基于遞推最小二乘法的閥控缸液壓系統(tǒng)控制策略*
2023-11-27 01:52:42張海洋王志科
機(jī)電工程 2023年11期
張海洋,梁 全,王志科,徐 威
(沈陽(yáng)工業(yè)大學(xué) 機(jī)械工程學(xué)院,遼寧 沈陽(yáng) 110870)
0 引 言
閥控缸液壓系統(tǒng)是電液伺服[1]系統(tǒng)的一個(gè)重要分支。因具有輸出功率大、響應(yīng)速度快、系統(tǒng)剛度大等優(yōu)點(diǎn),閥控缸液壓系統(tǒng)在液壓機(jī)器人、主動(dòng)懸架等產(chǎn)品設(shè)備上得到了廣泛應(yīng)用[2-3]。
由于閥控缸液壓系統(tǒng)具有非線性、時(shí)變性的特點(diǎn),其中的非線性因素和參數(shù)時(shí)變性嚴(yán)重影響了系統(tǒng)的控制性能[4-5]。通常閥控缸液壓系統(tǒng)采用PID控制[6-7],而傳統(tǒng)PID控制無(wú)法用于實(shí)時(shí)調(diào)節(jié)參數(shù),不能有效地對(duì)非線性系統(tǒng)進(jìn)行位置控制。因此,研究閥控缸液壓系統(tǒng)的非線性控制策略具有重要意義。
反步法是魯棒性較強(qiáng)的一種非線性控制方法,特別適合應(yīng)用在高階參數(shù)嚴(yán)反饋形式的系統(tǒng)中[8-9]。但反步法的控制效果高度依賴系統(tǒng)的動(dòng)態(tài)模型及參數(shù)的準(zhǔn)確性,通常要結(jié)合自適應(yīng)控制或采用系統(tǒng)辨識(shí)方法,才能獲得系統(tǒng)精確的模型參數(shù)。
為此,眾多學(xué)者在這些方面做了許多研究工作。LI Shu-jiang等人[10]在有無(wú)自適應(yīng)律情況下,對(duì)雙非對(duì)稱液壓缸伺服系統(tǒng)的控制性能進(jìn)行了對(duì)比仿真,并指出,具有自適應(yīng)律的控制算法魯棒性更優(yōu);但經(jīng)仿真試驗(yàn)得出的結(jié)果缺乏物理實(shí)驗(yàn)的驗(yàn)證。王坤等人[11]設(shè)計(jì)了一種自適應(yīng)反步滑膜控制器,借此對(duì)電液力加載系統(tǒng)進(jìn)行了仿真實(shí)驗(yàn),實(shí)驗(yàn)結(jié)果證明,該控制器提高了力加載控制精度;但控制器未考慮實(shí)際噪聲等因素,沒(méi)有解決傳統(tǒng)反步法微分難求的問(wèn)題。LEE K H等人[12]提出了一種用于電液伺服系統(tǒng)前饋位置控制的在線辨識(shí)算法;但由于其采用線性控制方法,其實(shí)際應(yīng)用范圍受到了較大的限制。劉匯等人[13]為提高某重型機(jī)械臂驅(qū)動(dòng)的電液系統(tǒng)控制精度,提出了一種采用神經(jīng)網(wǎng)絡(luò)算法辨識(shí)外部動(dòng)態(tài)負(fù)載和離線辨識(shí)系統(tǒng)內(nèi)部慢時(shí)變參數(shù)的方法,并根據(jù)辨識(shí)結(jié)果進(jìn)行了反步法控制器設(shè)計(jì),實(shí)驗(yàn)結(jié)果表明,反步法控制器提高了機(jī)械臂的位置跟蹤精度;但采用虛擬控制器控制實(shí)物,存在較嚴(yán)重的軟、硬件環(huán)境不匹配的問(wèn)題。SHEN Jin-xing等人[14]將模糊算法引入更新帶遺忘因子的RLS算法中,提出了基于Hammerstein模型的自適應(yīng)辨識(shí)算法,通過(guò)對(duì)挖掘機(jī)電液伺服系統(tǒng)的控制試驗(yàn),證明了自適應(yīng)辨識(shí)算法的可行性;但由于模型忽略了關(guān)鍵參數(shù)的時(shí)變特性,導(dǎo)致控制試驗(yàn)仍存在較大的誤差域。
然而,針對(duì)反步控制算法迭代計(jì)算產(chǎn)生的“微分爆炸”情況,學(xué)者們進(jìn)一步提出采用動(dòng)態(tài)面控制對(duì)反步法進(jìn)行改進(jìn)。
LIU Yong-hua等人[15]提出了一種自適應(yīng)動(dòng)態(tài)曲面控制方法,對(duì)每一步反步法設(shè)計(jì)都引入了一階滑動(dòng)濾波器;但對(duì)于高階的被控系統(tǒng),則需要采用真實(shí)控制器進(jìn)行驗(yàn)證。劉榮貴等人[16]為保證多電機(jī)伺服系統(tǒng)同步控制誤差收斂,采用了動(dòng)態(tài)面控制技術(shù)以改進(jìn)傳統(tǒng)反步法,減少了微分計(jì)算復(fù)雜性,通過(guò)將其與有限時(shí)間控制結(jié)合,實(shí)現(xiàn)了位置和速度的同步跟蹤目的;但上述同步控制的研究缺少了實(shí)物的支撐。
綜上所述,采用辨識(shí)算法獲得閥控缸液壓系統(tǒng)的模型參數(shù),并將辨識(shí)獲得的模型參數(shù)應(yīng)用在控制算法中,往往會(huì)獲得更好的控制效果。但鑒于以上文獻(xiàn)主要是采用仿真手段開(kāi)展的研究,所以需要引進(jìn)半實(shí)物仿真技術(shù)對(duì)控制算法進(jìn)行試驗(yàn)驗(yàn)證。
為此,筆者推導(dǎo)適合閥控缸液壓系統(tǒng)參數(shù)辨識(shí)的非線性狀態(tài)空間模型,引入RLS算法對(duì)模型參數(shù)進(jìn)行在線估計(jì),提出基于RLS的反步法動(dòng)態(tài)面控制策略,設(shè)計(jì)一種半實(shí)物仿真平臺(tái)(基于Linux實(shí)時(shí)操作系統(tǒng)、工控機(jī)和研華USB-4704數(shù)據(jù)采集卡),對(duì)基于RLS反步法動(dòng)態(tài)面控制策略的正確性和可行性進(jìn)行驗(yàn)證。
1 閥控缸液壓系統(tǒng)狀態(tài)空間模型
1.1 系統(tǒng)描述
筆者選定閥控非對(duì)稱缸系統(tǒng)為研究對(duì)象。其中,位移和壓力傳感器可反映出系統(tǒng)液壓缸位移、左右腔室的壓力,液壓缸活塞受力符合牛頓第二定律;考慮系統(tǒng)受到的負(fù)載由質(zhì)量、彈簧和黏性阻尼所組成[17],伺服閥為理想的零開(kāi)口四通滑閥,節(jié)流邊口是匹配和對(duì)稱的。
閥控缸系統(tǒng)位置控制原理如圖1所示。
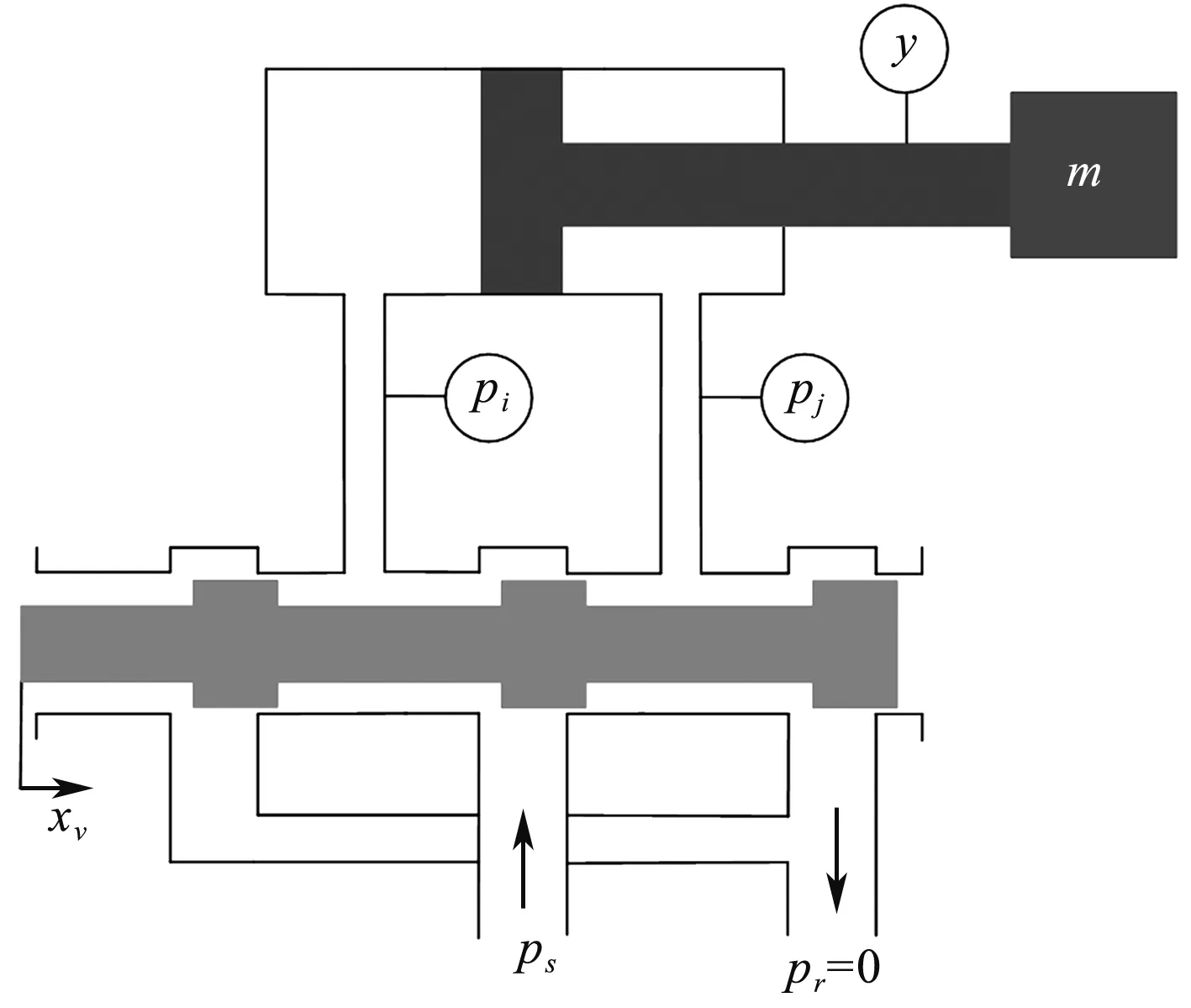
圖1 閥控非對(duì)稱缸系統(tǒng)位置控制圖
1.2 系統(tǒng)狀態(tài)空間模型

(1)
則閥控缸液壓系統(tǒng)狀態(tài)空間模型可表示為如下形式:
(2)
其中:
(3)
(4)
式中:Ai,Aj為活塞左右腔室的有效面積;m為活塞和負(fù)載質(zhì)量;b為黏性阻尼系數(shù);kc為彈簧剛度;Ff為負(fù)載力;βe為液壓油液體積彈性模量;Cd為流量系數(shù);CL為液壓缸內(nèi)泄漏系數(shù);V01,V02為液壓缸左右腔室初始體積;ωn為滑閥的固有頻率;ξn為滑閥的阻尼比;kv為滑閥閥芯的電流增益;u為滑閥輸入信號(hào)。
2 遞推最小二乘法
由式(2)可得,閥控缸液壓系統(tǒng)模型參數(shù)存在著時(shí)變性,這將導(dǎo)致許多控制策略在動(dòng)態(tài)控制時(shí)存在精度較低的問(wèn)題(例如非線性反步法控制)。因此,筆者將RLS算法應(yīng)用于系統(tǒng)模型參數(shù)辨識(shí)研究中,將RLS辨識(shí)獲得的參數(shù)應(yīng)用于反步法控制,以期獲得更好的系統(tǒng)控制效果。
RLS算法主要利用遞推公式對(duì)系統(tǒng)模型參數(shù)進(jìn)行在線修正[18]。筆者將式(2)轉(zhuǎn)化為最小二乘矩陣形式表示如下:
Y=Ψθ
(5)
其中:
(6)
(7)
θ=[θ21-θ22-θ23-θ24-θ25θ31-θ32-θ33-θ41θ42θ43]T
(8)
對(duì)式(5)進(jìn)行N次觀測(cè),并整理成為:
YN=ΨNθ
(9)
其中:
YN=[Y(1)Y(2) …Y(N)]T
(10)
ΨN=[Ψ(1)Ψ(2) …Ψ(N)]T
(11)
定義殘差向量εN,即:
εN=YN-ΨNθ
(12)
最小二乘估計(jì)就是使殘差量的平方和最小,求解參數(shù)估計(jì)值,即:
(13)
在式(13)基礎(chǔ)上,建立RLS遞推公式為:
(14)

3 基于RLS反步法控制器
3.1 閥控非對(duì)稱缸系統(tǒng)控制模型
根據(jù)文獻(xiàn)[19],筆者對(duì)式(2)定義新的狀態(tài)變量,表示如下:
(15)
式中:n為液壓缸左右腔有效面積比,n=θ22/θ21。
因此,基于參數(shù)辨識(shí)的閥控非對(duì)稱缸系統(tǒng)控制模型方程可簡(jiǎn)化表示如下:
(16)
其中:
(17)
(18)
3.2 基于RLS反步法動(dòng)態(tài)面控制器設(shè)計(jì)
由于反步法使用李雅普諾夫穩(wěn)定性理論作為控制器的設(shè)計(jì)準(zhǔn)則,因此,閥控非對(duì)稱缸系統(tǒng)反步法控制器具有較強(qiáng)的魯棒性[20]。其設(shè)計(jì)原理可歸結(jié)為:將具有參數(shù)嚴(yán)反饋形式的高階非線性系統(tǒng)簡(jiǎn)化為幾個(gè)子系統(tǒng),通過(guò)構(gòu)建子系統(tǒng)的李雅普諾夫函數(shù),實(shí)現(xiàn)整個(gè)系統(tǒng)的漸近穩(wěn)定性目的。但在控制律設(shè)計(jì)過(guò)程中,會(huì)進(jìn)行反復(fù)求導(dǎo),系統(tǒng)階次越高,微分越難求,此時(shí)就會(huì)產(chǎn)生“微分爆炸”現(xiàn)象。
為此,筆者將動(dòng)態(tài)面技術(shù)引入反步法控制器的設(shè)計(jì)中。
定義子系統(tǒng)x1的誤差量為:
e1=x1-x1,d
(19)
式中:x1,d為系統(tǒng)期望位移。
對(duì)式(19)求導(dǎo),即:
(20)
定義李雅普諾夫函數(shù)為:
(21)
虛擬控制量為:
(22)
筆者采用一階低通濾波器對(duì)式(22)進(jìn)行濾波處理,并將誤差表示如下:
(23)
式中:τ2為濾波器時(shí)間常數(shù);x2f為濾波器輸出;r2為濾波器誤差。
對(duì)式(21)求導(dǎo),即:
(24)
根據(jù)式(19)~式(24)的推導(dǎo)過(guò)程,以此類推,整個(gè)系統(tǒng)進(jìn)行李雅普諾夫函數(shù)求導(dǎo),可得:
(25)
式中:ki為大于零的正數(shù)。

最終,筆者設(shè)計(jì)得到的閥控非對(duì)稱缸系統(tǒng)反步法動(dòng)態(tài)面控制器表示如下:
(26)
4 半實(shí)物仿真試驗(yàn)
4.1 仿真平臺(tái)總體設(shè)計(jì)
半實(shí)物仿真是控制算法在調(diào)試驗(yàn)證時(shí),通過(guò)仿真接口將虛擬的被控對(duì)象和部分外部真實(shí)硬件設(shè)備連接在一起,進(jìn)行試驗(yàn)[21]。
為此,筆者采用在芯盛美工控機(jī)中建立的閥控缸液壓系統(tǒng)仿真模型替換真實(shí)被控對(duì)象,選取3張研華USB-4704數(shù)據(jù)采集卡作為數(shù)據(jù)傳輸接口和真實(shí)物理控制器;以Linux系統(tǒng)加PREEMPT_RT實(shí)時(shí)補(bǔ)丁為軟件環(huán)境,搭建了半實(shí)物仿真實(shí)時(shí)控制平臺(tái)。
具體的半實(shí)物仿真試驗(yàn)平臺(tái)如圖2所示。

圖2 半實(shí)物仿真試驗(yàn)平臺(tái)
半實(shí)物仿真平臺(tái)的具體工作過(guò)程為:在芯盛美工控機(jī)上調(diào)用四階龍格-庫(kù)塔算法,對(duì)狀態(tài)空間方程描述的閥控缸液壓系統(tǒng)微分方程組進(jìn)行數(shù)值求解,求解結(jié)果由編號(hào)為2和3的研華USB-4704數(shù)據(jù)采集卡的模擬量輸出端口輸出;在實(shí)時(shí)定時(shí)器的控制作用下,物理控制器讀取動(dòng)態(tài)求解部分的狀態(tài)變量,進(jìn)行非線性實(shí)時(shí)控制。編號(hào)為4的研華USB-4704數(shù)據(jù)采集卡的模擬輸入端口用于讀取物理控制器的反饋控制信號(hào),并應(yīng)用于閥控缸系統(tǒng)的輸入信號(hào),完成一次閥控缸液壓系統(tǒng)位置閉環(huán)控制過(guò)程,然后循環(huán)上述過(guò)程,直至試驗(yàn)結(jié)束。
上述物理控制器分別運(yùn)行了RLS辨識(shí)算法和反步法動(dòng)態(tài)面控制算法。
4.2 仿真實(shí)時(shí)性驗(yàn)證
如果在規(guī)定的試驗(yàn)時(shí)間內(nèi),半實(shí)物仿真不能準(zhǔn)確無(wú)誤地完成系統(tǒng)微分方程解算、數(shù)模信號(hào)采集和轉(zhuǎn)換任務(wù),則半實(shí)物仿真就不能還原被控系統(tǒng)真實(shí)的響應(yīng)狀態(tài)。
因此,半實(shí)物仿真應(yīng)具有高實(shí)時(shí)性的試驗(yàn)環(huán)境[22-23]。
筆者在Linux系統(tǒng)中加入PREEMPT_RT內(nèi)核補(bǔ)丁,采用LA1010邏輯分析儀測(cè)試搭建的半實(shí)物仿真平臺(tái)實(shí)時(shí)性。
試驗(yàn)測(cè)試環(huán)境為Windows和改造后的Linux操作系統(tǒng),其中Windows操作系統(tǒng)采用Query Performance Counter高精度定時(shí)器,改造后的Linux操作系統(tǒng)采用clock_nanosleep高精度定時(shí)器,設(shè)定2種定時(shí)器的定時(shí)周期為1 ms,則方波信號(hào)周期為2 ms,觀察各自的延時(shí)情況。
Windows系統(tǒng)定時(shí)器試驗(yàn)結(jié)果如圖3所示。
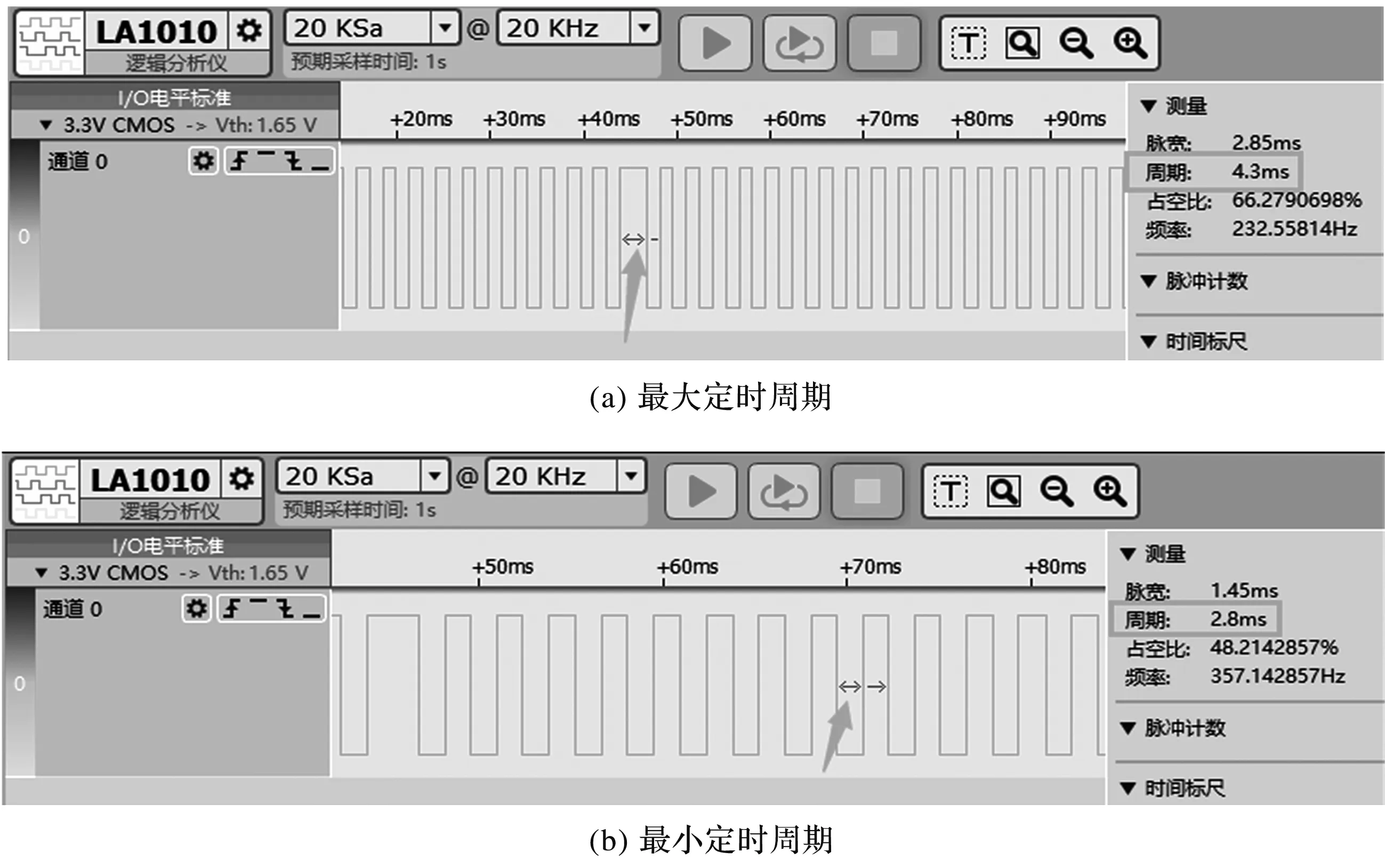
圖3 Windows系統(tǒng)下定時(shí)器測(cè)試圖
改造后Linux系統(tǒng)定時(shí)器試驗(yàn)結(jié)果如圖4所示。
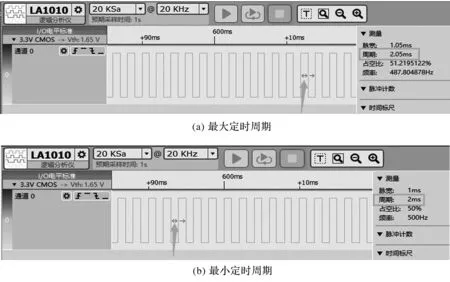
圖4 改造后Linux操作系統(tǒng)下定時(shí)器測(cè)試圖
圖3測(cè)試情況中,在Windows操作系統(tǒng)環(huán)境下,盡管絕大多數(shù)方波信號(hào)的定時(shí)周期都接近2 ms,但最大定時(shí)周期高達(dá)4.3 ms,最小定時(shí)周期為2.8 ms,即Windows發(fā)出的生成周期脈沖數(shù)據(jù)不夠穩(wěn)定可靠,不能用于半實(shí)物仿真試驗(yàn)。
圖4測(cè)試情況中,在改造后的Linux操作系統(tǒng)環(huán)境下,生成的方波信號(hào)是十分均勻?qū)ΨQ的,最大定時(shí)周期高達(dá)2.05 ms,延時(shí)率較Windows系統(tǒng)減少了112.5%,最小定時(shí)周期為2 ms,延時(shí)率較Windows系統(tǒng)減少了40%。
由此可以證明,打入PREEMPT_RT實(shí)時(shí)內(nèi)核補(bǔ)丁的Linux系統(tǒng)是一個(gè)實(shí)時(shí)性操作系統(tǒng),在該實(shí)時(shí)操作系統(tǒng)下得到的半實(shí)物仿真試驗(yàn)數(shù)據(jù)滿足實(shí)時(shí)性需求。
4.3 半實(shí)物試驗(yàn)與結(jié)果分析
4.3.1 參數(shù)辨識(shí)試驗(yàn)
在對(duì)閥控非對(duì)稱缸系統(tǒng)模型參數(shù)辨識(shí)試驗(yàn)中,輸入信號(hào)u=sin(2πt)V,仿真時(shí)間為t=4 s,采樣周期為1 ms。
閥控非對(duì)稱缸系統(tǒng)仿真參數(shù)如表1所示。
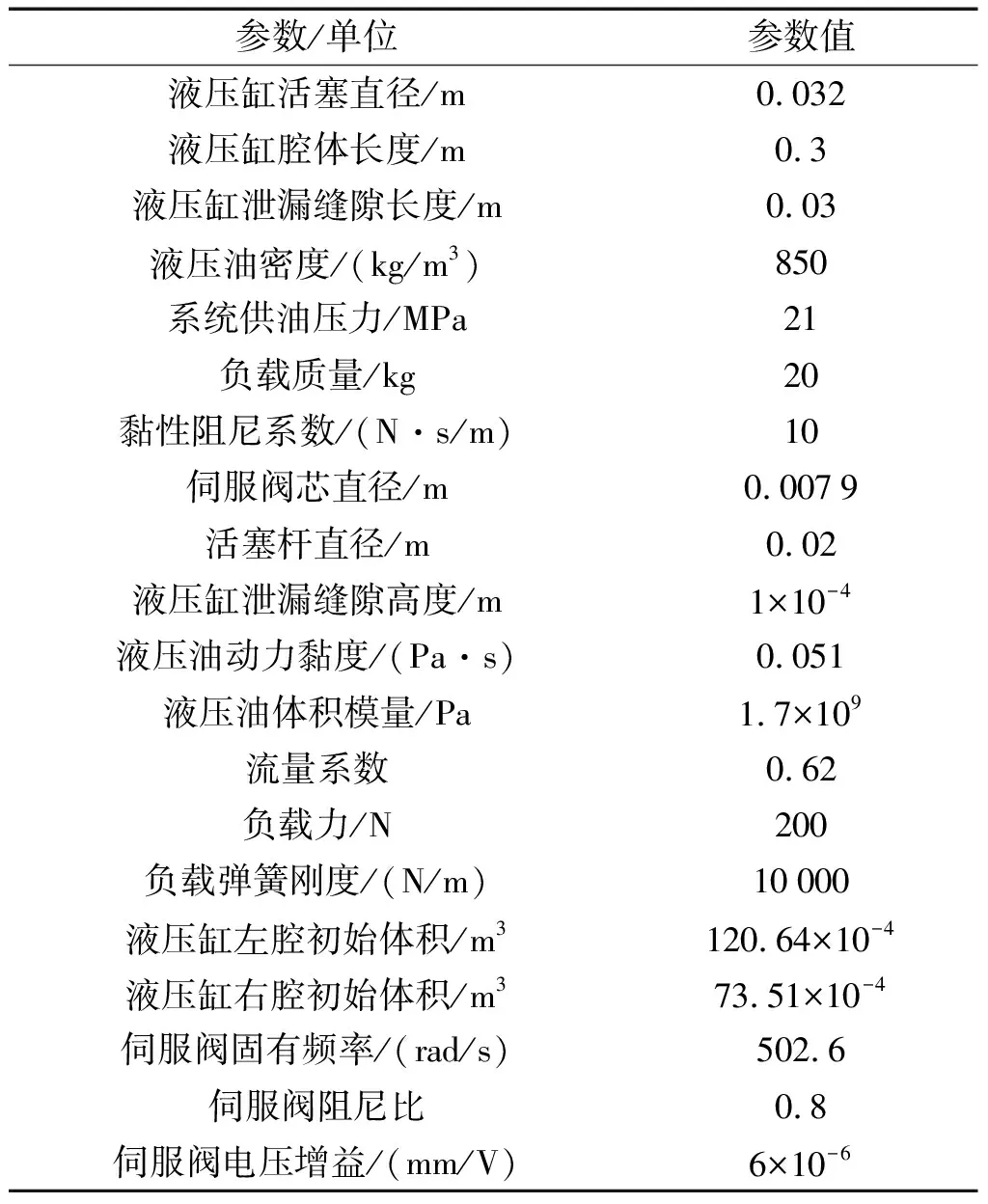
表1 閥控非對(duì)稱缸系統(tǒng)基本參數(shù)
閥控非對(duì)稱缸系統(tǒng)的主要狀態(tài)變量通過(guò)研華數(shù)據(jù)采集卡的模擬量輸出端口進(jìn)行輸出,輸出的模擬量數(shù)據(jù)如圖5所示。
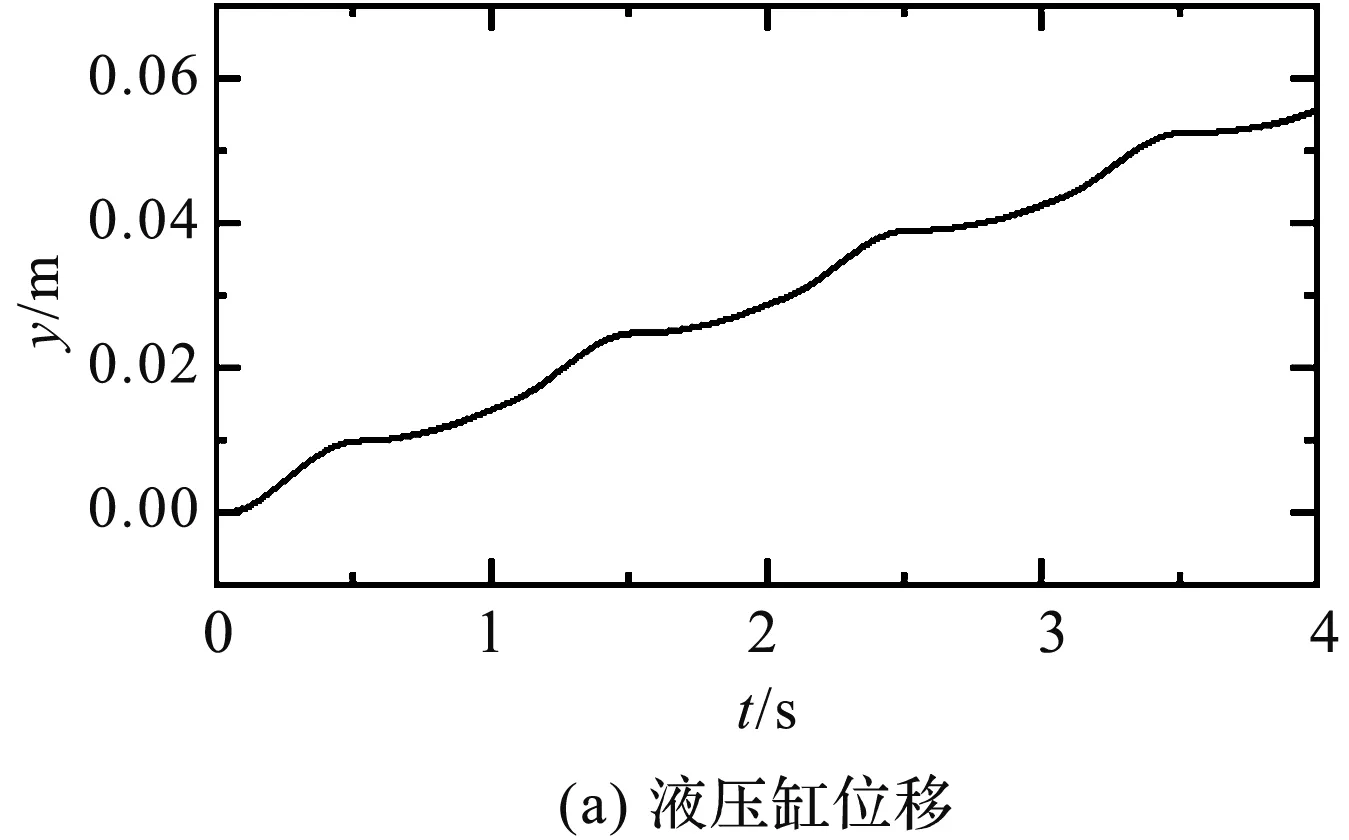
圖5 模擬量端口輸出數(shù)據(jù)
根據(jù)式(3)、式(7)和圖5輸出的數(shù)據(jù),筆者對(duì)式(2)中模型參數(shù)進(jìn)行了辨識(shí)試驗(yàn)。
筆者采用RLS算法獲得的待辨識(shí)參數(shù)迭代曲線,如圖6所示。
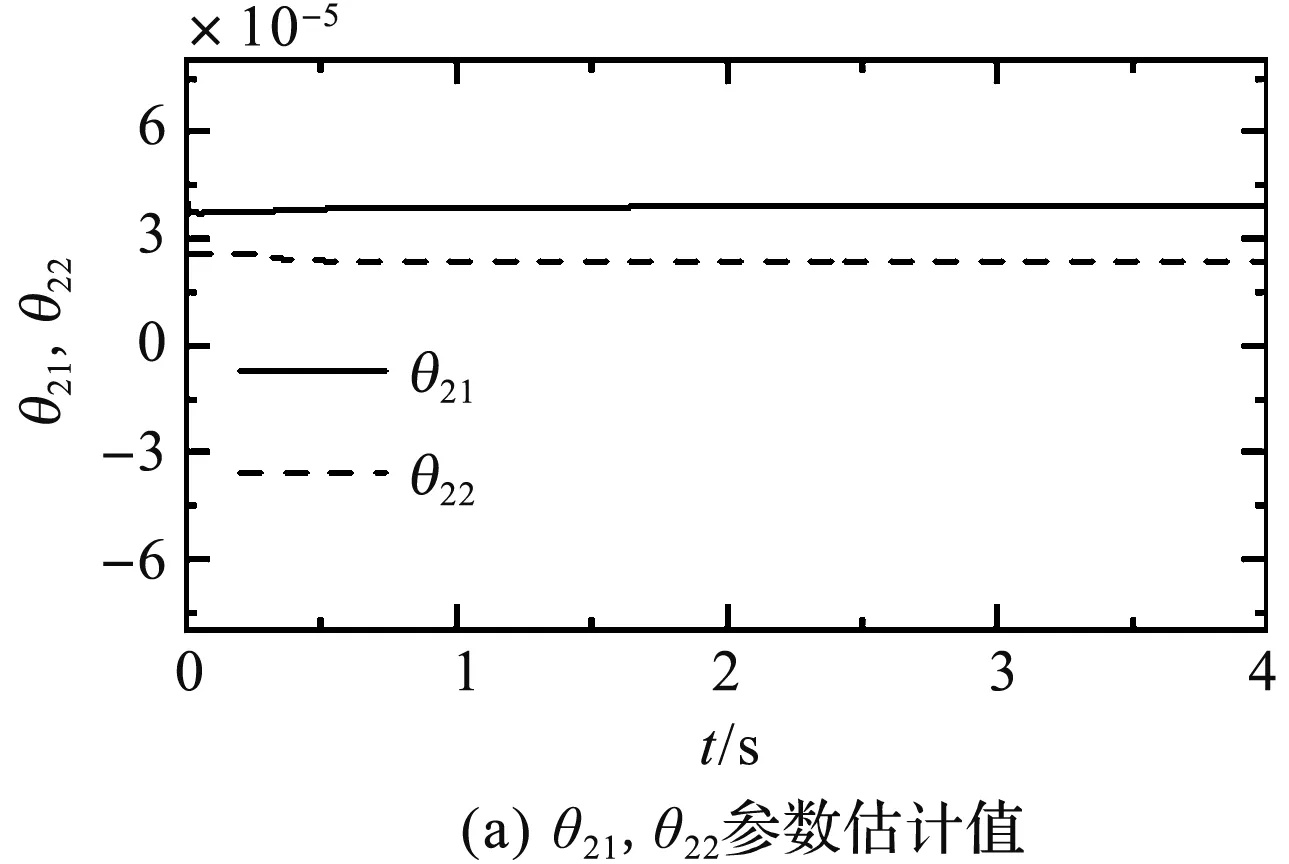
圖6 待辨識(shí)參數(shù)迭代曲線
從圖6參數(shù)迭代曲線可知:采用RLS算法辨識(shí)系統(tǒng)模型參數(shù)時(shí),參數(shù)迭代曲線迅速收斂至穩(wěn)定狀態(tài)。
筆者將待辨識(shí)參數(shù)收斂值與設(shè)定值進(jìn)行對(duì)比,結(jié)果如表2所示。
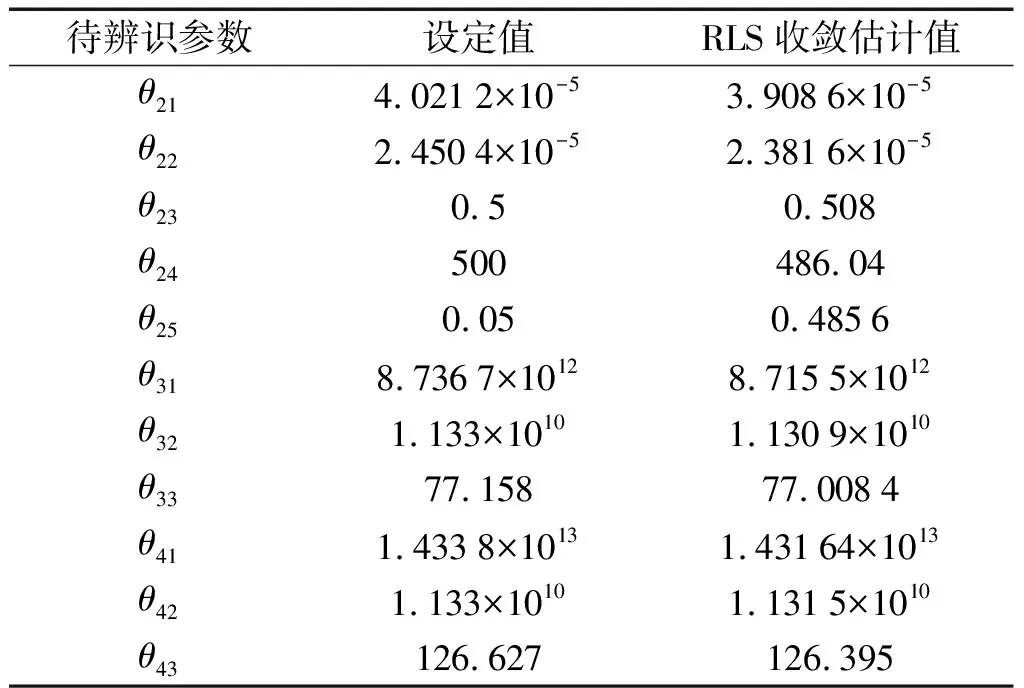
表2 閥控非對(duì)稱缸系統(tǒng)RLS辨識(shí)收斂值
從表2辨識(shí)的結(jié)果可知:RLS算法具有較高的辨識(shí)精度,因此,可以將辨識(shí)獲得的模型參數(shù)應(yīng)用于反步法動(dòng)態(tài)面控制試驗(yàn)中。
4.3.2 反步法動(dòng)態(tài)面控制試驗(yàn)
在對(duì)閥控非對(duì)稱缸系統(tǒng)RLS反步法動(dòng)態(tài)面控制試驗(yàn)中,期望位移信號(hào)為y=0.01sin(2πt)V,仿真時(shí)間為t=4 s,采樣周期為1 ms;將濾波器時(shí)間常數(shù)調(diào)試為τ2=τ3=τ4=τ5=0.001,反步法控制器的5個(gè)控制系數(shù)調(diào)試為k1=600,k2=400,k3=440,k4=100,k5=100。
同時(shí),為了驗(yàn)證基于RLS反步法動(dòng)態(tài)面控制策略的有效性,筆者將其與常規(guī)PID控制進(jìn)行了比較,PID控制器的3個(gè)控制系數(shù)分別整定為kp=4 000,ki=0,kd=10。
2種控制策略的期望位移、輸出位移如圖7所示。
從圖7(b)位移跟蹤曲線可知:RLS反步法控制的輸出位移更加貼近系統(tǒng)預(yù)設(shè)位移信號(hào),相較于PID控制,前者更能實(shí)現(xiàn)頻繁往復(fù)運(yùn)動(dòng)的響應(yīng)跟蹤目的。
2種控制策略的期望位移、輸出位移之間的位移誤差Δy曲線如圖8所示。
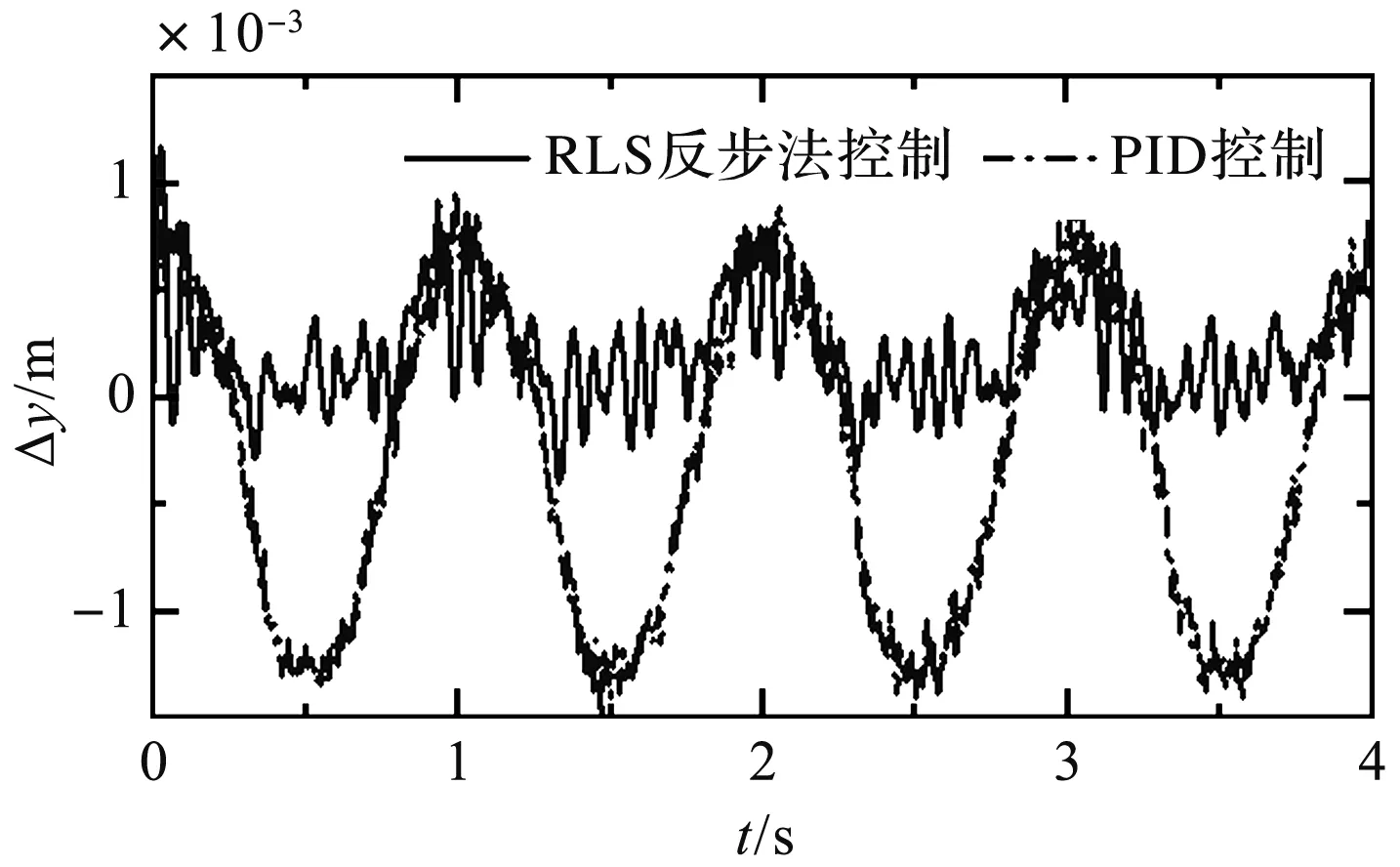
圖8 RLS反步法控制與PID控制位移誤差曲線圖
從圖8位移誤差曲線可知:采用PID控制非對(duì)稱缸時(shí)的最大位移誤差為1.4 mm,很難有效地跟蹤期望位移,系統(tǒng)響應(yīng)速度緩慢;而采用基于RLS反步法控制系統(tǒng)時(shí),雖然該控制算法在初始階段位移跟蹤誤差略大于PID控制方式,但隨著受控系統(tǒng)趨于穩(wěn)定狀態(tài),其控制效果相比于前者有較明顯的提高,最大位移誤差僅為0.38 mm,控制精度提高了72.9%。
由于非對(duì)稱缸左右兩腔的有效面積不對(duì)稱,使得液壓缸正、反運(yùn)動(dòng)換向時(shí),存在液壓力突變的現(xiàn)象,尤其是液壓缸反向運(yùn)動(dòng)切換為正向運(yùn)動(dòng)的過(guò)程,采用PID控制時(shí)非對(duì)稱缸的最大位移誤差為0.94 mm,而采用基于RLS反步法控制系統(tǒng)時(shí),最大位移誤差為0.75 mm,控制精度相比于前者提高了20.3%。
綜上所述,無(wú)論閥控非對(duì)稱缸系統(tǒng)處于穩(wěn)定狀態(tài)還是正、反運(yùn)動(dòng)換向的過(guò)程,基于RLS反步法控制都比PID控制具有更高的位移跟蹤精度,證明基于RLS反步法動(dòng)態(tài)面控制策略的正確性和可行性。
5 結(jié)束語(yǔ)
閥控缸液壓系統(tǒng)存在建模不準(zhǔn)確、動(dòng)態(tài)控制精度較低和控制算法調(diào)試?yán)щy的問(wèn)題,為此,筆者提出了一種基于遞推最小二乘法(RLS)的反步法動(dòng)態(tài)面控制策略,并采用半實(shí)物仿真平臺(tái)對(duì)其控制算法進(jìn)行了調(diào)試驗(yàn)證。
筆者首先推導(dǎo)了閥控缸液壓系統(tǒng)非線性狀態(tài)空間模型,采用RLS對(duì)模型參數(shù)進(jìn)行了估計(jì),在反步法理論基礎(chǔ)上,引入動(dòng)態(tài)面控制技術(shù),設(shè)計(jì)了基于RLS反步法動(dòng)態(tài)面控制器;搭建了系統(tǒng)半實(shí)物仿真平臺(tái),進(jìn)行了Linux系統(tǒng)實(shí)時(shí)性驗(yàn)證、閥控非對(duì)稱缸系統(tǒng)參數(shù)辨識(shí)、基于RLS反步法動(dòng)態(tài)面控制和PID控制試驗(yàn)。
研究結(jié)論如下:
1)在硬件設(shè)備邏輯分析儀下,試驗(yàn)測(cè)得Linux系統(tǒng)發(fā)出的最大、最小周期控制信號(hào)的延時(shí)率都優(yōu)于Windows系統(tǒng),證明改造后的Linux系統(tǒng)可以為半實(shí)物仿真平臺(tái)提供精確的定時(shí)控制需求;
2)半實(shí)物仿真的試驗(yàn)結(jié)果表明,RLS算法能用于實(shí)時(shí)獲得系統(tǒng)模型參數(shù),辨識(shí)的結(jié)果具有較高的準(zhǔn)確性;筆者所設(shè)計(jì)的基于RLS反步法動(dòng)態(tài)面控制器獲得了比PID控制更好的動(dòng)態(tài)運(yùn)動(dòng)軌跡,達(dá)到了預(yù)期的控制效果。
后續(xù)研究中,筆者將該控制算法移植到真實(shí)設(shè)備中,進(jìn)一步對(duì)真實(shí)的閥控缸液壓系統(tǒng)設(shè)備進(jìn)行控制,探討這一控制算法的實(shí)際應(yīng)用性。
猜你喜歡
童話王國(guó)·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
工業(yè)設(shè)計(jì)(2022年8期)2022-09-09 07:43:20
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測(cè)繪(2020年12期)2020-12-29 01:33:58
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2020年10期)2020-11-26 08:24:50
數(shù)學(xué)物理學(xué)報(bào)(2020年2期)2020-06-02 11:29:24
裝備制造技術(shù)(2019年12期)2019-12-25 03:06:46
中國(guó)洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
光學(xué)精密工程(2016年6期)2016-11-07 09:07:19