基于改進粒子群算法的永磁同步電機參數辨識
2023-12-28 08:51:54姜宏昌胡繼勝
微特電機 2023年11期
高 森,王 康,姜宏昌,胡繼勝
(大連交通大學 自動化與電氣工程學院,大連 116028)
0 引 言
永磁同步電動機(以下簡稱PMSM)具有諸多優勢,例如體積小、結構簡單和效率高,在伺服系統及其他工業領域得到廣泛應用[1]。確保電機參數的準確性成為實現PMSM高性能控制不可或缺的前提。然而,電機的電氣參數易受磁飽和、溫度等因素的影響,導致電機控制性能下降[2]。為了實現高效的PMSM控制,準確辨識電機參數變得尤為重要。
綜合國內外研究現狀,傳統的辨識方法主要有:最小二乘法[3-4]、擴展卡爾曼濾波[5-6]、模型參考自適應[7-8]等。最小二乘法需要目標函數對電機參數的導數,易受電機轉速波動和測量噪聲的影響;擴展卡爾曼濾波算法需要進行大量矩陣和矢量運算且需要對電機數學模型進行預處理,過程比較復雜;模型參考自適應法則收斂速度較慢,且自適應律的設計比較復雜,不具備通用性。目前,學者較多使用智能優化算法,與傳統方法相比,智能優化算法具有效率高、魯棒性強和對目標函數要求低等優點。文獻[9]通過將爬山算法與遺傳算法結合,提出了一種局部搜索混合遺傳算法,在PMSM多參數辨識應用中,展示出顯著優勢,比遺傳算法具有更高的精度和收斂速度,但流程較為復雜。文獻[10]提出了一種基于Adaline神經網絡的多參數辨識方法,該方法在精確度方面表現出色,然而其計算負荷相對較大,并且需要離線訓練的過程。作為一種源于群體智能理念的優化算法,粒子群算法(以下簡稱PSO),最初由美國社會計算研究者提出。與其他智能算法相比,它具有收斂速度快、參數少和算法簡單等優點,但其也存在易陷入局部最優、計算量大、運行時間長等缺點。為使PSO算法在PMSM參數辨識領域更好的應用,PSO改進算法相繼提出。文獻[11]提出小生境技術和PSO改進策略結合的PSO算法,文獻[12]提出初始參數優化的混沌變異小生境PSO算法,文獻[13]提出引入高斯衰減和高斯擾動策略的PSO算法,這些改進方案在不同程度上改善了PSO算法的收斂速度和辨識精度。
文獻[14]將混沌映射與高斯擾動策略相結合對PSO算法進行了改進,展現出了優異的全局尋優能力以及出色的魯棒性。本文在這一指導思想下,提出了一種基于混沌映射和高斯擾動改進的PSO算法,對PMSM多參數進行辨識。在慣性權重方面,引入混沌Sine映射,構造了一種非線性隨機遞減慣性權重,按照非線性規律對慣量權重進行降權。為了克服算法后期階段粒子陷入停滯狀態,導致搜索效率下降,采取高斯擾動策略。在收斂速度即粒子速度更新方面,加入高斯擾動,使其不斷搜索最優種群,從而提高了PSO算法的收斂速度和精度。最后利用該算法對PMSM的定子電阻、d,q軸電感和永磁磁鏈進行辨識并通過MATLAB/Simulink仿真,驗證了改進算法的有效性。
1 PMSM數學模型
PMSM具有多變量、非線性、強耦合等特征。采用矢量控制時,為了提高控制精度,獲得良好的調速性能,通常在轉子同步旋轉d,q坐標系下構建電機數學模型,以實現對象的近似解耦。
為了避免各類非理想因素造成電機數學模型復雜化,假設PMSM滿足下列條件:
1)忽略電機鐵心飽和;
2)不計電機的渦流損耗和磁滯損耗;
3)電機采用對稱的三相正弦波交流電。
PMSM在d,q坐標系下的動態電壓方程:
(1)
式中:ud,uq,id,iq分別為定子直交軸電壓和電流分量;Rs,Ld,Lq,ψf分別為定子電阻、直交軸電感和永磁體磁鏈;ωe為轉子電角速度。
在穩態情況下,PMSM的離散電壓方程:
(2)
待辨識參數為Rs,Ld,Lq和ψf4個,而方程的階數為2,此時方程處于欠秩狀態,這會導致算法誤收斂而使辨識結果不準確。為了解決方程階數與辨識參數之間的欠秩問題,當前主要方法是在電機穩態運行后,通過瞬時輸入負序d軸電流(id≠0),以獲得滿秩的電機d,q軸離散方程:
(3)
式中:下標為0的表示控制模式id=0下的變量和參數,無下標0的則表示在控制模式id<0下的變量和參數。
2 改進PSO算法
2.1 標準PSO算法
PSO算法是一種隨機進化的迭代尋優算法,基于人為設計的適應度函數來評估粒子當前所攜帶信息質量,從而引導粒子朝著更高質量的位置移動,最終達到最優解[15]。PSO算法的關鍵在于其兩個核心公式,即粒子速度和位置更新公式,其隨著迭代次數的增加而不斷進行更新,以逐步逼近最優解。
速度更新公式:
(4)
式中:pid為粒子i當前最佳位置;vid,xid分別為粒子i當前飛行速度和位置;gd為整個粒子群全局最佳位置;ω為慣性權重;c1,c2為學習因子,c1是“自我認知”;c2是“社會認知”;r1,r2為[0,1]之間的隨機數;上標k,k+1分別為第k,k+1次迭代。
位置更新公式:
(5)
2.2 改進PSO算法
針對PSO算法出現的問題,本文提出一種改進PSO算法,通過引入混沌映射和高斯擾動,提高了算法的隨機性和搜索能力,避免了陷入局部最優解的問題,簡稱CGPSO算法。首先,CGPSO算法利用混沌映射構造了非線性隨機遞減慣性權重,使得算法在迭代前期能夠快速探索整個空間,而隨著迭代的進行,算法逐漸增強了在局部區域深入搜索的能力,從而提升了穩定性和收斂速度。同時,為了防止算法陷入局部最優解,在算法速度的“個體認知”部分添加高斯擾動項,增加了跳出局部最優的能力。最后利用Sine函數構造非線性異步學習因子,平衡算法的全局開發能力和局部搜索能力。CGPSO算法將慣性權重、學習因子的參數值限定在一定范圍內,降低了參數的敏感性,面對不同情況均能實現良好的追蹤效果。
1)非線性隨機遞減慣性權重
混沌Sine映射作為一種經典的混沌映射,具有良好的遍歷性和隨機性,使算法在前期能夠廣泛地探索搜索空間,同時在后期能夠更加注重局部優化。在算法中引入混沌Sine映射構造非線性隨機遞減慣性權重,改進后的慣性權重表達式如下式:
(6)
式中:k為當前迭代次數;kmax為最大迭代次數;ω(k)為第k次迭代時的權重值;ωinit,ωend為慣性權重的上下限分別為0.9,0.4;S(k)為混沌Sine映射。
混沌慣性權重變化如圖1所示。
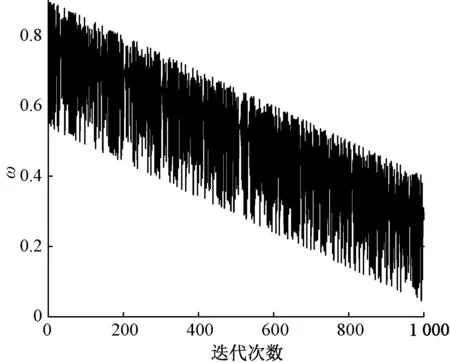
圖1 混沌映射慣性權重
2)高斯擾動
在算法后期,當pid≈gd≈xid發生時,粒子容易陷入停滯狀態,無法繼續學習和探索。此時,算法由于粒子陷于局部最優解的問題,導致收斂速度減慢,甚至無法達到全局最優解[16]]。因此,為了避免算法會陷入局部最優解而造成電機運行性能下降,在粒子速度更新公式的“個體認知”部分增加高斯擾動項,讓算法擁有跳出局部最優解的能力,如下式:
(7)
3)非線性異步學習因子
在算法的初期,粒子應當注重個體經驗,而到了算法后期則應注重群體的經驗。為此,引入Sine函數構造非線性異步學習因子來平衡算法的全局開發能力和局部搜索能力,如下式:
(8)
式中:c1_max,c1_min,c2_max,c2_min為學習因子c1,c2的上下限,分別取值1.5,1,1.5,1。
3 基于CGPSO的PMSM參數辨識
3.1 PMSM參數辨識原理
PMSM參數辨識問題,因其模型已知,所以可以視為尋找最優解的問題。通過比較系統的實際輸出和可調模型的輸出之間的差值,通過逐步優化的方式逼近最小化適應度函數的目標,從而修正可調模型的參數,實現對系統真實參數的辨識。圖2為基于CGPSO的PMSM參數辨識原理框圖。
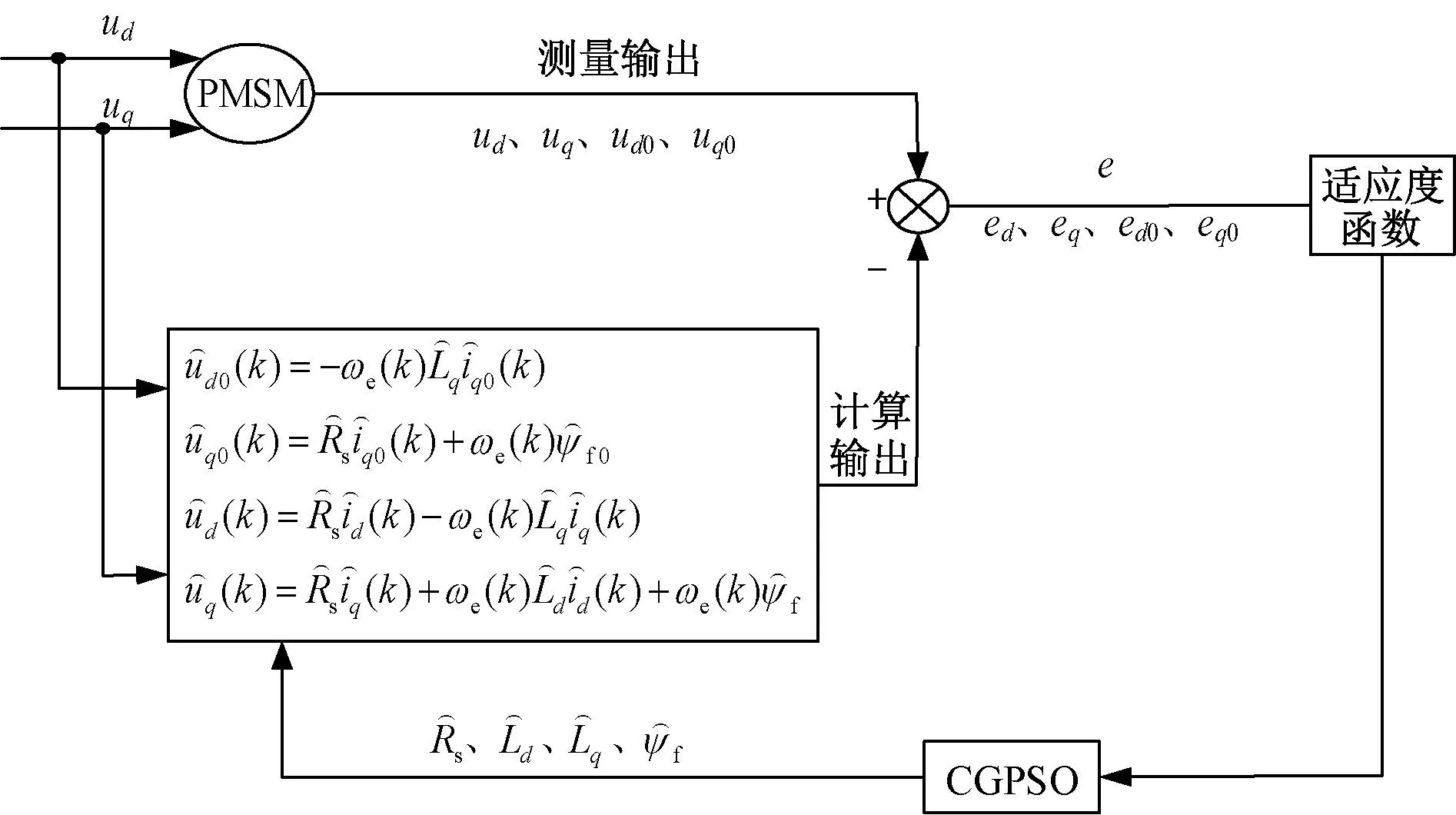
圖2 基于CGPSO算法的PMSM參數辨識原理
由圖2可見,通過構建的適應度函數對實際模型和理想模型兩者在相同輸入條件下的輸出差異進行評估,并通過CGPSO辨識器對待辨識參數進行修正,重復上述優化過程直至達到預設要求,從而辨識出系統真實參數。
3.2 適應度函數
根據PMSM在同步旋轉坐標系下的狀態方程式(1)~式(3),定義算法的適應度函數:

(9)
式中:ω1,ω2,ω3和ω4為適應度函數的加權因子,代表各個分量的重要程度。
3.3 CGPSO算法的PMSM參數辨識步驟
Step1:數據采集
當電機在兩種模式下(id=0和id<0)穩態運行時采集相關數據,包括交直軸電壓、電流以及轉子電角速度,并保存在工作區。
Step2:參數初始化
設定待辨識參數Rs,Ld,Lq和ψf的范圍,為每個粒子隨機設置初始速度和位置,并對算法中所需相關參數進行設置。
Step3:適應度評估
針對每個粒子,通過計算其適應度值,進行個體最優解pid和全局最優解gd的比較與更新,來判斷粒子在逐步搜索中是否接近最優解。
Step4:速度和位置更新
根據當前的速度和位置,通過式(7)和式(5)更新計算每個粒子下一步的速度和位置。
Step5:最優解更新
通過比較每個粒子的當前適應度值與其個體歷史最優適應度值來確定是否需要更新個體最優解。同時,也將評估所有粒子的歷史最優適應度值與整個粒子群歷史最優適應度值之間的關系,以便更新群體最優解。若個體最優解pid大于群體最優解gd,則后者取代前者。
Step6:終止條件判定
評估是否達到預設要求,若是達到預定的最大迭代次數或足夠接近最優解的閾值,則終止條件,轉到Step8;否則,繼續下一步。
Step7:迭代
回到Step3,繼續進行適應度評估、更新速度和位置、更新最優解等步驟。
Step8:輸出結果
當滿足終止條件時,輸出整個粒子群體歷史最優解作為最終的參數辨識結果。
基于CGPSO算法的PMSM參數辨識流程如圖3所示。

圖3 基于CGPSO算法的PMSM參數辨識流程
4 仿真驗證和結果分析
4.1 仿真設置
為了實現參數辨識系統對電機驅動系統的輸入信息獲取,需要對其進行數據采樣,包括交直軸電壓、電流分量以及轉子電角速度。本文在MATLAB/Simulink平臺上搭建基于CGPSO算法的PMSM參數辨識仿真模型,如圖4所示。
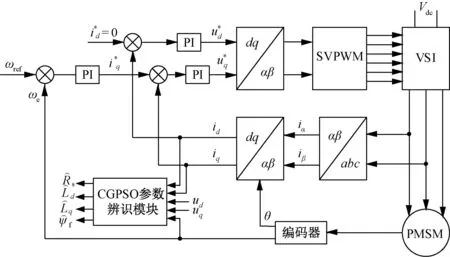
圖4 基于CGPSO算法的PMSM參數辨識仿真框圖
在仿真實驗中,電機運行工況設置:電機負載轉矩設置為10 N·m,轉速設置為1 000 r/min。采用id=0的矢量控制,在電流穩定時注入d軸負序電流(id=-2 A),進行電機信息采樣,并將數據保存在MATLAB的工作區中。為使結果有對比性,將CGPSO算法與標準PSO算法、慣性權重線性變化的粒子群算法(LPSO)、自適應粒子群算法(APSO)進行對比。為了確保仿真分析的合理性,粒子個數全部設置為500,迭代次數為300。由于單次運行結果可能存在一定的偶然性,因此將上述算法辨識電機參數仿真實驗分別運行30次,以降低對測試結果產生的隨機干擾,并將其平均值作為最終結果,以此提高仿真結果的穩定性和可靠性。
仿真系統中PMSM參數如表1所示。
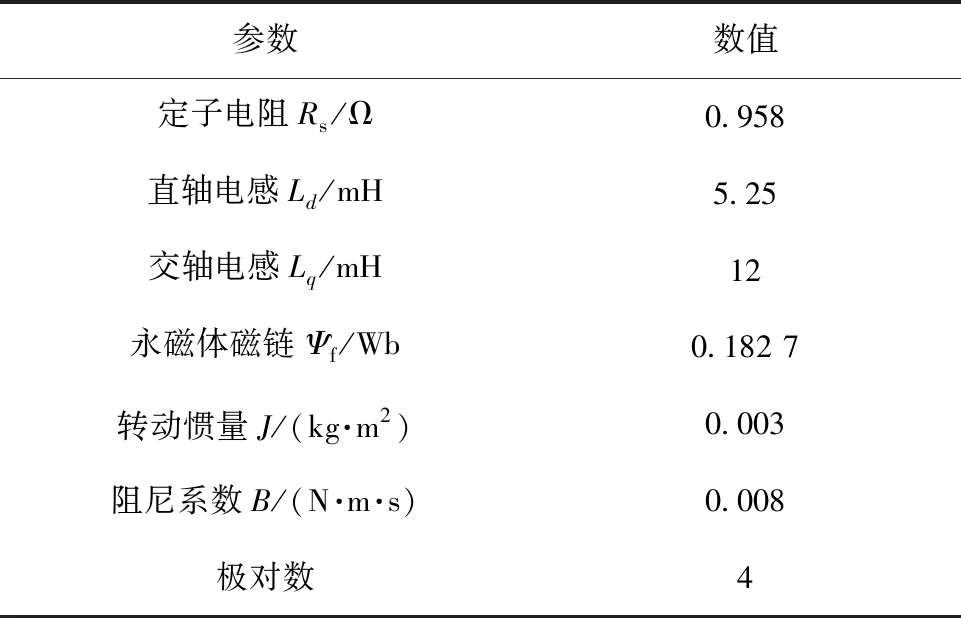
表1 仿真系統中PMSM參數
4.2 仿真結果分析
采用上述算法對PMSM參數進行辨識,辨識結果如表2所示。
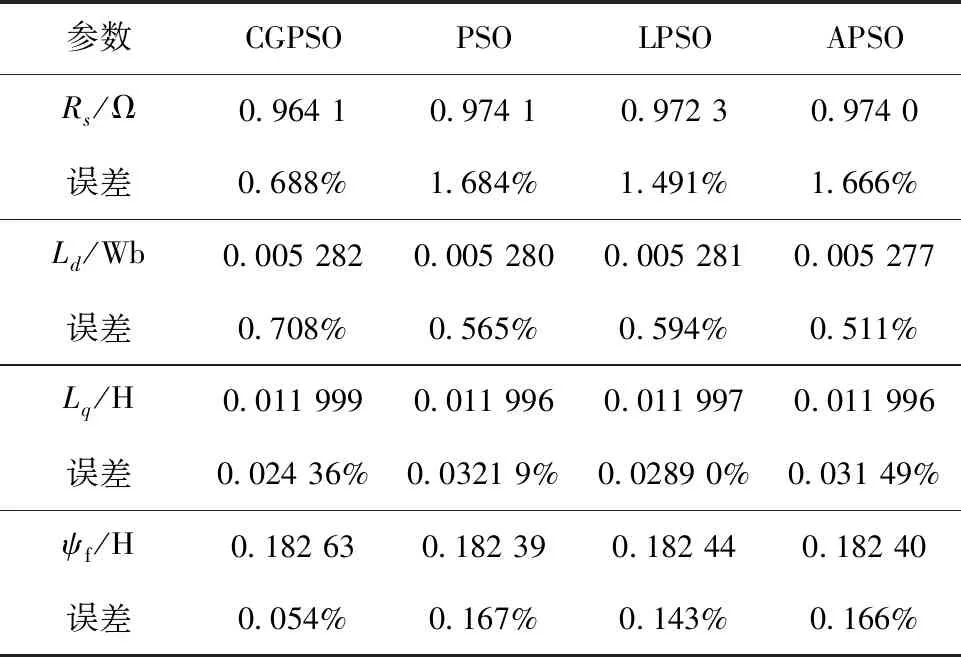
表2 PMSM參數辨識結果
由表2數據可知,采用CGPSO算法對PMSM參數進行辨識時,誤差普遍較小,體現了其在擺脫局部最優解以及提高參數辨識精度方面卓越的表現。相比其他算法,CGPSO算法在全局搜索和局部優化方面展現出更為強大的潛力,使其在PMSM參數辨識任務中表現更佳。
圖5為各參數在4種算法下的適應度值收斂曲線。由圖5可見,CGPSO算法收斂速度最快。這表明CGPSO算法相較于其他算法擁有更快的收斂速度和更高的效率,在較少的迭代次數內就能夠取得令人滿意的優化結果。
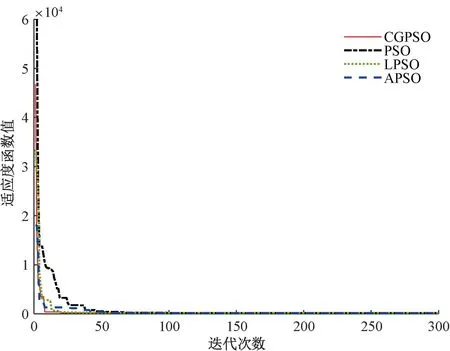
圖5 PMSM多參數辨識適應度變化曲線
圖6為在CGPSO算法下定子電阻Rs、直軸電感Ld、交軸電感Lq和永磁體磁鏈ψf收斂過程。
由圖6可知,在應用CGPSO算法進行PMSM多參數辨識時,各參數的辨識結果呈現出與真實值接近的高精度表現,同時也凸顯了其出色的收斂性能。這表明CGPSO算法在解決PMSM參數辨識問題上具備明顯的優勢,為一種可靠且高效的解決途徑。
5 結 語
本文利用PSO算法的性能,引入混沌Sine映射構造非線性隨機遞減策略來計算慣性權重,使算法在前期階段能夠快速探索整個空間,而在后期階段擁有較強的局部搜索能力。同時在粒子速度更新公式中加入高斯擾動,以提高粒子搜索效率,增加了其跳出局部最優的能力,并利用Sine函數構造非線性異步學習因子,平衡了全局開發和局部搜索能力,形成了基于混沌映射和高斯擾動策略改進的粒子群算法。將改進算法應用于PMSM的電氣參數辨識,仿真結果表明,該算法在PMSM參數辨識問題上具有顯著的優勢,相較于一般PSO算法擁有更快的收斂速度和更高的辨識精度,為PMSM參數辨識提供了一種可靠且有效的解決方案。
