鍍銀聚酰胺6/聚酰胺6納米纖維包芯紗電容傳感器的構筑
2023-12-24 10:33:16范夢晶吳玲婭周歆如洪劍寒
紡織學報 2023年11期
范夢晶, 吳玲婭, 周歆如, 洪劍寒,2, 韓 瀟,2, 王 建,2
(1. 紹興文理學院 紡織服裝學院, 浙江 紹興 312000;2. 浙江省清潔染整技術研究重點實驗室, 浙江 紹興 312000)
隨著可穿戴技術與智能材料的不斷發展,新型柔性傳感器逐漸受到廣泛關注,因其具有質輕、成本低、服用性佳、應用方便廣泛且高效的特點,在體育運動、生物醫療、人機交互等領域應用前景廣闊[1-2]。
柔性電容傳感器是一種基于柔性化平行電極板結構的傳感器,傳感機制即當其受到外部機械壓力時,會引起兩極板間距離和相對面積的變化,從而產生電容信號的變化。此類傳感器具有結構簡單、制作方便、靈敏性好,且性能穩定等優點[3],是目前柔性可穿戴器件研究領域常見的傳感器之一。關于電容式柔性傳感器的研究成果有很多,一方面集中于電極和介電層微結構的設計[4-5],另一方面是針對傳感器整體結構的設計組裝。截至目前,柔性電容傳感器的整體結構主要以三維的三明治結構和二維的編織結構為主。前者因其三層結構而需要較大的面積與厚度,限制了傳感器的小型化與可穿戴性[6-8]。后者較前者更易實現小型化,可穿戴性也大大提高,但受限于傳感器內紗線電極的十字交叉排列,其外形一般為規整的矩形結構,不適用于非規整結構的需求[9-10]。一維結構的紗線狀或纖維狀電容傳感器,以其更為靈活的結構設計能力和可植入性,將具備更為廣闊的應用前景。
一維線狀結構的電容式柔性傳感器的制備方法主要是在導電紗線表面,通過涂覆、原位聚合等后處理方法附著介電層,然后根據電容器原理組裝形成。例如,Liu等[11]組裝了以橡膠纖維為芯紗,碳納米管為皮層的多層循環包覆的碳納米管/橡膠/碳納米管/橡膠柔性電容式傳感器。但這種組裝方式存在制備工藝復雜、紗線導電層外露易脫落等缺陷。通過靜電紡絲技術在導電紗線表面包覆納米纖維層,形成的納米纖維絕緣包覆層能夠保護導電層并充當電容式傳感器中的介電層。佑曉露[12]通過靜電紡絲技術,在鍍鎳棉紗表面包覆聚氨脂(PU)納米纖維制備納米纖維包芯紗,并將2根包芯紗加捻制成股線,鎳層作為電極板、PU納米纖維層作為介電層制備了電容式柔性傳感器。但股線結構的傳感器單位長度內2個極板的正對面積相對較小,電容器的電容值較小;同時無論是在其長度方向,還是在直徑方向受外力作用時的形變都很小,限制了其在大應變下的應用。
為此,本文采用自主開發的水浴靜電紡絲法,在鍍銀聚酰胺6(SCN)芯紗上包覆聚酰胺6(PA6)納米纖維,制得SCN/PA6納米纖維包芯紗,并將其纏繞在橡筋上,制備以橡筋為應變載體,以鍍銀錦綸為電極板,以納米纖維包覆層為介電層的大應變線形螺旋結構柔性電容傳感器,研究了其電容傳感性能,并將其應用于人體運動的監測,為柔性傳感器的研究提供參考。
1 實驗部分
1.1 實驗材料與儀器
材料:鍍銀聚酰胺6纖維(線密度27 tex(48 f))、橡筋(直徑為2 mm),市售;聚酰胺6(PA6)粉末,分析純,美國杜邦公司;88%甲酸,上海展云化工有限公司;平平加O,分析純,江蘇海安石油化工廠;純藍墨水,上海精細文化用品有限公司。
儀器:SU3800掃描電子顯微鏡,日本日立公司;Instron3365萬能材料試驗機,美國英斯特朗公司;同惠TH2830電容測試儀,常州同惠電子有限公司。
1.2 PA6納米纖維包芯紗的制備
取適量的PA6粉末溶解于甲酸溶液中,經過充分攪拌得到質量分數為12%的靜電紡絲液。將適量平平加O溶解于去離子水中,得到質量分數為0.8%的溶液,作為靜電紡絲納米纖維的接收浴。
自制納米纖維包芯紗裝置如圖1所示。主要由高壓電源、數字注射器、水浴槽、烘干裝置、卷繞裝置等部分組成。芯紗SCN先從右側的卷取輥上退繞,從水浴槽的上表面通過,水浴槽內盛有與槽面平行的平平加O液體,上方為一組4個水平排列的靜電紡絲針頭,針頭與注射器之間通過軟管進行連接,同時針頭與接收浴之間形成高壓電場,由注射器射出的PA6紡絲液在高壓電場的作用下,被牽伸成納米纖維沉積在芯紗表面;后經過烘干裝置,被卷繞在左側的卷取輥上,最終得到SCN/PA6納米纖維包芯紗。本文實驗中,紡絲液質量分數為12%,靜電電壓為20 kV,噴絲速率為0.2 mL/h,芯紗卷繞速度為0.16 m/min,接收距離為5 cm。
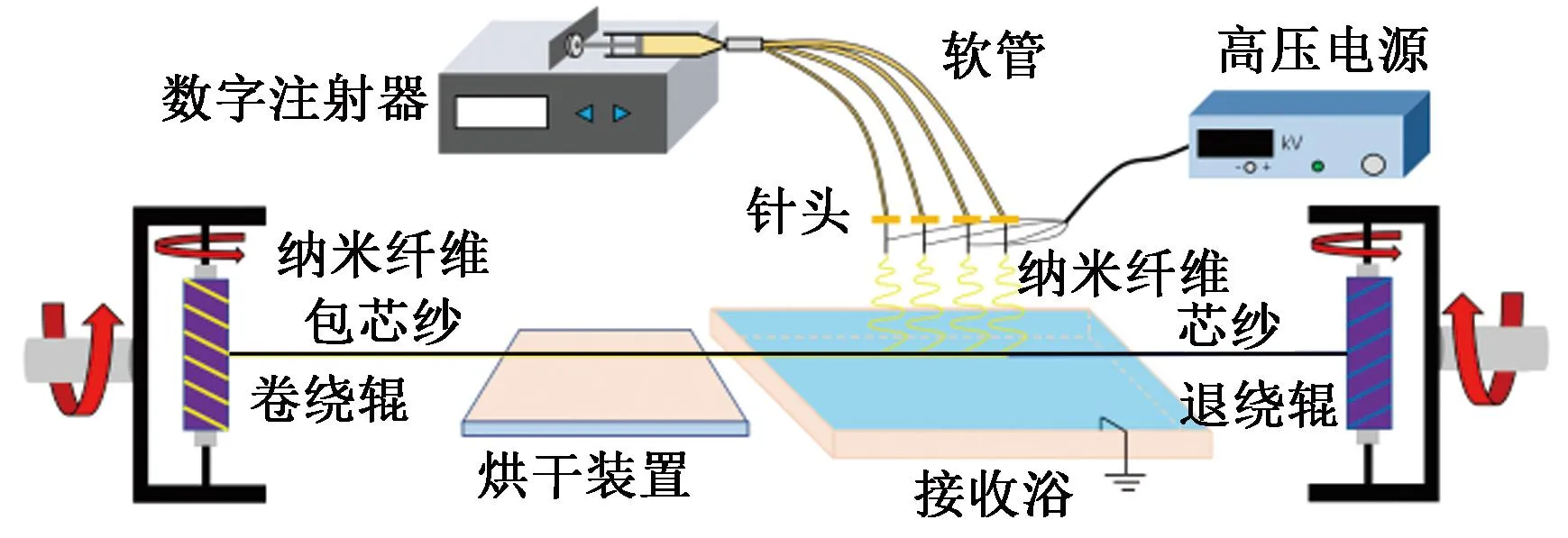
圖1 水浴靜電紡絲裝置示意圖
1.3 應變-電容傳感器的制備
將制備好的納米纖維包芯紗分成2份,一份用純藍墨水進行染色以作顏色區分,染色時間為1 h,染色溫度為30 ℃。將染色后的紗線放入烘箱中進行烘干。將藍色包芯紗和白色包芯紗以并列形式卷繞到橡筋上,制備螺旋結構柔性電容傳感器。紗線卷繞密度為20圈/cm,纏繞部分長度為15 cm,如圖2所示。

圖2 應變-電容傳感器的制備過程
1.4 測試與表征
1.4.1 形貌觀察
將納米纖維包芯紗固定在試樣臺上并進行噴金處理,然后采用掃描電子顯微鏡觀察其表面和截面形貌。從掃描電鏡照片中隨機選取50根納米纖維,用Image Pro Plus 6.0圖像處理軟件測試納米纖維直徑。
1.4.2 力學性能測試
采用萬能材料試驗機分別對納米纖維包芯紗和芯紗進行力學性能測試。試樣夾持長度為250 mm,拉伸速度為250 mm/min。
1.4.3 傳感性能測試
柔性應變傳感器性能測試裝置以及固定方式如圖3所示。將傳感器兩端固定在拉伸測試儀的上下夾板中,夾板下的部分為未經紗線纏繞的橡筋。
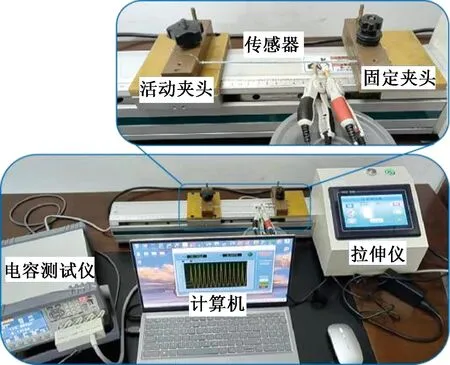
圖3 應變-電容傳感器的傳感性能測試裝置
從傳感器一側上退繞出一定長度藍色和白色的納米纖維包芯紗,并將外層PA6納米纖維剝落至露出SCN芯層,分別使用導電膠布粘合,通過測試夾頭連接傳感器和電容測試儀。
根據電容測試儀檢測到的在不同拉伸距離和拉伸速度下的實時電容值,得到相對電容(Cp/C0)-時間曲線(其中:Cp為拉伸過程中傳感器的實時電容;C0為傳感器未經拉伸時的初始電容值(根據測試,在未拉伸狀態下傳感器的C0為220 pF)),來表示傳感器的電容變化情況。
1.4.4 應變-電容傳感器的人體運動監測
測試者膝蓋伸直,將柔性傳感器兩端未纏繞納米纖維包芯紗的部分用魔術貼固定在測試者膝蓋上下的大腿與小腿上。將2根納米纖維包芯紗一端表面的納米層剝落以露出內層芯紗,分別貼上導電膠布通過測試夾頭與電容測試儀連接。測試者進行膝蓋間歇、連續彎曲,以及在跑步機上以不同速度行走等運動,由電容測試儀實時記錄運動過程中傳感器的電容變化。
2 結果與分析
2.1 表面形貌分析
納米纖維包芯紗的截面和表面形貌結構如圖4所示。由圖4(a)可看出,鍍銀錦綸表面生成了完整的包覆層,其厚度為15~20 μm,呈現明顯的皮芯結構。進一步觀察包覆層結構(見圖4(b))可以看出,包覆層由納米尺度的纖維組成。納米纖維的直徑分布在70~130 nm之間,其中60%的直徑分布在80~100 nm之間,平均直徑為95.53 nm,直徑分布較為均勻(見圖5)。

圖4 SCN/PA6納米纖維包芯紗的形貌

圖5 SCN/PA6納米纖維直徑分布
2.2 力學性能分析
納米纖維包芯紗和芯紗的負荷-伸長曲線如圖6所示。納米纖維包芯紗的斷裂強力和斷裂伸長率分別為9.50 N和42.33%,芯紗的分別為9.20 N和44.67%。與芯紗相比,包芯紗的斷裂強力稍有增大,而斷裂伸長率略有減小,但變化幅度都很小。前期研究表明,芯紗表面納米纖維包覆層的強力較低,對芯紗的強力不能提供有效的增強效果,納米纖維包芯紗斷裂強力略有提升主要是由于納米纖維包覆于芯紗外,有效提高了芯紗的集束性,導致芯紗的各根纖維在拉伸時的斷裂同時性增強[13-14]。同時還可以看出,在拉伸的初始階段,納米纖維包芯紗負荷-伸長曲線的斜率較芯紗高,說明其初始彈性模量比芯紗高。

圖6 納米纖維包芯紗和芯紗的負荷-伸長曲線
2.3 傳感性能分析
2.3.1 拉伸距離對傳感性能的影響
固定拉伸速度為12 mm/s,改變拉伸距離分別為1、2、3、4、5、6、7、8、9和10 cm(伸長率分別為6.67%、13.33%、20.00%、26.67%、33.33%、40.00%、46.67%、53.33%、60.00%和66.67%),研究拉伸距離對傳感器傳感性能的影響,結果如圖7所示。其中各條曲線的左半部分為拉伸階段電容變化情況,右半部分為回復階段電容變化情況。從圖7可以看出,在傳感器拉伸階段,其電容值減小,回復階段則相反。
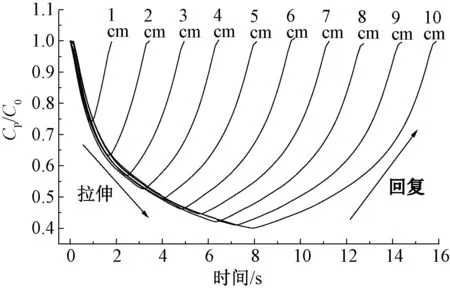
圖7 拉伸距離對傳感器相對電容值的影響
根據電容的計算公式C=εS/d(ε為介電常數;S為電容極板的正對面積,cm2;d為電容極板間的距離,cm)可知,電容器的電容值與極板正對面積成正比,與極板間距成反比。本文線狀電容傳感器的傳感原理如圖8所示。2組納米纖維包芯紗可視為2個平行排列的極板,其正對面積相對穩定,隨著拉伸的進行,2組紗線之間的隔距增大,即極板間距增大,因此電容值減小,回復時則相反。

圖8 應變-電容傳感器傳感原理
線性度是傳感器的一項重要指標。以傳感器的伸長率為自變量(x),以Cp/C0為因變量(y),對圖7拉伸階段的曲線進行線形擬合(需將圖中橫坐標的時間根據拉伸速度換算成伸長率),結果如表1所示。可以看出,在伸長率為6.67%時,擬合方程的相關系數r為0.988 6,非常接近1,說明在伸長率較小時,伸長率與Cp/C0表現出良好的線性關系。而隨著伸長率的不斷增大,r值逐漸減小,伸長率為66.67%時,其值降至0.905 2,線性度較弱。
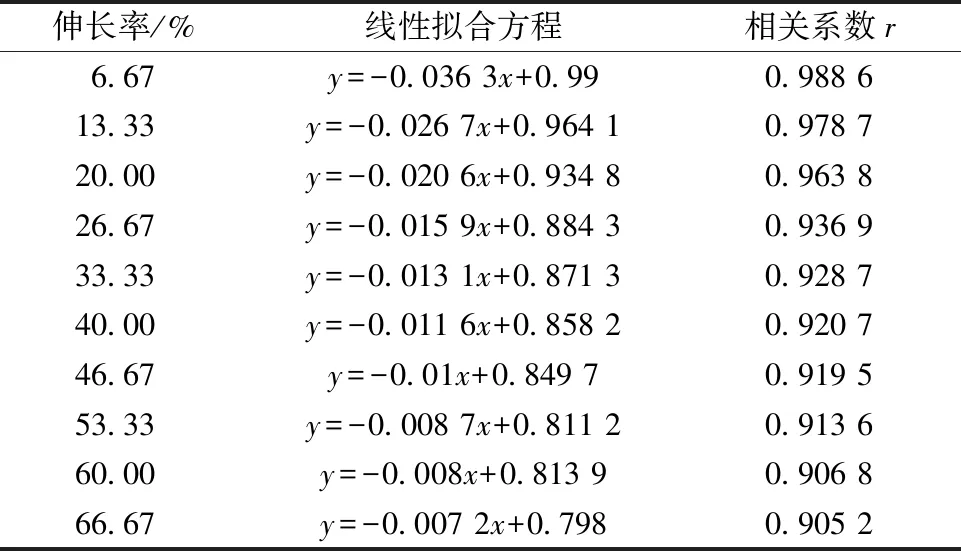
表1 線形擬合方程
敏感度是傳感器的另一項重要指標。從圖7可以看出,隨著伸長率的增大,電容器最低電容值減小的趨勢逐漸減緩。傳感器敏感系數GGF的計算式為
式中:GGF為敏感系數;ΔCp為相對電容變化值;L0和ΔL分別為試樣原長和長度變化值,cm。
根據公式對傳感器拉伸過程進行定量分析,計算出傳感器在不同伸長率下的敏感系數如表2所示。可以看出,在伸長率為6.67%時,敏感系數可達3.93,隨著伸長率的增大,敏感系數不斷減小,伸長率為66.67%時僅為0.90。這是因為傳感器在拉伸的起始階段,橡筋上纏繞的納米纖維包芯紗的間距(極板間距)的相對位置變化較快,因此在伸長率較小時,其電容值變化較快,敏感度較高。而隨著伸長率逐漸變大,極板間距的相對位置變化緩慢,則電容值變化緩慢,因此,隨著伸長率的不斷增大,其敏感度逐漸變小。

表2 傳感器在不同伸長率下的敏感系數
重復性也是傳感器的一項重要指標。對傳感器在不同伸長率下進行循環拉伸450 s,其電容變化如圖9所示。可以看出,不同伸長率下的最高和最低Cp/C0值稍有波動,這是因為纏繞在橡筋上的納米纖維包芯紗(極板)在往復的拉伸作用下,每次所在位置會有所不同,導致極板間距有微小的差異所造成的。但是仍可看出,在不同伸長率下,其最高Cp/C0值均在1左右,最低Cp/C0值與單次拉伸時的最低Cp/C0值(見表2)接近,表現出良好的重復性。
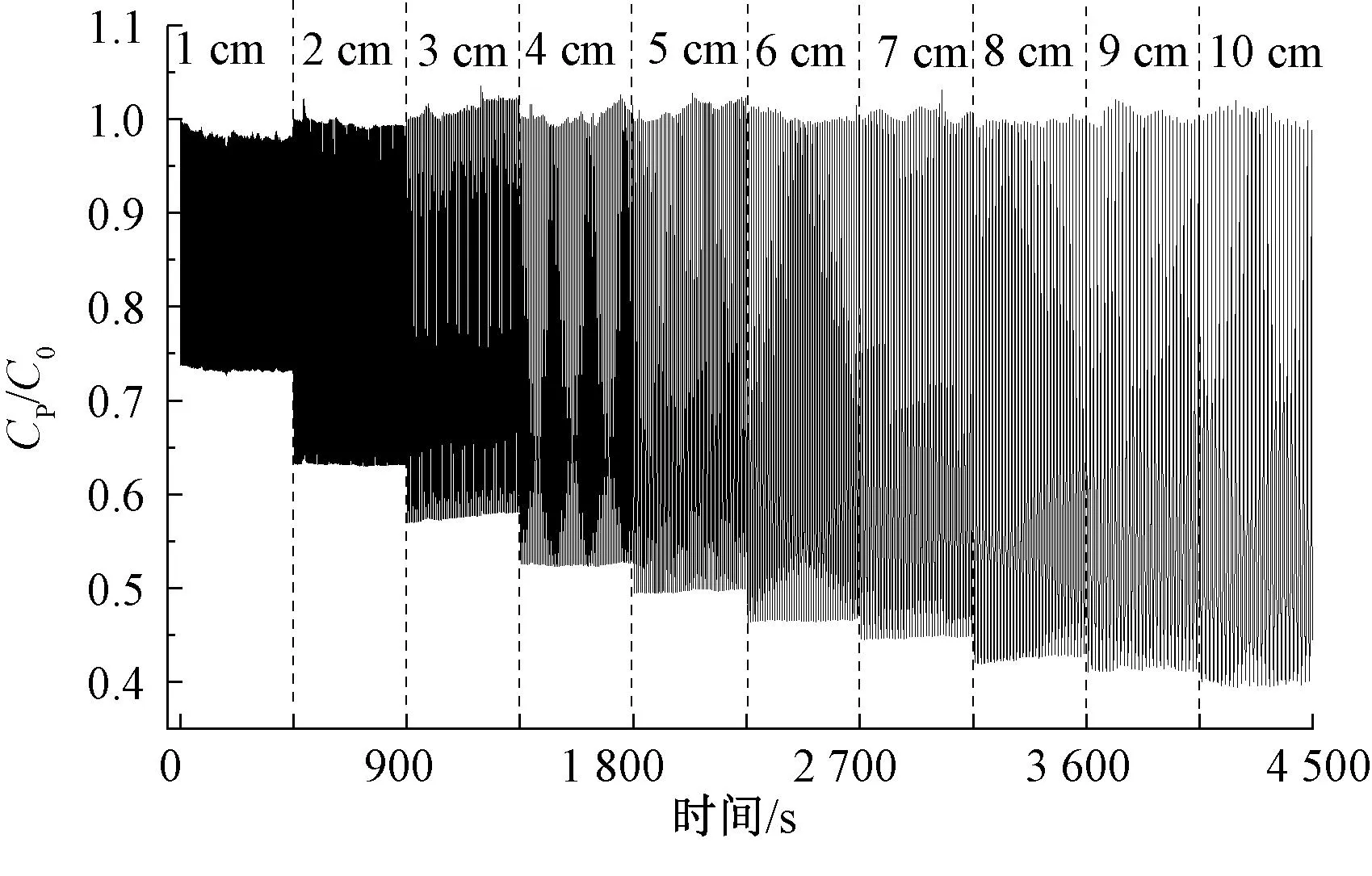
圖9 傳感器拉伸循環重復穩定性
2.3.2 拉伸速度對傳感性能的影響
固定伸長率為40%,改變拉伸速度分別為6、12、18、24、30、36和42 mm/s,研究拉伸速度對傳感器傳感性能的影響,結果如圖10所示。可以看出,在不同的拉伸速度下,傳感器的相對電容值穩定在一個區間內,說明拉伸速度對傳感器的傳感性能不會造成大的影響。

圖10 拉伸速度對傳感器相對電容的影響
2.4 人體運動監測分析
圖11(a)示出測試者膝蓋不同彎曲角度時傳感器的電容變化情況。可以看出,從0°(I)逐步彎曲至90°(VI)的過程中,膝蓋每彎曲1次,電容值即刻發生變化,且電容值隨著彎曲動作停止而趨于穩定。圖11(b)示出測試者膝蓋從0°~90°連續彎曲運動時的電容變化情況。可以看出,在連續的彎曲運動過程中,傳感器的Cp/C0值呈現出非常規律的變化,其值在0.6~1.0之間穩定波動。圖11(c)示出測試者在跑步機上步行(3、4 km/h)、跑步(6 km/h)過程中膝蓋彎曲產生的實時電容信號變化情況。可以看出,步行和跑步運動都能產生較為穩定的信號變化。曲線中每個波谷代表膝蓋彎曲的最大時刻,此時傳感器拉伸到最大位置,每個波峰為傳感器回復到初始位置,即膝蓋伸直的時候。在3、4 km/h的速度下,測試者采取的是步行的姿勢,其步幅根據速度的大小進行調整,步幅較大。測試者經過速度適應后,步伐幾近一致,因此,在這2個速度下波形變化小,Cp/C0值在0.6~1.0之間穩定波動。而在6 km/h的速度下,測試者采取的是慢跑的姿勢行走,頻率較高、步幅較小,膝蓋彎曲幅度不大,因而傳感器的伸長率較低,電容值的變化范圍較小。

圖11 傳感器對膝部不同運動的監測
根據圖11(c)可以計算在3 km/h速度下,每走2步(因傳感器固定于一側的膝蓋,則一個波形變化為2步)所花費時間在1.21~1.58 s之間,平均花費1.39 s(步頻為86.4 步/min);4 km/h的速度下,每走2步所花費時間在1.02~1.26 s之間,平均花費1.12 s(步頻為107.2 步/min);在6 km/h的速度下,每走2步所花費時間在0.71~0.84 s之間,平均花費0.79 s(步頻為151.8 步/min)。說明傳感器除可根據電容變化值計算出膝部的彎曲幅度外,還可計算出行走的步數與步頻,實現對人體的運動監控。
3 結 論
本文采用水浴靜電紡絲法制備了以鍍銀聚酰胺6(SCN)為芯紗,聚酰胺6(PA6)納米纖維為皮層的納米纖維包芯紗,將其纏繞在橡筋上制備了應變-電容傳感器,根據實驗得到以下主要結論。
1)在4針頭水平排列、PA6紡絲液質量分數為12%,靜電電壓為20 kV,噴絲速率為0.2 mL/h,芯紗卷繞速度為0.16 m/min,接收距離為5 cm的靜電紡絲參數下,得到的納米纖維平均直徑為95.53 nm,且納米纖維完全包覆SCN;PA6納米纖維包覆前后,紗線的力學性能變化不大。
2)傳感器表現出較好的應變-電容傳感性能,其電容值隨拉伸距離的增大逐漸減小,在應變較小時具有良好的線性及敏感性,隨著應變的增大,線性度及敏感度逐漸減弱;經過長時間的循環拉伸動作,傳感器的電容值保持穩定,重復性和穩定性良好。拉伸速度的變化對其傳感性能基本無影響。
3)將傳感器應用于人體運動監測,均可得到穩定的膝蓋間歇、連續彎曲以及行走過程的電容信號變化,并可以根據電容變化幅度計算實際步數,實時監測人體運動,說明該傳感器在可穿戴人體運動健康監測領域具有潛在的應用價值。
4)在可穿戴柔性器件領域,柔性傳感器的研究大多集中于三維、二維結構以及壓力傳感,其面積和厚度都不利于實現柔性可穿戴器件的小型化、簡便化等特性。本文制備的一維電容式柔性傳感器實現了紗線拉伸傳感和雙螺旋結構的雙重創新,傳感性能各方面表現良好。
