物流無人機城市低空軸輻式網(wǎng)絡構(gòu)建方法研究
2023-12-17 01:59:32曲欣宇葉博嘉程予雷昌定
山東科學 2023年6期
關(guān)鍵詞:無人機
曲欣宇 葉博嘉 程予 雷昌定
摘要:無人機在城市物流配送方面具有極大應用潛力,然而城市低空空域運行場景中的潛在不確定因素較多,亟待通過科學方法構(gòu)建安全有序的物流無人機配送網(wǎng)絡。從物流無人機運輸經(jīng)濟性和運行安全性角度出發(fā),結(jié)合物流無人機性能特征,在原有地面物流配送網(wǎng)點的基礎上,構(gòu)建多層級軸輻式網(wǎng)絡的整數(shù)規(guī)劃模型,提出了帶距離限制的PAM(partitioning around medoids,圍繞中心點劃分)聚類與整數(shù)規(guī)劃相結(jié)合的網(wǎng)絡構(gòu)建方法;從配送時效性、網(wǎng)絡安全性和網(wǎng)絡結(jié)構(gòu)特征三方面選取評價指標,用于對比構(gòu)建物流無人機運輸網(wǎng)絡與原地面運輸網(wǎng)絡;以南京市江寧區(qū)為例構(gòu)建物流無人機配送網(wǎng)絡,驗證該網(wǎng)絡構(gòu)建方法的可行性。實驗結(jié)果表明,該方法構(gòu)建的無人機配送網(wǎng)絡在兼顧運輸成本與運輸安全性的同時,還具有較好的配送時效性。
關(guān)鍵詞:無人機;城市低空空域管理;物流配送;軸輻式運輸網(wǎng)絡;PAM聚類
中圖分類號:U8?? 文獻標志碼:A?? 文章編號:1002-4026(2023)06-0086-10
The method to construct an urban logistics unmanned aerial vehicles
low-altitude hub-and-spoke network
QU Xinyu, YE Bojia*, CHENG Yu, LEI Changding
(College of Civil Aviation,Nanjing University of Aeronautics and Astronautics,Nanjing 211106,China)
Abstract∶Unmanned aerial vehicles (UAVs) have considerable application potential in urban logistics delivery. However, there are many uncertainties in urban low-altitude airspace operation scenarios. Therefore, it is essential to build a safe and orderly logistics UAV delivery network using scientific methods. From the perspectives of delivery economy, operational safety, and features of logistics UAVs, an integer programming model of multilevel hub-and-spoke network was constructed based on the original ground logistics delivery network. A network construction method was proposed, which combines partitioning around medoids(PAM) clustering with distance restrictions and integer programming. Three evaluation indicators were selected, i.e., delivery timeliness, network security, and network structure characteristics, to compare the constructed logistics UAV delivery network with the original ground delivery network. A logistics UAV delivery network was constructed in Jiangning District of Nanjing city to verify the feasibility of the proposed network construction method. The experimental results show that the UAV delivery network constructed using this method has good delivery timeliness while taking delivery costs and safety into account.
Key words∶unmanned aerial vehicle; low altitude airspace anagement; logistics and distribution; hub-and-spoke network; partitioning around medoids clustering
隨著快遞業(yè)務的迅猛發(fā)展,人們對快遞配送速度提出了更高的要求。無人機快遞配送不僅具有時效性強、成本低、可達性強的優(yōu)點,還可有效減少快遞配送過程中人與包裹的接觸。美國亞馬遜、德國敦豪、順豐速運、京東等眾多國內(nèi)外企業(yè)均在進行物流無人機的研發(fā)和試運行。此外,美國聯(lián)邦航空局、歐洲單一天空研究計劃等已開展無人機城市交通項目研究[1],中國民用航空局也先后發(fā)布文件針對城市物流無人機制定技術(shù)規(guī)范與航線標準,推動我國城市物流無人機宏觀政策走向成熟。城市低空空域成為無人機應用的重要場景,無人機的安全高效運行受到各界廣泛關(guān)注。
為保障城市低空空域內(nèi)無人機有序運行,各國學者對物流無人機航路網(wǎng)絡劃設展開研究。Venkatesh等[2]在需求和旅行時間限制下,分別對有容量和無容量限制的情況采用混合整數(shù)規(guī)劃方法進行機場選址;錢欣悅等[3]從配送效率出發(fā),以最小化物流配送成本和最大化客戶時間滿意度為目標,建立物流無人機起降點選址分配模型;任新惠等[4]以步行距離最短為目標函數(shù),以無人機機場的覆蓋半徑為約束構(gòu)建基礎線性規(guī)劃模型;Chauhan等[5]考慮初始電池可用性和電池消耗的不確定性提出整數(shù)線性規(guī)劃公式,并使用魯棒優(yōu)化最大化覆蓋率;Feng等[6]從建設成本和運營成本的角度出發(fā),考慮性能限制、空域限制和容量限制,建立了城市環(huán)境下物流無人機機場的選址模型;Li等[7]結(jié)合城市低空環(huán)境特點和物流無人機的操作局限性,提出了一種基于改進元胞自動機算法和最優(yōu)生成樹的航路網(wǎng)絡規(guī)劃方法;張洪海等[8]以總經(jīng)濟成本最小和客戶滿意度最高為目標,以禁飛區(qū)、無人機性能、容需匹配等為約束構(gòu)建整數(shù)規(guī)劃選址模型。目前這些研究多側(cè)重于無人機起降點的選址布局,大部分選址問題研究中考慮的常規(guī)因素有物流無人機的運輸需求、配送時間、配送距離、運輸成本等,少部分研究將無人機覆蓋半徑、禁飛區(qū)考慮在內(nèi)。但研究通常忽視航路網(wǎng)絡的安全性,僅有少數(shù)學者在無人機路徑規(guī)劃時考慮了無人機與地面人員碰撞的風險[9-11]。此外,在物流無人機運輸研究中缺少對配送節(jié)點等級劃分和運輸網(wǎng)絡結(jié)構(gòu)的研究。
本研究聚焦城市低空空域末端運輸,在地面快遞網(wǎng)點的基礎上構(gòu)建無人機快遞運輸網(wǎng)絡。依據(jù)網(wǎng)點等級劃分將網(wǎng)絡構(gòu)建問題分解為底層網(wǎng)點聚類和構(gòu)建上層嚴格軸輻式網(wǎng)絡模型;最后,以南京江寧某快遞公司網(wǎng)點為例構(gòu)建無人機快遞運輸網(wǎng)絡,對比分析網(wǎng)絡評價指標。研究為未來城市低空物流無人機配送網(wǎng)絡的構(gòu)建提供方法參考,推動城市物流無人機未來商用化的發(fā)展。
1 問題分析
目前無人機快遞配送主要應用在區(qū)域樞紐機場到二、三線城市機場間的支線運輸和二、三線城市機場到顧客的末端運輸,物流企業(yè)可通過配置無人機起降平臺、快遞接駁柜等基礎設施改造原地面快遞網(wǎng)點。城市低空空域內(nèi)建筑物、電磁信號等的干擾均會對物流無人機的運行帶來阻礙,物流無人機的投入使用必將增加城市低空運行的復雜度。為保障未來城市低空空域內(nèi)物流無人機的安全運行,避免物流無人機無序運行導致低空空域環(huán)境復雜、危害居民生命財產(chǎn)安全,需對物流無人機配送網(wǎng)絡進行合理有序的規(guī)劃。
1.1 網(wǎng)絡結(jié)構(gòu)選取
傳統(tǒng)地面快遞網(wǎng)絡依靠一定的網(wǎng)絡結(jié)構(gòu)完成運輸活動,網(wǎng)絡中通常劃分快遞節(jié)點等級,包裹經(jīng)各級節(jié)點層層分揀運輸最終送達目的地。民航運輸網(wǎng)絡與地面運輸網(wǎng)絡常見的結(jié)構(gòu)有全連通網(wǎng)絡、軸輻式網(wǎng)絡[12]。其中,全連通網(wǎng)絡將網(wǎng)絡中每兩點都相連接,該網(wǎng)絡中快遞運輸不存在中轉(zhuǎn),運輸效率高但穩(wěn)定性差,適用于貨運量大且運輸網(wǎng)點少的情況。物流無人機運輸量達不到全聯(lián)通網(wǎng)絡的規(guī)模經(jīng)濟需求,因此全聯(lián)通網(wǎng)絡結(jié)構(gòu)并不適合無人機運輸時使用。而在軸輻式網(wǎng)絡中,快件至少經(jīng)一次中轉(zhuǎn)到達目的地,其按非樞紐點間能否直接連接可進一步分類為嚴格和非嚴格軸輻式網(wǎng)絡。嚴格軸輻式網(wǎng)絡在快遞運輸中應用廣泛,與現(xiàn)有快遞運輸模式適應、便于追蹤快遞信息。為適應具有分揀、轉(zhuǎn)運等不同功能網(wǎng)點的運輸,本文選擇構(gòu)建多層級嚴格軸輻式物流無人機運輸網(wǎng)絡。
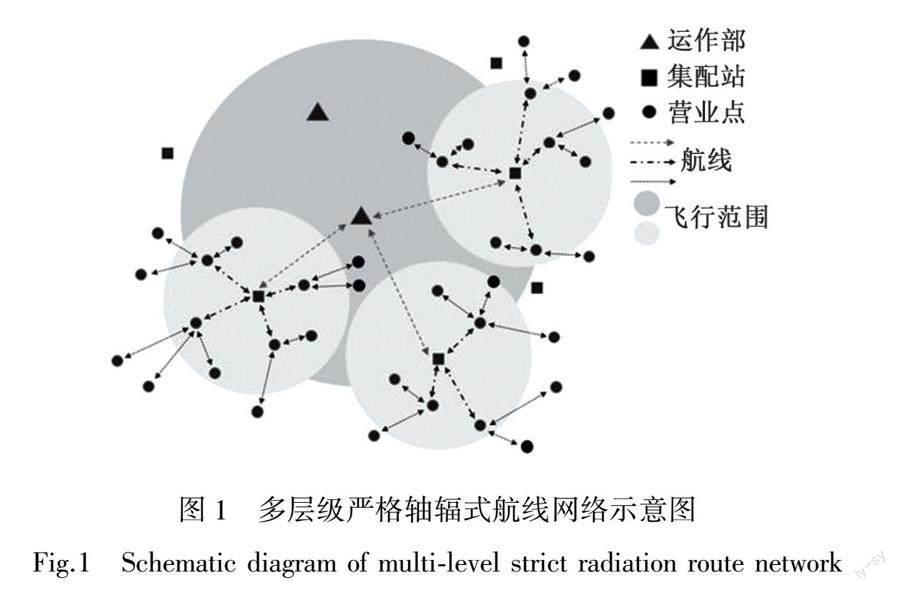
多層級嚴格軸輻式網(wǎng)絡中至少包含3類網(wǎng)絡節(jié)點,如運作部、集配站、營業(yè)點。各層級網(wǎng)點與從上一級篩選出的樞紐點構(gòu)成嚴格軸輻式網(wǎng)絡,而篩選出的樞紐點又可進一步構(gòu)建出更高一級的軸輻式網(wǎng)絡,最終得到由多層級嚴格軸輻式航線網(wǎng)絡組成的城市物流無人機網(wǎng)絡,如圖1所示。
1.2 無人機運行安全因素
研究主要從城市低空空域使用、無人機城市運行風險和物流無人機性能三方面考慮城市低空物流無人機的運行安全。
低空空域指真高1 000 m(含)以下區(qū)域,根據(jù)2022年中國民用航空局發(fā)布的《城市場景輕小型無人駕駛航空器物流航線劃設規(guī)范》[13],物流無人機航線應在高于高度零位面以上40 m并低于高度基準面以上120 m的空域范圍內(nèi)劃設,航線高度可根據(jù)航空器性能和地形變化,物流無人機應在專為無人機劃設的隔離空域內(nèi)運行。雖然目前尚未有明確的物流無人機隔離空域劃設規(guī)定,但為避免影響民航運輸?shù)倪\行安全,民航局規(guī)定無人機城市運行需在機場、臨時起降點圍界以及周邊2 000 m外。因此,城市物流無人機網(wǎng)絡構(gòu)建時需首先確保在規(guī)定高度層內(nèi)且不飛經(jīng)城市中機場禁飛區(qū)和限高區(qū)。
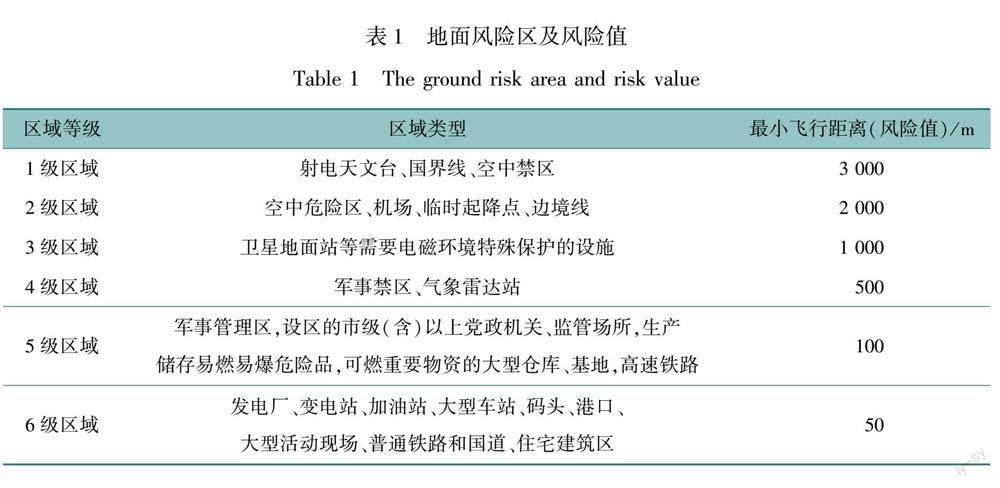
城市運行風險方面,無人機運行風險可大致分為空中飛行碰撞與地面碰撞,由于城市物流無人機需在隔離空域運行,本研究忽略無人機在空中與民航飛行器的空中碰撞風險。中國民航局發(fā)布的《無人駕駛航空器飛行管理暫行條例》[14]綜合考慮了無人機地面碰撞時可能引發(fā)的地面次生傷害、地面人員安全、地面設施安全以及可能引發(fā)碰撞的電磁環(huán)境等安全問題,規(guī)定了輕小型無人機在飛經(jīng)衛(wèi)星地面站、危險品存儲區(qū)、活動現(xiàn)場等各類城市區(qū)域時應保持的飛行間隔。為綜合考慮地面碰撞的所有可能風險,本文劃設六類城市物流無人機運行風險區(qū)域。由于最小飛行距離與風險值為正相關(guān)關(guān)系,可體現(xiàn)無人機在飛經(jīng)各類區(qū)域可能產(chǎn)生風險的程度,將輕小型無人機與不同風險區(qū)應保持的最小飛行距離作為該類區(qū)域的風險值,詳細內(nèi)容見表1。
在物流無人機性能方面,市面上現(xiàn)有的物流無人機實際運行時其飛行距離、載重、飛行轉(zhuǎn)彎角等方面均有上限。因此,在構(gòu)建網(wǎng)絡時通常需考慮最大飛行距離、最大載重、最大轉(zhuǎn)彎角等限制,超出限制外的飛行行為將影響無人機運行安全。本研究將無人機最大飛行距離、最大載荷重量作為網(wǎng)絡構(gòu)建的主要約束條件,而路徑規(guī)劃并非本文研究內(nèi)容,因此對無人機最大轉(zhuǎn)彎角等涉及路徑規(guī)劃的性能約束做簡化處理。
2 網(wǎng)絡構(gòu)建方法
2.1 建立整數(shù)規(guī)劃模型
以總配送成本和途徑區(qū)域風險值最低為目標函數(shù)構(gòu)建嚴格軸輻式網(wǎng)絡模型,通過求解該模型可從上級網(wǎng)點中選出樞紐點以及各網(wǎng)點與上級樞紐點間的分配方式,自下而上在各層級網(wǎng)點構(gòu)建軸輻式網(wǎng)絡,最終得到由多層級嚴格軸輻式航線網(wǎng)絡組成的城市物流無人機網(wǎng)絡。
2.1.1 假設與符號說明
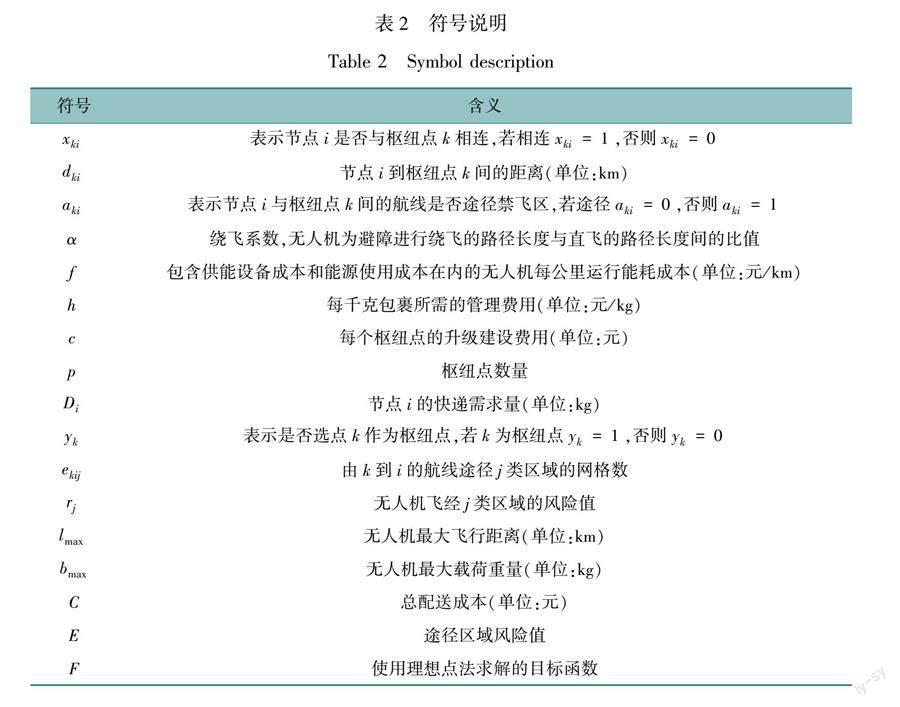
模型中符號的含義及其單位見表2。本文假設說明如下:
(1)樞紐點容量總能滿足需求點需求;
(2)由樞紐點出發(fā)的無人機每次運輸多個包裹,每次包裹總重量達到無人機最大載荷;
(3)不考慮無人機載重對運輸能耗的影響;
(4)無人機運行中對航線高度上的建筑物等障礙物自主避障,繞飛程度以繞飛系數(shù)體現(xiàn)。
2.1.2 模型構(gòu)建
min C=∑nk=1∑mi=1fαDidkiakixkibmax+∑mi=1Dih+pc,(1)
min E=∑oj=1∑nk=1∑mi=1rjekijakixki,(2)
s.t. ∑nk=1αkixki=1,(3)
∑nk=1yk=p,(4)
xki≤yk,(5)
akidkixki≤lmax,(6)
其中,公式(1)(2)為目標函數(shù),即總配送成本最小和途徑區(qū)域風險值最低,配送成本包含貨物運輸能源成本、運營成本和樞紐點建設成本,其中,運營成本包括在樞紐和需求點以及運輸途中的管理費用。為減少無人機在城市空域運行的風險,無人機航線應盡量少地途徑黨政機關(guān)、電力設施、建筑物、公路等區(qū)域,即無人機應選擇風險值較低的航線。公式(3)確保每個節(jié)點都與樞紐點相連接。公式(4)限制樞紐點數(shù)量。公式(5)保證與各節(jié)點相連接的為被選中的樞紐點。公式(6)保證無人機實際飛行距離在最大飛行距離內(nèi)。
選擇理想點法求解該多目標規(guī)劃模型。分別以式(1)和式(2)為目標求解兩個單目標模型,分別得到目標函數(shù)值C*、E*。再以式(7)為目標,將多目標規(guī)劃轉(zhuǎn)化為單目標規(guī)劃,求得距離兩理想點最近的解。
min F=(C*-CC*)2+(E*-EE*)2。(7)
2.2 底層網(wǎng)點聚類
在運輸網(wǎng)絡中各層級備選網(wǎng)點的數(shù)量逐級遞增,底層網(wǎng)點多且分布范圍廣,不宜將所有底層網(wǎng)點納入同一嚴格軸輻式網(wǎng)絡。考慮到無人機最大飛行距離限制,采用基于距離劃分的PAM(partitioning around medoids,圍繞中心點劃分)聚類算法,并將最大飛行距離作為約束加入,將底層網(wǎng)點分為多個簇。帶距離約束的PAM算法克服了k均值聚類算法(k-means)的缺陷,通過計算每簇中除聚類中心外的各點到其他所有點的距離的最小值修正聚類中心,同時還能夠篩除無人機最大飛行范圍外的樣本點,從樣本點中選取聚類中心。帶距離約束的PAM聚類算法步驟如下:
步驟1 從n個樣本點中隨機選取k個初始聚類中心;
步驟2 計算剩余點到聚類中心的距離,將樣本點歸入無人機最大飛行距離內(nèi)且距離最近的聚類中心,若存在樣本點的無人機最大飛行距離內(nèi)無初始聚類中心,則重復步驟1至每個非聚類中心的樣本點均與最大飛行距離內(nèi)的聚類中心相匹配;
步驟3 計算所有樣本點與其聚類中心點的距離值,距離值累加得到損失值c0;
步驟4 選擇一個非中心樣本點替換聚類中心,重新計算損失值,若新的損失值小于c0,則將c0更新為新?lián)p失值,并將該非中心樣本點作為新的聚類中心;
步驟5 檢驗新聚類結(jié)果各簇中樣本點至聚類中心的距離,若存在簇內(nèi)距離超過無人機最大飛行距離的樣本點,則拋棄該聚類結(jié)果;
步驟6 重復步驟4、步驟5,直至聚類中心不再改變。
除了確定聚類中心的位置外,還需要確定聚類中心的數(shù)量,文中聚類簇數(shù)將通過輪廓系數(shù)確定。需要注意的是,將樣本點分為較少的簇時,由于在PAM聚類算法中加入了距離約束,聚類結(jié)果可能因距離約束被否定,在遍歷不同的聚類簇數(shù)時可能會出現(xiàn)部分簇數(shù)情況的缺失。此外,為確保生成的各簇內(nèi)樣本點間能夠構(gòu)建嚴格軸輻式網(wǎng)絡,還需排除聚類結(jié)果中單個樣本點成為一簇的情況。因此,聚類簇數(shù)的選擇將在排除以上兩種情況后,選取具有輪廓系數(shù)最大值的簇數(shù)作為最終的聚類簇數(shù)。
3 算例分析
3.1 現(xiàn)狀分析
在南京江寧區(qū)內(nèi)以快遞網(wǎng)點類型較全面且數(shù)量較多的快遞公司為例,共搜索到快遞中轉(zhuǎn)場、集散中心、集配站和營業(yè)點4類共55處網(wǎng)點。假定原有地面配送網(wǎng)絡中各網(wǎng)點均由距離最近的上一級網(wǎng)點配送,以直線連接的方式表示該快遞目前各級網(wǎng)點的分布情況,如圖2所示。
經(jīng)觀察分析,該快遞現(xiàn)有地面快遞配送網(wǎng)絡存在超過物流無人機最大飛行距離的路徑。從大疆GEO(geospatial environment online,地理空間環(huán)境)系統(tǒng)中獲取南京祿口國際機場禁飛區(qū)與限高區(qū),部分網(wǎng)點處在南京祿口機場禁飛區(qū)和限高區(qū)內(nèi)。因此,不能直接以現(xiàn)有地面配送網(wǎng)絡作為無人機配送網(wǎng)絡,需要篩選網(wǎng)點并構(gòu)建適合物流無人機運行的快遞配送網(wǎng)絡。
3.2 參數(shù)設置
擬使用市面上主流物流企業(yè)研發(fā)的物流無人機Ark方舟進行集配站到營業(yè)點樞紐的中短距離運輸,該機型最大載荷重量為12 kg,最大航程為20 km;營業(yè)點樞紐到營業(yè)點的短距離運輸由H4四旋翼無人機負責,該飛行器最大載荷重量為10 kg,最大航程為15 km。假設各營業(yè)點每日無人機快遞運輸需求為20 kg,其他參數(shù)假設見表3。
3.3 網(wǎng)絡構(gòu)建
去除無人機禁飛區(qū)和限高區(qū)內(nèi)的網(wǎng)點,在剩余43處營業(yè)點、4處集配站和1處集散中心的基礎上構(gòu)建江寧區(qū)物流無人機運輸網(wǎng)絡。PAM聚類算法對43處營業(yè)點進行聚類,以H4四旋翼無人機最大航程15 km為距離約束。對營業(yè)點層級網(wǎng)點聚類,遍歷不同簇數(shù)量并計算輪廓系數(shù),得到的輪廓系數(shù)折線圖如圖3(a)所示。當簇數(shù)量超過7時,出現(xiàn)單個網(wǎng)點為一簇的情況,此時該簇無法構(gòu)成軸輻式網(wǎng)絡,因此不考慮簇數(shù)量超過7的聚類情況。而在此之前的輪廓系數(shù)隨簇數(shù)量的增加而變大,選取最大輪廓系數(shù)所對應的簇數(shù),將營業(yè)點聚為7類,聚類結(jié)果如圖3(b)所示。
將各聚類中心作為樞紐點,分別構(gòu)建如圖4(a)所示的7個單樞紐嚴格軸輻式網(wǎng)絡。按照表1中的分類標準統(tǒng)計江寧區(qū)的各類風險區(qū)域,無人機最大航程lmax=20 km帶入式(6),求解前文建立的多目標規(guī)劃模型。從集配站級網(wǎng)點中選擇東善橋集配站和淳化集配站作為7個營業(yè)點聚類中心的樞紐點;進一步以中科路集散中心為兩集配站的樞紐點,構(gòu)建如圖4(b)所示的由三級嚴格軸輻式網(wǎng)絡組成的江寧區(qū)城市物流無人機配送網(wǎng)絡。
3.4 無人機配送網(wǎng)絡評價指標
3.4.1 指標選取
參考快遞運輸網(wǎng)絡和航線網(wǎng)絡評價指標并考慮無人機運行安全性,分別從配送時效性、網(wǎng)絡安全性、網(wǎng)絡結(jié)構(gòu)特征等3方面對物流無人機快遞配送網(wǎng)絡進行評價。
(1)配送時效性
平均路徑長度是網(wǎng)絡中所有節(jié)點間最短路徑的平均值,用于衡量網(wǎng)絡的傳輸性能和效率,計算公式:
d=∑i≠j∈Vdij/nn-1,(8)
式中,n為網(wǎng)絡中節(jié)點數(shù)量,dij為網(wǎng)絡中任意兩節(jié)點間距離。
(2)網(wǎng)絡安全性
網(wǎng)絡安全性由網(wǎng)絡中各條航線風險值的平均值的倒數(shù)表示(為方便在雷達圖中比較,將倒數(shù)乘以100以擴大數(shù)量級),計算公式:
θ=1(E/u)×100,(9)
式中,u為網(wǎng)絡中邊的數(shù)量。
(3)網(wǎng)絡結(jié)構(gòu)特征
節(jié)點的中心度指標包含點度中心度、接近中心度與中介中心度,分別反映節(jié)點i在整體網(wǎng)絡中的核心程度、與其他節(jié)點間的緊密程度以及銜接程度,數(shù)學表達式分別為式(10)~(12)。其中,ui為與節(jié)點i相連的邊的數(shù)量,dij為i、j兩點間最短路徑長度,gjk為網(wǎng)絡中兩點間最短路徑總數(shù),gjk(i)為經(jīng)過節(jié)點i的最短路徑,均可由Dijkstra算法計算得出。
網(wǎng)絡整體結(jié)構(gòu)則選取平均點度中心性CRD、平均接近中心性CRP、平均中介中心性CRB與點度中心勢CD、接近中心勢CP、中介中心勢評價CB,數(shù)學表達式分別為式(13)~(18)[16]。其中,CDmax、CPmax、CBmax為網(wǎng)絡中相應類別的最大中心度值。
CD(i)=ui/(n-1),(10)
CP(i)=(n-1)/∑jdij,(11)
CB(i)=∑j≠k≠igjk(i)/gjk2(n-1)(n-2),(12)
CRD=∑iCD(i)/n,(13)
CRP=∑iCP(i)/n,(14)
CRB=∑iCB(i)/n,(15)
CD=∑i(CDmax-CD(i))/n-2,(16)
CP=∑i(CPmax-CP(i))/n-1,(17)
CB=2n-3∑i(CBmax-CB(i))n-2n-1。(18)
3.4.2 評價分析
將去除了禁飛區(qū)內(nèi)網(wǎng)點的江寧區(qū)某快遞公司原地面配送網(wǎng)絡網(wǎng)點及運輸模式稱為原配送網(wǎng)絡,實驗中構(gòu)建的無人機配送網(wǎng)絡為新建配送網(wǎng)絡,均以無人機作為運輸工具進行配送,兩網(wǎng)絡中各項指標計算結(jié)果見表3,并結(jié)合圖5中各指標雷達圖進行對比分析。
對比新建配送網(wǎng)絡與原配送網(wǎng)絡,新建配送網(wǎng)絡在運輸時效性與運輸安全性方面均呈現(xiàn)更優(yōu)表現(xiàn),尤其在安全性方面得到顯著提高。網(wǎng)絡結(jié)構(gòu)方面,新建配送網(wǎng)絡平均點度中心性與平均接近中心性均高于原配送網(wǎng)絡,即網(wǎng)絡中各節(jié)點的連接更緊密,節(jié)點之間能更加快速地到達,相應的網(wǎng)絡運輸效率更高;多層級的嚴格軸輻式網(wǎng)絡結(jié)構(gòu)使得新建配送網(wǎng)絡具有較高的平均中介中心性,網(wǎng)絡中各節(jié)點在其他點之間調(diào)節(jié)能力和控制能力較強;此外,新建配送網(wǎng)絡的點度中心勢與中介中心勢較低,表明相比于原配送網(wǎng)絡,新建配送網(wǎng)絡中各點的中心度分布較均衡,且節(jié)點對樞紐依賴性較低,網(wǎng)絡魯棒性較好。
4 結(jié)語
為適應現(xiàn)有物流運輸模式、保障城市低空空域無人機安全有序運行,選擇多層級的嚴格軸輻式網(wǎng)絡結(jié)構(gòu),采用帶距離約束的PAM聚類和以運輸成本與運輸風險為目標的整數(shù)規(guī)劃模型,對地面快遞網(wǎng)點進行樞紐點的選址和軸輻式網(wǎng)絡的構(gòu)建。以南京市江寧區(qū)某快遞公司為例構(gòu)建無人機快遞運輸網(wǎng)絡,對比分析網(wǎng)絡評價指標,發(fā)現(xiàn)所構(gòu)建的無人機運輸網(wǎng)絡在兼顧運行成本與運行安全性的同時,相比于原配送網(wǎng)絡在網(wǎng)絡配送時效性方面也得到了提高。
研究中有以下幾個方面可在未來進行深入研究:第一,由于研究中僅考慮了無人機最大運輸距離、最大載荷等性能約束,所構(gòu)建的物流無人機軸輻式網(wǎng)絡僅為二維運輸網(wǎng)絡,在后續(xù)研究中可考慮無人機飛行高度等約束,構(gòu)建由飛行路徑所組成的三維城市物流無人機運輸網(wǎng)絡;第二,在構(gòu)建的網(wǎng)絡中以直線作為航線表示網(wǎng)點間分配關(guān)系,并未對障礙物避障、轉(zhuǎn)彎角等做詳細規(guī)劃,可在選址問題后銜接路徑規(guī)劃,進一步研究城市物流無人機的選址、路徑優(yōu)化問題。
參考文獻:
[1]姚虹翔, 葉博嘉, 程予. 低空無人機空中交通管理研究[J]. 科技創(chuàng)新與應用, 2021, 11(25): 183-187.
[2]VENKATESH N, PAYAN A, JUSTIN C Y, et al. Optimal siting of sub-urban air mobility (sUAM) ground architectures using network flow formulation[C]//American Institute of Aeronautics and Astronautic,Aviation 2020 Forum. Reston, USA: AIAA. 2020: 2921.DOI: 10.2514/6.2020-2921.
[3]錢欣悅, 張洪海, 張芳, 等. 末端配送物流無人機起降點選址分配問題研究[J]. 武漢理工大學學報(交通科學與工程版), 2021, 45(4): 682-687. DOI: 10.3963/j.issn.2095-3844.2021.04.013.
[4]任新惠, 王柳. 即時配送下無人機全自動機場分區(qū)選址模型[J]. 計算機工程與應用, 2021, 57(10): 266-272. DOI: 10.3778/j.issn.1002-8331.2003-0433.
[5]CHAUHAN DARSHAN R, AVINASHU, MIGUELF, et al. Robust maximum coverage facility location problem with drones considering uncertainties in battery availability and consumption[J]. Transportation Research Record, 2021, 2675(2): 25-39.
[6]FENG D K, ZHANG HH, LIU H, et al. Research on location of logistics UAV airport in urban environment[C]// 6th International Conference on Information Science, Computer Technology and Transportation. Xishuangbanna, China: VDE, 2022: 1-5.
[7]LI S, ZHANG HH, LI Z L, et al. An air route network planning model of logistics UAV terminal distribution in urban low altitude airspace[J]. Sustainability, 2021, 13(23): 13079. DOI: 10.3390/su132313079.
[8]張洪海, 馮棣坤, 張曉瑋, 等. 城市物流無人機起降點布局規(guī)劃研究[J]. 交通運輸系統(tǒng)工程與信息, 2022, 22(3): 207-214. DOI: 10.16097/j.cnki.1009-6744.2022.03.023.
[9]ZHANG X J, LIU Y, ZHANG Y, et al. Safety assessment and risk estimation for unmanned aerial vehicles operating in national airspace system[J]. Journal of Advanced Transportation, 2018, 2018(Pt.6):4731585. DOI: 10.1155/2018/4731585.
[10]胡莘婷, 戴福青. 基于城區(qū)行人安全的無人機運行風險評估[J]. 中國安全科學學報, 2020, 30(8): 137-142. DOI: 10.16265/j.cnki.issn1003-3033.2020.08.020.
[11]鐘罡, 勵瑾, 張曉瑋, 等. 物流無人機對地風險評估方法研究[J]. 交通運輸系統(tǒng)工程與信息,2022,22(4): 246-254. DOI:10.16097/j.cnki.1009-6744.2022.04.028.
[12]李鵬飛, 彪蔚然. 快遞網(wǎng)絡結(jié)構(gòu)研究進展[J]. 西安郵電大學學報, 2020, 25(1): 34-41. DOI: 10.13682/j.issn.2095-6533.2020.01.004.
[13]中國民用航空局空管行業(yè)管理辦公室.城市場景輕小型無人駕駛航空器物流航線劃設規(guī)范: MH/T 4054-2022[S].北京: 中國民航出版社, 2022.
[14]中國民用航空局. 無人駕駛航空器飛行管理暫行條例[EB/OL].[2023-01-17].https://www.gov.cn/zhengce/content/202306/content_6888799.htm.
[15]中通研究院. “末端+支線”無人機運營場景成本分析[EB/OL].[2023-01-16].http://hkjjyjzx.zua.edu.cn/info/1066/1264.htm.
[16]陳欣, 李心茹, 盛寅. 基于復雜網(wǎng)絡的長三角航線網(wǎng)絡結(jié)構(gòu)特征分析[J]. 交通信息與安全, 2020, 38(4): 139-146. DOI: 10.3963/j.jssn.1674-4861.2020.04.017.
猜你喜歡
電腦知識與技術(shù)(2016年28期)2016-12-21 12:21:32
電子技術(shù)與軟件工程(2016年19期)2016-12-19 18:28:28
新教育時代·教師版(2016年27期)2016-12-06 18:14:59
中國科技縱橫(2016年17期)2016-11-30 11:51:57
農(nóng)機使用與維修(2016年10期)2016-11-10 09:45:55
人間(2016年26期)2016-11-03 17:52:40
中國科技博覽(2016年22期)2016-11-01 18:10:31
科技視界(2016年22期)2016-10-18 14:30:27
企業(yè)導報(2016年9期)2016-05-26 20:58:26
