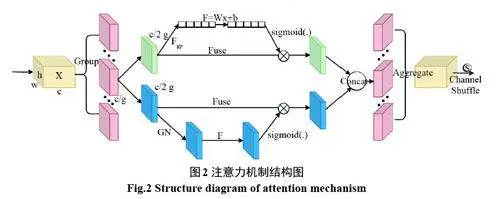
同時使用這兩種注意力機(jī)制,能更全面地捕獲圖像特征,能達(dá)到更好的效果,但無疑也增大了計算量。而Shuffle Attention[20]結(jié)合了這兩種注意力機(jī)制,使用多分支結(jié)構(gòu),并且使用組卷積降低了計算量。Shuffle Attention 使得網(wǎng)絡(luò)自適應(yīng)的整合了局部特征及其全局依賴關(guān)系。其結(jié)構(gòu)圖如圖2 所示,首先將輸入的特征圖劃分為g個組,把每個組中的特征圖沿通道維度分為兩個分支,一個分支使用通道注意力機(jī)制,另一個分支使用空間注意力機(jī)制。然后把兩個分支進(jìn)行拼接,將組內(nèi)的信息進(jìn)行融合。最后使用Channel Shuffle 操作對特征組進(jìn)行重排,從而使組間信息沿通道維度流動。
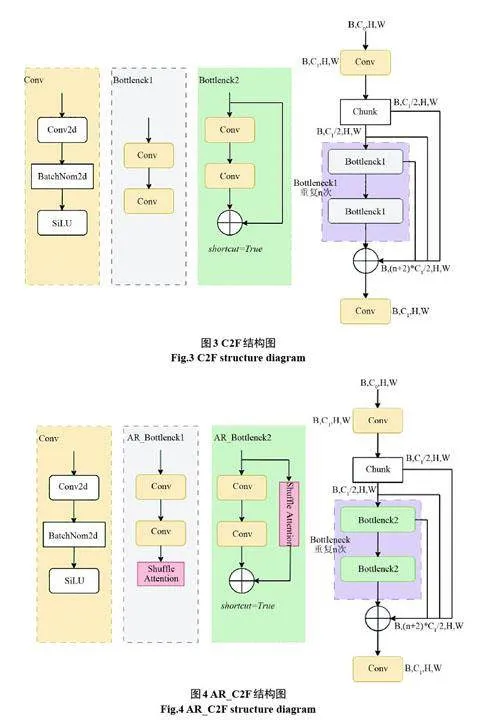
C2F 模塊是在C3 模塊基礎(chǔ)上改進(jìn)的,上層特征圖經(jīng)過一個卷積后,在通道維度上分為兩個分支,一個分支經(jīng)過n 個Bottleneck block 所得到的輸出直接與另一個分支進(jìn)行拼接。其結(jié)構(gòu)圖如圖3 所示。在C2F 模塊中的Bottlenck 中加入Shuffle Attention 注意力機(jī)制把C2F 重構(gòu)為AR_C2F 模塊,如圖4 所示。這樣不僅能提供更豐富的梯度信息還能保證模型更加輕量化,同時還能使得模型自適應(yīng)的整合了局部特征及其全局依賴關(guān)系,從而有助于提高模型的查全率以及準(zhǔn)確率。
2.3 更換檢測頭
由于無人機(jī)視角下的目標(biāo)大多數(shù)是小目標(biāo),所以本文更換檢測頭(Change detection head),使得訓(xùn)練出的模型更加適合小目標(biāo)檢測。
更大的特征圖通常也意味著減少了對圖像的下采樣次數(shù),有助于保留更多的細(xì)節(jié)信息,這樣模型能更好地捕獲目標(biāo)的細(xì)節(jié)信息,這對于小目標(biāo)而言尤其重要,因?yàn)樾∧繕?biāo)的細(xì)節(jié)信息可能決定了它們的類別和位置。在更大的特征圖上進(jìn)行位置回歸,尤其是在目標(biāo)尺寸較小時,模型更有可能準(zhǔn)確定位目標(biāo)的邊界框,這樣有助于提高目標(biāo)檢測的準(zhǔn)確性。采用更大的特征圖也可以降低誤檢率,降低將背景誤認(rèn)為目標(biāo)的可能性。而且在密集場景中,目標(biāo)可能相互靠近,更大的特征圖也能使模型更容易分辨和定位這些密集的小目標(biāo),提升了模型的魯棒性。
2.4 混合解耦檢測頭
YOLOv5 的檢測頭原本是一個耦合頭,借助一個1×1 的卷積調(diào)整通道數(shù),目標(biāo)分類和位置回歸兩個任務(wù)耦合在一起進(jìn)行。但是在目標(biāo)檢測任務(wù)中,分類和回歸任務(wù)的難度是不盡相同的,分類任務(wù)常常會受到類別不均衡或者某些類別難以區(qū)分的樣本的影響,耦合頭這種設(shè)計可能會導(dǎo)致兩個任務(wù)互相干擾。耦合頭難以區(qū)分分類和回歸任務(wù)的優(yōu)先級,在一些情況下,對于某些目標(biāo),可能位置回歸更為重要,而在其他情況下,目標(biāo)分類可能更為重要。
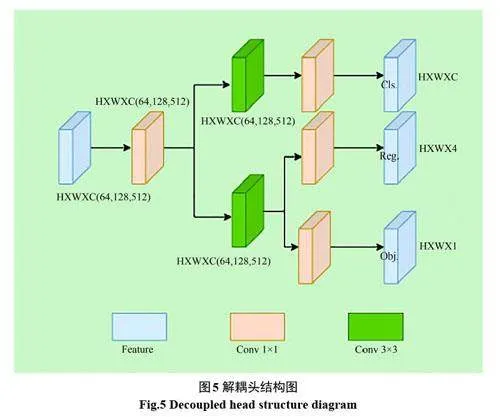
本文對檢測頭進(jìn)行解耦處理,其結(jié)構(gòu)如圖5所示。使用解耦頭(Decoupled detection head)后,解耦為兩個分支,使其分類和回歸任務(wù)的學(xué)習(xí)過程相互獨(dú)立,模型在學(xué)習(xí)不同任務(wù)時更加靈活,兩個任務(wù)之間不會相互干擾,可以提高模型的泛化能力。解耦頭也有助于模型更好地適應(yīng)不同尺度的目標(biāo),特別在涉及小目標(biāo)場景中,由于回歸任務(wù)得到獨(dú)立的學(xué)習(xí),可以期望在目標(biāo)定位上取得更加準(zhǔn)確的效果。而且不同的應(yīng)用場景可能對分類和回歸任務(wù)的需求不同,解耦頭允許模型在這兩個任務(wù)上進(jìn)行有差異性的學(xué)習(xí),從而更加適應(yīng)不同的需求。
算法具體實(shí)現(xiàn):(1)使用1×1的卷積調(diào)整通道數(shù)。(2)將輸入特征復(fù)制兩份,各自經(jīng)過3×3 的卷積。(3)一個分支通過1×1的卷積把通道調(diào)整為類別數(shù),本文為10 類別。(4)另一個分支通過1×1 的卷積,然后把該層特征復(fù)制成兩份,其中一個分支通過1×1的卷積把通道調(diào)整為4,用于確定目標(biāo)的坐標(biāo)以及寬高。另一個分支通過1×1的卷積把通道調(diào)整為1,從而確定目標(biāo)的置信度。
3 實(shí)驗(yàn)分析
3.1 實(shí)驗(yàn)環(huán)境與數(shù)據(jù)集
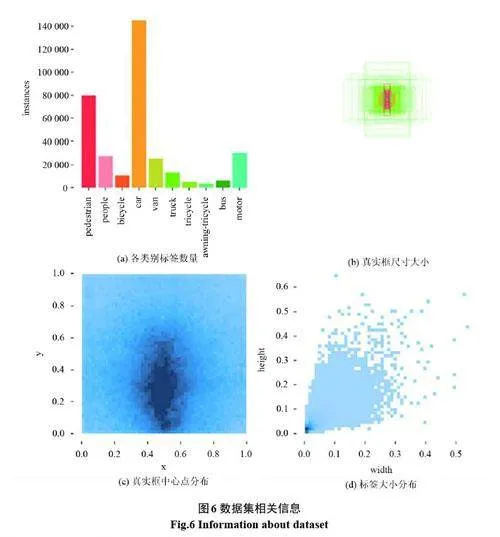
本文使用天津大學(xué)AISKYEYE團(tuán)隊(duì)采集并制作的VisDrone2019 數(shù)據(jù)集[21],該數(shù)據(jù)集主要用于評估和推動無人機(jī)視覺任務(wù)中的目標(biāo)檢測和跟蹤算法的發(fā)展。數(shù)據(jù)集是在不同場景、不同天氣和不同光照條件下使用不同型號的無人機(jī)收集的,人工標(biāo)注了超過260 萬個真實(shí)框或感興趣的目標(biāo)點(diǎn),主要包括了十個類別,分別是:行人(pedestrian)、人(people)、自行車(bicycle)、轎車(car)、貨車(van)、卡車(truck)、三輪車(tricycle)、遮陽篷三輪車(awning-tricycle)、公共汽車(bus)、摩托車(motor)。該數(shù)據(jù)集也已經(jīng)分別劃分好了訓(xùn)練集、驗(yàn)證集、測試集。數(shù)據(jù)集相關(guān)信息如圖6 所示。可以看出數(shù)據(jù)集中的類別分布極其不平衡,某些樣本數(shù)量遠(yuǎn)遠(yuǎn)多于其他類別,就引入了一定的數(shù)據(jù)偏斜問題,影響了模型在其他類別上的性能。
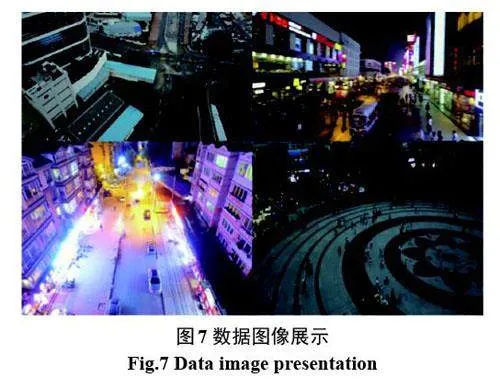
查看數(shù)據(jù)集,如圖7 所示。無人機(jī)視角下的圖像通常包含復(fù)雜的場景、具有大量小目標(biāo),這使得區(qū)分目標(biāo)與背景變得復(fù)雜。由于無人機(jī)在飛行過程中的不同高度和視角,圖像中的目標(biāo)會出現(xiàn)大幅度的尺度變換,特別是小目標(biāo)。由于拍攝過程中,受到陰影或者強(qiáng)光的影響,造成圖片模糊或者失真。以上因素都造成了該數(shù)據(jù)集在目標(biāo)檢測和識別任務(wù)中面臨著一些挑戰(zhàn)和困難。
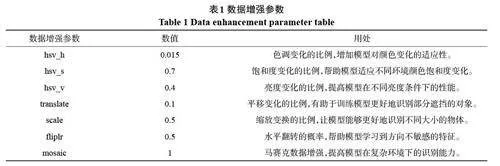
實(shí)驗(yàn)過程中采用的windows 電腦配置如下:Intel(R)i5-12400F 的CPU,32G 內(nèi)存,NVIDIAGeForce GTX 3060 12G 的圖像處理器。Python版本3.7.16,Pytorch 版本為1.11.0。訓(xùn)練輪次(epoch)初始為200,批處理大小為8,采用SGD梯度下降優(yōu)化器。數(shù)據(jù)增強(qiáng)參數(shù)如表1 所示,表中未提及參數(shù)都默認(rèn)為0,這些數(shù)據(jù)增強(qiáng)方法通過隨機(jī)地應(yīng)用圖像變換,有效地擴(kuò)展了訓(xùn)練數(shù)據(jù)集的多樣性,從而提高了模型對于實(shí)際應(yīng)用場景的適應(yīng)性和魯棒性。
3.2 評價指標(biāo)
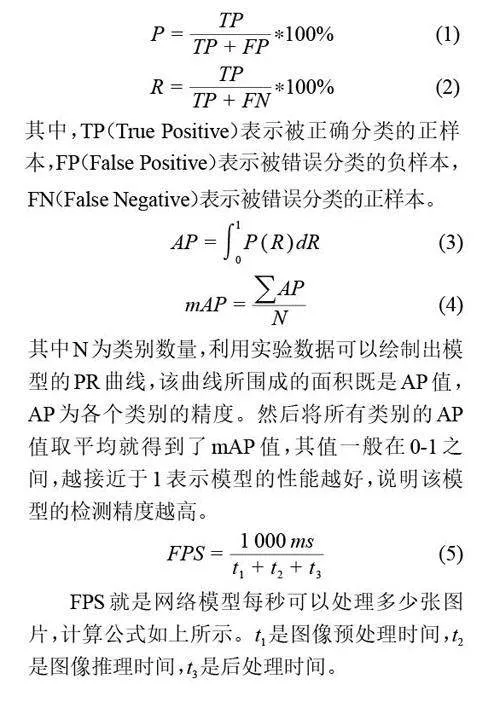
為了驗(yàn)證模型性能,本文選用精確率(Precision, P)、召回率(Recall, R)、平均精度均值(mean average precision, mAP)和檢測速度FPS來評估模型的檢測性能。
3.3 消融實(shí)驗(yàn)
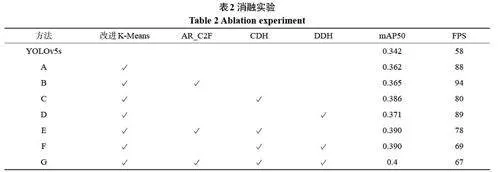
為了驗(yàn)證本文設(shè)計的改進(jìn)K-Means 聚類算法、自適應(yīng)特征融合模塊(AR_C2F)、更換檢測頭(CDH)、解耦檢測頭(DDH)的有效性。本文在YOLOv5s 原模型的基礎(chǔ)上進(jìn)行改進(jìn),對于以上改進(jìn)部分進(jìn)行消融實(shí)驗(yàn)。在VisDrone2019-DET-test-dev 數(shù)據(jù)集上進(jìn)行測試,采用mAP50 和FPS作為評價參數(shù)。
從表2 可以看出,在原有的模型上分別改進(jìn)四個模塊后,mAP50 分別提升了2%、2.3%、4.4%、3.9%。可以看出,這四個模塊分別對小目標(biāo)檢測任務(wù)都有一定的提升作用。實(shí)驗(yàn)E,當(dāng)同時使用改進(jìn)K-Means、AR_C2F、CDH等模塊時,可以看到在該測試集上,mAP50 達(dá)到了39%,提升了4.8%。實(shí)驗(yàn)F,當(dāng)同時使用改進(jìn)K-Means 聚類、CDH、DDH等模塊時,在該測試集上,mAP50達(dá)到了39%,提升了4.8%。最后在實(shí)驗(yàn)G上,當(dāng)四個模塊進(jìn)行耦合時,可以看到與未改進(jìn)的YOLOv5s 相比,mAP50 達(dá)到了40%,提升了5.8%。
3.4 檢測頭消融實(shí)驗(yàn)
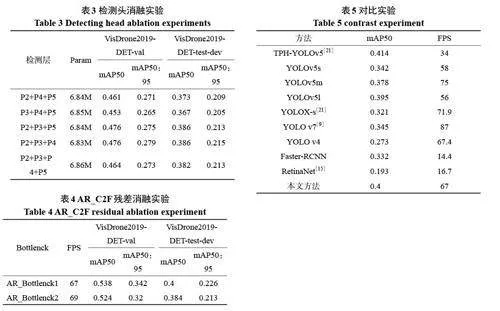
為了驗(yàn)證選取的檢測頭是否有效,如表3 所示,可以看出使用P2+P3+P4 檢測層后,mAP50為0.386,并且參數(shù)量最低。證明更換后的檢測頭,保留了更多小目標(biāo)的特征信息,降低了小目標(biāo)的漏檢和誤檢。同時減少了網(wǎng)絡(luò)的冗余,減少了參數(shù)量。加快了網(wǎng)絡(luò)的收斂速度。
3.5 AR_C2F殘差消融實(shí)驗(yàn)
在AR_C2F 中,Bottlenck 有兩種結(jié)構(gòu),即一種是帶殘差連接的,一種是不帶殘差連接的。經(jīng)過一系列實(shí)驗(yàn),研究Bottlenck 模塊中的殘差連接對目標(biāo)檢測性能的影響,并探究其對性能的貢獻(xiàn)。結(jié)果如表4 所示。實(shí)驗(yàn)結(jié)果表明,在殘差連接下,模型的性能達(dá)到最佳水平,移除殘差連接導(dǎo)致了精度的下降,特別是在小目標(biāo)檢測方面。所以采用帶殘差的模塊構(gòu)建最終模型。
3.6 對比實(shí)驗(yàn)
通過進(jìn)行大量實(shí)驗(yàn)對比了改進(jìn)后的算法與其他主流算法在VisDrone2019-DET-test-dev 數(shù)據(jù)集的表現(xiàn)效果,以驗(yàn)證改進(jìn)方法的有效性。對比結(jié)果如表5所示。
從表5 可以看出,本文方法與雙階段算法相比,如Faster-RCNN,本文mAP50 高出6.8%。而對比專注于小目標(biāo)算法的TPH-YOLOv5 算法,由于引入了Transformer 預(yù)測頭,導(dǎo)致計算量較大,所以推理速度較慢,本文方法在精度上與之差別甚微,但是速度上相比卻更有優(yōu)勢。對比YOLOV4、V7 以及其他所提到的YOLO 系列變形,本文方法的精度更高。可以看出本文方法在小目標(biāo)檢測任務(wù)上有一定優(yōu)勢,可以提高小目標(biāo)檢測精度。
3.7 可視化分析
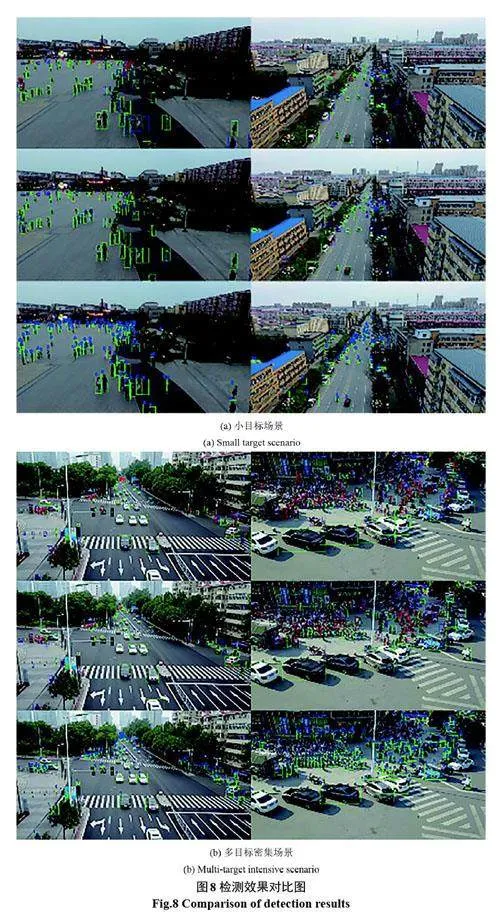
為了確認(rèn)本文改進(jìn)方法是否有效,本文選擇了小目標(biāo)、多目標(biāo)密集場景下的圖像進(jìn)行可視化。對TP、FP、FN 指標(biāo)分別使用綠色、藍(lán)色、紅色進(jìn)行可視化。TP 代表了正確檢測的樣本,F(xiàn)P表示誤檢的樣本,F(xiàn)N表示漏檢的樣本。
圖8(a)為小目標(biāo)場景下的對比效果,其中第一行的圖片為YOLOv5s 下的預(yù)測結(jié)果,第二行為使用本文方法預(yù)測的結(jié)果,第三行為原始的標(biāo)注圖片。從圖上可以看出在小目標(biāo)場景下,使用本文方法更能準(zhǔn)確識別小目標(biāo)。
圖8(b)為多目標(biāo)密集場景下的對比效果,從圖上可以看出在多目標(biāo)密集且存在遮擋現(xiàn)象時,本文方法更能區(qū)分目標(biāo)種類,也能降低漏檢的概率。
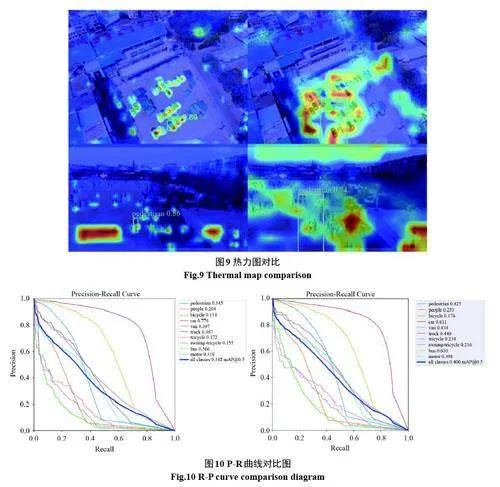
圖9 展示的是YOLOv5s 和本文算法的預(yù)測框中心點(diǎn)的熱力圖,左邊圖片是本文方法可視化結(jié)果,右邊是YOLOv5s 算法可視化結(jié)果,可以看出本文提出的自適應(yīng)特征融合模塊使感知區(qū)域更為準(zhǔn)確。
圖10 展示的是在原始YOLOv5s 模型(左)和本文改進(jìn)算法(右)在測試數(shù)據(jù)集上進(jìn)行推理得出的P-R 曲線,可以看出改進(jìn)算法在各個類別上的平衡點(diǎn)比原始YOLOv5s 模型都更接近右上角,改進(jìn)算法得到的模型較原始模型更能降低漏檢率,提高檢測準(zhǔn)確率。說明本文改進(jìn)算法對小目標(biāo)的檢測精度具有較大提升并且同時能夠降低漏檢率。
4 結(jié)束語
本文在YOLOv5s 算法基礎(chǔ)上進(jìn)行改進(jìn)。提出了一種基于自適應(yīng)特征融合的無人機(jī)小目標(biāo)檢測算法。該算法采用IOU 作為K-Means 聚類算法中的距離度量生成先驗(yàn)框;接著重構(gòu)C2F模塊替換原有的C3 模塊,以提高網(wǎng)絡(luò)的自適應(yīng)特征融合的能力;最后更換并解耦適合小目標(biāo)檢測的檢測頭,這使得更多的小目標(biāo)能夠被檢測到。同時允許分類和回歸任務(wù)獨(dú)立進(jìn)行互不干擾,從而提升了檢測精度;經(jīng)過一系列實(shí)驗(yàn)證明,本文方法在無人機(jī)視角下的小目標(biāo)檢測具有較好的檢測效果。能夠有效的完成密集小目標(biāo)的檢測任務(wù),該算法也可以遷移到很多農(nóng)業(yè)場景,如精準(zhǔn)農(nóng)業(yè)管理、早期病蟲害檢測、水稻田和果園管理。但后期工作需要對模型進(jìn)行優(yōu)化,可以采用一系列剪枝算法、蒸餾算法對模型進(jìn)行壓縮,提高其推理速度,使模型能夠在無人機(jī)上實(shí)際部署應(yīng)用。
參考文獻(xiàn)
[1] Gall J, Yao A, Razavi N, et al. Hough forests for
object detection, tracking, and action recognition[J].
IEEE transactions on pattern analysis and machine
intelligence, 2011, 33(11): 2188-2202.
[2] Viola P, Jones M. Rapid object detection using a
boosted cascade of simple features[C]//Proceedings
of the 2001 IEEE computer society conference on
computer vision and pattern recognition. CVPR
2001. Ieee, 2001,1:I-I.
[3] Banharnsakun A, Tanathong S. Object detection
based on template matching through use of best-so-far
ABC[J]. Computational intelligence and neuroscience,
2014, 2014:919406.
[4] Girshick R, Donahue J, Darrell T, et al. Rich feature
hierarchies for accurate object detection and
semantic segmentation[C]//Proceedings of the IEEE
conference on computer vision and pattern
recognition. 2014: 580-587.
[5] Ren S, He K, Girshick R, et al. Faster r-cnn: Towards
real-time object detection with region proposal
networks[J]. Advances in neural information
processing systems, 2015, 28.
[6] Redmon J, Divvala S, Girshick R, et al. You only
look once: Unified, real-time object detection[C]//
Proceedings of the IEEE conference on computer
vision and pattern recognition. 2016:779-788.
[7] Redmon J, Farhadi A. Yolov3: An incremental
improvement[J]. arXiv preprint arXiv:1804.02767, 2018.
[8] Bochkovskiy A, Wang CY, Liao HYM. Yolov4:
Optimal speed and accuracy of object detection[J].
arXiv preprint arXiv:2004.10934, 2020.
[9] Wang CY, Bochkovskiy A, Liao HYM. YOLOv7:
Trainable bag-of-freebies sets new state-of-the-art
for real-time object detectors[C]//Proceedings of the
IEEE/CVF Conference on Computer Vision and
Pattern Recognition. 2023:7464-7475.
[10] Lyu Z, Jin H, Zhen T, et al. Small object recognition
algorithm of grain pests based on ssd feature fusion[J].
IEEE Access, 2021, 9: 43202-43213.
[11] Lin TY, Goyal P, Girshick R, et al. Focal loss for
dense object detection[C]//Proceedings of the IEEE
international conference on computer vision. 2017:
2980-2988.
[12] 周華平,郭 偉. 改進(jìn)YOLOv5 網(wǎng)絡(luò)在遙感圖像目標(biāo)
檢測中的 應(yīng)用[J]. 遙感信息,2022,37(5):23-30.
[13] 齊向明,柴 蕊,高一萌. 重構(gòu)SPPCSPC 與優(yōu)化下采
樣的小目標(biāo)檢測算法[J]. 計算機(jī)工程與應(yīng)用,2023,
59(20):158-166.
[14] Zhu X, Lyu S, Wang X, et al. TPH-YOLOv5: Improved
YOLOv5 based on transformer prediction head for
object detection on drone-captured scenarios[C]//
Proceedings of the IEEE/CVF international conference
on computer vision. 2021:2778-2788.
[15] 劉 濤,高一萌,柴 蕊,等. 改進(jìn)YOLOv5 的無人機(jī)視
角下小目標(biāo)檢測算法[J/OL]. 計算機(jī)工程與應(yīng)用:1-
16[2024-01-11].
[16] 徐 堅,謝正光,李洪均. 特征平衡的無人機(jī)航拍圖像
目標(biāo)檢測算法[J]. 計算機(jī)工程與應(yīng)用,2023,59(06):
196-203.
[17] Howard AG, Zhu M, Chen B, et al. Mobilenets:
Efficient convolutional neural networks for mobile
vision applications[J]. arXiv preprint arXiv:
1704.04861, 2017.
[18] Zheng Z, Wang P, Liu W, et al. Distance-IoU loss:
Faster and better learning for bounding box
regression[C]//Proceedings of the AAAI conference
on artificial intelligence. 2020, 34(07):12993-13000.
[19] Rezatofighi H, Tsoi N, Gwak JY, et al. Generalized
intersection over union: A metric and a loss for
bounding box regression[C]//Proceedings of the
IEEE/CVF conference on computer vision and
pattern recognition. 2019:658-666.
[20] Zhang QL, Yang YB. Sa-net: Shuffle attention for
deep convolutional neural networks[C]//ICASSP
2021-2021 IEEE International Conference on
Acoustics, Speech and Signal Processing (ICASSP).
IEEE, 2021:2235-2239.
[21] 彭晏飛,趙 濤,陳炎康,等. 基于上下文信息與特征
細(xì)化的無人機(jī)小目標(biāo)檢測算法[J/OL]. 計算機(jī)工程
與應(yīng)用,1-8[2024-03-06].