基于TC264 的智能小車循跡系統設計
2023-12-18 05:53:32曹永豪劉付永紅張鈿鈿郭沈燕黃亮亮王汝瀚
電子設計工程 2023年24期
曹永豪,劉付永紅,張鈿鈿,郭沈燕,黃亮亮,王汝瀚
(1.華南理工大學自動化科學與工程學院,廣東廣州 510641;2.華南理工大學物理與光電學院,廣東廣州 510641;3.華南理工大學 材料科學與工程學院,廣東 廣州 510641)
近幾年無論是汽車企業還是互聯網大公司,都將自動駕駛作為重要的研究熱點。作為對將來生活有極大影響的新技術,其安全性、穩定性、舒適性受到了廣大的關注。
為了更方便、高效地進行研究,以智能小車為實驗載體,采用TiCore264[1-2]系列芯片作為中央處理器,同時使用總鉆風攝像頭采集路面信息、編碼器獲取后輪轉速、TFT 彩屏[3]顯示圖像,攝像頭將采集到的圖像傳輸給TC264 進行數據處理以識別不同道路類型,再經過控制算法輸出三路Pulse Width Modulation(PWM)信號[4]分別控制舵機、左電機、右電機,最終通過完成普通道路基本循跡、三岔路口判斷和小中大圓環判斷來實現自動駕駛。
1 系統總體方案
系統以TC264 芯片作為中央處理器,因其核心板擁有兩個核心,能夠穩定地接收攝像頭傳來的圖像,并對其進行處理得到預設的控制信號。
實現自動循跡的智能車將電池放在主板下面并接入電源模塊,電壓從電源模塊輸出經過主板為所有模塊提供工作電壓,然后攝像頭獲取道路圖像信息,并通過串口將采集到的信息傳輸給TC264 芯片進行分析處理,經過TC264 的算法處理后輸出PWM信號分別給舵機和驅動模塊,還會輸出信號給TFT屏幕將攝像頭采集到的圖像顯示出來。驅動模塊會將接受到的PWM 信號轉變成輸出控制電機的電壓。在調試階段開啟TFT 彩屏顯示攝像頭采集的圖像,以供道路標志點的算法設計,在循跡的時候關閉屏幕顯示,以免屏幕顯示占用太多CPU,導致智能車無法穩定地循跡。該智能車還采用了雙編碼器,將左右輪的速度采集回來給TC264 以實現負反饋速度閉環控制[5]。
1.1 系統電路設計
該智能車包括七大模塊:主板、TC264 核心板、電源板、驅動板、攝像頭、編碼器、TFT 彩屏,所有模塊的電氣連接示意圖如圖1 所示。另外,雖然此智能車沒有使用到陀螺儀,但是主板的設計還是保留了這一接口。

圖1 模塊連接示意圖
1.2 各模塊組成及其功能
各類模塊的功能如下:
①主板:提高智能車集成化程度,TC264 核心板、電源模塊和TFT 彩屏均插在主板上面。
②TC264 核心板:接收攝像頭和編碼器傳輸過來的信號,根據控制算法做出決策輸出三路PWM 信號控制舵機和電機。
③電源板:為各類外設提供符合要求的電壓,包括舵機6.5 V、核心板3.3 V、編碼器5 V、隔離電路5 V、攝像頭3.3 V 等。
④驅動板:根據主板傳輸過來的PWM 信號,通過IR2103S[6]芯片和H 橋電路實現電機電壓的控制。
⑤攝像頭:采用MT9V034[7]總鉆風攝像頭,130°無畸變獲取道路邊界黑線圖像信息,傳輸給TC264核心板。
⑥編碼器:獲取后輪左右電機的轉速傳輸給核心板,以實現負反饋速度閉環控制。
⑦TFT 彩屏:在控制算法設計階段通過查看TFT 彩屏的信息來設計可以識別不同道路元素的控制算法。
1.3 各模塊具體設計
電源模塊的產生是為了給核心板、攝像頭、SD卡、屏幕、陀螺儀、編碼器、隔離電路和舵機供電,三種降壓電路如圖2 所示,采用LM2941S[8-9]將7.2 V 降壓為6.5 V 為舵機供電;采用LM2940IMP-5.0[10]將7.2 V 降壓為5 V,為兩個編碼器和隔離電路提供電源,同時為AMS1117 提供輸入電壓;采用AMS1117-5.0 將5 V 電壓降為3.3 V,為核心板、攝像頭、SD 卡、TFT 彩屏和陀螺儀提供電源。

圖2 三種降壓電路圖
驅動模塊需要將主板傳輸來的PWM 信號轉換為H 橋控制信號對H 橋的MOS 管進行通斷控制,進而控制電機的轉速和轉向[11-12]。驅動板原理圖如圖3 所示,將PWM 信號轉換為H 橋控制信號的元件為IR2103,而IR2103 的工作電壓為12 V,所以還需要將電源電壓7.2 V 升壓為12 V。PWM 接口接受四路信號,可以實現電機的正反轉。

圖3 驅動板原理圖
主板上承載了攝像頭接口、屏幕接口、編碼器接口、SD 卡槽、電源接口、舵機接口、驅動接口、核心板接口、陀螺儀接口,在各元件之間采用網絡標簽的方式進行連接以減少連線混亂,其設計原理圖如圖4所示。

圖4 主板部分原理圖
主板基本都是接口和一個隔離電路,把所有的電線集成到了一塊電路板上,極大地提高了集成度。主板PCB 的設計圖如圖5 所示,(a)、(b)分別為PCB的正反面。
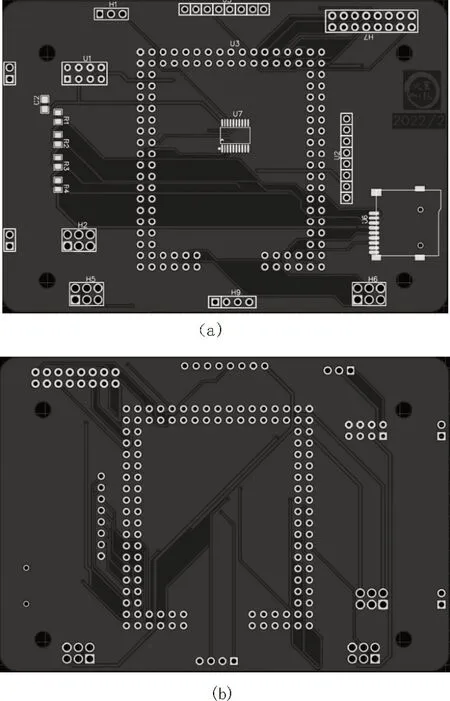
圖5 主板PCB的設計圖
2 系統軟件設計
2.1 軟件總體框架
文中設計的智能車循跡由攝像頭采集道路信息,經過控制算法處理輸出PWM 信號控制舵機和電機來實現的。采用總鉆風攝像頭識別到的圖像是灰度值不同的圖像,為了容易準確地識別到行進的路線,減少環境因素干擾,系統運用圖像二值化[13]將原圖像轉化為純黑白兩色圖像。經過二值化處理后的圖像,道路的邊線信息就容易被獲取,根據道路兩邊的黑線取平均值,并將該平均值與屏幕的中線進行比較計算偏差,然后再通過編碼器獲取當前車速[14],經過偏差和車速來輸出PWM 信號控制舵機的轉角以及對應的電機左右輪差速,使得智能車在行進拐彎的時候更加穩定。實現道路普通循跡外,測試中還需要識別三岔和圓環元素進行對應的控制,使得智能車能夠順利的通過三岔路口和圓環。控制流程圖如圖6 所示。
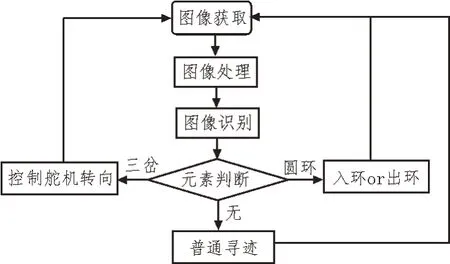
圖6 控制流程圖
2.2 圖像處理模塊功能
智能車循跡是識別道路邊線進行循跡的,真實世界中有著各種各樣的顏色,但只需要識別道路黑色的邊線即可,其他顏色可以忽略掉,因此需要將攝像頭采集到的圖像進行二值化處理,從而找到問題的主要矛盾的主要方面,提高識別的精確度。系統首先將圖像轉化為灰度直方圖,即將圖像以256 階的灰度存儲在數組當中,方便接下來對圖像的進一步處理。
2.3 循跡模塊功能
循跡的基本原理是通過計算道路兩邊的黑色邊線來算出中線,然后根據中線和屏幕中線的偏差來計算控制舵機的打角,并給后輪電機一定的速度偏差來實現基本循跡。
在控制舵機的時候,無法使用所有舵機的轉動范圍,當轉角大于180 度時,輪子的轉動范圍限制了舵機的轉動,此智能車搭建完畢后,前輪居中時控制舵機的PWM 信號占空比為10.95%,前輪左打滿時控制舵機的PWM 信號占空比為11.90%,前輪右打滿時控制舵機的PWM 信號占空比為10.03%,控制舵機的PWM 信號的幅值是3.3 V,頻率是50 Hz,周期是0.02 s。智能車在直道行駛時,控制后輪電機PWM 信號的基礎占空比是27%,幅值為3.3 V,頻率是10 000 Hz;當智能車在中線偏差絕對值大于10 的彎道行使時,給到的PWM 信號占空比為24%,幅值和頻率保持不變,然后在24%的基礎上給予左右輪PWM 信號分別加減相同的占空比,目的是使智能車在轉彎的時候減少打滑的情況發生,能夠穩定、快速地過彎。其中包括了利用PID 計算中線偏差以及計算舵機和電機的PWM 偏差。這里使用了模糊控制[15-16]+PID,測試初期只使用了模糊控制,但是控制效果并不是很好,智能車在循跡的過程中很容易發生搖擺,經過改進后采用模糊控制+PID,車的運動變穩定了,從而提升了道路元素的識別成功率。
3 系統測試
3.1 三岔判斷
將測試小車放在三岔路口,使用屏幕觀察三岔路口的特點,根據判斷條件:兩邊邊線有拐點,而且拐點到有效行上邊界的斜率左負右正,屏幕顯示如圖7 所示。實踐表明,測試系統的算法識別率是挺高的,不過會發生誤判,在一些彎道會被誤判成三岔,后來通過道路模式分類,解決了這個問題。
智能車在識別到三岔道路后,系統采用的方案是給予一定時間的固定舵機打角,當智能車進入預定道路之后再回歸到正常循跡的過程。
3.2 圓環判斷
圓環的算法設計過程和三岔大體上保持一致,根據場景中的特定位置,判斷其圓環特征,屏幕顯示如圖8 所示。測試初期出現智能車會因為圓環的第一個缺口而發生循跡抖動,為此設計了一個算法實現智能車在識別到這個缺口時保持直走一段時間,判斷到第二個缺口后就采用固定打角駛入圓環。缺口的判斷條件是識別到左邊丟線(即無法搜索到道路邊界線)加右邊是直線,是則采用直走的方案,直走結束后再來觀察是否達到入環判斷條件,即左邊有拐點且右邊是直線,如果滿足條件就固定打角入環,否則,就繼續正常循跡。這種策略可以避免圓環誤判造成沖出道路的現象發生。

圖8 屏幕顯示圓環路口圖
4 結論
基于TC264 的智能車要實現自動駕駛,首先要能夠獲取到與速度相匹配的幀率的圖像,并將獲取到的圖像進行處理,為了提高運算速度和精度,通常需要降低圖像分辨率,并對圖像做二值化處理,以便對道路的識別和判斷,從而作出不同的控制策略。面對不同的路面元素需要設計合適的判斷條件對其進行判斷,并綜合利用PID 控制和模糊控制來對舵機進行轉向控制,利用編碼器和PID 對車速進行閉環控制,以確保智能車能夠穩定地識別路面元素并對其作出相應的決策。
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
表面工程與再制造(2019年6期)2019-08-24 06:40:04
中國生殖健康(2019年3期)2019-02-01 06:12:26
文苑(2018年23期)2018-12-14 01:06:06
文苑(2018年19期)2018-11-09 01:30:14
文苑(2018年17期)2018-11-09 01:29:26
文苑(2018年21期)2018-11-09 01:22:32
商周刊(2018年18期)2018-09-21 09:14:46
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25