粒子群優(yōu)化算法計(jì)算數(shù)控加工逼近誤差研究
2023-12-15 04:28:48李鵬飛張子煜王天力范呂陽(yáng)
關(guān)鍵詞:優(yōu)化
李鵬飛,劉 威,2,張子煜,王天力,范呂陽(yáng)
(1.蘇州科技大學(xué) 機(jī)械工程學(xué)院,江蘇 蘇州 215011;2.蘇州科技大學(xué) 天平學(xué)院,江蘇 蘇州 215011)
在數(shù)控加工刀軌生成中,逼近誤差是指在進(jìn)給方向上刀具從一個(gè)刀位點(diǎn)運(yùn)動(dòng)到下一個(gè)刀位點(diǎn)形成的包絡(luò)面與刀觸點(diǎn)軌跡線之間的最大誤差,逼近誤差與相鄰刀觸點(diǎn)、刀位點(diǎn)的距離(即步長(zhǎng))正相關(guān)。步長(zhǎng)規(guī)劃方法主要有等參數(shù)法、等距法、步長(zhǎng)篩選法和等誤差步長(zhǎng)法[1-3]。
在三軸球頭刀精加工中,逼近誤差計(jì)算的實(shí)質(zhì)是在刀觸點(diǎn)軌跡線上搜索一刀觸點(diǎn),此刀觸點(diǎn)到刀位點(diǎn)連線的距離為最值,是典型的多目標(biāo)優(yōu)化問題。目前計(jì)算逼近誤差一般采用幾何迭代法[4-6],其原理在提高計(jì)算效率方面的瓶頸,導(dǎo)致需要大量逼近誤差計(jì)算的高精度刀軌和等誤差刀軌的生成時(shí)間難以減少。
智能算法是對(duì)生物群體協(xié)同搜索機(jī)制和物理原理驅(qū)動(dòng)下的變化現(xiàn)象抽象、提煉出的優(yōu)化算法,在全局尋優(yōu)的精度和效率上比傳統(tǒng)的迭代法優(yōu)勢(shì)明顯[7-9],理論上能夠用于在刀觸點(diǎn)軌跡線上搜索與刀位點(diǎn)連線的距離為最值的點(diǎn)。
作為應(yīng)用最廣泛的智能算法之一,粒子群算法[10]模擬鳥群或蜂群的覓食行為進(jìn)行最優(yōu)解搜索,算法思路清晰、計(jì)算高效,被廣泛應(yīng)用于多個(gè)領(lǐng)域[11-13]。但粒子群算法易過早收斂、陷入局部最優(yōu)[14],為此,文獻(xiàn)[15]提出了帶約束因子的粒子群優(yōu)化算法,以提高算法靈活性和收斂速度。文獻(xiàn)[16-19]則對(duì)慣性權(quán)重的變化分別提出了模糊系統(tǒng)動(dòng)態(tài)調(diào)整、線性遞減、隨機(jī)慣性、非線性遞減的優(yōu)化策略,以保持局部最優(yōu)和全局最優(yōu)之間的平衡。文獻(xiàn)[20]提出一種跟隨非線性慣性權(quán)重系數(shù)變化的動(dòng)態(tài)學(xué)習(xí)因子,以提高算法的全局搜索能力和局部搜索精度。
受粒子群算法、逼近誤差計(jì)算過程原理相似和上述研究成果啟發(fā),本文建立逼近誤差計(jì)算的刀觸點(diǎn)區(qū)間與粒子搜索區(qū)間之間的映射關(guān)系,提出逼近誤差適應(yīng)度函數(shù)、慣性權(quán)重因子和學(xué)習(xí)因子的創(chuàng)建和優(yōu)化方法,最終完成整個(gè)粒子群算法的構(gòu)造,實(shí)現(xiàn)逼近誤差的高效計(jì)算。
1 逼近誤差與粒子群算法基本原理
1.1 逼近誤差幾何原理
現(xiàn)有方法常以刀觸點(diǎn)軌跡線上的弦弧之間的弓高誤差近似作為逼近誤差[21],如圖1 所示,一般將相鄰兩刀觸點(diǎn)PiCC、Pi+1CC間的刀觸點(diǎn)軌跡線視為等半徑圓弧,即Ri=Ri+1。已知弓高誤差最大允許值eG、刀觸點(diǎn)PiCC及其曲率半徑Ri,由勾股定理可得式(1),變換可得式(2)并求出步長(zhǎng)Di。然而真實(shí)的逼近誤差是刀具包絡(luò)面與刀觸點(diǎn)軌跡線之間的誤差,刀觸點(diǎn)軌跡線曲率越大,與弓高誤差之間的差值越大。且在凸區(qū)域時(shí),真實(shí)逼近誤差大于弓高誤差,凹區(qū)域時(shí)小于弓高誤差。
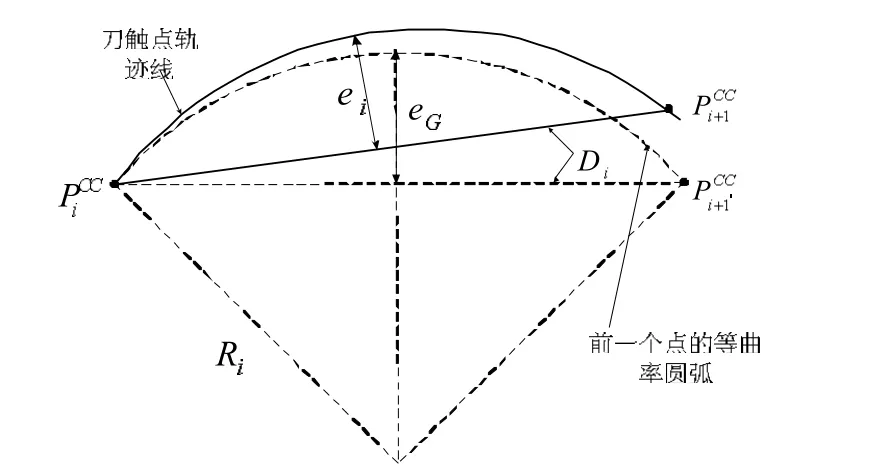
圖1 弓高誤差示意圖
在三軸精加工中,球頭刀包絡(luò)面為以相鄰刀位點(diǎn)連線為軸線,半徑為R 的圓柱體,相鄰刀位點(diǎn)PiCL和Pi+1CL之間的真實(shí)逼近誤差ei如圖2 所示,其中PiCC、Pi+1CC為刀觸點(diǎn),點(diǎn)pj為刀觸點(diǎn)軌跡線上與PiCL、Pi+1CL距離最小的點(diǎn),逼近誤差ei可由式(3)表示。
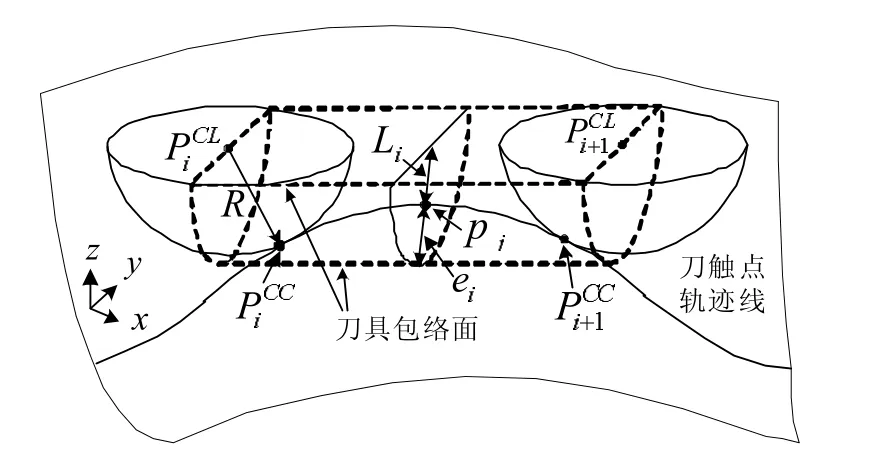
圖2 逼近誤差示意圖
其中,R 為球頭刀半徑,Li為刀觸點(diǎn)線上的點(diǎn)pj到線段PiCLPi+1CL的距離。
真實(shí)誤差計(jì)算過程可視為在刀觸點(diǎn)軌跡線上搜索到刀位點(diǎn)連線距離為最值的特定數(shù)據(jù)點(diǎn)的過程,現(xiàn)有常用方法離散法是在刀觸點(diǎn)軌跡線上獲取離散數(shù)據(jù)點(diǎn)并進(jìn)行計(jì)算,但需生成大量離散數(shù)據(jù)點(diǎn)才能滿足高精度要求,計(jì)算效率難以提高已成為真實(shí)誤差廣泛應(yīng)用的最大瓶頸。
1.2 粒子群算法
粒子群算法的每個(gè)粒子都具有由適應(yīng)度函數(shù)決定的適應(yīng)值,粒子在每次迭代中不斷更新,并逐漸接近理論最優(yōu)粒子及其最優(yōu)解。
設(shè)在一個(gè)D 維搜索空間中有N 個(gè)粒子,第i 個(gè)粒子的位置和“飛行”速度如式(4)和(5)所示,歷次迭代搜索到的個(gè)體最優(yōu)值位置參數(shù)pbest可由式(6)表示,歷次迭代搜索到的種群最優(yōu)值位置參數(shù)可由式(7)表示。
第k 代的第i 個(gè)粒子的第d 維向第k+1 代進(jìn)化時(shí)速度和位置的更新如式(8)所示,其中d=1,2,3,…,D,w 為慣性權(quán)重因子,c1、c2分別為個(gè)體、群體學(xué)習(xí)因子,、r1、r2(0,1)之間相互獨(dú)立的隨機(jī)數(shù),f 為適應(yīng)度函數(shù),粒子群中兩個(gè)極值pbest和gbest由式(9)和(10)求出。隨著迭代次數(shù)的增加,所獲得的極值逐漸逼近理論解,一般以迭代次數(shù)上限或極值變化量(即計(jì)算精度)為終止條件結(jié)束算法。
2 融合逼近誤差計(jì)算原理的粒子群算法優(yōu)化
逼近誤差的計(jì)算過程是在相鄰刀觸點(diǎn)之間搜索距離最值的過程,與粒子群算法相同,也是一種全局尋優(yōu)過程。為了實(shí)現(xiàn)運(yùn)用粒子群算法計(jì)算逼近誤差,提出適應(yīng)度函數(shù)、粒子搜索區(qū)間、慣性權(quán)重和學(xué)習(xí)因子的建立和優(yōu)化方法。本節(jié)以任意一行刀觸點(diǎn)軌跡CC 中第i 個(gè)和i+1 個(gè)刀觸點(diǎn)PiCC、Pi+1CC及其刀位點(diǎn)PiCL、Pi+1CC為例闡述算法。
2.1 設(shè)置粒子搜索區(qū)間
令刀觸點(diǎn)PiCC、Pi+1CC在刀觸點(diǎn)軌跡線上的參數(shù)分別為ui、ui+1,則逼近誤差所對(duì)應(yīng)的點(diǎn)位于區(qū)間[ui、ui+1]的局部刀觸點(diǎn)軌跡線上。與點(diǎn)坐標(biāo)相比,參數(shù)u 僅一維,且直接決定點(diǎn)的相對(duì)位置和坐標(biāo),更適合作為粒子。為了提高算法的規(guī)范性和普適性,提出將局部刀觸點(diǎn)軌跡線映射到標(biāo)準(zhǔn)區(qū)間[0,1],以[0,1]內(nèi)的離散數(shù)值作為實(shí)際計(jì)算的粒子。任意刀觸點(diǎn)軌跡線上的點(diǎn)pj的粒子mj可由式(11)求出,映射過程如圖3 所示。

圖3 刀觸點(diǎn)映射到標(biāo)準(zhǔn)區(qū)間示意圖
2.2 建立逼近誤差的適應(yīng)度函數(shù)
由式(3)可知,刀位點(diǎn)PiCL、Pi+1CL之間的逼近誤差是刀觸點(diǎn)PiCC、Pi+1CC之間的刀觸點(diǎn)軌跡到線段PiCLPi+1CL的距離與刀具半徑R 差值的最值,因此兩者之間的差值是理想的適應(yīng)度函數(shù)。對(duì)于區(qū)間[0,1]內(nèi)的任意第j 個(gè)粒子mj,其適應(yīng)度的計(jì)算流程如下:
步驟1:運(yùn)用式(12)計(jì)算出粒子mj所對(duì)應(yīng)的刀觸點(diǎn)的參數(shù)值uj,代入式(13)計(jì)算出參數(shù)值uj在刀觸點(diǎn)軌跡線CC 上對(duì)應(yīng)的點(diǎn)pj。
步驟2:運(yùn)用式(3)計(jì)算出刀觸點(diǎn)到刀位點(diǎn)連線之間的距離Lj。
步驟3:運(yùn)用式(14)計(jì)算出粒子mj的適應(yīng)度值。
2.3 優(yōu)化慣性權(quán)重
粒子群算法的初期一般需要較大的慣性權(quán)重因子以獲得較強(qiáng)的全局搜索能力,并隨著迭代次數(shù)增加遞減,從而加快粒子收斂到全局最優(yōu)[22]。
為了解決常用的慣性權(quán)重線性遞減方法在前期全局搜索能力弱的不足,本文利用余弦曲線在區(qū)間[0,π/2]內(nèi)的前、中、后段下降速度由慢到快的非線性特點(diǎn),提出將粒子群優(yōu)化算法的迭代次數(shù)映射到此區(qū)間,獲得的慣性權(quán)重函數(shù)如式(15)所示,其中k 為迭代次數(shù),wmax、wmin為慣性權(quán)重系數(shù)最大、最小值。此函數(shù)能夠在搜索初期、中期、后期分別獲得較慢、較快、快速的慣性權(quán)重下降速度,從而使粒子的全局搜索能力在初期時(shí)較強(qiáng),隨后逐漸減弱,而局部搜索能力逐漸增強(qiáng)。
2.4 優(yōu)化學(xué)習(xí)因子
個(gè)體、群體學(xué)習(xí)因子,分別決定了自身、群體最優(yōu)位置在粒子飛行速度計(jì)算中的權(quán)重,當(dāng)時(shí),粒子的運(yùn)動(dòng)更偏向個(gè)體最優(yōu)方向,反之則更偏向群體最優(yōu)方向。
在迭代初期,由于距離最優(yōu)解較遠(yuǎn),粒子應(yīng)注重自我認(rèn)知,根據(jù)個(gè)體最優(yōu)解進(jìn)行搜索;在迭代中后期,粒子較為接近最優(yōu)解,應(yīng)注重群體認(rèn)識(shí),側(cè)重群體最優(yōu)解鄰域的局部搜索。為此,本文對(duì)學(xué)習(xí)因子采用線性變化的策略,計(jì)算式(16)所示,其中c1max、c1min、c2max和c2min分別為個(gè)體、群體學(xué)習(xí)因子的最大、最小值,隨著迭代次數(shù)k 的增加,c1、c2分別減小、增大。
3 粒子群優(yōu)化算法構(gòu)建
本節(jié)基于上述逼近誤差和粒子群算法的原理和優(yōu)化方法,設(shè)計(jì)基于粒子群優(yōu)化算法的逼近誤差計(jì)算流程。通過計(jì)算粒子適應(yīng)度值,迭代求出最優(yōu)粒子及其最優(yōu)適應(yīng)度值,以設(shè)置的計(jì)算精度作為計(jì)算終止條件,最后輸出最優(yōu)解作為逼近誤差。整個(gè)計(jì)算流程示意圖如圖4 所示,詳細(xì)過程如下:

圖4 逼近誤差計(jì)算流程圖
步驟1:將搜索區(qū)間[ui,ui+1]映射到[0,1],設(shè)置種群規(guī)模N、速度閾值vmax、vmin和計(jì)算精度。
步驟2:隨機(jī)所有粒子的初始位置和初始速度。
步驟3:根據(jù)2.2 節(jié)計(jì)算出粒子的適應(yīng)度值獲得群體最優(yōu)粒子gbest。
步驟4:以式(15)自適應(yīng)改變慣性權(quán)重w,根據(jù)式(16)自適應(yīng)改變學(xué)習(xí)因子c1、c2。
步驟5:以式(8)更新粒子速度和位置。
步驟6:根據(jù)2.2 節(jié)計(jì)算出粒子的適應(yīng)度值。
步驟7:以式(9)和(10)更新個(gè)體最優(yōu)pbest和全局最優(yōu)gbest。
步驟8:如果滿足計(jì)算精度,轉(zhuǎn)到步驟9,否則轉(zhuǎn)到步驟3 繼續(xù)迭代。
步驟9:輸出當(dāng)前最優(yōu)粒子位置和適應(yīng)度值,即最大逼近誤差位置和逼近誤差值,算法終止。
4 算法實(shí)現(xiàn)與驗(yàn)證
4.1 算法實(shí)現(xiàn)
算法運(yùn)算過程中,慣性權(quán)重最大最小值wmax和wmin的取值對(duì)算法性能影響很大,然而取值并無明確的理論依據(jù),多采用實(shí)驗(yàn)法選值,常將其設(shè)置在0.4 到0.9 之間[23]。算法選用了多組數(shù)值進(jìn)行測(cè)試,當(dāng)wmax=0.9、wmin=0.4 時(shí),性能提高明顯,代入式(15)獲得慣性權(quán)重w 計(jì)算式,隨迭代次數(shù)k 的變化如圖5 所示。
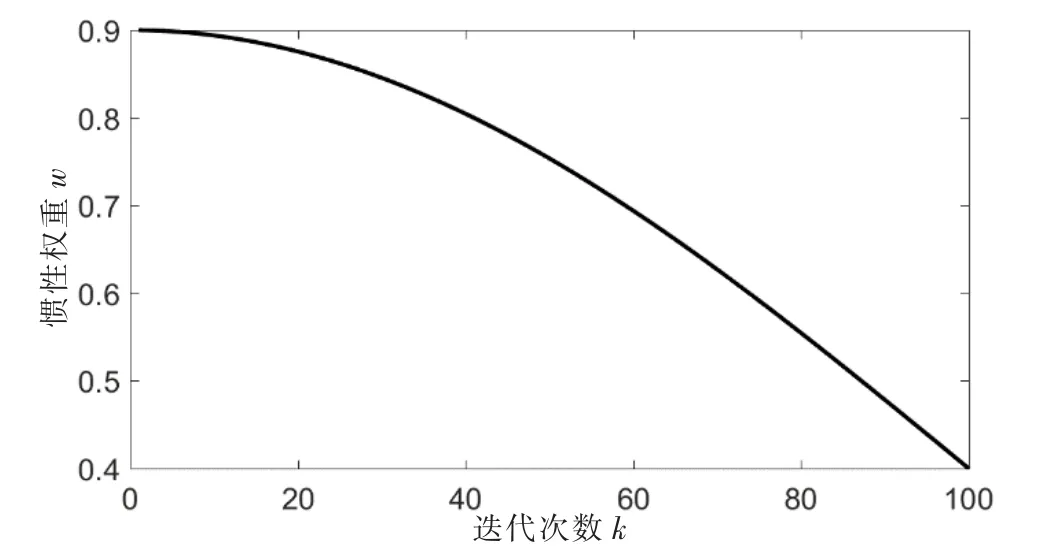
圖5 慣性權(quán)重變化圖
與慣性權(quán)重類似,常將個(gè)體、群體學(xué)習(xí)因子的最大、最小值c1max、c1min、c2max和c2min設(shè)置為2[23]。本文結(jié)合優(yōu)化后慣性權(quán)重的變化趨勢(shì),選用了多組數(shù)值組合進(jìn)行了測(cè)試,當(dāng)c1max=2.5、c1min=1.6、c2max=2.2、c2min=1.3 時(shí),學(xué)習(xí)因子變化如圖6 所示,滿足了前中期加強(qiáng)粒子運(yùn)動(dòng)遍歷性、全局搜索能力和后期加強(qiáng)局部搜索能力的要求。

圖6 學(xué)習(xí)因子變化圖
完成上述數(shù)值選取后,在課題組自主開發(fā)的CAM 軟件上完成了所有算法的程序開發(fā),實(shí)現(xiàn)了逼近誤差計(jì)算功能。
4.2 算法驗(yàn)證
以圖7(a)中的曲面為例生成刀軌,曲面尺寸為120 mm×120 mm×45 mm,刀具為直徑10 mm 的球頭刀,刀軌行數(shù)為80,按照等誤差步長(zhǎng)法生成刀軌,計(jì)算精度為0.1。分別采用幾何迭代算法[6]和本文算法進(jìn)行等誤差刀軌計(jì)算,生成的逼近誤差范圍為9~10 的等誤差刀軌如圖7(b)所示,再取4 種不同范圍逼近誤差進(jìn)行計(jì)算,運(yùn)行環(huán)境為Intel i7-10700、16G RAM 的計(jì)算機(jī),所消耗的時(shí)間見表1,本文算法比幾何迭代算法的計(jì)算時(shí)間減少了16%以上,對(duì)比標(biāo)準(zhǔn)粒子群優(yōu)化算法的計(jì)算時(shí)間減少了7%以上,驗(yàn)證了在計(jì)算效率上的優(yōu)勢(shì)。

圖7 自由曲面與生成的等誤差刀軌
5 結(jié)論
為了提高數(shù)控加工中逼近誤差的計(jì)算效率,本文對(duì)粒子群優(yōu)化算法計(jì)算逼近誤差進(jìn)行了研究。為了提高算法普適性,將刀觸點(diǎn)軌跡線上搜索范圍映射到標(biāo)準(zhǔn)區(qū)間,提出了適應(yīng)度函數(shù),優(yōu)化了慣性權(quán)重因子和學(xué)習(xí)因子的變化策略。實(shí)驗(yàn)結(jié)果表明,所提出的算法耗時(shí)更短。在未來的研究中,可進(jìn)一步在結(jié)構(gòu)、參數(shù)優(yōu)化等方面改進(jìn)算法,或探索其它類型的智能算法,以提高逼近誤差的計(jì)算效率。
猜你喜歡
房地產(chǎn)導(dǎo)刊(2022年5期)2022-06-01 06:20:14
能源工程(2022年1期)2022-03-29 01:06:28
建材發(fā)展導(dǎo)向(2021年12期)2021-07-22 08:06:48
建材發(fā)展導(dǎo)向(2021年7期)2021-07-16 07:07:52
中學(xué)生數(shù)理化(高中版.高二數(shù)學(xué))(2021年12期)2021-04-26 07:43:48
中學(xué)生數(shù)理化(高中版.高考數(shù)學(xué))(2021年12期)2021-03-08 01:28:50
今日農(nóng)業(yè)(2020年16期)2020-12-14 15:04:59
消費(fèi)導(dǎo)刊(2018年8期)2018-05-25 13:20:08
家庭影院技術(shù)(2018年4期)2018-05-09 07:07:41
電子制作(2017年20期)2017-04-26 06:57:45
 蘇州科技大學(xué)學(xué)報(bào)(工程技術(shù)版)2023年4期
蘇州科技大學(xué)學(xué)報(bào)(工程技術(shù)版)2023年4期
- 蘇州科技大學(xué)學(xué)報(bào)(工程技術(shù)版)的其它文章
- 基于模糊層次分析法的高校應(yīng)急能力評(píng)價(jià)模型
- 基于出行成本和步行可達(dá)性的蘇州市中心城區(qū)社區(qū)公園布局評(píng)價(jià)研究
- 城市更新行動(dòng)計(jì)劃的認(rèn)知與編制思路探索
——基于北京、天津、廣州的比較研究 - 新能源汽車車聯(lián)網(wǎng)關(guān)鍵技術(shù)與網(wǎng)聯(lián)控制平臺(tái)的設(shè)計(jì)實(shí)現(xiàn)研究
- 藻類對(duì)蘭江水混凝處理效果的影響
- 哈爾濱近代鐵路建筑遺產(chǎn)普查及保護(hù)策略研究