高速公路養護維修作業區行車速度控制
2023-12-18 09:48:08王定德
城市建設理論研究(電子版) 2023年34期
王定德
甘肅省酒泉公路事業發展中心 甘肅 酒泉 735000
近些年高速公路養護維修管理觀念創新,但是管理方法滯后,高速公路養護維修期間的事故風險排除不理想。基于此,加大對高速公路養護維修作業區行車速度控制研究力度,尋找更科學有效的行車速度控制方法,為高速公路養護維修作業工作開展提供參考。
1 高速公路養護維修作業區行車速度控制必要性
1.1 降低高速公路維修作業區域事故率
高速公路養護維修作業區行車速度控制,是降低事故率的關鍵所在。通過對近些年高速公路維修作業區域事故情況調查發現,速度控制不當引起的概率為45%,施工操作不當引起的事故率為19%,其他因素引起概率為36%,詳見圖1。
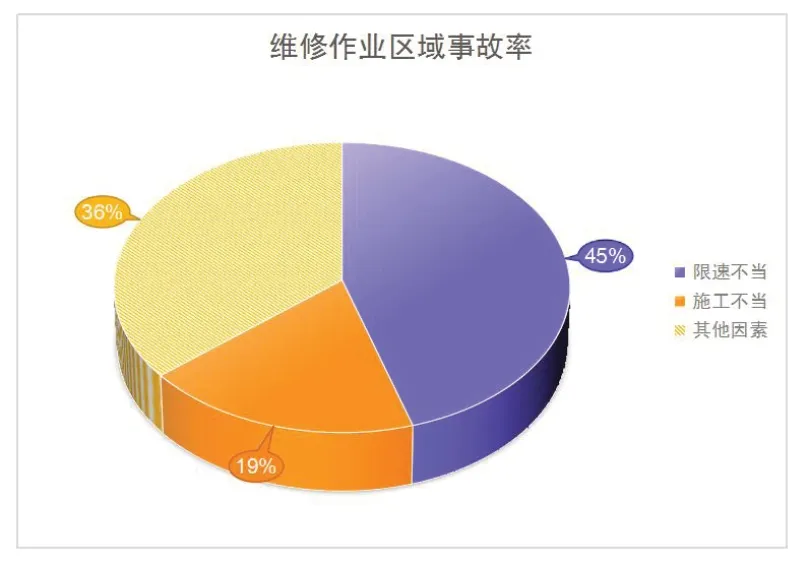
圖1 高速公路維修作業區域事故發生率示意圖
以下對某高速路段近半年維修作業區域安全事故發生情況進行整理,其中多起為車速控制不到位造成。2023年1月15日,該高速路段部分區域出現裂縫,維修團隊著手對該區域展開維修。距離維修區域1km位置,出現單車沖破隔離護欄撞擊養護人員事故,導致正在作業的多名養護人員受傷,3人死亡。2023年3月2日,保潔人員正常對高速公路進行保潔作業,一輛急速行駛的轎車與保潔施工車相撞,事故造成1人死亡2人重傷。2023年3月28日,高速公路1523km+5m位置正在施工作業,一輛重型半掛車與施工現場專項作業車碰撞,因為半掛車慣性移動,相繼造成三車相撞,事故3人重傷、2人死亡。2023年5月15日,高速公路33km+200m位置,輕型普通貨車與道路養護工作人員相撞,事故1人重傷,3人輕傷。同月31日一輛小型轎車行駛途中沖入緩沖區,并與道路維修施工車輛碰撞,導致3名施工人員受傷。高速公路管理中,車輛速度控制始終是事故控制的主要原因,加上養護維修作業區域對行車條件造成影響,道路變窄、交通限流等,若不能科學控制行車速度,必然會增加事故發生風險,因此養護維修作業區域行車速度控制是降低高速公路維修作業區域事故的必然選擇。
1.2 科學緩解高速公路交通堵塞壓力
高速公路養護維修作業區域行車速度控制,對高速公路交通堵塞壓力緩解有重要作用。高速公路養護維修作業,必然會影響到高速公路正常通行,導致高速公路通行車道減少[1]。表1是對某高速公路現場維修作業通行能力變化統計,結合表1發現,高速公路養護維修作業區域,通行率明顯下降,并且會隨著封閉車道數量的變化而變化。由此可以看出,高速公路維修養護作業區域屬于道路通行在“瓶頸”區域。
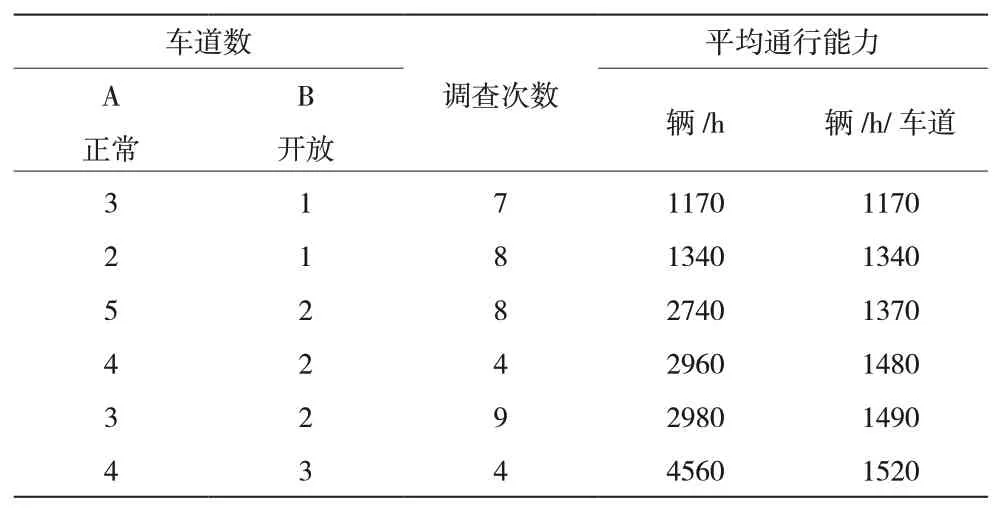
表1 某高速公路現場維修作業通行能力變化統計
與此同時,通過對交通流理論研究以及高速公路養護維修作業區域速度、流量變化觀察,道路的通行能力主要由速度與車流量決定,若行車速度提高,必然會波及車流量變化。對于高速公路的“瓶頸”區域,如養護維修作業區域,若不能科學控制行車速度,會導致車流行駛緩慢與過度堵塞,車流排凈不及時,車流排隊時長增加,甚至會牽連到作業區域的上流道路[2]。科學地控制行車速度,保證車流及時排凈,縮短交通堵塞時長,才能夠有效挽回交通損失。
2 高速公路養護維修作業區行車速度影響因素
高速公路養護維修作業區行車速度的科學控制,必須明確其影響因素,這樣才能制定更完善、科學的控制方案,提高高速公路養護維修作業區的作業與行車安全。養護維修作業區的行車速度控制,必須著重注意兩方面,其一是道路條件;其二是交通條件。以下分別對這兩個條件因素進行詳細分析:
2.1 道路條件
道路條件與車輛速度的控制關系,第一需依據車道寬度進行設計,第二需實時了解路面狀況。高速公路養護維修作業區,必然會設置路障等保護設施,道路寬度因此變窄,行車速度也需做出調整[3]。為保證養護維修作業的順利完成與行車安全,必須在作業區域的進出口位置、道路交叉口位置對行車道路寬度適當縮小,并設置警示牌,以此去提醒駕駛人及時減速、安全通行。作業區域及上下方路段路面狀況提前勘察,尤其是平整度、穩定性等,這些都會速度控制息息相關。適當對路面平整度進行調整,如增設路障,將路面振動、顛簸等增加,以此讓駕駛人員被迫降速。
2.2 交通條件
高速公路養護維修作業區行車速度控制還受到交通條件的影響。結合高速公路實際情況與交通條件,制定適配的行車速度控制策略,這樣才能有效提高交通管理質量,并保證高速公路養護維修作業區的施工與行車安全[4]。
3 高速公路養護維修作業區行車速度控制優化策略
高速公路養護維修作業是延長公路使用壽命,保證高速公路行車安全,排除質量問題的基礎,結合高速公路養護維修作業區行車控制實際情況,對作業區通行能力與修正系數等明確,為優化策略制定提供依據。
3.1 養護維修作業區通行能力計算
高速公路養護維修作業區行車速度的科學控制,必須以通行能力為基礎展開,目前高速公路作業區通行能力的計算,包括多個影響因素,如封閉車道數、坡度以及交通量等[5]。具體計算公式如下:
計算公式中對基本通行能力,即CC、車道寬度影響修正系數,即fW、大型車影響修正系數,即fHV、坡度影響修正系數,即fP等進行整理計算,隨即得到作業區通行能力,即CWZ。
3.2 養護維修作業區通行能力修正系數
針對作業區封閉車道數量,對基本的通行能力進行計算。構建以通行能力為中心的VISSIM模型,并應用數據檢測器對作業區通行能力各項指標進行檢測[6]。對不同車道封閉下交通量的變化實時考察基礎上,還需要對擁擠條件下交通量的變化與通行能力等進行分析。此次研究中,針對某高速公路養護維修作業區組織試驗,選定單向2車道路段,將1車道封閉,車流量不同變化條件下交通量變化詳見表2(注:試驗數據以每小時交通量為主)。結合表2發現,該路段每小時車流量≥2000輛情況下,養護維修作業區出現明顯擁擠。車流量為±1862輛期間作業區已達到小時流量最大值,因此針對該路段交通與道路條件,基本通行能力平均值為1862輛/h。
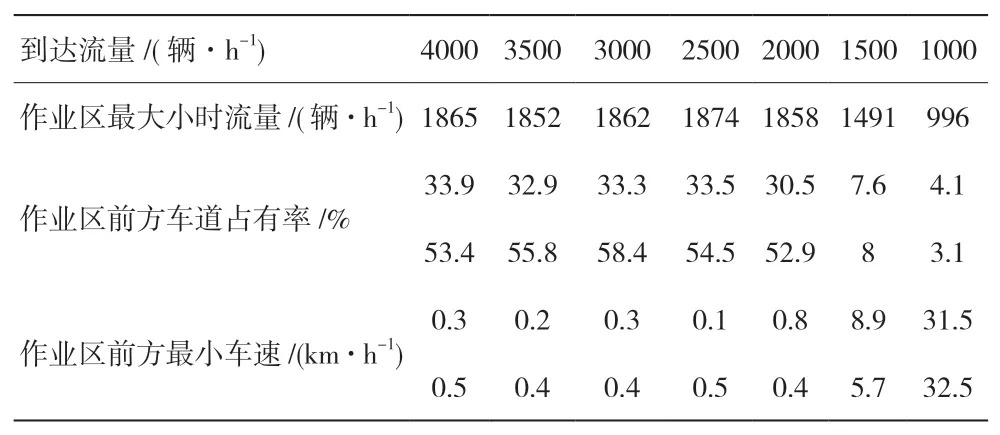
表2 車流量不同變化條件下交通量變化
隨后對該高速公路單向3、4車道路段區域組織試驗,實驗結果見表3。結合表3可以發現,3、4車道并且大車與坡度分別為0%的交通條件下,最大小時交通量平均值為1812輛。
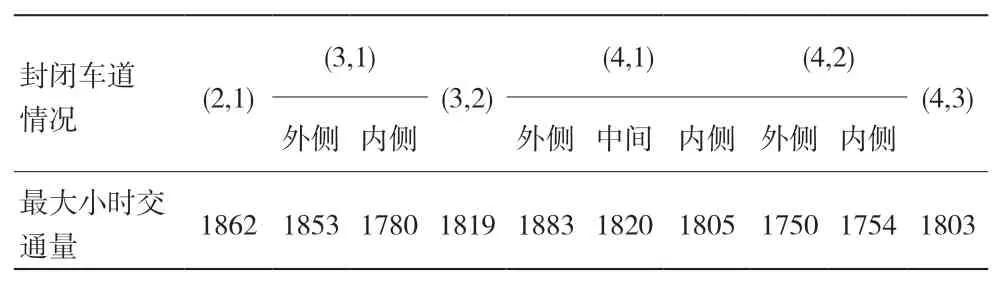
表3 封閉不同車道條件下最大小時交通量變化(輛/h)
養護維修作業區大車率條件差異背景下,交通量同樣會出現波動,具體數據詳見表4。結合表4可以發現,若高速公路作業區的交通流量≤通行能力期間,大車率并不會影響到作業區交通通行,若作業區交通流量>通行能力期間,大車率對道路通行能力有明顯影響,即大車率越高,道路的通行能力下降明顯。在此基礎上,客觀分析養護維修作業區不同流量條件下交通量的變化,得到道路擁擠條件下最大小時交通量,隨后對作業區在大車率變化條件下通行能力折減情況,詳見表5。
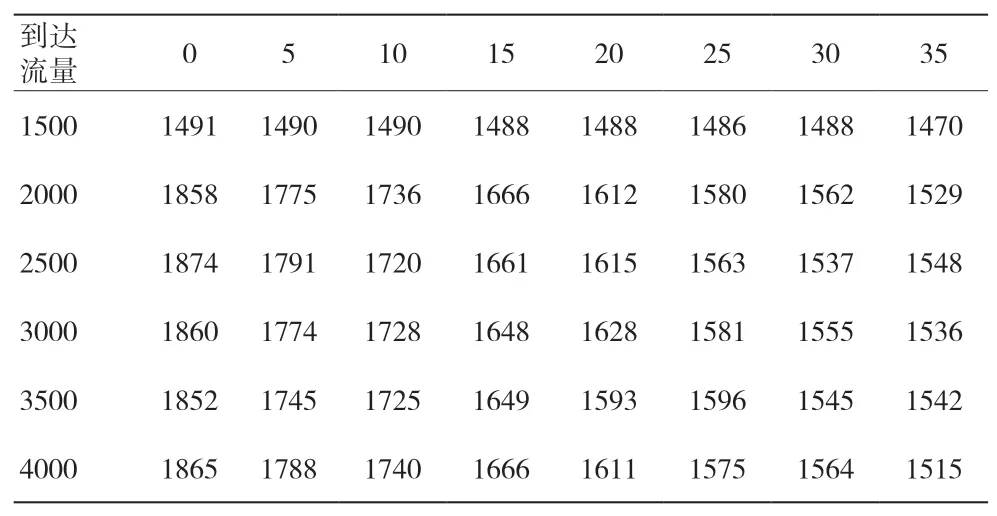
表4 作業區不同大車率條件下最大小時交通量(%)
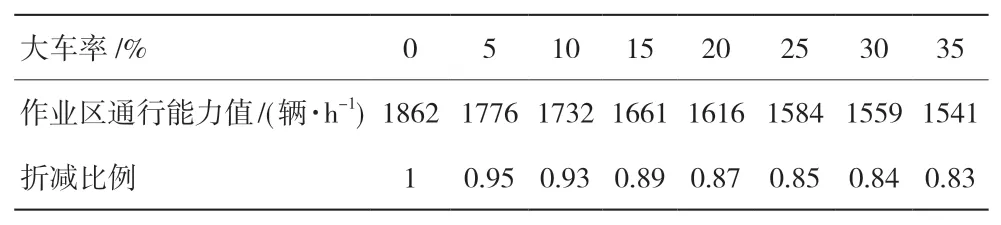
表5 作業區大車率變化條件下通行能力折減
3.3 養護維修作業區通行能力限速處理
3.3.1 計算行車速度控制期望值
結合高速公路養護維修作業區行車速度控制需求與通行能力計算等,以交通量最大值為依據,設定行車臨界速度,確保行車安全與交通通順。具體模型如下:
基于模型特點,科學梳理速度、流量關系,即:
速度密度模型計算中,解條件如下:
計算公式中,主要包括交通流量,即Q;空間平均車速,即V;暢行速度,即Vf;阻塞密度,即Kj;平均車流密度,即K。
根據計算獲得高速公路養護維修作業區行車速度控制的期望值,根據期望值去靈活調整交通量,科學規避車流紊亂問題,并緩解車輛擁擠情況,提高行車安全。
3.3.2 設置養護維修作業區交通標志牌
計算行車速度控制期望值,為養護維修作業區行車速度控制提供依據的同時,還需要及時設置交通標志牌,引導駕駛人員合理調整行駛速度。當然因為高速公路行駛速度快,交通標志必須重復設置,否則無法吸引駕駛人員的注意。對此,高速公路養護維修作業區會重復設置交通標志牌,每個交通標志牌的間隔為250m,以此去激發交通標志牌指令作用[7]。不僅如此,還可以采取組合標志設置的方式,強化標志警醒作用,順利傳達標志信息。部分復雜路段還可以增設機械旗手,搭配組合式交通標志牌,去提高行車速度控制效果。
3.3.3 養護維修作業區安裝雷達報警器
雷達報警器的安裝,是高速公路養護維修作業區行車速度控制的重要方式,是科學技術有效滲透的體現。雷達報警器有效整合微波頻率段,并以電子雷達系統為載體實時傳遞交通信息。若超出規定行駛速度,雷達報警器會迅速發出預警,提醒駕駛人員適當降低速度。雷達報警器包含探測裝置,安裝操作靈活,并且適應性強,可根據高速公路具體情況科學調整。不僅如此,雷達報警器還能夠輔助交警對交通安全進行監測。
3.3.4 安裝速度追蹤顯示屏與視覺限速標線
速度追蹤顯示屏已成為高速公路養護維修作業區行車速度控制的重要工具,目前速度追蹤顯示屏已完成多次升級,并融入大數據技術。雷達測速系統覆蓋范圍更廣,反應更靈敏,實時上傳追蹤信息,根據超速情況自動調節車速等。視覺限速標線的應用,主要從視覺效應角度出發,幫助司機認識到行駛速度的變化,并自覺降低行車速度。
4 結束語
綜上所述,為制定更完善的行車速度控制策略,必須對道路條件、交通條件在作業區行車速度控制中的影響深層次梳理,并構建速度密度模型,計算行車速度控制的期望值等,在此基礎上,取得更理想的行車速度控制效果。
猜你喜歡
少年博覽·初中版(2020年6期)2020-06-12 11:42:23
故事大王(2016年7期)2016-09-22 17:30:08
中國交通信息化(2016年9期)2016-06-06 07:42:10
中國科技博覽(2016年2期)2016-04-25 20:32:39
小學生導刊(2016年34期)2016-04-11 00:49:44
電測與儀表(2015年5期)2015-04-09 11:30:52
小說月刊(2014年4期)2014-04-23 08:52:20
河南科技(2014年18期)2014-02-27 14:15:06
兒童故事畫報(2013年3期)2013-06-24 05:40:30
民生周刊(2012年10期)2012-10-14 09:06:46