單壓電陶瓷驅(qū)動(dòng)回轉(zhuǎn)定位平臺(tái)實(shí)驗(yàn)分析
2024-01-02 10:49:16馬鵬飛崔良玉鐘俊杰韓建鑫
壓電與聲光 2023年6期
關(guān)鍵詞:測(cè)量
馬鵬飛,崔良玉,2,鐘俊杰,韓建鑫,2
(1. 天津職業(yè)技術(shù)師范大學(xué) 機(jī)械工程學(xué)院,天津 300222;2.天津職業(yè)技術(shù)師范大學(xué) 天津市高速切削與精密加工重點(diǎn)實(shí)驗(yàn)室,天津 300222)
0 引言
在當(dāng)代科學(xué)和工程領(lǐng)域,微納米定位技術(shù)正日益成為各領(lǐng)域面臨的共性關(guān)鍵技術(shù)問題。從生物醫(yī)學(xué)到微納米電子領(lǐng)域,從航空航天到精密加工技術(shù),微納米定位技術(shù)已滲透到各個(gè)領(lǐng)域,并在許多應(yīng)用中展現(xiàn)出巨大潛力[1-4]。基于柔性鉸鏈的傳動(dòng)技術(shù)與壓電陶瓷驅(qū)動(dòng)器的驅(qū)動(dòng)原理,國內(nèi)外學(xué)者對(duì)微納米定位平臺(tái)進(jìn)行了深入廣泛的研究與探索,開發(fā)了多種微納米定位平臺(tái)。現(xiàn)階段微納定位平臺(tái)主要使用壓電陶瓷、音圈電機(jī)作為驅(qū)動(dòng)源,通過柔性鉸鏈將位移進(jìn)行傳遞以實(shí)現(xiàn)高精度運(yùn)動(dòng)[5]。Wang等[6]設(shè)計(jì)制作了一種大柔度柔性微定位平臺(tái),采用雙四桿機(jī)構(gòu)完全解耦,在x、y方向位移均為-700~700 μm。Sun等[7]設(shè)計(jì)的二自由度微定位平臺(tái)使用嵌套結(jié)構(gòu)使得平臺(tái)的x、y方向運(yùn)動(dòng)互不干擾,x方向最大輸出位移為489 μm,y方向最大輸出位移為493 μm,最大耦合率為2.7%。Wang等[8]設(shè)計(jì)了一種對(duì)稱剛?cè)狁詈衔⒍ㄎ黄脚_(tái),該平臺(tái)由3組并聯(lián)對(duì)稱的柔性驅(qū)動(dòng)機(jī)構(gòu)和剛性平臺(tái)組成。每組對(duì)稱平行柔性鉸鏈中間設(shè)有楔形結(jié)構(gòu),誤差為7.8%,具有良好的承載性能。李長(zhǎng)奇等[9]對(duì)空間三自由度微定位平臺(tái)進(jìn)行設(shè)計(jì)優(yōu)化,采用多個(gè)橋式放大機(jī)構(gòu),可在z方向運(yùn)動(dòng),有效地降低了耦合位移。
國內(nèi)外學(xué)者對(duì)于微納定位平臺(tái)的研究大多集中在多自由度平動(dòng)平臺(tái),而對(duì)單壓電陶瓷驅(qū)動(dòng)的微轉(zhuǎn)動(dòng)平臺(tái)研究較少。轉(zhuǎn)動(dòng)通常由多個(gè)壓電陶瓷驅(qū)動(dòng)器的耦合作用實(shí)現(xiàn),控制過程較復(fù)雜。為了增大多自由度微納定位平臺(tái)集成的靈活性,降低設(shè)計(jì)成本及控制難度,有必要開發(fā)單壓電陶瓷驅(qū)動(dòng)的微轉(zhuǎn)動(dòng)平臺(tái)。
本文基于柔性鉸鏈設(shè)計(jì)了一種單壓電陶瓷驅(qū)動(dòng)的純轉(zhuǎn)動(dòng)微定位平臺(tái),平臺(tái)采用圓周陣列式柔性梁實(shí)現(xiàn)運(yùn)動(dòng)導(dǎo)向與解耦,通過杠桿機(jī)構(gòu)增大動(dòng)平臺(tái)轉(zhuǎn)動(dòng)行程。首先通過有限元仿真驗(yàn)證了圓周陣列式柔性梁對(duì)動(dòng)平臺(tái)軸心漂移的抑制作用,然后通過實(shí)驗(yàn)對(duì)其運(yùn)動(dòng)特征進(jìn)行測(cè)試與分析。
1 回轉(zhuǎn)定位平臺(tái)結(jié)構(gòu)
1.1 回轉(zhuǎn)定位平臺(tái)結(jié)構(gòu)
圖1為回轉(zhuǎn)定位平臺(tái)整體結(jié)構(gòu)。該平臺(tái)由壓電陶瓷驅(qū)動(dòng)器、單級(jí)杠桿放大機(jī)構(gòu)、固定平臺(tái)、動(dòng)平臺(tái)和柔性鉸鏈組成。單極放大機(jī)構(gòu)具有結(jié)構(gòu)簡(jiǎn)單,剛度大及功效好的優(yōu)點(diǎn),與動(dòng)平臺(tái)間通過一個(gè)直圓形柔性鉸鏈進(jìn)行連接,動(dòng)平臺(tái)與固定平臺(tái)由4個(gè)兩兩互為90°夾角、呈十字形分布的直板型柔性鉸鏈連接,結(jié)構(gòu)上的對(duì)稱可在一定程度上抑制軸心漂移。固定平臺(tái)由內(nèi)圈部分和外框部分組成。通過螺孔將平臺(tái)固定在氣浮隔振平臺(tái)上。工作時(shí)壓電陶瓷驅(qū)動(dòng)器將伸縮位移傳動(dòng)至單級(jí)杠桿放大機(jī)構(gòu),位移放大后通過直圓柔性鉸鏈再傳動(dòng)至動(dòng)平臺(tái),從而產(chǎn)生轉(zhuǎn)動(dòng)。柔性鉸鏈可自由地在xy平面內(nèi)彎曲旋轉(zhuǎn),但在z軸上具有較小自由度,幾乎不產(chǎn)生位移。

圖1 回轉(zhuǎn)平臺(tái)原理圖
1.2 回轉(zhuǎn)定位平臺(tái)有限元分析
為驗(yàn)證圓周陣列式柔性梁的運(yùn)動(dòng)導(dǎo)向與解耦作用,通過有限元軟件ANSYS進(jìn)行了仿真分析。該結(jié)構(gòu)使用電火花線切割一體加工而成,平臺(tái)尺寸為132 mm×132 mm×12 mm。所用材料為鋁合金7057。該材料的彈性模量E=71 GPa,泊松比n=0.33,屈服強(qiáng)度σ=455 MPa,剪切模量G=26.69 GPa,密度ρ=2 810 kg/m2。圓柱坐標(biāo)系下仿真結(jié)果如圖2所示。當(dāng)回轉(zhuǎn)定位平臺(tái)輸入位移為20 μm時(shí),4根呈圓柱陣列分布的柔性梁可實(shí)現(xiàn)良好的運(yùn)動(dòng)導(dǎo)向及解耦作用,動(dòng)平臺(tái)外側(cè)轉(zhuǎn)過的弧長(zhǎng)均為49.5 μm,而內(nèi)側(cè)轉(zhuǎn)過的最大與最小弧長(zhǎng)分別為44 μm及38.5 μm,軸心漂移位置如圖2所示。平臺(tái)的輸出位移平均值為41.1 μm,測(cè)得平臺(tái)輸出位移位置為圓環(huán)半圓處中點(diǎn)位置,平臺(tái)中心到此位置的距離為4.5 cm。因此,有限元仿真的放大倍數(shù)為2.06倍,軸心漂移量在x方向約為0,y方向約為-5.5 μm。
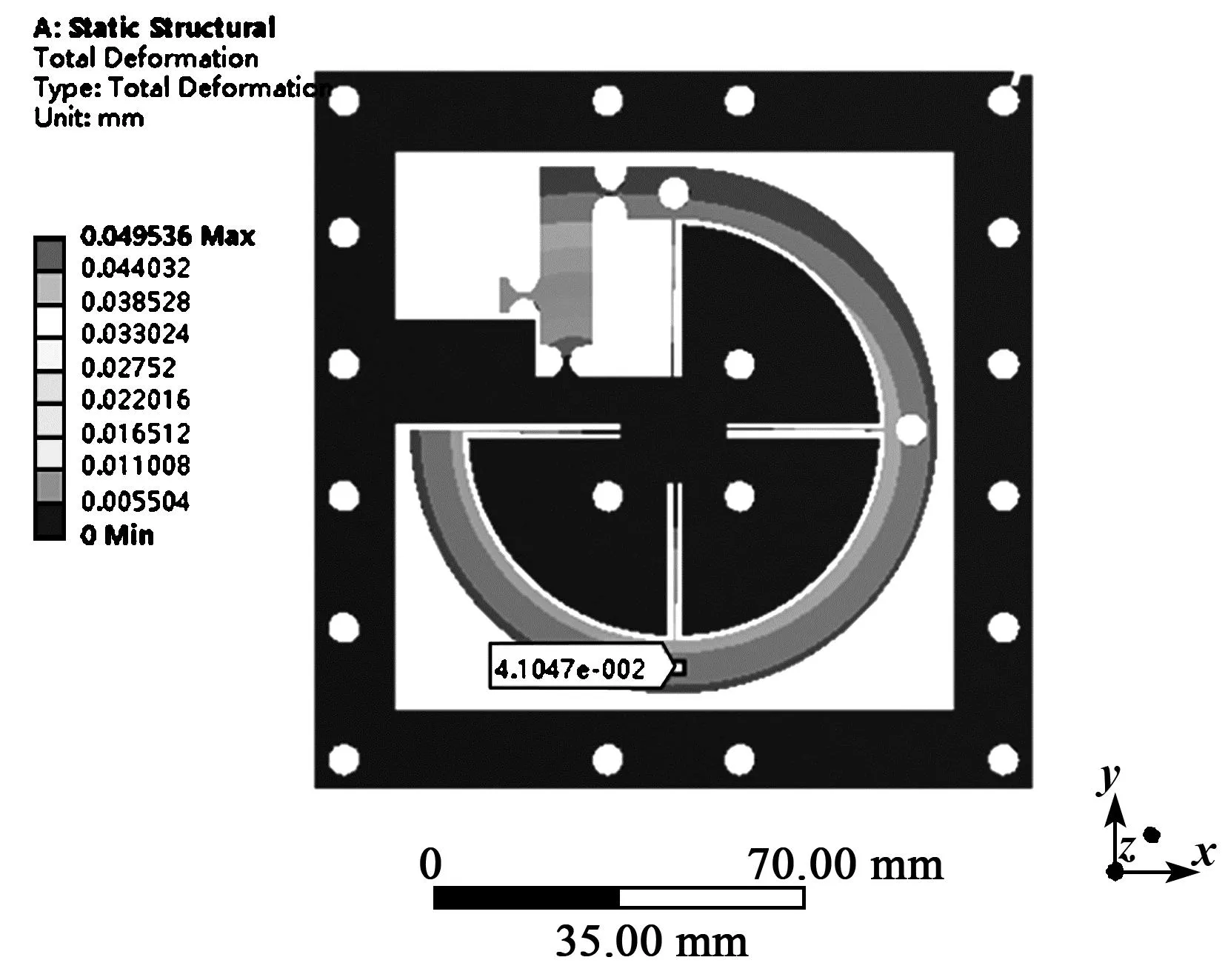
圖2 回轉(zhuǎn)平臺(tái)軸心漂移仿真圖
2 回轉(zhuǎn)定位平臺(tái)實(shí)驗(yàn)驗(yàn)證
2.1 實(shí)驗(yàn)設(shè)計(jì)
為了測(cè)試平臺(tái)的行程及軸心漂移量,搭建的實(shí)驗(yàn)系統(tǒng)如圖3所示。實(shí)驗(yàn)所用壓電陶瓷為芯明天PSt150,在驅(qū)動(dòng)電壓150 V下最大位移為28 μm±15%。在驅(qū)動(dòng)電壓120 V下標(biāo)稱位移為20 μm±15%,剛度為60 N/μm,遠(yuǎn)大于平臺(tái)結(jié)構(gòu)剛度,最大推力為1 600 N。所采用的電壓驅(qū)動(dòng)器為PI公司的HVPZT-AMPLIFIER,最大可輸出電壓為1 000 V。電容傳感器為美國雄獅公司的CPL290,可測(cè)量范圍為10 μm~12.5 mm。利用MATLAB-SIMULINK和dSPACE的MicroLaBox進(jìn)行回轉(zhuǎn)平臺(tái)位移信號(hào)的采集和輸出電壓的控制,計(jì)算機(jī)使用dSPACE的ControlDesk系統(tǒng)進(jìn)行數(shù)據(jù)信號(hào)的可視化。

圖3 實(shí)驗(yàn)系統(tǒng)
2.2 回轉(zhuǎn)平臺(tái)放大倍數(shù)測(cè)量方法
首先在壓電陶瓷驅(qū)動(dòng)器緊貼單級(jí)杠桿放大端放置測(cè)量塊,用于測(cè)量其實(shí)際伸縮量,然后分別在回轉(zhuǎn)平臺(tái)動(dòng)平臺(tái)上的4個(gè)對(duì)稱位置測(cè)量位移,將電容傳感器放置于對(duì)應(yīng)位置的切線方向,與測(cè)量塊位移平面垂直,實(shí)驗(yàn)測(cè)量如圖4所示。

圖4 平臺(tái)放大倍數(shù)實(shí)驗(yàn)測(cè)量圖
2.3 微旋轉(zhuǎn)平臺(tái)的角度旋轉(zhuǎn)測(cè)量方法
使用3個(gè)位移傳感器進(jìn)行回轉(zhuǎn)平臺(tái)角度的測(cè)量(見圖5),平臺(tái)以順時(shí)針方向帶動(dòng)測(cè)量塊旋轉(zhuǎn),先假設(shè)測(cè)量塊為一個(gè)點(diǎn)D,位于其中心位置,x1為水平方向,即旋轉(zhuǎn)運(yùn)動(dòng)中D點(diǎn)的切線方向所測(cè)位移,y2、y3為豎直方向所測(cè)位移,點(diǎn)的下方邊沿L1為初始水平線,左邊沿以m1為初始豎直線,平臺(tái)繞圓心旋轉(zhuǎn)角度為θ,旋轉(zhuǎn)后L1位置變?yōu)長(zhǎng)3,m1位置變?yōu)閙2,L1與L3的夾角為所旋轉(zhuǎn)角θ,同時(shí)m1與m2的夾角也為θ,線EF與L2都平行于L1,所以∠AFE=∠AHG=θ。θ可由△NHG求出。
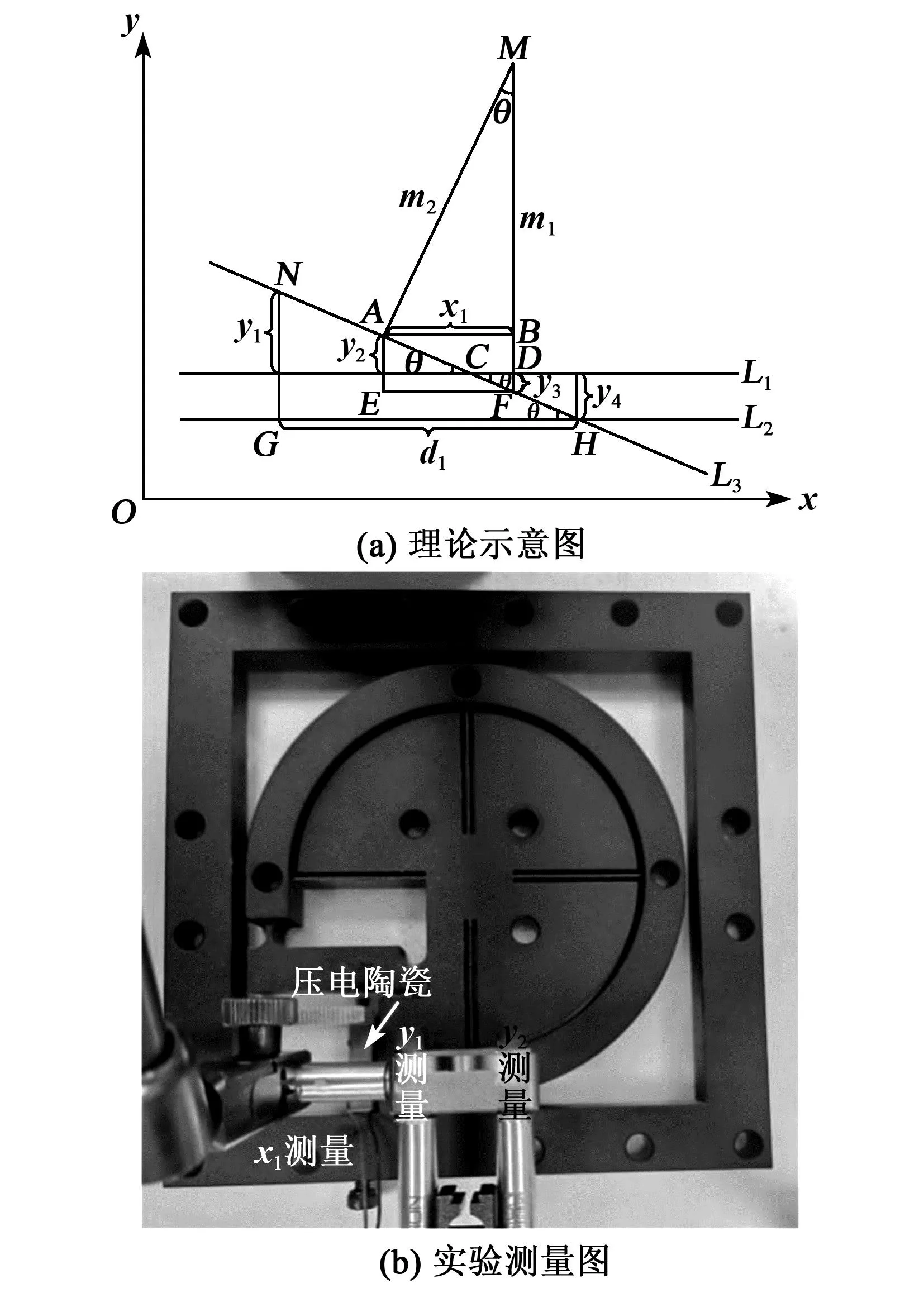
圖5 角度測(cè)量示意圖
由圖5(a)可得:
tanθ=(y2+y3)÷x1
(1)
θ=arctan [(y2+y3)÷x1]
(2)
δx=x3-[(x1+x3)÷2]
(3)
δy=x2-[(x2+x4)÷2]
(4)
式中:y2,y3為理想位置處所測(cè)豎直位移;δx、δy分別為x、y軸的軸漂位移;x1為圖4中位置1的切線方向位移,對(duì)應(yīng)于圖5(a)中的x1;x2,x3,x4分別為圖4中位置2-4對(duì)應(yīng)的切線方向位移。 實(shí)際測(cè)量中,如圖5(b)所示,使用y1代替y2,y4代替y3,兩個(gè)豎直方向傳感器的軸心距離d1代替x1,由△AFE∽△NHG,根據(jù)式(2)可計(jì)算出θ。在△ABM中,sinθ=x1/m2,由此可計(jì)算出m2的長(zhǎng)度,而m2等于回轉(zhuǎn)平臺(tái)中心到測(cè)量方塊中心的距離,即應(yīng)近似等于旋轉(zhuǎn)半徑m1,標(biāo)準(zhǔn)旋轉(zhuǎn)半徑為4.5 cm。
3 實(shí)驗(yàn)結(jié)果與分析
3.1 放大倍數(shù)
在無負(fù)載情況下,輸入電壓150 V時(shí),壓電陶瓷驅(qū)動(dòng)器標(biāo)稱輸出位移約為24 μm,而實(shí)驗(yàn)測(cè)得回轉(zhuǎn)平臺(tái)的最大輸入位移為20.378 7 μm,這是由于柔性鉸鏈導(dǎo)向機(jī)構(gòu)具有一定的剛度,導(dǎo)致回轉(zhuǎn)平臺(tái)的最終輸入位移無法達(dá)到其標(biāo)稱位移。當(dāng)輸入電壓為120~150 V時(shí),壓電陶瓷驅(qū)動(dòng)器輸出位移有較明顯的畸變,這是由于上述剛度問題對(duì)放大倍數(shù)的影響。故實(shí)驗(yàn)測(cè)試中,使用輸入電壓為0~120 V、幅值間隔為10 V的12組數(shù)據(jù)進(jìn)行測(cè)量,測(cè)試結(jié)果如圖6所示。

圖6 不同位置位移對(duì)比
由圖6可知,位置2所測(cè)得位移與仿真計(jì)算位移最接近,兩條線基本重合。其次是位置1,驅(qū)動(dòng)器輸入位移經(jīng)過單級(jí)杠桿放大后,輸出位移最先傳遞至位置1,在驅(qū)動(dòng)電壓0~120 V下,位置1的位移放大倍數(shù)為1.9~1.98倍,與理論位移的誤差最大為2.7 μm,誤差比為4.3%~7.5%,誤差隨著輸入位移的增大而增大,波動(dòng)范圍較大。驅(qū)動(dòng)電壓為0~120 V時(shí),位置2位移放大倍數(shù)為2.07~2.14倍,與理論位移的誤差最大為0.3 μm;驅(qū)動(dòng)電壓為70~120 V時(shí),放大倍數(shù)約為2.07倍,與理論分析放大倍數(shù)(2.06倍)基本接近,誤差隨著輸入位移的增加波動(dòng)較小,在1%內(nèi)。位置3、4的輸出位移較理論仿真位移相差較大,說明平臺(tái)在運(yùn)動(dòng)過程中仍存在一定的軸心漂移,并且平臺(tái)在加工過程中也可能存在一定誤差,故導(dǎo)致此結(jié)果。
3.2 回轉(zhuǎn)平臺(tái)旋轉(zhuǎn)角度分析
使用第2節(jié)的角度測(cè)量方法對(duì)實(shí)驗(yàn)數(shù)據(jù)進(jìn)行計(jì)算,分別測(cè)量了4個(gè)位置對(duì)應(yīng)切線方向和豎直方向的位移,所得結(jié)果如圖7所示。

圖7 4個(gè)位置旋轉(zhuǎn)角度對(duì)比
由圖7可見,位置1主要為整個(gè)動(dòng)平臺(tái)施加位移驅(qū)動(dòng),為平動(dòng)位移,其旋轉(zhuǎn)角度較小,故所得結(jié)果與其他3個(gè)位置相差較大,位置1不宜作為主要參考。位置2的水平位移數(shù)據(jù)按第3.1節(jié)所得結(jié)果,與標(biāo)準(zhǔn)數(shù)據(jù)最接近。對(duì)位置2的數(shù)據(jù)進(jìn)行分析,使用千分尺測(cè)得2個(gè)電容傳感器的間距為27.46 mm,再減去電容傳感器的直徑?8 mm,2個(gè)電容傳感器軸心距離d1≈19.46 mm,利用式(1)計(jì)算平臺(tái)旋轉(zhuǎn)角度。在電壓150 V下輸出最大位移為43.143 9 μm,回轉(zhuǎn)平臺(tái)旋轉(zhuǎn)弧度約為916.12 μrad,計(jì)算得到位置2的旋轉(zhuǎn)半徑約為4.7 cm,標(biāo)準(zhǔn)半徑按照回轉(zhuǎn)平臺(tái)圓心到動(dòng)平臺(tái)內(nèi)外邊沿中間的距離為4.5 cm,按此標(biāo)準(zhǔn)計(jì)算旋轉(zhuǎn)角度誤差為4.5%~4.65%。位置2的每1 μm位移對(duì)應(yīng)旋轉(zhuǎn)弧度約為21.2 μrad。位置3誤差最小,最大誤差僅為0.26%。位置4誤差范圍較大(為7.9%~8.9%)。
由圖7可知,輸入電壓超過120 V時(shí),位移線性度變差,與旋轉(zhuǎn)角度整體線性度一致,但每個(gè)位置在不同電壓下計(jì)算半徑及誤差波動(dòng)變化較小,說明位移線性度對(duì)旋轉(zhuǎn)角度影響不大。此外,以位置2為例,旋轉(zhuǎn)角度整體誤差為4.65%,相較于位移誤差1%變化較大,導(dǎo)致此結(jié)果的原因除第3.1節(jié)所述外,還因測(cè)量塊無法被精準(zhǔn)地放置于動(dòng)平臺(tái)中心位置,這導(dǎo)致標(biāo)準(zhǔn)半徑與4.5 cm有偏差。其次測(cè)量水平位移x1時(shí)也無法保證放置于測(cè)量塊中心位置,使所測(cè)x1也存在偏差。但旋轉(zhuǎn)角度總體誤差波動(dòng)范圍較小,說明實(shí)驗(yàn)結(jié)果仍有參考性。
3.3 回轉(zhuǎn)平臺(tái)分辨率分析
通過輸入步進(jìn)電壓為0.1 V、總幅值為1 V的三角階梯信號(hào)對(duì)平臺(tái)進(jìn)行分辨率測(cè)試,所得結(jié)果如圖8所示。由圖可知,平臺(tái)最小步進(jìn)位移維持在0.025 μm內(nèi),旋轉(zhuǎn)最小步進(jìn)角精度可達(dá)0.53 μrad。

圖8 三角階梯信號(hào)分辨率測(cè)試
3.4 微旋轉(zhuǎn)平臺(tái)中心軸心漂移誤差補(bǔ)償分析
通過對(duì)平臺(tái)4個(gè)位置的位移進(jìn)行計(jì)算分析,利用式(3)、(4)計(jì)算得到回轉(zhuǎn)平臺(tái)的軸心漂移位移數(shù)據(jù)如圖9所示。軸心向位置2方向偏移量為0~0.23 μm,向位置3方向偏移量為0~4.59 μm,此結(jié)果與有限元分析基本吻合。針對(duì)軸心漂移對(duì)實(shí)驗(yàn)數(shù)據(jù)進(jìn)行補(bǔ)償,首先對(duì)x1進(jìn)行補(bǔ)償,以位置2為例,軸心向位置3的偏移量即為位置2的位移x1多偏移的量,x1減去此漂移量即是位置2實(shí)際水平位移,然后對(duì)位置2的y1與y4進(jìn)行補(bǔ)償,這兩個(gè)數(shù)據(jù)通過旋轉(zhuǎn)測(cè)試所得,無法用軸心偏移量直接計(jì)算補(bǔ)償,故使用計(jì)算的旋轉(zhuǎn)半徑進(jìn)行補(bǔ)償,位置2計(jì)算旋轉(zhuǎn)半徑約為4.7 cm,與標(biāo)準(zhǔn)半徑4.5 cm相比多4.4%,所以將y1與y4之和減去其總量的4.4%。位置3、4的補(bǔ)償方法同理。

圖9 軸漂位移數(shù)據(jù)
依據(jù)上述補(bǔ)償方法重新計(jì)算不同位置的旋轉(zhuǎn)角度如圖10所示。3個(gè)位置旋轉(zhuǎn)角度曲線基本重合,位置2最大誤差降為2.4%,位置3大部分?jǐn)?shù)據(jù)仍維持在0.2%內(nèi),位置4最大誤差降為4.89%。平臺(tái)動(dòng)平臺(tái)整體每1 μm位移對(duì)應(yīng)旋轉(zhuǎn)弧度為22.5 μrad。

圖10 軸漂補(bǔ)償后旋轉(zhuǎn)角度
4 結(jié)束語
單壓電陶瓷驅(qū)動(dòng)回轉(zhuǎn)定位平臺(tái)能夠有效地實(shí)現(xiàn)旋轉(zhuǎn)位移,通過實(shí)驗(yàn)對(duì)其旋轉(zhuǎn)角度進(jìn)行測(cè)量,結(jié)果表明,當(dāng)壓電陶瓷伸縮位移為0~17 μm時(shí),該平臺(tái)能通過杠桿放大機(jī)構(gòu)將壓電陶瓷實(shí)際位移放大至2.07倍,此時(shí)最大輸出弧度位移為916 μrad,動(dòng)平臺(tái)最小旋轉(zhuǎn)弧度分辨率為0.53 μrad,但由于制作工藝等原因仍存在一定的軸心漂移影響,整體旋轉(zhuǎn)角度誤差最大為8.9%,對(duì)軸心漂移進(jìn)行補(bǔ)償后,旋轉(zhuǎn)角度最大誤差可維持在5%內(nèi)。實(shí)驗(yàn)結(jié)果表明,該回轉(zhuǎn)平臺(tái)性能表現(xiàn)較好,滿足預(yù)期目標(biāo),在微納米回轉(zhuǎn)定位領(lǐng)域中具有一定的應(yīng)用前景和可行性。
猜你喜歡
小學(xué)科學(xué)(學(xué)生版)(2021年5期)2021-07-22 02:40:06
中學(xué)生數(shù)理化·八年級(jí)物理人教版(2019年9期)2019-11-25 07:33:02
中學(xué)生數(shù)理化·八年級(jí)物理人教版(2019年3期)2019-04-25 06:20:54
中學(xué)生數(shù)理化·八年級(jí)物理人教版(2018年3期)2018-05-31 08:52:45
數(shù)學(xué)小靈通(1-2年級(jí))(2017年10期)2017-11-08 08:39:45
軍事文摘·科學(xué)少年(2017年4期)2017-06-20 23:25:16
軍事文摘·科學(xué)少年(2017年2期)2017-04-26 21:58:43
中學(xué)生數(shù)理化·八年級(jí)物理人教版(2016年3期)2016-04-07 04:49:32
少兒科學(xué)周刊·兒童版(2016年1期)2016-03-14 03:52:21
閱讀與作文(小學(xué)低年級(jí)版)(2015年4期)2015-04-29 00:00:00