鴨舵式雙旋彈非線性角運(yùn)動及其分岔特性
2023-11-27 02:53:32趙新新史金光王中原張寧
兵工學(xué)報 2023年10期
趙新新, 史金光, 王中原, 張寧
(南京理工大學(xué) 能源與動力工程學(xué)院, 江蘇 南京 210094)
0 引言
現(xiàn)代戰(zhàn)爭對彈藥精確打擊能力的需求日益提高,設(shè)法消除或控制隨機(jī)誤差影響、改善炮彈地面密集度,已經(jīng)成為兵器彈箭技術(shù)發(fā)展的重要方向[1]。在此背景下,為克服彈丸轉(zhuǎn)速過快對姿態(tài)測量和機(jī)構(gòu)動作等的不利影響,以實(shí)現(xiàn)對常規(guī)旋轉(zhuǎn)炮彈的精確化改造,一類采用滾動軸承連接、具有前/后體雙自旋結(jié)構(gòu)的彈道修正彈應(yīng)運(yùn)而生,并憑借對原彈結(jié)構(gòu)改動較小、控制簡易和低成本等優(yōu)勢,得到相關(guān)學(xué)者和研究機(jī)構(gòu)的廣泛關(guān)注[2]。
在當(dāng)前國內(nèi)外已經(jīng)開展的各類將常規(guī)旋轉(zhuǎn)炮彈改造為雙旋彈的研究中,根據(jù)修正機(jī)構(gòu)特點(diǎn)以及在彈上安裝位置的不同,可將其主要技術(shù)途徑歸納為兩種[3]:一種是在彈丸頭部加裝具有鴨舵機(jī)構(gòu)的修正組件,采用“前體低旋+后體高旋”的策略,通過控制前體滾轉(zhuǎn)角控制方位實(shí)現(xiàn)彈道修正;另一種則是在彈丸尾部加裝微型擾流片,采用“前體高旋+后體低旋”的策略,由擾流片張開提供彈道修正所需的控制力和力矩。由于第1種可以依靠舵片產(chǎn)生反轉(zhuǎn)力矩,使前體在彈道初始段快速實(shí)現(xiàn)自主減旋,從原理上降低了對驅(qū)動電機(jī)的性能要求,因此表現(xiàn)出較好的發(fā)展?jié)摿蛻?yīng)用前景,并已有學(xué)者和研究機(jī)構(gòu)圍繞其氣動特性分析[4-11]、彈道模型建立[12-14]、修正策略與控制方法研究[15-20]等開展了大量工作,所得結(jié)果為該類炮彈的研制提供了理論基礎(chǔ)。
近年來隨著研究的深入,針對鴨舵式雙旋彈在飛行過程中遇到的穩(wěn)定性問題,相關(guān)工作開始重點(diǎn)圍繞其角運(yùn)動理論和穩(wěn)定性條件等展開。其中Wernert等[21]針對一種舵偏角可調(diào)節(jié)的鴨舵式雙旋彈,分析了其在線性假設(shè)下的穩(wěn)定性問題;Zhu等[22]將攻角引起的舵片升力合并到后體上,研究了該類炮彈的飛行穩(wěn)定性條件;文獻(xiàn)[23-24]中對重力、控制力作用下的動態(tài)響應(yīng)規(guī)律進(jìn)行討論,分析了舵片周期性干擾引起的強(qiáng)迫角運(yùn)動;馬國梁等[25]采用Lyapunov方法,推導(dǎo)了前體滾轉(zhuǎn)角任意時變條件下的絕對穩(wěn)定性判據(jù);朱煌等[26]和趙新新等[27-28]通過建立并求解復(fù)攻角運(yùn)動方程,對該類炮彈角運(yùn)動的形成機(jī)理和彈道修正的力學(xué)本質(zhì)進(jìn)行闡釋,提出其全彈道飛行的動態(tài)穩(wěn)定性條件和前體結(jié)構(gòu)設(shè)計的舵片參數(shù)約束條件。
上述研究主要圍繞鴨舵式雙旋彈的線性角運(yùn)動理論展開,對其非線性問題分析較少,部分已開展的工作實(shí)質(zhì)上也是在小攻角假設(shè)下進(jìn)行[29]。但是考慮舵控起始擾動和強(qiáng)迫作用等的影響[24, 27-28],該類炮彈復(fù)攻角的幅值一般較大,尤其是在起控后前體滾轉(zhuǎn)角控制方位多次切換時,甚至可能超出某一界限,使原基于小攻角假設(shè)得到的穩(wěn)定性判據(jù)等結(jié)果不再準(zhǔn)確,因此本文擬對其非線性角運(yùn)動及其分岔特性展開研究。在非滾轉(zhuǎn)系中建立改進(jìn)的6自由度彈道方程,并在考慮幾何非線性和氣動非線性條件下,導(dǎo)出其精確的廣義復(fù)攻角運(yùn)動方程及其狀態(tài)空間模型。據(jù)此推導(dǎo)該類炮彈大攻角飛行時的動態(tài)穩(wěn)定性判據(jù),并通過外彈道數(shù)值仿真計算,討論不同因素對廣義復(fù)攻角運(yùn)動及其分岔特性的影響,以期為工程研制提供理論參考。
1 動力學(xué)建模
1.1 物理模型
鴨舵式雙旋彈主要由裝有修正組件的前體和高旋后體兩部分構(gòu)成,其中前體結(jié)構(gòu)如圖1所示:差動布置的舵片1、3為減旋舵,用于產(chǎn)生反轉(zhuǎn)力矩,使前體轉(zhuǎn)速在彈道初始段快速下降,斜置角為δf;同向布置的舵片2、4為操縱舵,用于提供彈道修正所需的控制力和力矩,舵偏角為δd。
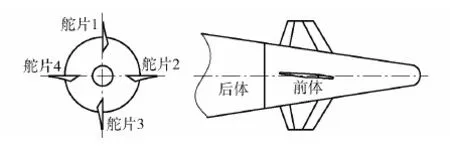
圖1 前體結(jié)構(gòu)示意圖Fig.1 The configuration of the forebody
該類炮彈在出炮口后開始無控飛行,后體高速旋轉(zhuǎn),以維持彈丸飛行穩(wěn)定,轉(zhuǎn)速約為300 r/s;前體快速減旋,為有控飛行時的姿態(tài)測量和機(jī)構(gòu)動作提供條件,轉(zhuǎn)速在反轉(zhuǎn)力矩和前/后體滾轉(zhuǎn)阻尼力矩綜合作用下達(dá)到某一平衡轉(zhuǎn)速,一般為5~20 r/s。飛行一段時間后進(jìn)入有控飛行階段,前體滾轉(zhuǎn)角在驅(qū)動電機(jī)作用下迅速切換到某一固定方位,并且會依據(jù)后續(xù)彈道諸元與預(yù)定彈道諸元的偏差進(jìn)行有限次調(diào)整,前體轉(zhuǎn)速在一段時間內(nèi)近似為0 r/s。
1.2 坐標(biāo)系定義及轉(zhuǎn)換
1)基準(zhǔn)坐標(biāo)系:用作各坐標(biāo)系的基準(zhǔn),記為E。該坐標(biāo)系的原點(diǎn)為彈丸質(zhì)心,Ox軸在水平面內(nèi)指向射擊方向,Oy軸豎直向上,Oz軸按右手定則確定。
2)非滾轉(zhuǎn)坐標(biāo)系:由基準(zhǔn)坐標(biāo)系旋轉(zhuǎn)得到,記為N。該坐標(biāo)系OxN軸沿彈軸方向,OyN軸垂直彈軸向上,OzN軸按右手定則確定。其相對基準(zhǔn)坐標(biāo)系的轉(zhuǎn)動角速度記為ωN,且ωN軸向分量為0 r/s。
3)前體坐標(biāo)系:用于確定前體滾轉(zhuǎn)角方位,記為F。該坐標(biāo)系與非滾轉(zhuǎn)坐標(biāo)系相差前體滾轉(zhuǎn)角γF,二者的轉(zhuǎn)換矩陣為
(1)
1.3 改進(jìn)的6自由度彈道方程
為便于研究,依據(jù)鴨舵式雙旋彈前體滾轉(zhuǎn)角速度可以進(jìn)行設(shè)計的特點(diǎn),結(jié)合后體轉(zhuǎn)速導(dǎo)出約化滾轉(zhuǎn)角速度,建立其改進(jìn)的6自由度彈道方程如下:
1)依據(jù)質(zhì)心運(yùn)動定理,在非滾轉(zhuǎn)坐標(biāo)系下建立其質(zhì)心運(yùn)動方程,分量形式為
(2)
式中:vNx、vNy、vNz為速度矢量v在非滾轉(zhuǎn)坐標(biāo)系中的分量;ωNy、ωNz為ωN在非滾轉(zhuǎn)坐標(biāo)系中的橫向分量;m為彈丸質(zhì)量;FNx,p、FNy,p、FNz,p分別為彈體空氣動力在非滾轉(zhuǎn)坐標(biāo)系中的分量;FNx,c、FNy,c、FNz,c分別為舵片控制力在非滾轉(zhuǎn)坐標(biāo)系中的分量;gNx、gNy、gNz分別為重力加速度矢量g在非滾轉(zhuǎn)坐標(biāo)系中的分量。
2)依據(jù)動量矩定理,在非滾轉(zhuǎn)坐標(biāo)系下建立其繞質(zhì)心運(yùn)動方程,分量形式為
(3)
式中:C、A分別為彈丸極轉(zhuǎn)動慣量和赤道轉(zhuǎn)動慣量;p為約化滾轉(zhuǎn)角速度,p=(pFCF+pACA)/C,pF、pA分別為前體和后體的滾轉(zhuǎn)角速度,CF、CA分別為前體和后體的極轉(zhuǎn)動慣量;MNx,p、MNy,p、MNz,p為彈體空氣動力矩在非滾轉(zhuǎn)系坐標(biāo)中的分量;MNx,c、MNy,c、MNz,c為舵片控制力矩在非滾轉(zhuǎn)坐標(biāo)系中的分量。
1.4 非線性角運(yùn)動模型
為簡化問題,在考慮幾何非線性條件下,引入廣義復(fù)攻角對彈軸相對速度矢量的空間方位進(jìn)行準(zhǔn)確描述,表達(dá)式為
(4)
其對時間的1階導(dǎo)數(shù)為
(5)

(6)
1.5 空氣動力和力矩模型
考慮前/后體的干擾作用,鴨舵式雙旋彈的氣動非線性程度較高,尤其是在大攻角情況下不宜略去,故本文建立其非線性空氣動力和力矩模型。
1.5.1 彈體空氣動力和力矩
將前體軸對稱部分與后體合并記作彈體,其空氣動力和力矩模型與常規(guī)旋轉(zhuǎn)彈的相似。略去較小的馬格努斯力,彈體空氣動力主要由升力和阻力構(gòu)成,在非滾轉(zhuǎn)坐標(biāo)系中的表達(dá)式為
(7)
式中:η為非線性因子,η=vNx/v,體現(xiàn)大攻角飛行時幾何非線性的影響;ρ為空氣密度;S為特征面積;cx為阻力系數(shù),cx=cx0+cx2δ2,cx0、cx2分別為其線性項(xiàng)和非線性項(xiàng),δ為廣義復(fù)攻角幅值;c′y為升力系數(shù)對δ的導(dǎo)數(shù),c′y=cy0+cy2δ2,cy0、cy2分別為其線性項(xiàng)和非線性項(xiàng)。
彈體空氣動力沿v方向的分量為
(8)
不考慮氣動偏心和動不平衡影響,彈體空氣動力矩主要包括靜力矩、赤道阻尼力矩、極阻尼力矩和馬格努斯力矩,在非滾轉(zhuǎn)坐標(biāo)系中的表達(dá)式為
(9)
式中:l為特征長度;d為彈徑;m′xz為極阻尼力矩系數(shù)對(pd/v)的導(dǎo)數(shù),m′xz=mxz0+mxz2δ2,mxz0、mxz2分別為其線性項(xiàng)和非線性項(xiàng);m′z為靜力矩系數(shù)對δ的導(dǎo)數(shù),m′z=mz0+mz2δ2,mz0、mz2分別為其線性項(xiàng)和非線性項(xiàng);m′zz為赤道阻尼力矩系數(shù)對(ωNd/v)的導(dǎo)數(shù),m′zz=mzz0+mzz2δ2,mzz0、mzz2分別為其線性項(xiàng)和非線性項(xiàng);m″y為馬格努斯力矩系數(shù)對(pd/v)和δ的聯(lián)合導(dǎo)數(shù),m″y=my0+my2δ2,my0、my2分別為其線性項(xiàng)和非線性項(xiàng)。
1.5.2 舵片控制力和力矩
在外彈道飛行中,舵片產(chǎn)生的軸向力較小,可以略去;法向力不僅與舵偏角有關(guān),還受到彈體攻角的影響,在前體坐標(biāo)系中的擬合公式可以寫為
(10)
式中:c′f為減旋舵法向力系數(shù)對其有效攻角的導(dǎo)數(shù),c′f=cf0+cf2δ2,cf0、cf2分別為其線性項(xiàng)和非線性項(xiàng);α1,3為舵片1、3的有效攻角,α1,3=±δf-δ1sinγF+δ2cosγF,δf為斜置角;c′d為操縱舵法向力系數(shù)對其有效攻角的導(dǎo)數(shù),c′d=cd0+cd2δ2,cd0、cd2分別為其線性項(xiàng)和非線性項(xiàng);α2,4為舵片2、4的有效攻角,α2,4=δd+δ1cosγF+δ2sinγF,δd為舵偏角。
由于減旋舵和操縱舵作用上的差異,對前體進(jìn)行設(shè)計時二者的氣動參數(shù)可能不同,則假設(shè)
(11)

由式(10)整理可得舵片控制力在非滾轉(zhuǎn)坐標(biāo)系中的表達(dá)式為
(12)
式中:ν為廣義復(fù)攻角的相位。
舵片控制力沿v方向的分量為
(13)
綜合考慮式(12)對應(yīng)的靜力矩和由一對減旋舵產(chǎn)生的反轉(zhuǎn)力矩,可得舵片控制力矩在非滾轉(zhuǎn)系中的表達(dá)式為
(14)
式中:L為舵片壓心沿彈軸方向到彈丸質(zhì)心的距離;Mx,w為反轉(zhuǎn)力矩,Mx,w=ρv2Slm′x,wδF/2,m′x,w為反轉(zhuǎn)力矩系數(shù)對δf的導(dǎo)數(shù),m′x,w=mx,w,0+mx,w,2δ2,mx,w,0、mx,w,2分別為其線性項(xiàng)和非線性項(xiàng)。
2 非線性角運(yùn)動及其分岔特性分析
2.1 非線性廣義復(fù)攻角運(yùn)動方程
將作用在彈丸上的空氣動力和力矩代入式(6),可得
(15)
式中:P=Cp/(Av)。

(16)
由于δf和δd取值較小(一般為4°~8°),且旋轉(zhuǎn)穩(wěn)定彈的復(fù)攻角運(yùn)動是以復(fù)平衡攻角為中心做二圓運(yùn)動,故將等號右邊量級較小的第2、3和4項(xiàng)略去,再對其做周期平均處理,可得
(17)
式中:R為大攻角飛行時幾何非線性的影響,R=(η2-1)(bf+bc/2)。
將式(15)前兩式寫為矩陣形式,可得
(18)
將式(15)后兩式寫為矩陣形式,可得
(19)
聯(lián)立式(18)~式(19),并將方程轉(zhuǎn)化為對弧長s的導(dǎo)數(shù),推導(dǎo)可得包含幾何非線性和氣動非線性的精確廣義復(fù)攻角運(yùn)動方程為
(20)
式中:δ′1、δ′2分別為δ1、δ2對s的1階導(dǎo)數(shù);δ″1、δ″2分別為δ1、δ2對s的2階導(dǎo)數(shù);a11、a12、a21、a22、b11、b12、b21、b22為系數(shù)矩陣中各元素;c1、c2為非齊次項(xiàng)系數(shù)。
由于bx等空氣動力和力矩組合參數(shù)、g/v2和η′/η(η′為η對弧長的1階導(dǎo)數(shù))均量級較小,可以略去彼此間乘積的高階小項(xiàng),整理得到式(20)中各參數(shù)的表達(dá)式為
(21)
2.2 分岔特性分析
分岔概念源于對力學(xué)失穩(wěn)問題的研究,是指系統(tǒng)相軌跡拓?fù)浣Y(jié)構(gòu)隨任意小的參數(shù)變化而發(fā)生突變的現(xiàn)象,依據(jù)具體問題的不同,主要可以分為靜態(tài)分岔、動態(tài)分岔以及局部分岔和全局分岔等[30]。對于本文研究的鴨舵式雙旋彈,為保證其具有良好的飛行特性,首先必須在小攻角條件下動態(tài)穩(wěn)定。在此基礎(chǔ)上,對其廣義復(fù)攻角運(yùn)動的分岔特性進(jìn)行研究,有關(guān)問題即可轉(zhuǎn)換為次臨界狀態(tài)下的閉軌線分岔,通過對穩(wěn)定平衡點(diǎn)附近不穩(wěn)定極限環(huán)的形成條件及其有關(guān)性質(zhì)進(jìn)行分析,探討不同因素(包括非線性氣動系數(shù)(導(dǎo)數(shù))、彈道位置以及舵片控制力和力矩)對極限環(huán)半徑的影響。
首先根據(jù)式(20)給出的鴨舵式雙旋彈廣義復(fù)攻角運(yùn)動方程,導(dǎo)出其狀態(tài)空間模型為
(22)
式(21)為狀態(tài)矩陣中各元素的精確表達(dá)式。為簡化問題,依據(jù)分岔點(diǎn)復(fù)攻角的幅值近似不變,略去a11和a22中的η′/η項(xiàng)。進(jìn)一步考慮起控前/后前體滾轉(zhuǎn)角運(yùn)動特性的不同[28],可以分別導(dǎo)出該類炮彈在無控飛行和有控飛行時狀態(tài)矩陣中各元素的表達(dá)式如下:
1)無控飛行時前體自由滾轉(zhuǎn),前體滾轉(zhuǎn)角速度pF相對復(fù)攻角慢圓運(yùn)動的頻率較大,因此可以在一個運(yùn)動周期內(nèi)將狀態(tài)矩陣中各元素平均處理,可得
(23)
2)有控飛行時前體滾轉(zhuǎn)角控制方位固定不變,pF在一段時間內(nèi)近似為0 r/s,故略去其與氣動組合參數(shù)乘積的高階小項(xiàng),整理得到狀態(tài)矩陣中各元素為
(24)
將式(23)和式(24)分別代入式(22),可得狀態(tài)矩陣為緩變系統(tǒng)。采用系數(shù)凍結(jié)法對其進(jìn)行研究,并任選參數(shù)σ為分岔參數(shù),則其特征方程為
f(λ,σ)=h0λ4+h1λ3+h2λ2+h3λ+h4
(25)
式中:λ為特征根;各項(xiàng)系數(shù)的表達(dá)式為
(26)
據(jù)此依據(jù)文獻(xiàn)[28],采用霍爾維茨方法可以導(dǎo)出滿足系統(tǒng)在無控飛行和有控飛行時均動態(tài)穩(wěn)定的充要條件為
(27)
因此若存在η0∈(0,1),能使式(27)在任意η>η0處成立、在η<η0處不成立,則系統(tǒng)穩(wěn)定的平衡點(diǎn)附近會形成不穩(wěn)定的極限環(huán),且極限環(huán)半徑為
(28)
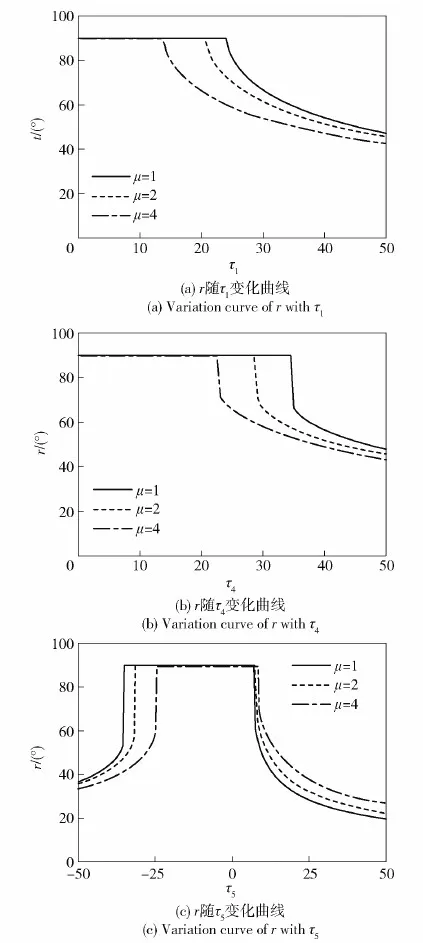
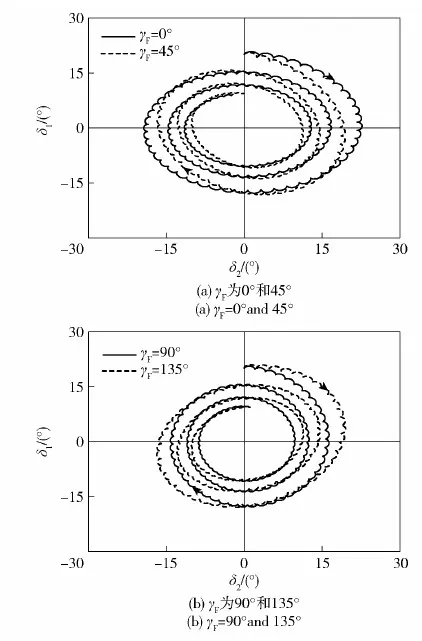
則η=η0即為參數(shù)σ對應(yīng)的分岔點(diǎn),其由式(27)在η的取值范圍內(nèi)遍歷求解,并判斷上述條件成立時得到,故只有當(dāng)δ 考慮到鴨舵式雙旋彈的精確廣義復(fù)攻角運(yùn)動方程及其對應(yīng)的狀態(tài)空間模型較為復(fù)雜,直接對其解析求解存在困難,因此本節(jié)以某155 mm鴨舵式雙旋彈為例,在炮兵標(biāo)準(zhǔn)氣象條件下,采用數(shù)值方法對其分岔特性進(jìn)行分析。彈丸物理參數(shù)見表1,將仿真初始條件設(shè)為初速930 m/s、后體轉(zhuǎn)速300 r/s、初始擾動略去,可得主要空氣動力和力矩組合參數(shù)(線性項(xiàng))的全彈道變化曲線如圖2所示。 圖2 空氣動力和力矩組合參數(shù)Fig.2 Combination parameters of aerodynamics and moments (29) 3.2.1 非線性氣動系數(shù)(導(dǎo)數(shù))的影響 為便于分析非線性氣動系數(shù)(導(dǎo)數(shù))對系統(tǒng)分岔特性的影響,首先依據(jù)1.5節(jié)建立的空氣動力和力矩模型,在大攻角條件下,將bx等空氣動力和力矩組合參數(shù)改寫為 bx=bx0(1+τ1δ2),by=by0(1+τ2δ2),kz=kz0(1+τ3δ2),kzz=kzz0(1+τ4δ2),ky=ky0(1+τ5δ2) (30) 式中:τi(i=1,2,…,5)為各空氣動力和力矩系數(shù)(導(dǎo)數(shù))的非線性項(xiàng)與線性項(xiàng)之比。 據(jù)此在無控飛行條件下,選取彈道頂點(diǎn)處參數(shù)為數(shù)值仿真條件,給出極限環(huán)半徑隨τi變化的曲線如圖3所示。由圖3可見:1)當(dāng)τ1、τ3、τ4、τ5大于某界限,或τ2、τ5小于某界限時,穩(wěn)定的平衡點(diǎn)附近均會形成不穩(wěn)定的極限環(huán),且r隨τ1、τ3、τ4、τ5增大或τ2、τ5減小而減小;2)升力和馬格努斯力矩的非線性項(xiàng)對系統(tǒng)分岔特性起主要影響,當(dāng)τ2、τ5趨近某一界限值時,會導(dǎo)致r快速減小到較低水平。 將式(30)代入式(29),則f對τi分別求導(dǎo),可得 (31) 圖4分別為τ2=-25和τ5=25時不同初值下的復(fù)攻角運(yùn)動曲線。由圖4可見:當(dāng)初值位于極限環(huán)內(nèi)時,系統(tǒng)逐漸收斂;當(dāng)初值位于極限環(huán)外時,系統(tǒng)逐漸發(fā)散,驗(yàn)證了前述分析和式(28)的極限環(huán)半徑判別方法合理有效。 圖4 不同初值下的復(fù)攻角運(yùn)動曲線Fig.4 Complex attack angle motions under different initial values 3.2.2 彈道位置的影響 進(jìn)一步分析彈道位置的影響,首先在不考慮氣動非線性的條件下,給出極限環(huán)半徑全彈道變化曲線如圖5所示。易見系統(tǒng)在彈道初始段會形成不穩(wěn)定的極限環(huán),而在其余彈道點(diǎn)處不會形成。據(jù)此結(jié)合3.2.1節(jié)初步表明:τi的界限值會隨彈道位置發(fā)生變化,并在某些彈道點(diǎn)上趨近于0,故不同彈道點(diǎn)上r對非線性氣動系數(shù)(導(dǎo)數(shù))的響應(yīng)特性存在差異,導(dǎo)致較小的氣動非線性也可能使r快速減小。 圖5 r隨t變化曲線(τi=0)Fig.5 Variation curve of r with t (τi=0) 圖6為不同彈道點(diǎn)處r隨τi變化的曲線。事實(shí)上彈道位置改變實(shí)質(zhì)是飛行速度和空氣密度的變化對系統(tǒng)分岔特性產(chǎn)生影響,且前者在彈道末段趨于平緩,后者在t=10 s和t=70 s處近似相等。由圖6可見:1)空氣密度變化會對系統(tǒng)分岔特性產(chǎn)生影響,其值增大總體上會使r逐漸減小,即高度越低彈丸穩(wěn)定性相對越差;2)飛行速度對系統(tǒng)分岔特性起重要影響,其值改變可能使r增大,也可能導(dǎo)致其快速減小,故工程研制中應(yīng)對彈丸初速和起控時刻進(jìn)行設(shè)計,以盡量避免在某些速度條件下對彈丸進(jìn)行控制。 圖7以τ5=-25為例分別給出了以t為10 s和70 s處參數(shù)作為數(shù)值仿真條件的復(fù)攻角運(yùn)動曲線。結(jié)合圖6(e)可知,當(dāng)飛行高度近似相同時,速度變化導(dǎo)致極限環(huán)半徑發(fā)生改變,并使相同初值在t=10 s時位于極限環(huán)外,而在t=70 s時位于極限環(huán)內(nèi),故系統(tǒng)在兩彈道點(diǎn)處分別逐漸發(fā)散和逐漸收斂,驗(yàn)證了前述結(jié)論合理。 3.2.3 舵片控制力和力矩的影響 此外,考慮有控飛行對系統(tǒng)分岔特性的影響。依據(jù)式(31)可知,f隨τ1、τ2、τ4、τ5先增大、后減小,隨τ3持續(xù)減小,故當(dāng)起控后滿足X>0時,舵片控制力和力矩會使圖3中r隨τi變化的曲線向內(nèi)收縮,從而導(dǎo)致極限環(huán)半徑相較無控飛行時的減小;又由于X中不含γF項(xiàng),故前體滾轉(zhuǎn)角控制方位改變對系統(tǒng)分岔特性影響不大,即彈丸在不同控制方位下的穩(wěn)定性近似相同。 圖6 不同彈道點(diǎn)處r隨τi變化曲線Fig.6 Variation curves of r with τi at different ballistic points 圖7 不同彈道點(diǎn)的復(fù)攻角運(yùn)動曲線Fig.7 Complex attack angle motion at different ballistic points 圖8 不同μ時r隨τi(i=1,4,5)變化曲線Fig.8 Variation curve of r with τi(i=1,4,5) under different μ values 在τ5=-25情況下,選取t=70 s處參數(shù)作為數(shù)值仿真條件,給出了有控飛行時的復(fù)攻角運(yùn)動曲線,如圖9所示。易見,當(dāng)γF分別取0°、45°、90°和135°時,復(fù)攻角曲線的運(yùn)動頻率和收斂性質(zhì)基本吻合,表明前體滾轉(zhuǎn)角控制方位對系統(tǒng)分岔特性影響不大,驗(yàn)證了本節(jié)結(jié)論和考慮有控飛行時的動態(tài)穩(wěn)定性條件合理可行。 圖9 不同控制方位下的復(fù)攻角曲線Fig.9 Complex attack angle motions under different control directions 本文通過建立鴨舵式雙旋彈精確的廣義復(fù)攻角運(yùn)動方程及其對應(yīng)的狀態(tài)空間模型,研究了該類炮彈大攻角飛行時的非線性角運(yùn)動問題,并采用數(shù)值方法分析不同因素對系統(tǒng)分岔特性和極限環(huán)半徑的影響。所得主要結(jié)論如下: 1)綜合考慮幾何非線性和氣動非線性影響,建立了鴨舵式雙旋彈非線性的動態(tài)穩(wěn)定性條件,能夠用于判別該類炮彈在大攻角飛行時的動態(tài)穩(wěn)定性。 2)升力和馬格努斯力矩的非線性項(xiàng)是影響系統(tǒng)分岔特性的主要因素,當(dāng)τ2、τ5大于某一界限且繼續(xù)增大,或τ2、τ5小于某一界限且繼續(xù)減小時,均會導(dǎo)致極限環(huán)半徑快速減小。 3)彈道位置變化通過使飛行速度和空氣密度改變,對系統(tǒng)分岔特性產(chǎn)生影響,且速度變化可能導(dǎo)致極限環(huán)半徑快速減小,故工程研制中應(yīng)對彈丸初速和起控時刻進(jìn)行設(shè)計,以盡量避免在某些速度條件下對炮彈進(jìn)行控制。 4)舵片控制力和力矩會影響r對τi的響應(yīng)特性,當(dāng)τ1、τ2、τ3、τ4大于某界限,或τ5小于某界限時,其值增大容易導(dǎo)致極限環(huán)半徑快速減小,故在炮彈研制過程中須對其大小進(jìn)行限制。 5)當(dāng)有控飛行滿足X>0時,舵片控制力和力矩會使極限環(huán)半徑相較無控飛行時的減小,彈丸穩(wěn)定性變差;又由于X中不含γF項(xiàng),故極限環(huán)半徑受前體滾轉(zhuǎn)角控制方位影響不大,即前體滾轉(zhuǎn)角控制方位改變對飛行穩(wěn)定性影響較小。3 數(shù)值仿真計算分析
3.1 仿真初始條件

3.2 計算結(jié)果分析




4 結(jié)論
