基于三維激光掃描的高拱壩倉面鋼筋網(wǎng)智能識別方法
2023-11-22 03:52:34譚堯升鄭驍峰任炳昱
水力發(fā)電 2023年11期
關鍵詞:混凝土
譚堯升,楊 帥,鄭驍峰,任炳昱
(1.中國長江三峽集團有限公司,北京 100038;2.中國三峽建工(集團)有限公司,四川 成都 610041;3.天津大學水利工程仿真與安全國家重點實驗室,天津 300072)
0 引 言
混凝土振搗作為混凝土壩施工建設過程中必不可少的一道工序,對混凝土壩的安全起到至關重要的作用。混凝土在攪拌、運輸和澆注過程,會夾帶進去由空氣所產(chǎn)生的氣泡,這些氣泡的存在會在混凝土內(nèi)部產(chǎn)生孔隙,從而增加了混凝土的滲透性、降低混凝土的強度,同時還會造成混凝土外觀缺陷,出現(xiàn)蜂窩、氣泡等現(xiàn)象[1]。混凝土振搗施工主要作用即排出混凝土中摻雜的氣泡,使混凝土密實,減少孔隙,以達到提高混凝土密實度和耐久度的目的。
目前應用于混凝土壩建設過程中的振搗機械主要包括振搗臺車和手持式振搗器。振搗臺車是一種裝有成組的機載插入式振動器,其主要用于混凝土壩大倉面、大體積混凝土振搗過程。但是當振搗臺車用于靠近鋼筋網(wǎng)、模板、止水片等附近區(qū)域時,由于其本身的精確度不高,加之駕駛人員的操作影響,很容易發(fā)生碰撞,其強大的振激力也會導致鋼筋網(wǎng)、模板等變形。因此,在實際施工中,靠近鋼筋網(wǎng)、模板等附近區(qū)域的混凝土振搗工作則需要由施工人員采用手持式振搗器完成。人工振搗雖然可以很好地解決鋼筋網(wǎng)、模板等附近區(qū)域的混凝土振搗問題,但人工振搗效率低,對施工人員操作能力有一定要求,一旦施工人員操作不熟或缺乏經(jīng)驗,就很容易導致振搗時間、插入角度等重要振搗參數(shù)不達標,從而難以保障混凝土強度。人工振搗還需要對施工區(qū)域進行作業(yè)順序配置,以防止發(fā)生重復振搗、漏振等問題,不便于施工管理。隨著傳統(tǒng)的人工振搗控制與物聯(lián)網(wǎng)、GNSS定位技術、超聲波探測技術等相結合,逐漸實現(xiàn)了智能振搗作業(yè)[2]。通過多元傳感器實時獲取、傳輸振搗時間、插入角度、插入深度等振搗參數(shù),并對其進行實時監(jiān)控反饋[3]是當前大壩混凝土振搗常用的控制手段。可適用于邊角區(qū)域的振搗機器人也開始得到研究。然而邊角區(qū)域鋼筋網(wǎng)密布,如何實現(xiàn)鋼筋網(wǎng)智能識別,為振搗機器人作業(yè)位置規(guī)劃是當前需要研究的重要內(nèi)容。
現(xiàn)有鋼筋識別技術多用于混凝土內(nèi)部鋼筋缺陷探測和鋼筋計數(shù)方面,張?zhí)烊餥4]利用在CNN神經(jīng)網(wǎng)絡模型框架基礎上設計出的SCNet對鋼筋混凝土的銹蝕裂縫進行識別,并驗證了其在不同環(huán)境下的可測性和優(yōu)越性;李姝凡[5]提出采用無監(jiān)督機器學習算法K-Means和卷積神經(jīng)網(wǎng)絡對探地雷達檢測過程中的干擾進行處理,實現(xiàn)了利用探地雷達實現(xiàn)混凝土內(nèi)部鋼筋病害的探測分析;林春旭[6]則在探地雷達的基礎上,利用深度學習方法實現(xiàn)利用SSD模型對地下鋼筋和管線的智能識別;王明明[7]在使用圖像識別技術對鋼筋進行匹配計數(shù)的同時,將算法編入Andriod系統(tǒng),搭建了一種基于Android的鋼筋斷面識別與計數(shù)平臺;趙豐年[8]通過對聲發(fā)射能量、峰值頻率和幅度等特征參數(shù)的分布規(guī)律進行分析,來識別鋼筋混凝土表面的不同破壞形式;徐茂輝等[9]針對雷達檢測鋼筋混凝土結構中存在的上層鋼筋遮擋下層鋼筋的問題,對上下層鋼筋相平行或垂直時的雷達圖像特征進行了研究,得出了一些對鋼筋混凝土的雷達檢測有用的結論。
同時,當前還有其他利用圖像分割[10]、圖像識別技術[11-12]對鋼筋數(shù)目進行統(tǒng)計的研究與應用。然而,上述研究都是對鋼筋本體或其表面的損壞形式進行識別和分析,缺少對鋼筋的識別定位分析,未能為施工現(xiàn)場中鋼筋密集區(qū)的智能化施工提供有效的鋼筋網(wǎng)格檢測方式。為此,本文主要針對施工環(huán)境中鋼筋網(wǎng)格的識別定位問題,采用理論分析與實踐論證相結合的方式進行研究。主要研究內(nèi)容包括:
(1)提出鋼筋網(wǎng)格識別方法。首先,通過激光雷達進行周圍環(huán)境感知,獲得倉面點云數(shù)據(jù)。其次,對獲得的點云數(shù)據(jù)進行計算,得到點云三維坐標。對點云進行篩選后,得到能夠表示鋼筋網(wǎng)格的點云坐標,并根據(jù)該部分點云坐標特征,得到鋼筋網(wǎng)格交叉點。最后,通過數(shù)學計算獲得鋼筋網(wǎng)格中心坐標。
(2)對鋼筋網(wǎng)格識別方法進行工程驗證。將本文提出的鋼筋網(wǎng)格識別方法應用于某混凝土壩工程,識別其倉面鋼筋網(wǎng)格點云圖,并與現(xiàn)場的鋼筋網(wǎng)格安裝信息進行比較,驗證激光雷達探測鋼筋網(wǎng)格的可行性和準確性。
1 激光雷達探測技術概述
1.1 激光雷達及其工作原理
激光雷達是激光探測及測距系統(tǒng)的簡稱,是以發(fā)射激光束來探測目標的位置、速度等特征量的雷達系統(tǒng),由激光發(fā)射單元和激光接收單元組成。其工作原理是向覆蓋范圍內(nèi)發(fā)射激光束,激光束打在物體上引起散射,然后接收從目標反射回來的信號,并與發(fā)射信號進行比較和適當處理,最終獲得目標的有關信息。激光雷達裝有多對激光發(fā)射接收模組,其電機可以以多種不同頻率的轉速驅動進行360°掃描,從而建立測量對象相對于激光雷達的三維坐標,如圖1所示。
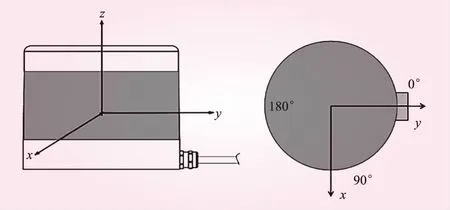
圖1 激光雷達坐標系和掃描方向示意
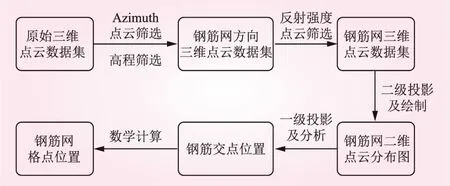
圖2 鋼筋網(wǎng)識別計算方法
激光雷達采用飛行時間測量法進行對象測量。激光雷達從發(fā)出激光脈沖開始計時,當激光遇到目標物體激光返回,接收端停止計時,其空間距離為
r=v(t2-t1)/2
(1)
式中,r為距離,m;v為光速,取3×108m/s;t1為激光雷達脈沖開始時間,s;t2為激光雷達脈沖結束時間,s。
1.2 激光雷達探測技術的應用
激光雷達掃描方法最開始被應用于海洋深度的測算,并在20世紀90年代與全球定位系統(tǒng)以及慣性導航系統(tǒng)相結合,實現(xiàn)了激光雷達掃描的定位定姿。隨著激光雷達的發(fā)展和其他技術的出現(xiàn)與完善,激光雷達探測掃描技術與更多的先進技術相結合,并逐漸應用于立體制圖、地質(zhì)學、城市規(guī)劃、環(huán)境探測和水利工程等領域,為國民經(jīng)濟和社會發(fā)展提供了重要的原始資料和技術方法。師恒等[13]采用激光雷達持續(xù)掃描火箭,對得到火箭的激光點云數(shù)據(jù)進行計算和分析,實現(xiàn)了火箭垂直起飛過程中的實時姿態(tài)測量;葉晟等[14]提出了一種改進的自適應參數(shù)DBSCAN算法,并將該算法用于點云聚類,實現(xiàn)了對近距離障礙物和遠距離目標的聚類,并在水面目標檢測中得到了驗證;張英等[15]通過無人機搭載三維激光雷達,對無人機巡線過程中的樹木進行點云獲取,經(jīng)過預處理后實現(xiàn)了三維激光雷達無人機樹障檢測和距離測量;王天璽[16]利用改進的隨機森林算法處理激光雷達掃描得到的點云噪聲,實現(xiàn)了行人的檢測和位置預測。綜上所述,激光雷達具有分割識別功能、障礙物追蹤功能和定位功能,因此,在復雜的高拱壩倉面施工環(huán)境中,使用激光雷達進行鋼筋網(wǎng)格的識別便具有了可能。
激光雷達之所以能得到廣泛應用,是因為相比較于傳統(tǒng)雷達,激光雷達采用了工作頻率更高的激光束代替了微波來進行目標的探測,這使得它能夠獲得更高的角度、距離和速度分辨率,也意味著它可以通過距離——多普勒成像技術來獲得較為清晰的目標圖像。除工作頻率高以外,激光束還具有方向性好,光束較窄的特點,加之激光雷達口徑較小的發(fā)射系統(tǒng)和較窄的接受區(qū)域,它就有了很好的抗有源干擾的能力,這在環(huán)境復雜和機械設備較多的水利施工環(huán)境中有著明顯的優(yōu)勢。激光雷達還具有體積小,質(zhì)量較輕的特點,以C32-xxxC型的激光雷達為例,其整體呈橢圓柱狀,最大外徑為120 mm,標準型質(zhì)量為1 600 g,能夠安裝在水利施工環(huán)境中大多數(shù)的施工設備上。目前,激光雷達在水利工程領域主要還是應用于測繪過程,但隨著技術的進步、硬件設備的完善和智慧水利的不斷推進,激光雷達必將應用于水利行業(yè)的多個領域[17],在大型水利工程的建設中也必然會發(fā)揮巨大的作用。
2 基于三維激光掃描的高拱壩倉面鋼筋網(wǎng)智能識別方法
基于三維激光掃描技術進行倉面鋼筋網(wǎng)識別的方法,即通過激光雷達進行周圍環(huán)境感知,獲得倉面點云數(shù)據(jù),并對獲得的點云數(shù)據(jù)進行計算,得到點云三維坐標。本文提出了基于點云數(shù)據(jù)的坐標分析方法,根據(jù)點云坐標特征,得到鋼筋網(wǎng)橫、縱向鋼筋交叉點,從而分析建立鋼筋網(wǎng)格點坐標,實現(xiàn)鋼筋網(wǎng)智能識別。
2.1 基于激光雷達的點云模型采集
本文采用32線激光雷達。激光雷達發(fā)射激光束,通過測量光線發(fā)射出去打到物體反射回來的時間來計算激光雷達到目標物體之間的距離并以此形成數(shù)據(jù)點,這個過程可能會得到數(shù)百萬個數(shù)據(jù)點,用于描述同一物體的數(shù)據(jù)點則像云一樣匯聚在一起,稱之為“點云”。激光雷達點云具有不均勻性,目標距離近密度大,目標距離遠密度小。激光雷達點云數(shù)據(jù)中的每一個點都包含了三維坐標信息(即x、y、z)、顏色信息、反射強度信息、回波次數(shù)信息等。通過激光雷達掃描得到的點云數(shù)據(jù)主要以數(shù)據(jù)包的形式儲存。對數(shù)據(jù)包進行解析,可以得到32線激光雷達每一線的相對水平角度、測距信息、強度數(shù)據(jù)等,這為后續(xù)各點的三維坐標屬性,即x、y、z值的計算提供了數(shù)據(jù)基礎。
基于該方法,實現(xiàn)點云數(shù)據(jù)采集,主要包括點號(point ID)、空間(x、y、z)坐標、方位角(azimuth)、距離(distance)、反射強度(intensity)、雷達通道(laser ID)、調(diào)節(jié)時間(adjustment)、時間戳(timestamp)等。
方位角(即水平角度值)為標識數(shù)據(jù)塊32次激光發(fā)射中第1次發(fā)射測距時的角度值,是32線激光雷達中0號通道的角度值,單位為0.01°。其他通道所對應的方位角需要經(jīng)過插值得到。該角度為相對值,由于32線激光雷達的發(fā)射器由多列組成,若要計算水平角度值則需要再該角度上加上一個水平修正角度,修正角度順時針為正,逆時針為負,它同樣因激光雷達通道而異,一般在設備包中定義,每臺雷達固定不變。
距離值主要通過將數(shù)據(jù)包中的十六進制數(shù)轉換為十進制數(shù)并乘以相應的單位得到。
在上述數(shù)據(jù)的基礎上,極坐標下的角度和距離信息即可轉化到右手笛卡爾坐標系下的(x、y、z)坐標,轉換關系為
(2)
式中,α為垂直角度;θ為水平旋轉角度;x、y、z分布為極坐標投影到x、y、z軸上的坐標。
2.2 鋼筋網(wǎng)識別計算方法
鋼筋網(wǎng)識別主要通過點云數(shù)據(jù)篩選和點云數(shù)據(jù)特征信息統(tǒng)計實現(xiàn)。主要步驟為:
(1)按照水平角度Azimuth進行第一次點云數(shù)據(jù)篩選,選擇所探測的鋼筋網(wǎng)角度范圍,得到鋼筋網(wǎng)方向點云數(shù)據(jù)。
(2)對步驟(1)中的點云依照坐標進行篩選,刪除0高程或倉面高程坐標的點云數(shù)據(jù)。
(3)對剩余點云數(shù)據(jù)按照反射強度進行篩選,得到鋼筋網(wǎng)點云坐標。
(4)對篩選過后的點云數(shù)據(jù)向鋼筋網(wǎng)所在平面進行二維投影,得到鋼筋網(wǎng)點云分布圖,該點云分布圖已初步具有鋼筋網(wǎng)格的形狀。對上述二維圖點云分別進行x、y兩個方向的一維投影。以x方向為例,對x方向的坐標軸進行劃分,得到若干個區(qū)間,將投影至各個區(qū)間的點云數(shù)量進行統(tǒng)計,得到點云分布直方圖。直方圖中所顯示的點云分布集中位置即為一根鋼筋的位置,將兩個方向上的鋼筋位置進行組合,得到縱向鋼筋與橫向鋼筋的交點位置,記為(xn,yn)。
(5)根據(jù)各個交點位置的坐標(xn,yn)進行計算,得到鋼筋網(wǎng)格點中心位置。
3 工程實際
某高混凝土壩工程位于我國西南地區(qū),最大壩高289 m,水庫正常蓄水位825 m。該工程倉面上下游面布置雙層鋼筋網(wǎng),如圖3所示。倉面最外層為模板,向內(nèi)分別為外層鋼筋網(wǎng)、內(nèi)層鋼筋網(wǎng)。外層鋼筋網(wǎng)與模板之間的距離為40 cm,內(nèi)外層鋼筋網(wǎng)之間的距離為30 cm,同向鋼筋之間的距離為30 cm。
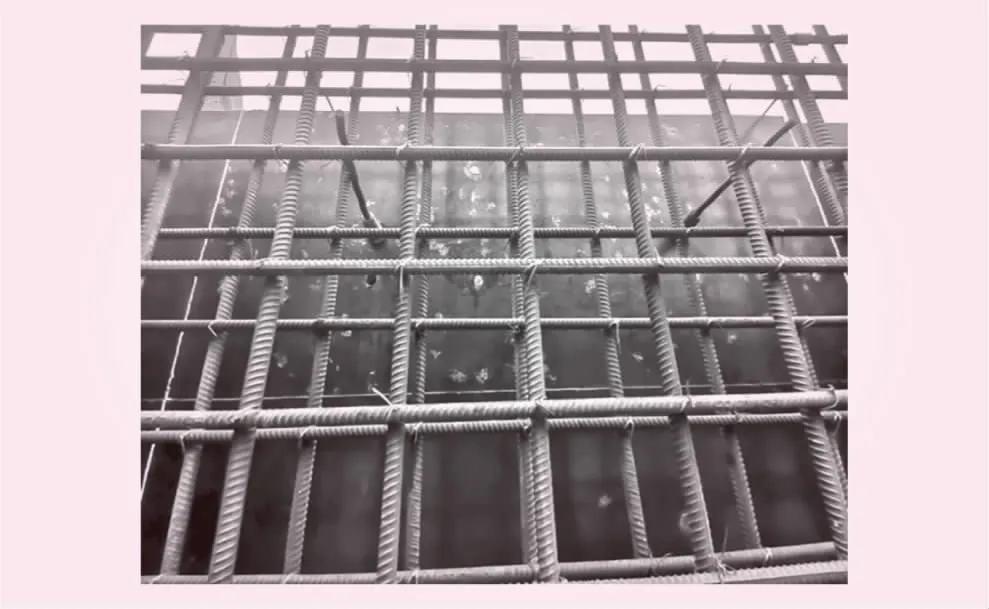
圖3 某工程上下游鋼筋網(wǎng)示意
本次工程采用的激光雷達型號為32線均勻1°激光雷達,其底座有2個定位孔和5個安裝孔,數(shù)據(jù)線接口為水平角0°位置(也可以設置為水平180°),雷達沿順時針旋轉。32線激光雷達纜線為10芯屏蔽線,主要用于電源連接、GPS信號的授時接收和差分信號的發(fā)射與接受。
激光雷達在倉面的擺放位置如圖4所示。激光雷達距離內(nèi)層鋼筋網(wǎng)92 cm,距離地面高度70 cm。激光雷達現(xiàn)場探測并經(jīng)過計算得到點云數(shù)據(jù)表,通過MATLAB對點云數(shù)據(jù)表中的數(shù)據(jù)進行三維散點圖繪制,得到原始點云數(shù)據(jù)三維分布圖,如圖5所示。

圖4 現(xiàn)場激光雷達擺放位置
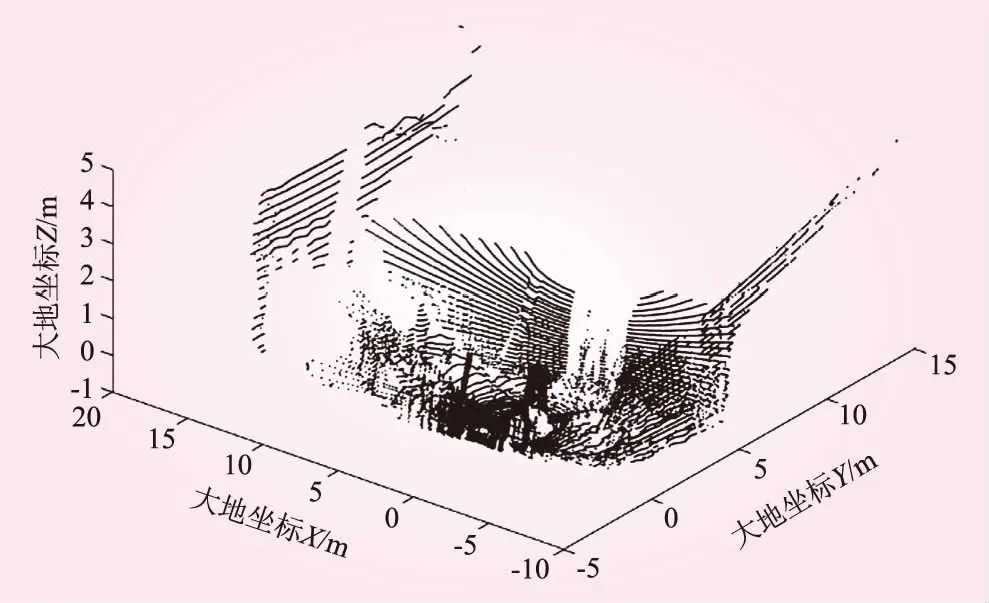
圖5 原始點云數(shù)據(jù)三維分布
根據(jù)激光雷達接線口位置可以推斷,點云中鋼筋網(wǎng)所在水平角度(azimuth)范圍約為100°至260°,對點云數(shù)據(jù)進行篩選,同時刪除倉面高程坐標點,并對剩余點云數(shù)據(jù)按照反射強度進行篩選,保留反射強度低于64的點云數(shù)據(jù),得到鋼筋網(wǎng)點云數(shù)據(jù)。對該部分點云向鋼筋網(wǎng)所在平面進行二維投影,得到鋼筋網(wǎng)點云散點圖,如圖6所示。
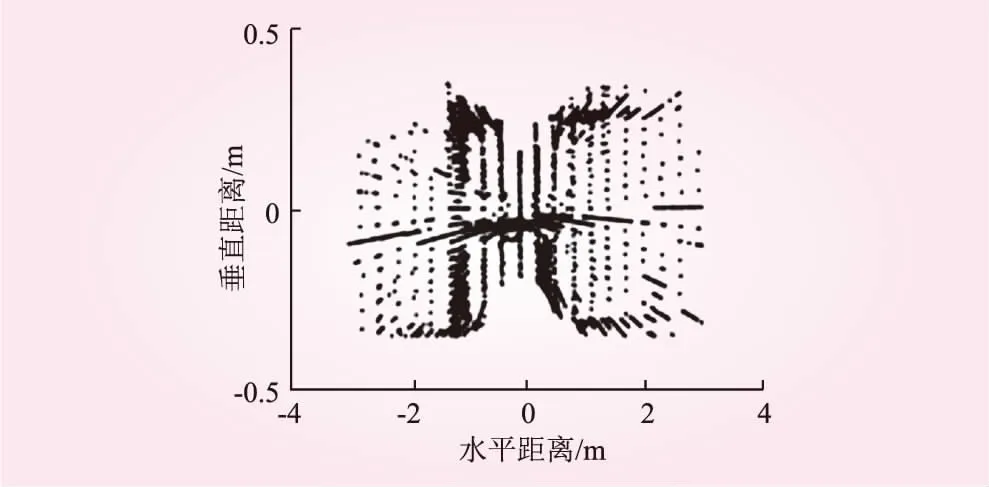
圖6 鋼筋網(wǎng)點云二維分布
由圖5可知,初步看出鋼筋網(wǎng)格的形狀以及縱向橫向的鋼筋分布。但由于激光雷達探測精度隨距離增大逐漸降低,故探測到的有效鋼筋點云呈現(xiàn)出中間部位點云較為密集,而兩側點云較為稀疏。加之32線激光雷達的多線激光束之間間隔一定角度,故越遠的物體,其縱向點之間的距離越大。而當物體距離激光雷達距離較近時,由于激光雷達個激光線束還未能充分發(fā)散開,這在一定程度上使得其掃描到的物體可能不全。因此,圖6中掃描得到的鋼筋網(wǎng)格點云中,由于位于中間部位的鋼筋距離激光雷達較近,其形成的點云也較短也較為密集,而兩側的稍遠位置的鋼筋掃描得到的鋼筋點云則較長。因此,可知激光雷達的擺放位置極其與目標之間的相對距離對其掃描得到的點云分布有著明顯的影響。
對篩選得到的鋼筋網(wǎng)點云向x軸和y軸投影,并分別按照0.1和0.02的區(qū)間進行劃分,得到點云分布直方圖,如圖7所示。由圖7可知,由于目標距離越遠,激光雷達的精度越低,因此激光雷達所檢測到的鋼筋網(wǎng)格點云呈現(xiàn)中間(距離近)較多,兩側(遠)較少的分布,其中點云集中部位為垂直該方向的鋼筋,點云分布稀疏的為平行于該方向的鋼筋,故每當點云突增時,便可以判定該位置有一根垂直于該方向的鋼筋出現(xiàn)。
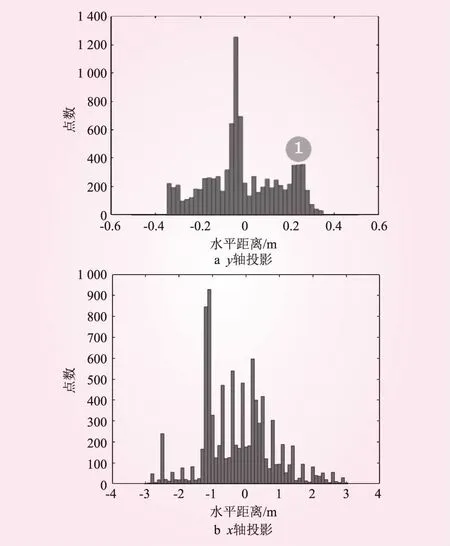
圖7 y軸投影(上)和x軸投影(下)點云分布直方圖
在圖7a中,點云數(shù)據(jù)分布較為密集的區(qū)間為橫向鋼筋分布區(qū)域。由中心向兩側點云數(shù)據(jù)逐漸減少,當點云數(shù)據(jù)突然呈現(xiàn)增多時,為兩側橫向鋼筋分布區(qū)域。例如,圖8所標記的三根直方圖統(tǒng)計條紋,對應于圖7a中標記位置(由于0.2區(qū)間點云個數(shù)少于0.22區(qū)間點云個數(shù)的60%,故不計算在內(nèi)),其統(tǒng)計區(qū)間中位數(shù)、統(tǒng)計點云個數(shù)分別為(0.22,351)、(0.24,353)、(0.26,357),總統(tǒng)計點云個數(shù)為1061,各統(tǒng)計區(qū)間所占頻率分別為0.331、0.333、0.336。由各區(qū)間中位數(shù)乘以頻率,并最終求和得到該處橫向鋼筋分布直線約為y=0.24。最終得到3根橫向鋼筋分布點為y=0.24,y=-0.04,y=-0.32。

圖8 部分區(qū)間點云統(tǒng)計詳細信息
在圖7b中,點云數(shù)據(jù)分布較為密集的區(qū)間為縱向鋼筋分布區(qū)域。由中心向兩側點云數(shù)據(jù)逐漸減少,當點云數(shù)據(jù)突然呈現(xiàn)部分增多時,為縱向鋼筋分布區(qū)域。根據(jù)直方圖分布得到縱向鋼筋分布點為x=[-2.8,-2.5,-2.2,-1.9,-1.6,-1.148,-0.7,-0.4,-0.1,0.2,0.5,0.8,1.1,1.4,1.7,2.0,2.3,2.6,2.9]。其中,點x=-1.148誤差較大,可能存在較大干擾,故舍棄。對x軸投影點云分布直方圖按區(qū)間0.02劃分得到分布如圖9所示,得到分布點與上述相差均在0.2以內(nèi)。
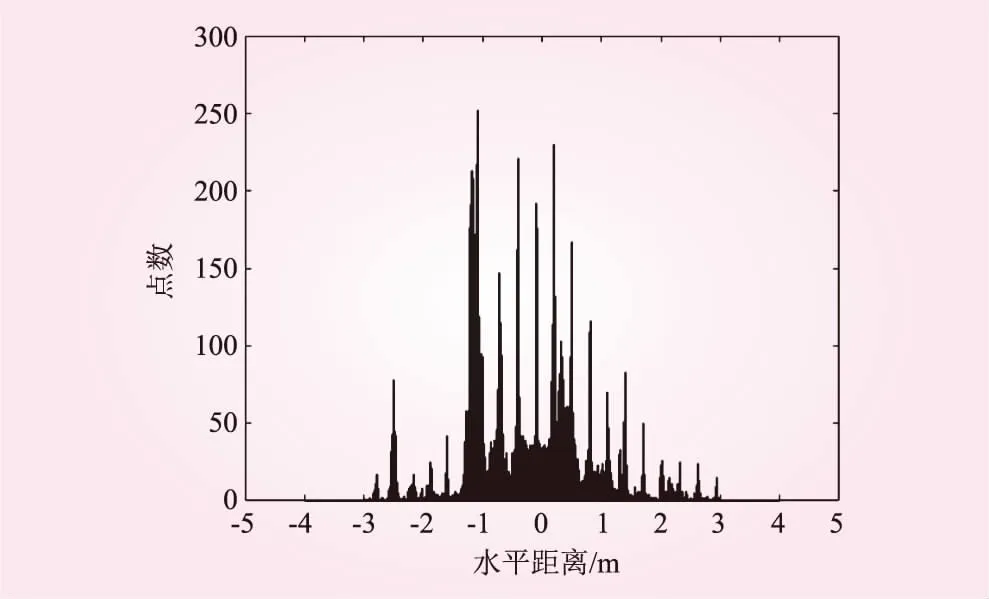
圖9 區(qū)間寬度為0.02的x軸投影點云分布直方圖
由上述y分布點及x分布點兩兩組合可以得到鋼筋交點坐標,如圖10所示。
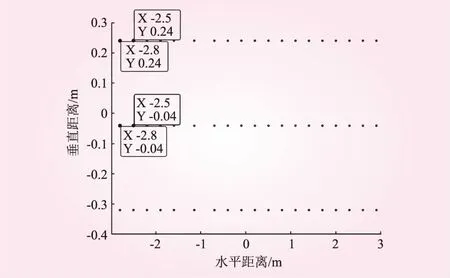
圖10 鋼筋交點坐標
由相鄰鋼筋交點坐標求和得平均值,即可得到鋼筋網(wǎng)格點坐標,最終所得鋼筋網(wǎng)格點如圖11所示。
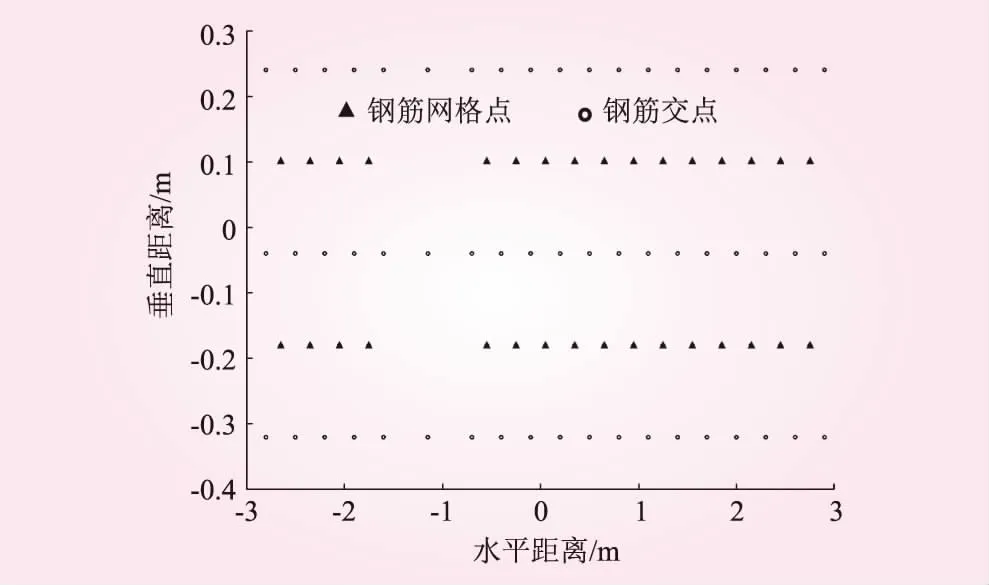
圖11 鋼筋網(wǎng)格點坐標
根據(jù)實際工程應用效果,可得y方向鋼筋間距約為28 cm,x方向鋼筋間距約為28~30 cm,誤差約為6%。縱向鋼筋網(wǎng)格點數(shù)量探測數(shù)目為2,橫向鋼筋網(wǎng)格點探測數(shù)目為15個左右,在工程應用當中可以較好地對鋼筋網(wǎng)進行識別定位。
4 結 語
本文提出了一種通過三維激光掃描對高拱壩倉面鋼筋網(wǎng)進行智能識別的方法,該方法通過對激光雷達掃描到的點云進行數(shù)據(jù)分析與處理,得到有效點云。對有效點云進行統(tǒng)計計算來實現(xiàn)高拱壩倉面鋼筋網(wǎng)的識別。工程實際驗證該方法能夠有效地識別縱向橫向鋼筋之間的間距,并能夠通過數(shù)據(jù)分析處理得到鋼筋網(wǎng)格點坐標。但在進行分析處理的過程中,也發(fā)現(xiàn)該方法存在的問題:
(1)激光雷達的識別精度與距離呈負相關,距離越大,其精度越低,故識別范圍有限。
(2)本文所提出的點云數(shù)據(jù)的篩選方法依賴于激光雷達的擺放與目標區(qū)域的方位,還有待進一步優(yōu)化。
(3)相比較于激光雷達所識別的其他物體而言,鋼筋網(wǎng)格的識別精度較低,且該方法難以對噪聲點進行識別和處理。
猜你喜歡
現(xiàn)代裝飾(2022年5期)2022-10-13 08:48:04
建材發(fā)展導向(2022年10期)2022-07-28 03:04:00
建材發(fā)展導向(2021年7期)2021-07-16 07:08:04
水利規(guī)劃與設計(2020年1期)2020-05-25 08:01:30
小哥白尼(趣味科學)(2019年3期)2019-06-17 11:57:44
上海建材(2018年3期)2018-08-31 02:27:52
江西建材(2018年2期)2018-04-14 08:01:05
江西建材(2018年2期)2018-04-14 08:00:10
水利技術監(jiān)督(2017年2期)2017-05-17 05:19:34
水利科技與經(jīng)濟(2016年2期)2016-04-09 02:09:13
