基于機器視覺的變電站危險區(qū)域作業(yè)風險監(jiān)測預警
2023-12-28 06:51:48馮蕾
通信電源技術 2023年20期
馮 蕾
(貴州電網有限責任公司貴陽供電局,貴州 貴陽 550001)
0 引 言
在變電站的正常作業(yè)中,變電站檢修是保障電網運行的最為重要的一環(huán),為避免變電站設備出現(xiàn)故障,保證變電站的正常運行,部分智能化的監(jiān)測和巡查方法已經開始在變電站中應用[1-2]。其中,視頻智能監(jiān)控、機器人智能巡檢、紅外熱像儀監(jiān)控等技術在各個方面的應用已趨近于成熟,但并不能取代技術人員的維護工作[3]。據相關文件可知,如果設備在運行中出現(xiàn)了故障,則需要工作人員到現(xiàn)場進行事故的排查與應急處理[4]。一旦場所中電力設備的運行出現(xiàn)失控現(xiàn)象,則將導致現(xiàn)場人員面臨生命安全問題。在變電站危險區(qū)域的作業(yè)中,實時監(jiān)控并確定維護人員的位置,可以有效增強維護人員的人身安全。為解決上述問題,本文將在研究中引進機器視覺技術,開展變電站危險區(qū)域作業(yè)風險監(jiān)測預警方法的設計研究,為變電站管理人員的現(xiàn)場作業(yè)提供幫助。
1 變電站電氣設備的運行監(jiān)測
為滿足變電站危險區(qū)域的作業(yè)風險監(jiān)測預警需求,設計變電站中電氣設備在運行過程中的監(jiān)測。根據變電站風險作業(yè)區(qū)域的分布,為滿足監(jiān)測過程中的相關需求,使用紅外電荷耦合元件(Charge Coupled Device,CCD)攝像裝置采集變電站現(xiàn)場作業(yè)圖像,建立傳感器終端與電氣設備運行接口之間的連接。通過此種方式,實現(xiàn)對變電站電氣設備運行的監(jiān)測,此過程用計算公式表示為
式中:D為變電站電氣設備運行的監(jiān)測反饋數據;ΔI為電氣設備在變電站中所處的空間位置;v為監(jiān)測中的收斂條件;s為電氣設備的作業(yè)條件。按照式(1),完成變電站電氣設備運行的監(jiān)測。
2 基于機器視覺的變電站作業(yè)區(qū)域背景建模
在上述設計內容的基礎上,考慮通過上述方式獲取的電氣設備監(jiān)測信息可能與實際情況存在一定的偏差,因此在完成監(jiān)測后,根據變電站的實際情況引進機器視覺技術,進行變電站作業(yè)區(qū)域背景的建模。建模時,需要先在計算機中錄入變電站的電氣設備監(jiān)測信息,將其作為建模的序列樣本[5]。根據電氣設備作業(yè)的覆蓋范圍,圈定傳感器可感知或監(jiān)測的范圍,將一個圖像劃分成為N×N的網格,每一個網格作為一個視覺成像區(qū)域,數據的采樣時間表示為t,在t時刻內,第i個網格對應的電氣設備運行監(jiān)測圖像像素組表示為Gi(t),對應區(qū)域的像素灰度值表示為Mj(t)。以此為依據,即可進行變電站作業(yè)區(qū)域背景的建模,此過程用計算公式表示為
式中:Ki(t)為變電站作業(yè)區(qū)域的背景模型;j為第j個像素值。在上述內容的基礎上,考慮到作業(yè)區(qū)域中電氣設備的運行狀態(tài)并非一成不變,即模型會根據電氣設備的運行狀態(tài)進行更新。此過程用計算公式表示為
式中:δ為模型更新系數。按照上述方式,完成基于機器視覺的變電站作業(yè)區(qū)域背景建模。
3 區(qū)域危險點特征匹配與風險預警
完成上述研究后,提取空間中的尺度特征點,設定不同電氣設備作業(yè)過程中的行為閾值,以此為依據進行區(qū)域危險點的特征匹配。在此過程中,使用高斯濾波器,對區(qū)域內的采樣圖像進行卷積運算,根據圖像中的算子篩選特征點,將其與區(qū)域內的危險點進行特征匹配,此過程用計算公式表示為
式中:α為區(qū)域危險點的特征匹配度;(x,y)為圖像在空間的像素值;σ為監(jiān)測圖像的空間尺度;g表示高斯濾波器;k表示尺度空間對應的倍數;C(x,y)表示鄰域特征點的空間尺度。按照上述方式進行區(qū)域危險點特征的匹配,根據不同電氣設備在運行過程中的危險程度、出現(xiàn)故障后影響的變電站異常范圍等,設定不同區(qū)域危險點的特征匹配閾值。當匹配后α>閾值時,說明變電站內存在觸發(fā)危險區(qū)域作業(yè)風險的行為,此時變電站監(jiān)控終端將主動進行該區(qū)域的預警,反之則不觸發(fā)預警。
4 對比實驗
上文從3 個方面引進機器視覺技術,完成了危險區(qū)域作業(yè)風險監(jiān)測預警方法的設計。為實現(xiàn)對此方法在實際應用中監(jiān)測效果的檢驗,選擇某地區(qū)的大型變電站作為此次實驗研究的試點場所。在此過程中,根據變電站中電氣設備的作為方式、場所綜合部署進行變電站現(xiàn)場危險區(qū)域的圈定,圈定前按照規(guī)范設計危險區(qū)域的劃分與識別條件,相關內容如表1 所示。

表1 變電站危險區(qū)域的劃分與識別條件
上述提出的不安全區(qū)域一旦在變電站運行中出現(xiàn)操作不當等現(xiàn)象,十分容易出現(xiàn)作業(yè)人員觸電、現(xiàn)場爆炸、大規(guī)模停電斷電等事故。為解決以上問題,在與變電站相關負責人商議后,決定使用本文設計的方法進行變電站危險區(qū)域的作業(yè)風險監(jiān)測預警。監(jiān)測預警前,進行變電站現(xiàn)場實驗環(huán)境的構建,相關內容如圖1 所示。
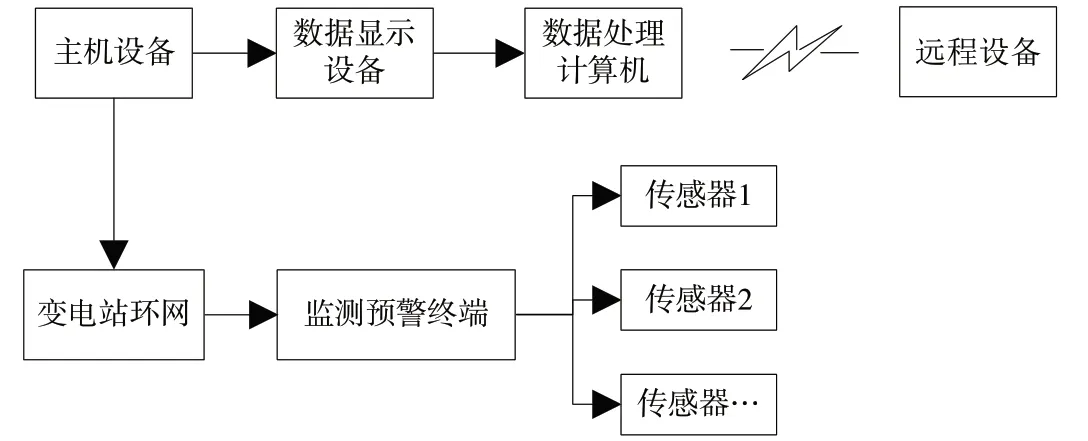
圖1 變電站現(xiàn)場實驗環(huán)境的構建
如圖1 所示,在此基礎上引進機器視覺技術,建立變電站中電氣設備與監(jiān)控終端之間的連接,以此方式實現(xiàn)對變電站電氣設備運行的監(jiān)測。同時,進行變電站作業(yè)區(qū)域前景與候選背景建模,通過對區(qū)域危險點特征的匹配,實現(xiàn)對危險區(qū)域作業(yè)風險的預警。
完成本文方法在測試環(huán)境中的應用后,引進基于模型修正的作業(yè)風險監(jiān)測預警方法、基于物聯(lián)網的作業(yè)風險監(jiān)測預警方法,作為傳統(tǒng)方法1、2,使用3種方法進行變電站危險區(qū)域的作業(yè)風險監(jiān)測預警。
將變電站危險區(qū)域中出現(xiàn)的實際風險作業(yè)行為發(fā)生次數與終端預警次數作為評價指標,根據監(jiān)測預警終端的記錄結果,統(tǒng)計3 種方法對于變電站危險區(qū)域作業(yè)風險的監(jiān)測預警情況,結果如表2 所示。
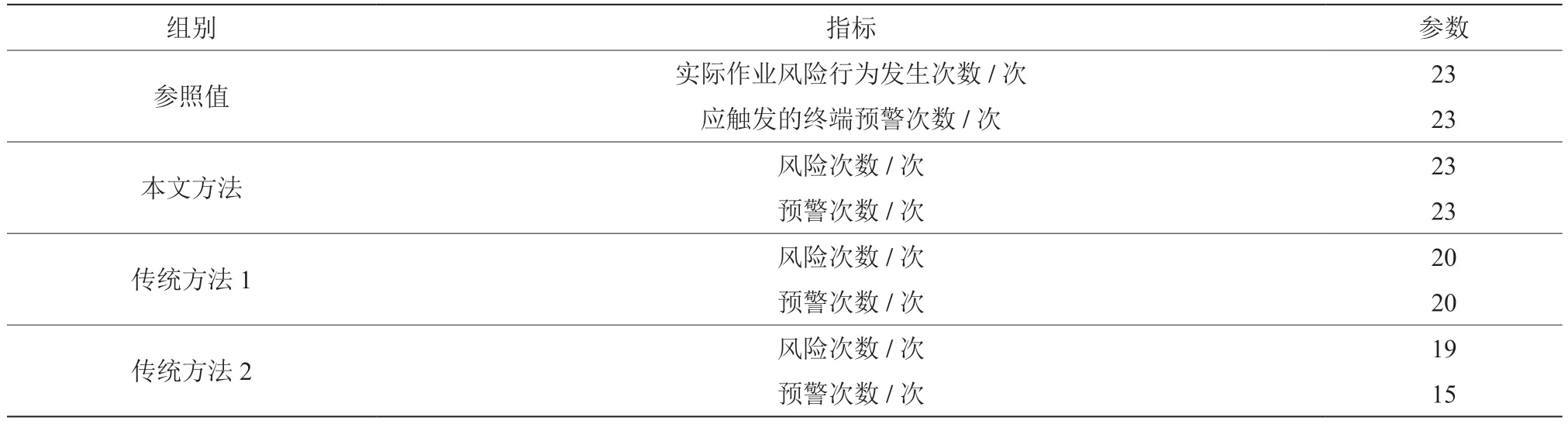
表2 變電站危險區(qū)域的作業(yè)風險監(jiān)測預警結果
變電站中,每發(fā)生一次危險區(qū)域作業(yè)風險行為,便會觸發(fā)一次終端預警,因此變電站作業(yè)風險行為發(fā)生次數與觸發(fā)的終端預警次數應呈現(xiàn)對等狀態(tài)。在已知變電站危險區(qū)域作業(yè)風險行為發(fā)生次數與應觸發(fā)終端預警次數的基礎上,使用3 種方法進行變電站風險的監(jiān)測預警。根據上述表2 所示的實驗結果可以看出,3 種方法中,只有本文方法在實際應用中可以確保識別的風險次數和風險預警次數與參照值一致,而傳統(tǒng)方法無法實現(xiàn)對變電站危險區(qū)域作業(yè)風險的精準監(jiān)測與預警。綜合上述實驗結果,得到如下所示的結論:相比傳統(tǒng)方法,本文設計的基于機器視覺技術的風險監(jiān)測預警方法的實際應用效果良好,可以在精準識別變電站危險區(qū)域作業(yè)風險的同時,實現(xiàn)對風險的及時預警,避免變電站運維管理等技術人員誤入危險區(qū)域并發(fā)生安全風險事故,提高變電站作業(yè)的安全性,為其穩(wěn)定運行提供技術保障。
5 結 論
電力系統(tǒng)在全國的能源供應中不僅可給系統(tǒng)末端用戶提供良好、優(yōu)質的供電服務,還可保障經濟市場內企業(yè)的持續(xù)發(fā)展。變電站維護工作是保障電網穩(wěn)定運行的高危性工作。為避免事故,本文引進機器視覺技術,通過變電站電氣設備運行監(jiān)測、變電站作業(yè)區(qū)域前景與候選背景建模、區(qū)域危險點特征匹配與風險預警,開展變電站危險區(qū)域作業(yè)風險監(jiān)測預警方法的設計研究,通過對比實驗證明可以精準識別變電站危險區(qū)域的作業(yè)風險,保證及時預警。
猜你喜歡
少年博覽·初中版(2020年6期)2020-06-12 11:42:23
電子制作(2018年8期)2018-06-26 06:43:34
電子制作(2017年8期)2017-06-05 09:36:15
故事大王(2016年7期)2016-09-22 17:30:08
現(xiàn)代工業(yè)經濟和信息化(2016年5期)2016-05-17 05:35:57
中國科技博覽(2016年2期)2016-04-25 20:32:39
小學生導刊(2016年34期)2016-04-11 00:49:44
河南電力(2015年5期)2015-06-08 06:01:45
電測與儀表(2015年5期)2015-04-09 11:30:52
兒童故事畫報(2013年3期)2013-06-24 05:40:30