基于滑模變結構的虛擬總軸控制策略研究
2023-12-05 18:21:45肖園園張墩利李曄
科技資訊 2023年22期
肖園園 張墩利 李曄

摘要:印刷過程中高精度的套印取決于預套準階段對調節輥的精準定位。針對摩擦對套印精度的影響,以及擾動對同步精度的影響,提出了基于滑模變結構的虛擬總軸控制策略,并利用李亞普諾夫函數證明了該控制算法的穩定性。實驗結果表明所提出的控制策略不但能夠有效的擾動及預套準階段摩擦對系統跟隨性能的影響,而且能提高無軸傳動印刷機的同步控制精度。
關鍵詞:預套準? 套印精度? 摩擦? 虛擬總軸? 滑模變結構
中圖分類號:TP273??? 文獻標識碼:A
Research on the Strategy for Virtual-Shaft Control Based on Sliding Mode Variable Structure
XIAO Yuanyuan? ZHANG Dunli? LI Ye
(Hunan?Open?University, Changsha, Hunan Province, 410004 China)
Abstract: High-precision overprinting during printing depends on the precise positioning of the adjustment roller during the preregistration phase. Aiming atthe influence of friction on registering precision and the influence of disturbance on synchronous precision, this paper puts forward the strategy for virtual-shaft control based on sliding mode variable structure, and proves the stability of the control algorithm by using the Lyapunov function. The experimental results demonstrate that the control strategy proposed by this paper can not only effectively disturb the influence of fiction on the following performance of the system in the preregistration stage, but also improve the synchronous control accuracy of the shaftless driving printing machine.
Key Words: Preregistration; Registering precision; Friction; Virtual line shaft; Sliding mode variable structure
無軸傳動技術廣泛應用于新能源汽車、數控機床、印刷、造紙、紡織、冶金等各個領域,其制成品又延伸到航空航天、軌道交通、海工裝備等高端裝備制造領域,對于保衛國防安全和百姓安居樂業具有重要意義[1]。無軸傳動技術被應用在工業生產中的關鍵在于,如何設計合理的同步控制策略,來克服生產過程中非線性和干擾對同步精度的影響。
為了彌補主令控制存在的不足,Lorenz 和Meyer在1999年提出了電子虛擬總軸控制方法,Valenzuela 和Lorenz對其做了進一步的發展[2]。為了模擬機械總軸的物理特性,在主令控制的基礎上,虛擬總軸控制引入了主令控制缺少的扭轉力矩反饋環節,從而具有與機械總軸相似的固有同步特性,因而被廣泛應用于實際工程中[3]。
無軸傳動印刷機主要通過獨立驅動的伺服電機帶動各印輥進行同步協調運行,在出現色差時進行套準控制[4],這就使得系統對多軸同步控制提出更高的要求。滑模變結構控制是一種不連續非線性控制,在滑模面上運動時系統具有比魯棒性更加優越的不變性[5,6]。加之算法簡單、實時性強、易于工程實現,其在高精度跟隨控制中的應用引起了極大的關注[7]。
摩擦是影響無軸傳動印刷系統低速性能的重要因素,它不但生成穩態誤差,影響套準精度還會使系統出現振蕩。本文針對摩擦對套印精度的影響,以及擾動對同步精度的影響,提出了基于滑模變結構的虛擬總軸控制策略,并利用Lyapunov定理證明了該算法的穩定性。在Matlab實驗平臺上對包括虛擬主軸在內的四軸凹版印刷系統進行了仿真驗證,實驗結果證明了基于滑模變結構的虛擬總軸同步策略的有效性。
1 系統的數學模型
2 多軸同步系統的設計
在無軸傳動印刷機的同步控制系統中,除了要設計有效的同步控制算法保證單軸伺服系統的跟蹤精度和魯棒性能外;還必須考慮各個軸之間精確同步的要求,即保證各個軸之間的速度同步和位置同步(即協同控制)。
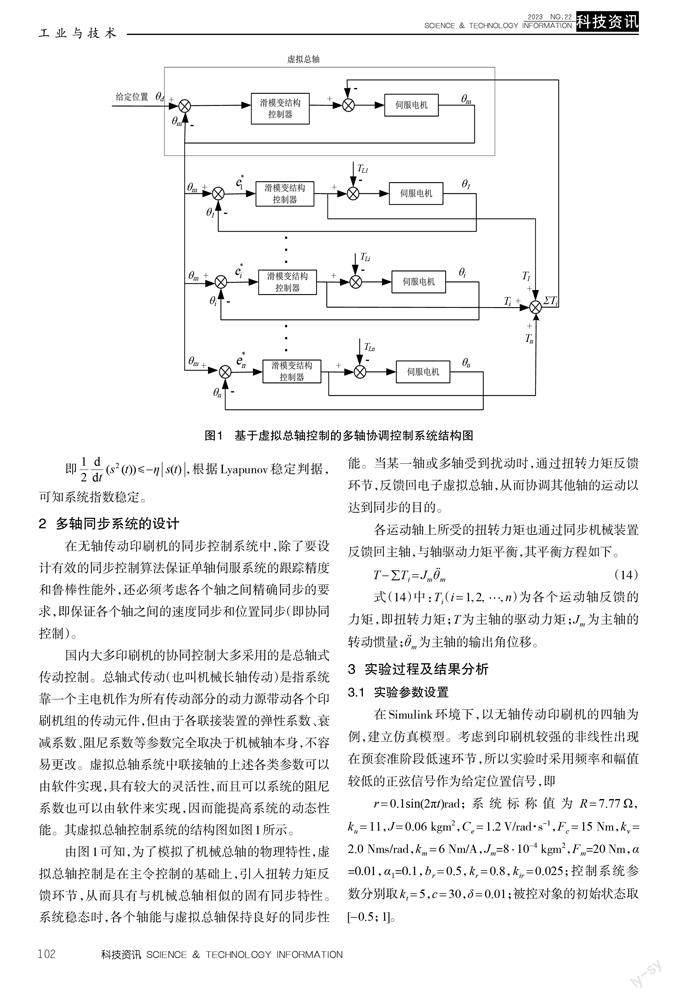
國內大多印刷機的協同控制大多采用的是總軸式傳動控制。總軸式傳動(也叫機械長軸傳動)是指系統靠一個主電機作為所有傳動部分的動力源帶動各個印刷機組的傳動元件,但由于各聯接裝置的彈性系數、衰減系數、阻尼系數等參數完全取決于機械軸本身,不容易更改。虛擬總軸系統中聯接軸的上述各類參數可以由軟件實現,具有較大的靈活性,而且可以系統的阻尼系數可以軟件,因而能提高系統的動態性能。其虛擬總軸控制系統的結構圖如圖1所示。
3 實驗過程及結果分析
3.1 實驗參數設置
3.2 實驗結果分析
2s時在從軸1增加一個大小為5N·m的負載轉矩,各軸的跟蹤誤差和同步誤差如圖2所示。滑模變結構控制器對從軸發生外部擾動仍然具有快速的跟蹤性能,且同步誤差收斂速度快。仍然能夠滿足無軸傳動印刷機高性能的要求。
上述仿真結果表明:虛擬總軸控制系統雖然以喪失系統跟隨性能為代價,但系統獲得了良好的同步性能,對于印刷設備,各個軸之間的同步更加重要。此外,滑模變結構控制器使系統在有擾動的情況下,仍能保持穩定的運行狀態,提高了系統的魯棒性能和同步性能。
5 結語
(1)針對無軸傳動印刷機預套準低速運行階段摩擦對套準精度的影響,提出了基于滑模變結構的虛擬總軸控制策略,提高了系統的套印精度,減小了系統的套印誤差。
(2)針對干擾和非線性對印刷過程同步精度的影響,為每個軸設計了滑模變結構控制器,使得同步誤差和跟蹤誤差在有限的時間內收斂于零。
(3)實驗驗結果證明了基于滑模變結構的虛擬總軸控制策略策略,能夠有效改善低速預套準階段摩擦對套準精度的影響,同時該控制策略有效改善了系統參數攝動及外界擾動對系統同步性能的影響。
參考文獻
[1] 宋振飛.多電機無軸傳動系統同步控制技術研究[D].濟南:濟南大學,2021.
[2] Perez-Pinal F J,Calderon G, Araujo-Vargas I.Relative Coupling Strategy[C].IEEE International Electric Machines and Drives Conference.Madison,2003:1162-1166.
[3] CHEN Y,?DONG Z P,?LIU C H. Combined Cross-Coupled and Electronic Virtual Line Shafting Control for Dual-Motor System[C]. IECON 2022 – 48th Annual Conference of the IEEE Industrial Electronics Society,2022: 1246-1250.
[4] 湯雨雷.多電機同步控制系統研究與設計[D].西安:西安工業大學,2019.
[5] SABANOVIC A. Variable structure systems with sliding modes in motion control a survey[J]. IEEE Trans. Industrial Informatics,2011,7(2): 212-223.
[6] 何奕恒.基于滑模觀測器的不匹配系統故障降階重構方法研究[D].株洲:湖南工業大學,2022.
[7] 袁敞,畢嘉亮,陳虎,等.多虛擬同步機系統的自適應滑模變結構控制方法[J].電力系統保護與控制,2023,51(8):26-36.