無人機空基回收技術研究
2024-01-01 00:00:00魏曉恒馬鐵林王祥勝王致遠
無人機 2024年4期
蜂群無人機是指能夠在有人操控或自主協同下開展偵察、干擾和攻擊的無人機集群,其可以通過內部網絡交換信息,并根據戰場實際情況自主或接受外部指令確定作戰行動。執行的作戰任務主要包括壓制/摧毀敵防空系統、超視距作戰、協同偵察與打擊、棲息和凝視作戰、傳感器空中投放、反無人系統、機載分層網絡構建、武器系統作戰支持以及持續信息優勢作戰等。
蜂群無人機一般采用空基集群發射和回收的方式,由運輸機、戰斗機或轟炸機,將蜂群無人機帶到任務區域上,然后進行空中集群投放,利用無人機集群作戰優勢,對目標區域進行偵察、干擾或打擊,任務結束后母機(一般由改裝后的運輸機擔當)對蜂群無人機進行快速而又精準的空基集群回收。無人機空基回收技術可以有效解決中小型無人機航程有限的固有劣勢,使其可以執行較遠距離的任務,發揮蜂群無人機的戰術優勢。所以,無人機的空基回收技術是無人機集群作戰實用化的關鍵瓶頸技術。
空基回收發展歷程
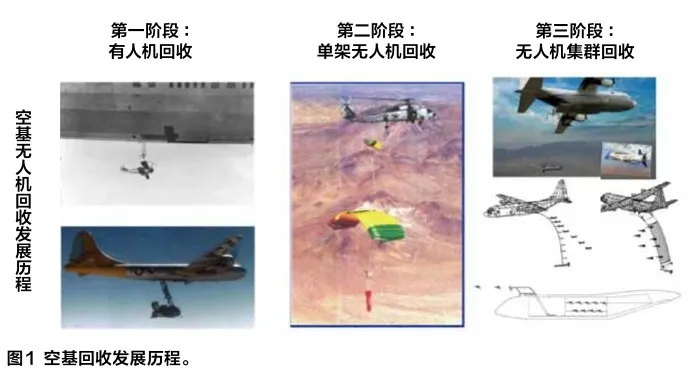
空基回收的發展經歷了三個階段:第一階段有人機空基回收,利用飛艇或者大型運輸機轟炸機為母機,對有人機進行空中回收;第二階段單架無人機空基回收;第三階段無人機集群空基回收。
有人機空基回收階段
為了給飛艇或者轟炸機護航,解決戰斗機由于航程短,無法執行遠程護航任務的問題,早在一戰時期就開發出了飛艇或者轟戰機作為母機,小型戰斗機作為子機的子母機組合,典型代表有美國在冷戰時期為了給遠程轟炸機護航而研發的可掛載在B-29和B-36轟炸機上的XF-85“哥布林”戰斗機。戰斗機是由母機機腹下的伸縮機構實現投放和回收,戰斗機的座艙前方安裝了一個可伸縮的鉤子用于回收。回收過程中,戰斗機從母機后下方接近,通過伸縮鉤勾住從母機機腹伸出的吊桿,隨后飛機被拉入母機機腹內。
單架無人機空基回收階段
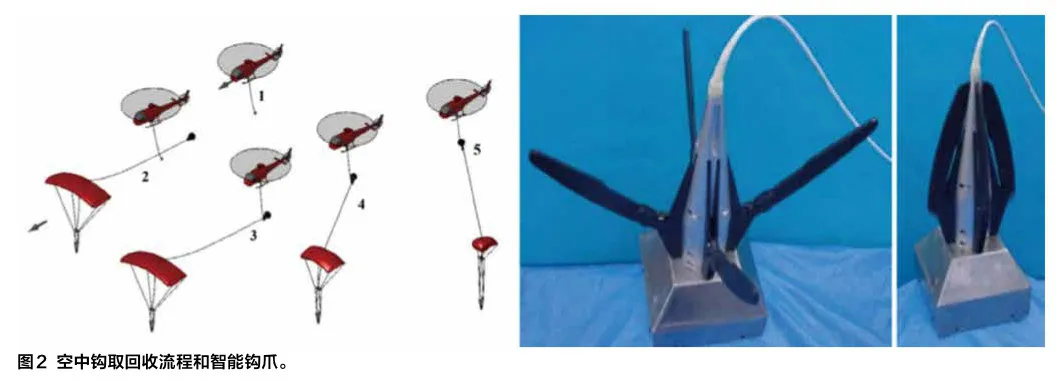
在20世紀60年代,為了實現衛星、航天器返回艙和無人機快速、精確、可靠性的空中回收,發展了空中鉤取傘回收技術。空中鉤取傘回收技術的發展經歷了三個時期,最早的空中鉤取傘回收一般由回收機、絞盤、鉤掛裝置、圓形降落傘系統組成,后來經歷了滑翔翼傘、智能鉤爪兩次技術變革。由美國Vertigo公司和洛克希德·馬丁公司聯合研制了第三代的空基回收系統,其典型特征是采用智能鉤爪(如圖2所示),基本不需要對直升機進行專門改裝。典型回收流程如下:(1)直升機低速靠近回收傘;(2)鉤爪靠近引導傘傘繩;(3)鉤爪感知到傘繩并自動閉合,完成鉤掛工作;(4)直升機上升,收口裝置工作,翼傘排氣;(5)翼傘的收口排氣完成,直升機拖帶貨物運輸至目的地。

無人機集群空基回收階段
隨著蜂群無人機的出現和發展,無人機空基集群回收的需求變得十分迫切,典型的回收方式有撞網式回收、機械臂回收、穩定拖靶回收、機械臂+穩定拖靶回收。其中,機械臂+穩定拖靶回收方式已經實現空基回收(“小精靈”空基發射/回收無人機項目),其他方式大部分處于概念設計和仿真階段。
現有無人機空基回收技術對比
蜂群無人機空基集群回收與普通的無人機空基回收相比,除了同樣要面對空中紊流、母機流場和自身性能等影響因素,最關鍵的不同點在于蜂群無人機空基回收需要解決“大量”的無人機在短時間內快速回收的問題(中小型無人機在回收階段剩余的航程航時有限)。因此,蜂群無人機空基回收還需要滿足快速、精準、高效的要求。根據蜂群無人機作戰對空基回收要求對以上回收方式進行了梳理、總結和分析對比(見表1)。
蜂群無人機空基回收關鍵技術

回收裝置設計從上文中可以看出,每種回收方式都需要與其配套的回收裝置,回收裝置不但需要實現無人機的回收,還需要使回收區域盡量遠離母機,在保證母機安全的同時,減小回收過程中母機流場的影響。回收裝置還需要克服引導信息誤差、大氣紊流和回收碰撞時產生的過載等問題,最終實現快速、準確、高效、安全的回收無人機。目前典型的無人機空基回收裝置可以分為以下幾類:使用橫桿/繩索的阻攔式回收;基于空中加油技術的穩定錐套式(穩定拖靶)回收;撞網式回收;使用氣壓或者電
磁的吸盤式回收。
回收過程航跡規劃
無人機空基回收航跡規劃需要考慮環境因素(各種威脅因素,禁飛因素,風場大氣因素)和自身性能因素(末端精確引導方式,母機和無人機的最小轉彎半徑、俯仰角、飛行高度、飛行速度等)。在綜合考慮以上影響因素的基礎上建立合理的模型,使用最優規劃算法,使得空間分布的蜂群無人機以最短的時間或最短的距離與母機匯合回收。
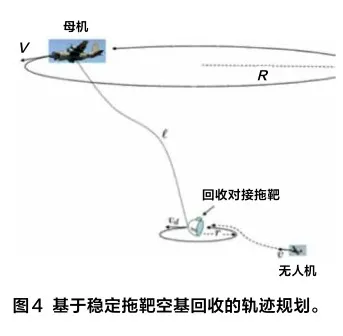
無人機空基回收航跡規劃可分為匯合階段和對接階段,其中無人機與母機的對接階段是一個關鍵難點,這是因為作為母機的運輸機,比如C-130運輸機最小平飛速度在270km/h左右,而旋槳式的小型無人機飛行速度最大約在170km/h左右。因此,當蜂群無人機是螺旋槳式無人機時,母機和無人機速度是無法匹配。目前可行的辦法是Sun L , Beard R W , Colton M B等人提出了一種基于穩定拖靶式空基回收的軌跡規劃方法,通過設置合適的纜繩長度,母機盤旋半徑和飛行速度,使得回收對接拖靶在滿足需要的盤旋半徑和速度下穩定飛行,便于無人機在輔助引導系統的幫助下與其對接。
回收引導技術
無人機空基回收需要克服大氣紊流、母機流場和母機無人機飛行性能的不利影響,需要高精度的引導技術進行數據輔助引導。典型的無人機引導技術主要有:雷達引導、激光引導、差分GPS引導和視覺跟蹤引導等。在母機和無人機向指定空域匯合階段,對測量數據的精度要求不高,只需要工作范圍廣的引導方式(如差分GPS引導)使無人機按照預定航跡到達回收空域。在進入對接階段后,需要高精度的引導方式(如激光、雷達、視覺跟蹤引導)引導無人機與回收裝置對接。因此,無人機空基回收一般使用的是組合式引導技術,數據處理方面一般采用多路(如GPS+視覺跟蹤兩路數據)多源(無人機、母機多路數據)數據融合的方式。
無人機回收控制方法
無人機空基回收的控制方法需要在外界強干擾條件下實現母機與無人機的精確對接,因此需要控制方法具有良好的抗干擾能力、魯棒性和閉環動態特性。由于無人機空基回收過程與無人機自主空中加油的匯合階段、跟蹤對接階段高度相似,因此可以借鑒無人機空中加油的控制方法。國內關于無人機空中自主加油對接控制的研究也比較多,比如Jiang Wang等人的基于L1神經的新型自適應控制方法,李大偉等人的基于粒子群算法的PID整定方法和Campa等人的基于GPS、圖像傳感器融合處理信息的一種魯棒控制器。
結束語
從文獻資料可以看出,目前國內對蜂群無人機空基回收處在起步階段,但回收裝置的設計、回收航跡規劃、回收引導技術和無人機回收控制方法等關鍵技術飛速發展。特別是無人機空基回收技術和無人機空中加油技術有很多相似性,可以相互借鑒,相信不久的將來我國也能夠實現蜂群無人機空基回收。