基于北斗短報文的海洋觀測實時通信系統(tǒng)的設(shè)計與研發(fā)
2023-11-21 07:44:34徐振華葛振營楊樹國陳永華
海洋科學(xué) 2023年8期
關(guān)鍵詞:數(shù)據(jù)庫系統(tǒng)
姜 斌, 徐振華, 葛振營, 楊樹國, 陳永華
基于北斗短報文的海洋觀測實時通信系統(tǒng)的設(shè)計與研發(fā)
姜 斌1, 2, 3, 徐振華2, 葛振營4, 楊樹國3, 陳永華2
(1. 青島科技大學(xué)機電工程學(xué)院, 山東 青島 266061; 2. 中國科學(xué)院海洋研究所, 山東 青島 266071; 3. 青島科技大學(xué)數(shù)理學(xué)院, 山東 青島 266061; 4. 青島科技大學(xué)體育學(xué)院, 山東 青島 266061)
北斗一代和北斗二代短報文每次通信數(shù)據(jù)長度只有78個字節(jié), 每次通信后間隔60秒或者300秒才能進行下一次通信, 遠遠滿足不了海洋觀測實時通信的需求。設(shè)計了一套基于北斗短報文的海洋觀測實時通信系統(tǒng), 北斗多卡機作為數(shù)據(jù)發(fā)送端, 采用哈夫曼壓縮算法將觀測數(shù)據(jù)壓縮后分成多個數(shù)據(jù)包, 通過多個北斗卡分別發(fā)送, 岸站接收系統(tǒng)接收到分包的數(shù)據(jù)后, 將接收的數(shù)據(jù)包解壓縮并整合成完整的觀測數(shù)據(jù)。哈夫曼壓縮算法將觀測數(shù)據(jù)壓縮50%左右, 將1組觀測數(shù)據(jù)壓縮后發(fā)送3次, 通過岸上3個月和海上1個月的測試, 觀測數(shù)據(jù)接收成功率達到了96%以上, 驗證了基于北斗短報文的海洋觀測實時通信系統(tǒng)的可行性和實用性。
Linux; 海洋觀測; 北斗衛(wèi)星; 數(shù)據(jù)庫; 哈夫曼壓縮算法
實時海洋觀測需要將每次采集的數(shù)據(jù)實時傳回到岸站接收系統(tǒng), 以幫助完成海洋科學(xué)研究和海洋預(yù)警等工作。目前, 海洋觀測的實時回傳主要依靠通信衛(wèi)星完成, 常見的通信衛(wèi)星包括銥星、天通和北斗衛(wèi)星等[1]。相比于銥星、天通衛(wèi)星, 北斗通信衛(wèi)星不僅終端設(shè)備便宜, 而且沒有通信費, 做到了物美價廉。而且北斗衛(wèi)星真正做到了端到端的通信, 具有很好的保密性[2], 如圖1所示, 海洋觀測數(shù)據(jù)通過北斗衛(wèi)星通信模塊將觀測數(shù)據(jù)發(fā)送到北斗衛(wèi)星, 北斗衛(wèi)星將數(shù)據(jù)轉(zhuǎn)發(fā)到岸站接收系統(tǒng)的北斗衛(wèi)星通信模塊, 整個過程沒有涉及地球站等地面通信設(shè)備, 保證了數(shù)據(jù)安全。

圖1 北斗衛(wèi)星通信的端到端通信
目前, 海洋觀測通信還是以北斗一代和北斗二代短報文為主, 但是北斗一代和北斗二代短報文通信單條短報文長度只有78個字節(jié), 通信頻率為60 s/條或者300 s/條, 顯然無法滿足實時海洋觀測通信需求。采用北斗多卡機作為數(shù)據(jù)發(fā)送模塊, 最多可以放置16張北斗卡, 每次最多發(fā)送16個短報文數(shù)據(jù), 即每次通信數(shù)據(jù)長度最長為1 248個字節(jié)。根據(jù)海洋觀測數(shù)據(jù)的特點, 采用合適的壓縮算法, 可以提高北斗衛(wèi)星通信數(shù)據(jù)量。北斗多卡機的功耗與單卡北斗模塊相當, 因此北斗多卡機也不存在功耗過大問題[3]。北斗短報文通訊本身可靠性較高, 但沒有反饋信息, 發(fā)送端無法知道接收端是否收到數(shù)據(jù)[4-5]。海洋觀測通過北斗多卡機將分包觀測數(shù)據(jù)發(fā)送到岸站后, 通過岸站接收系統(tǒng)接收分包數(shù)據(jù), 將分拆的北斗數(shù)據(jù)重組恢復(fù)成原始的觀測數(shù)據(jù), 再將數(shù)據(jù)分析、存儲和顯示, 以滿足海洋科學(xué)研究和海洋預(yù)警的要求。
聲學(xué)多普勒流速剖面儀(Acoustic Dopler Veloci-ty Profiler, ADCP)和溫鹽深儀(Temperature Condu-c-tivity Depth, CTD)是最常使用的海洋調(diào)查儀器, 本文將搭載2套ADCP和4套CTD的海洋觀測數(shù)據(jù)通過北斗多卡機發(fā)送回岸站, 采用哈夫曼壓縮算法對觀測數(shù)據(jù)進行壓縮, 以降低通訊帶寬, 為了保證數(shù)據(jù)接收的成功率, 每組觀測數(shù)據(jù)發(fā)送3次, 觀測數(shù)據(jù)接收成功率達到了96%以上, 驗證了基于北斗短報文的大數(shù)據(jù)量海洋觀測實時通信的可行性和實用性。
1 系統(tǒng)總體設(shè)計
基于北斗短報文的海洋觀測實時通信系統(tǒng)的總體設(shè)計如圖2所示, 系統(tǒng)由海洋觀測設(shè)備、北斗衛(wèi)星和岸基3部分組成, 海洋觀測設(shè)備由電子艙、連接纜和傳感器節(jié)點3部分組成, 在電子艙中, 電源為主控制器和北斗多卡機提供能源, 主控制器通過連接纜從傳感器獲得觀測數(shù)據(jù), 對觀測數(shù)據(jù)處理分包后通過北斗多卡機將觀測分包數(shù)據(jù)發(fā)送到北斗衛(wèi)星上, 北斗衛(wèi)星再將觀測分包數(shù)據(jù)發(fā)送到岸基的岸站接收系統(tǒng)上。其中, 傳感器節(jié)點上的ADCP通過有線連接與實時海洋觀測電子艙連接, 傳感器節(jié)點上的CTD通過耦合連接與電子艙連接。
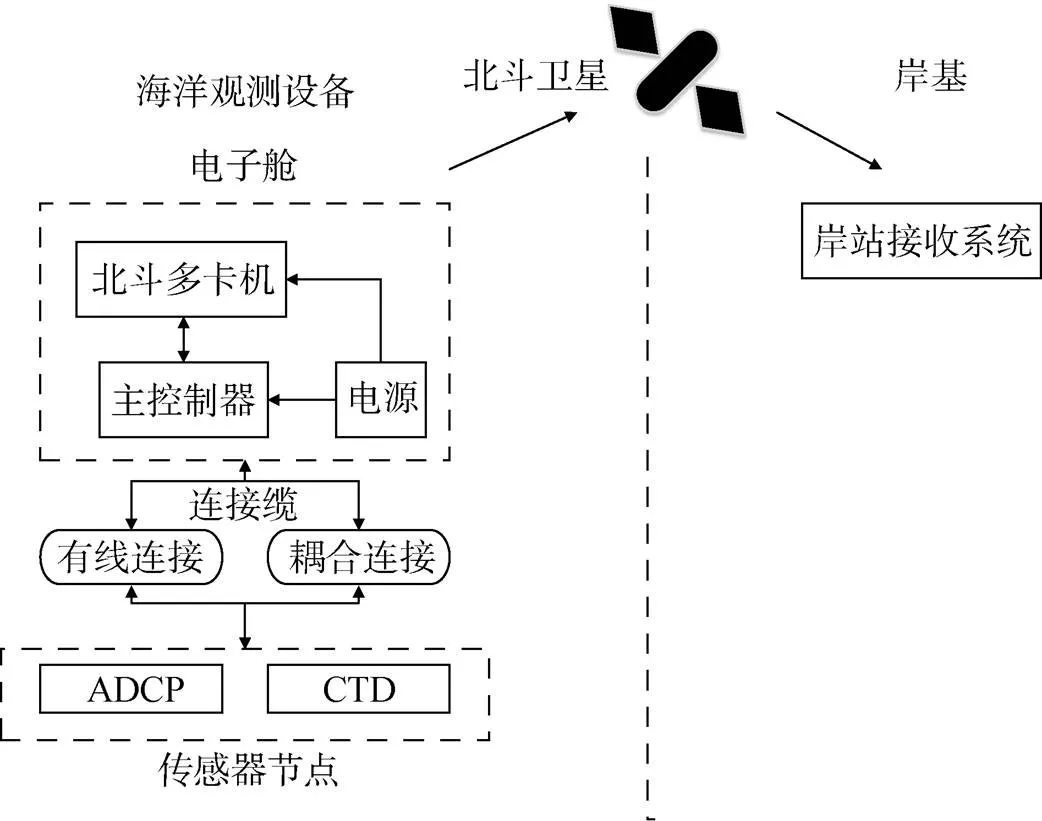
圖2 系統(tǒng)總體設(shè)計
1.1 電子艙設(shè)計
電子艙中的主控制器采用Linux操作系統(tǒng), 可以并行完成多項任務(wù), 任務(wù)之間的數(shù)據(jù)交互通過數(shù)據(jù)庫完成, 電子艙中各個進程與傳感器節(jié)點、岸站接收系統(tǒng)的交互流程如圖3所示。ADCP進程、CTD進程和數(shù)據(jù)發(fā)送進程并行執(zhí)行。ADCP傳感器是定時自動啟動, 觀測完多層的流速和流向后, 通過有線連接, 向主控制器發(fā)送觀測數(shù)據(jù), 因此主控制器上的ADCP進程在ADCP傳感器開始工作時就一直等待ADCP, 接收到ADCP的觀測數(shù)據(jù)后, 將ADCP觀測數(shù)據(jù)存入數(shù)據(jù)庫中, ADCP進程結(jié)束; CTD傳感器需要喚醒后才能開始工作, 主控制器上的CTD進程開始后, 通過耦合連接喚醒CTD傳感器開始工作, 喚醒后的CTD傳感器開始采集溫度、鹽度和深度數(shù)據(jù), 再通過耦合連接發(fā)送到主控制器, 主控制器上的CTD進程接收到CTD傳感器的數(shù)據(jù)后, 存入數(shù)據(jù)庫中, CTD進程結(jié)束; 數(shù)據(jù)發(fā)送進程開始后, 查詢數(shù)據(jù)庫中的數(shù)據(jù)是否有最新數(shù)據(jù), 當CTD傳感器數(shù)據(jù)和ADCP傳感器新數(shù)據(jù)更新后, 將所有數(shù)據(jù)整合后壓縮, 經(jīng)過數(shù)據(jù)分包, 將觀測分包數(shù)據(jù)通過北斗多卡機上的不同北斗卡發(fā)送到北斗衛(wèi)星后, 數(shù)據(jù)發(fā)送進程結(jié)束。
北斗一代和北斗二代的短報文通信每次只有78個字節(jié)的通信量[6-7]。設(shè)計了1套簡單有效的數(shù)據(jù)通信格式, 在為重組觀測數(shù)據(jù)提供可靠保證的前提下, 盡量多地保留有效通信數(shù)據(jù)的字節(jié)數(shù)。如圖4所示, 北斗分包數(shù)據(jù)格式由觀測標記、包信息、有效數(shù)據(jù)和校驗組成。觀測標記由2個字節(jié)組成, 計數(shù)范圍為0~65 535, 以開始布放時間為起始時間, 每增加10 min, 觀測標記加1, 每次所有的觀測數(shù)據(jù)采用同一個觀測標記, 岸站接收系統(tǒng)接收到數(shù)據(jù)后, 可以根據(jù)觀測標記篩選出同一次的觀測數(shù)據(jù), 并根據(jù)觀測標記計算出觀測時間; 包信息由1個字節(jié)組成, 由于北斗多卡機最多可以搭載16張北斗卡, 4個位即可表示完整, 因此設(shè)計包信息高4位表示1次觀測數(shù)據(jù)被分成了幾個包, 包信息低4位表示的是該包是第幾個包; 校驗由1個字節(jié)組成, 對分包數(shù)據(jù)進行CRC校驗, 以保證數(shù)據(jù)傳輸?shù)臏蚀_性。
1.2 壓縮算法設(shè)計
哈夫曼壓縮算法對出現(xiàn)頻率高的字符可以用較短的編碼表示, 實現(xiàn)壓縮效率最大化。由于海洋觀測系統(tǒng)的數(shù)據(jù)經(jīng)常出現(xiàn)的字符高頻的比較多, 哈夫曼壓縮是比較適合的算法, 用于降低海洋觀測的數(shù)據(jù)量[8]。
哈夫曼壓縮算法的步驟如下:
(1)構(gòu)造哈夫曼編碼表。遍歷海洋觀測數(shù)據(jù), 得到每個字符出現(xiàn)的頻次, 將出現(xiàn)頻次最低的2個字符作為子節(jié)點, 左節(jié)點頻次大于右節(jié)點頻次, 構(gòu)造分支節(jié)點, 同時將分支節(jié)點作為新字符, 頻次作為子頻數(shù)之和, 進行重新排序, 重復(fù)以上步驟直到所有字符編碼完成, 對編碼樹進行排序, 左節(jié)點為0, 右節(jié)點為1, 直到編碼樹底端, 根據(jù)編碼情況構(gòu)造哈夫曼編碼表。
(2)轉(zhuǎn)碼壓縮。根據(jù)構(gòu)造的哈夫曼編碼表將觀測數(shù)據(jù)轉(zhuǎn)換為0-1編碼, 每8個編碼進行1次分割, 作為1個字節(jié)數(shù)據(jù)寫入, 最后不足8位則需要補0, 直到剛好達到8位。將哈夫曼編碼表寫入。
圖5是哈夫曼壓縮算法的流程圖, 最后壓縮數(shù)據(jù)是由哈夫曼編碼表和編碼表組成的壓縮數(shù)據(jù)。解壓時, 根據(jù)哈夫曼編碼表將編碼表無損恢復(fù)成觀測數(shù)據(jù)。
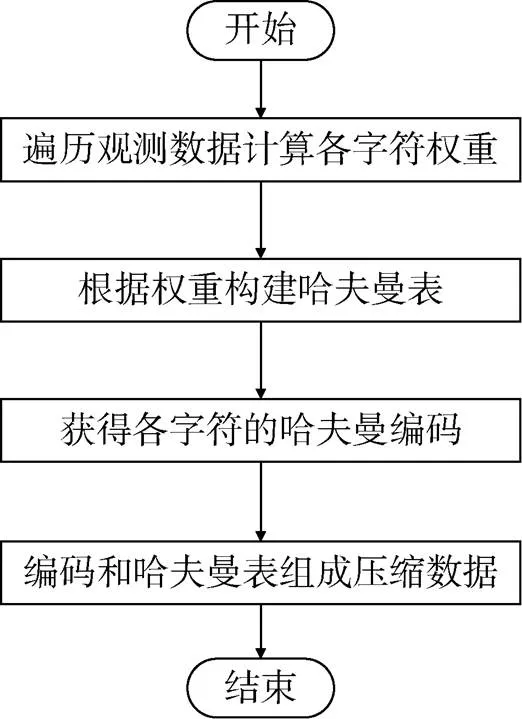
圖5 哈夫曼壓縮算法流程圖
2 岸站接收系統(tǒng)設(shè)計及實現(xiàn)
如圖6所示, 岸站接收系統(tǒng)通過北斗終端接收到分包的數(shù)據(jù)后, 將接收的數(shù)據(jù)包解壓整合成完整的觀測數(shù)據(jù), 補位丟失的數(shù)據(jù)包、刪除冗余的數(shù)據(jù)包和重新排序數(shù)據(jù)包, 并將數(shù)據(jù)分析、存儲和顯示。岸站接收系統(tǒng)采用CS架構(gòu), 服務(wù)器端負責功能接收數(shù)據(jù)、整合數(shù)據(jù)和數(shù)據(jù)入庫, 客戶端負責從數(shù)據(jù)庫中獲得數(shù)據(jù), 對數(shù)據(jù)分析、存儲和顯示。
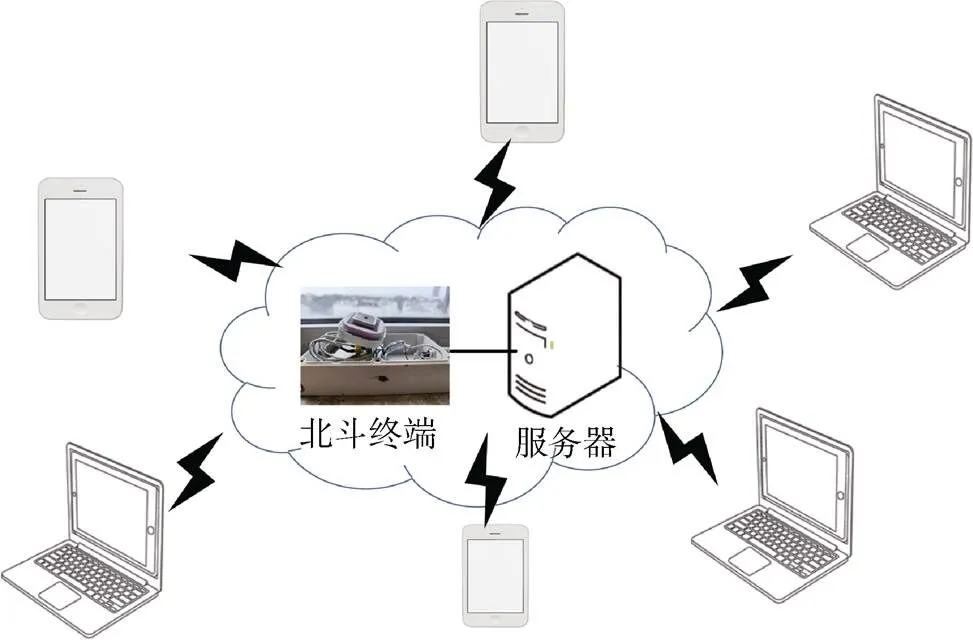
圖6 實時海洋觀測的岸站接收系統(tǒng)
2.1 服務(wù)器端
北斗終端接收到北斗衛(wèi)星傳來的數(shù)據(jù)后, 將數(shù)據(jù)發(fā)送到服務(wù)器上, 服務(wù)器上的服務(wù)器端軟件首先將數(shù)據(jù)接收到數(shù)據(jù)庫A中, 數(shù)據(jù)庫A的存儲格式如表1所示。服務(wù)器上的服務(wù)器端軟件定時讀取數(shù)據(jù)庫A中的數(shù)據(jù)進行整合, 將恢復(fù)的觀測數(shù)據(jù)存儲到數(shù)據(jù)庫B中, 數(shù)據(jù)庫B的存儲格式如表2所示。
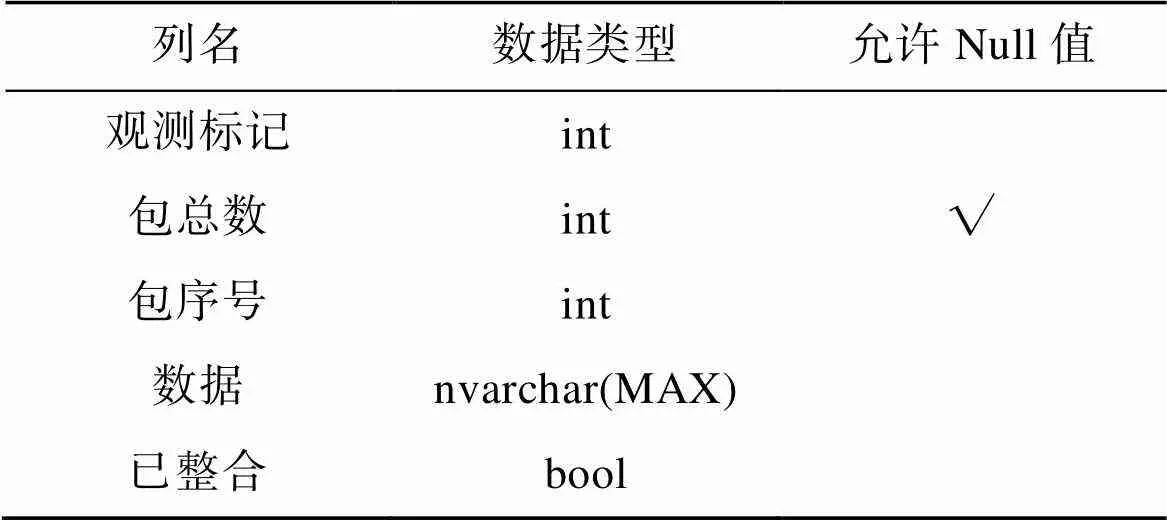
表1 數(shù)據(jù)庫A存儲格式
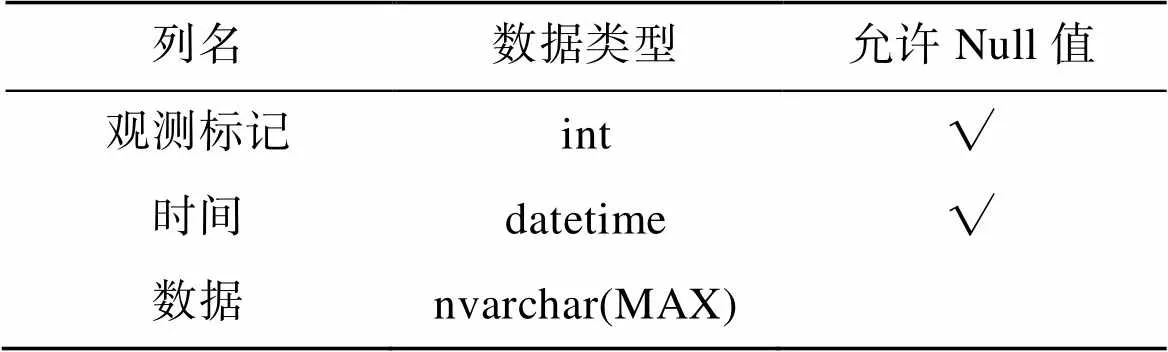
表2 數(shù)據(jù)庫B存儲格式
北斗分包數(shù)據(jù)整合的流程圖如圖7所示。開始后首先查找數(shù)據(jù)庫A中“已整合”標記為False的數(shù)據(jù), 查找到后, 在數(shù)據(jù)庫B中查找該數(shù)據(jù)的觀測標記是否已經(jīng)存在, 如果存在, 根據(jù)該數(shù)據(jù)的包序號將數(shù)據(jù)庫B中相同觀測標記的數(shù)據(jù)進行更新, 如果不存在, 根據(jù)觀測標記, 在數(shù)據(jù)庫B中插入該數(shù)據(jù), 時間是根據(jù)觀測標記計算得到。在數(shù)據(jù)庫A中將該數(shù)據(jù)“已整合”標記為True, 判斷數(shù)據(jù)庫A中“已整合”標記是否全部為True, 如果不是, 繼續(xù)查找數(shù)據(jù)庫A中數(shù)據(jù), 如果數(shù)據(jù)庫A中數(shù)據(jù)全部已經(jīng)整合, 北斗分包數(shù)據(jù)整合結(jié)束。
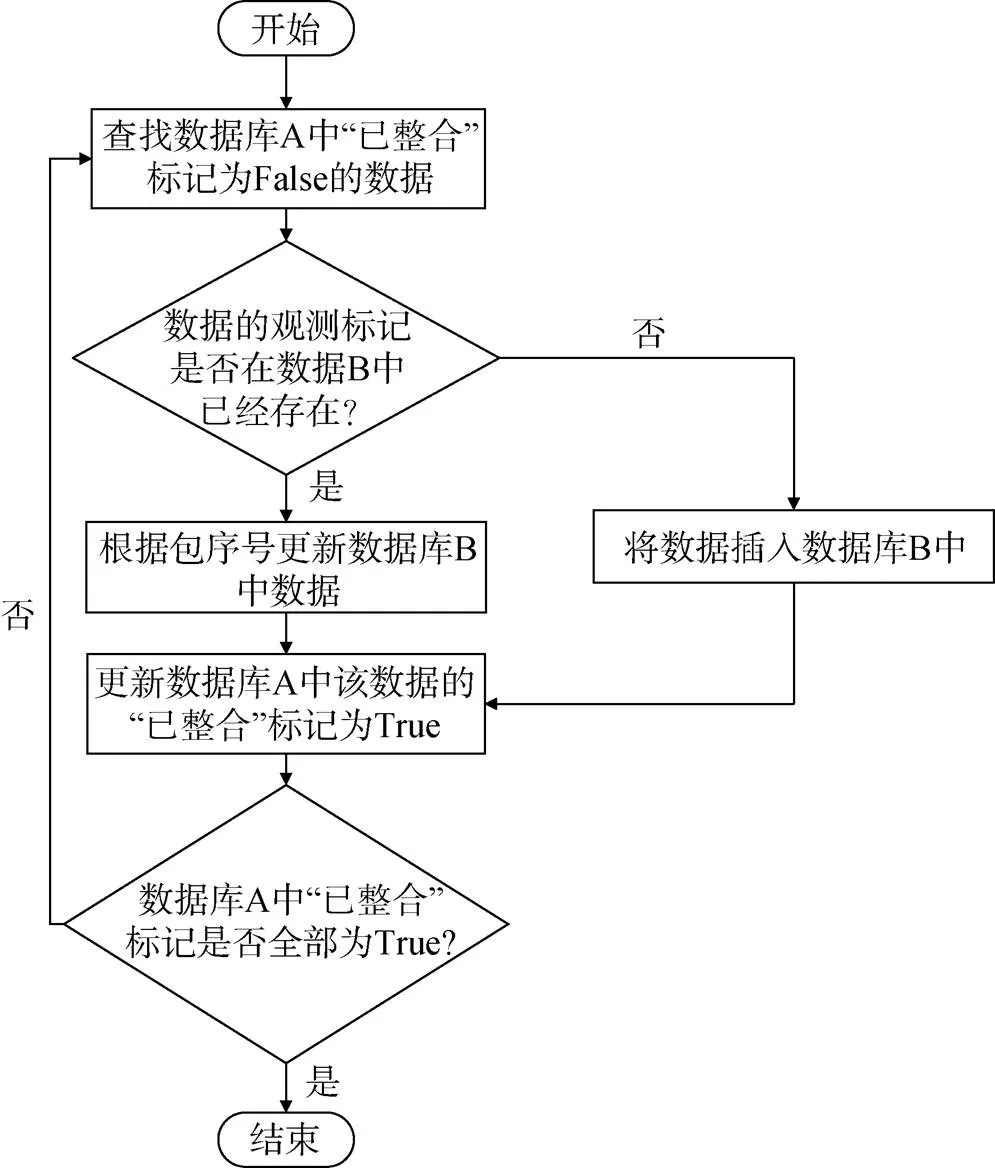
圖7 北斗分包數(shù)據(jù)整合流程圖
2.2 客戶端
實時海洋觀測系統(tǒng)的岸站接收系統(tǒng)的客戶端從服務(wù)器的數(shù)據(jù)庫B中申請到數(shù)據(jù)后, 按照解析規(guī)則, 將數(shù)據(jù)解析成有意義的參數(shù)。客戶端軟件根據(jù)功能劃分成最新數(shù)據(jù)、數(shù)據(jù)查詢和數(shù)據(jù)報表3個功能。
岸站接收系統(tǒng)客戶端軟件的最新數(shù)據(jù)功能如圖8所示, 將申請的最新數(shù)據(jù)解析成溫度、鹽度、深度和各層的流速、流向數(shù)據(jù), 最新數(shù)據(jù)實時更新, 以幫助實時了解海洋的觀測情況。岸站接收系統(tǒng)客戶端軟件的數(shù)據(jù)查詢功能如圖9所示, 選擇任一設(shè)備的任一參數(shù)(圖9中選擇的是上海流的流速, 即ADCP朝向海面測量的各層海流流速), 再選擇任一時間段, 可以顯示該參數(shù)在該時間段內(nèi)的曲線變化情況。岸站接收系統(tǒng)客戶端軟件的數(shù)據(jù)報表功能如圖10所示, 選擇任一設(shè)備(圖10中選擇的是上海流, 即ADCP朝向海面測量的各層海流流速), 再選擇任一時間段, 點擊導(dǎo)出按鈕, 即可以導(dǎo)出該時間段內(nèi)該設(shè)備的所有數(shù)據(jù), 并保存成文件, 為進一步的分析提供幫助。
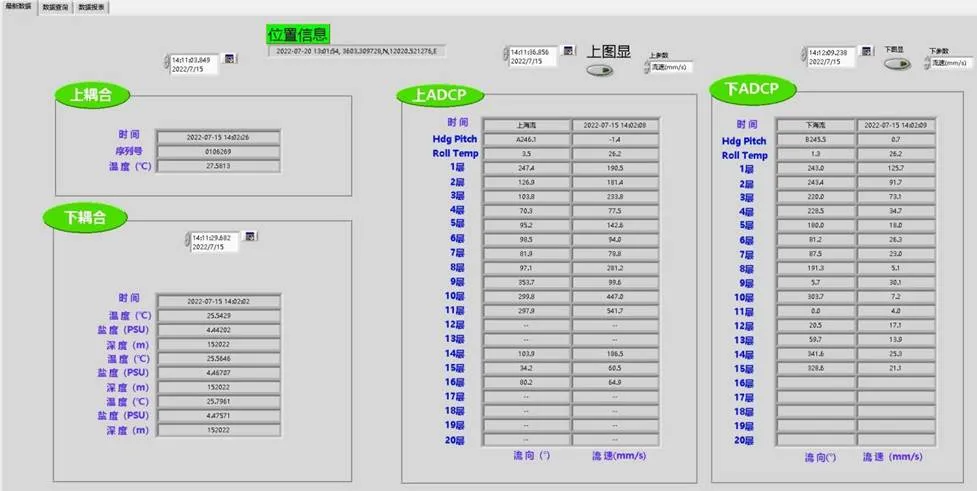
圖8 岸站接收系統(tǒng)客戶端的最新數(shù)據(jù)功能

圖9 岸站接收系統(tǒng)客戶端的數(shù)據(jù)查詢功能
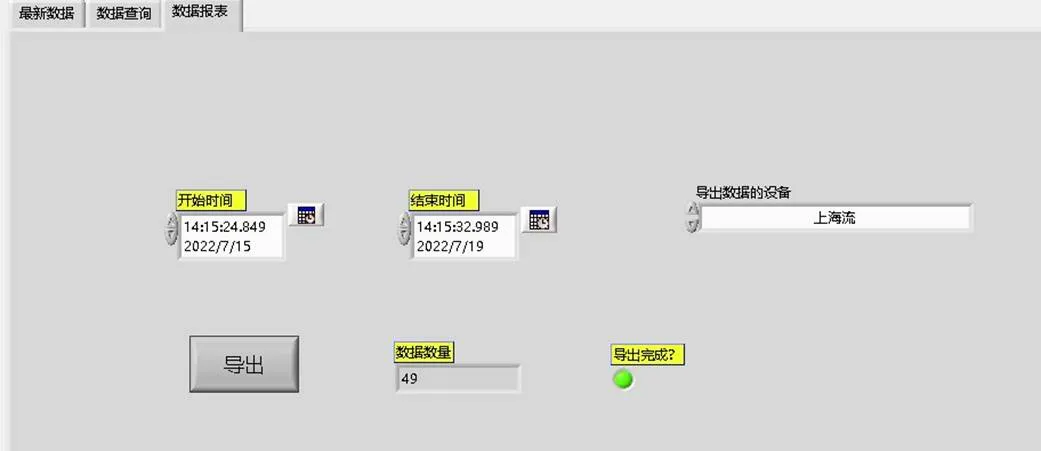
圖10 岸站接收系統(tǒng)客戶端的數(shù)據(jù)報表功能
3 系統(tǒng)測試
聲學(xué)多普勒流速剖面儀(ADCP)和溫鹽深儀(CTD)是最常使用的海洋調(diào)查儀器, 本文將搭載2套ADCP和4套CTD的實時海洋觀測系統(tǒng)進行測試。ADCP觀測流速和流向, 設(shè)置觀測層數(shù)是20層, 分為向上測量和向下測量, 1套ADCP的數(shù)據(jù)量最多是250個字節(jié), 1套CTD的數(shù)據(jù)量最多是60個字節(jié), 因此, 2套ADCP和4套CTD的總數(shù)據(jù)量最多是
250×2+60×4=740 Bytes, (1)
每張北斗短報文卡每次發(fā)送的有效數(shù)據(jù)量是74個字節(jié), 因此, 北斗多卡機理論上需要使用11張北斗短報文卡才可以滿足數(shù)據(jù)傳輸需求。由于海洋觀測數(shù)據(jù)中不同的觀測儀器采集頻率是不同的, 在解析數(shù)據(jù)的時候為了保持解析規(guī)則的統(tǒng)一性, 通常未觀測的數(shù)據(jù)補0以保證后面數(shù)據(jù)在正確的解析位置。使用哈夫曼壓縮算法, 補0后的數(shù)據(jù)不會增加數(shù)據(jù)長度, 減小了通訊數(shù)據(jù)長度。如圖11所示是使用哈夫曼壓縮算法實際測試的23 d左右的壓縮率, 測試過程中4臺觀測儀器是1次/h的觀測頻率, 1臺儀器是1次/2 h觀測頻率, 1臺儀器是12 h觀測1次, 可以明顯看到每12 h, 壓縮率會降低到40%以下, 每隔1個小時壓縮率會從54%左右降低到48%左右, 這是由于未觀測的儀器在數(shù)據(jù)位補0, 使用哈夫曼壓縮算法壓縮率增加。因此, 實際測試的過程中, 4~6張北斗卡就可以滿足測試需求。
如表3所示, 通過在岸上3個月的測試, 在相同數(shù)據(jù)只發(fā)送1次的情況下, 測試時長15 d, 數(shù)據(jù)的接收率為61.8%, 因此, 每次北斗接收數(shù)據(jù)的成功率為
=61.8%, (2)
由于一般令人滿意的數(shù)據(jù)接收率需要達到90%以上, 因此需要解(3)式中的值, 求得最小值為3, 因此, 理論上, 需要重復(fù)發(fā)送相同數(shù)據(jù)3次, 才可以達到令人滿意的接收率。
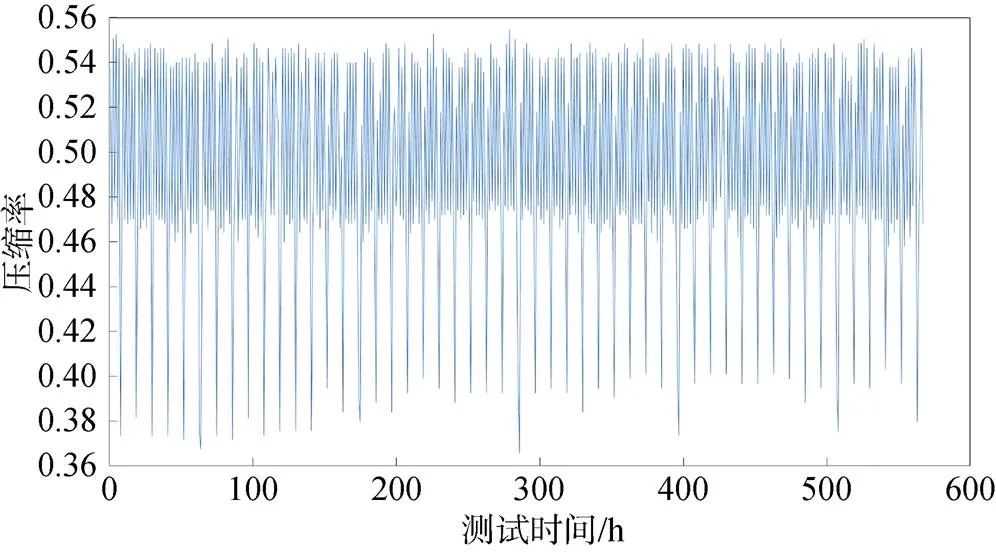
圖11 哈夫曼壓縮算法的壓縮率
(1–)≥90%, (3)
這里, 測試了相同數(shù)據(jù)重復(fù)發(fā)送2次和3次的情況。相同數(shù)據(jù)發(fā)送2次的情況下, 測試時長20 d, 數(shù)據(jù)的接收率為83.3%, 相同數(shù)據(jù)發(fā)送3次的情況下, 測試時長48 d, 數(shù)據(jù)的接收率為96.04%。可以看出, 基本每次北斗數(shù)據(jù)的接收都可以作為1個獨立的概率事件。因此, 在相同數(shù)據(jù)發(fā)送3次時, 可以達到令人滿意的接收率。圖12是海上測試的某一層的流速圖, 一共收到694條數(shù)據(jù), 應(yīng)該收到720條數(shù)據(jù), 數(shù)據(jù)接收率為96.4%, 與岸上測試結(jié)果基本一致。
4 結(jié)論
北斗短報文通訊沒有反饋信息, 通訊頻段與4G通訊頻段相近, 受到周圍環(huán)境的影響導(dǎo)致長時間的數(shù)據(jù)接收率在60%~70%左右。設(shè)計了一套基于北斗二代短報文的海洋觀測實時通信系統(tǒng), 北斗多卡機作為數(shù)據(jù)發(fā)送端, 觀測數(shù)據(jù)接收成功率達到96%以上, 滿足絕大多數(shù)觀測業(yè)務(wù)的需求。
基于北斗短報文的海洋觀測實時通信系統(tǒng)通過電子艙中的主控制器將觀測數(shù)據(jù)經(jīng)過哈夫曼壓縮算法壓縮后, 分包成適合北斗短報文發(fā)送的長度, 利用北斗多卡機將觀測數(shù)據(jù)發(fā)送到北斗衛(wèi)星, 北斗衛(wèi)星再發(fā)送到岸站接收系統(tǒng)的北斗終端上。岸站接收系統(tǒng)采用CS架構(gòu), 服務(wù)器端軟件將北斗終端接收的北斗短報文數(shù)據(jù)解壓縮后, 重新整合成觀測數(shù)據(jù), 客戶端軟件從服務(wù)器的數(shù)據(jù)庫申請數(shù)據(jù), 提供數(shù)據(jù)解析、存儲和顯示功能, 為進一步海洋科學(xué)分析和海洋預(yù)警提供幫助。經(jīng)過實際測試, 哈夫曼壓縮算法對海洋觀測數(shù)據(jù)的壓縮率在50%左右, 可以有效解決由于采樣頻率不一致導(dǎo)致的補0數(shù)據(jù)占通訊帶寬的問題。由于北斗衛(wèi)星屬于高軌衛(wèi)星, 有一定的掉包率, 根據(jù)理論分析和實際測試, 數(shù)據(jù)重復(fù)發(fā)送3次基本可以滿足海洋數(shù)據(jù)的接收需求, 數(shù)據(jù)接收成功率達到96%以上。本文提供了1套具有實用性的基于北斗短報文的海洋觀測的實時通信方案。
[1] 孔佑迪, 門雅彬, 齊占輝, 等. 基于銥星通信的海洋環(huán)境在線監(jiān)測系統(tǒng)[J]. 電子技術(shù)應(yīng)用, 2015, 41(8): 27-29, 33.KONG Youdi, MEN Yabin, QI Zhanhui, et al. The on-line monitoring system of marine environment based on iridium satellite communication[J].Application of Electronic Technique, 2015, 41(8): 27-29, 33.
[2] 王春曉, 王旭, 劉長華, 等. 一種用于海洋綜合觀測浮標的多種通信方式集成系統(tǒng)[J]. 海洋科學(xué), 2020, 44(1): 142-147. WANG Chunxiao, WANG Xu, LIU Changhua, et al. A multi-communication system used for an integrated marine observation buoy[J]. Marine Sciences, 2020, 44(1): 142-147.
[3] 汪嘉寧, 張祥光, 王凡. 基于單北斗模塊多卡數(shù)據(jù)傳輸方式的低功耗模組[P]. 中國專利: ZL201910421437.5, 2019-05-21.WANG Jianing, ZHANG Xiangguang, WANG Fan. Low power module based on single Beidou module and multi card data transmission method[P]. CN Patent: ZL201910421437.5, 2019-05-21.
[4] 賈爍, 李憲鵬, 張永輝. 基于北斗衛(wèi)星的海洋水文實時監(jiān)測系統(tǒng)[J]. 儀表技術(shù)與傳感器, 2018, 6: 109-117. JIA Shuo, LI Xianpeng, ZHANG Yonghui. Real-time marine hydrological monitoring system based on beidou satellite[J]. Instrument Technique and Sensor, 2018, 6: 109-117.
[5] 張茜, 張少永, 高超, 等. 基于北斗通信的海洋多要素觀測系統(tǒng)設(shè)計[J]. 海洋技術(shù)學(xué)報, 2019, 38(3): 28-33.ZHANG Qian, ZHANG Shaoyong, GAO Chao, et al. Design of a marine multi-elment observation system based on beidou communication[J]. Journal of Ocean Technology, 2019, 38(3): 28-33.
[6] 賈思洋, 劉長華, 王春曉, 等. 適用于中國近海觀測研究浮標的北斗/GPS雙模信標系統(tǒng)的研制與應(yīng)用[J]. 海洋科學(xué), 2022, 46(8): 137-145.JIA Siyang, LIU Changhua, WANG Chunxiao, et al. Research and application of the Beidou/GPS dual-mode beacon system for offshore marine observation and research buoys in China[J]. Marine Sciences, 2022, 46(8): 137-145.
[7] ZHANG Zhiteng, LI Bofeng, GAO Yang, et al. Asynchronous and time-differenced RTK for ocean applications using the BeiDou short message service[J]. Journal of Geodesy, 2023, 97(7): 1-14.
[8] 魏鵬, 李醒飛, 楊少波等. 嵌入式數(shù)據(jù)采集壓縮系統(tǒng)的設(shè)計[J]. 儀表技術(shù)與傳感器, 2020, 7(8): 122-126. WEI Peng, LI Xingfei, YANG Shaobo, et al. Design of embedded data acquisition and compression system[J]. Instrument Technique and Sensor, 2020, 7(8): 122-126.
Design and development of real-time communication system for ocean observation data based on Beidou short messages
JIANG Bin1, 2, 3, XUZhen-hua2, GE Zhen-ying4, YANG Shu-guo3, CHEN Yong-hua2
(1. College of Electromechanical and Engineering, Qingdao University of Science and Technology, Qingdao 266061, China; 2. Institute of Oceanology, Chinese Academy of Sciences, Qingdao 266071, China; 3. College of Mathematics and Physics, Qingdao University of Science and Technology, Qingdao 266061, China; 4. College of Physical Education, Qingdao University of Science and Technology, Qingdao 266061, China)
First- and second-generation Beidou short messages have a data length of only 78 bytes per communication, and the interval between successive communications is 300 s, which is insufficient for the real-time communication of ocean observations. A real-time communication system for ocean observation data based on Beidou short message is designed. The obtained data is sent through Beidou multicard machine by employing the Huffman compression algorithm to compress the observation data into multiple data packets. These subcontracted data are then transmitted through multiple Beidou cards, which are received by the shore station receiving system. Further, the received data package is decompressed and integrated into complete observation data. The Huffman compression algorithm is used to compress the observation data by about 50%. Moreover, each set of observation data is compressed and sent three times. After testing for three months on shore and one month at sea, the success rate of observation data reception was more than 96%. This verifies the feasibility and practicality of the real-time communication system for ocean observation based on Beidou short messages.
Linux; ocean survey; Beidou satellite; database; Huffman compression algorithm
May 8, 2023
[The Scientific and Technological Innovation Project Financially Supported by Laoshan Laboratory, No. LSKJ202202502; The National Natural Science Foundation of China, No. 92058202; The National Key Research and Development Program of China, No. 2022YFC3104102]
TN914-34; P715.2
A
1000-3096(2023)8-0068-07
10.11759/hykx20230508001
2023-05-08;
2023-06-27
嶗山實驗室科技創(chuàng)新項目(LSKJ202202502); 國家自然科學(xué)基金資助項目(92058202); 國家重點研發(fā)計劃資助項目(2022YFC3104102)
姜斌(1987—), 男, 山東煙臺人, 工程師, 博士, 主要從事海洋裝備研發(fā)與系統(tǒng)集成研究, E-mail: jiangbin@qdio.ac.cn; 陳永華(1976—),通信作者, 男, 山東棗莊人, 研究員, 主要從事海洋裝備研發(fā)與系統(tǒng)集成研究, E-mail: chenyonghua@qdio.ac.cn; 徐振華(1980—), 通信作者, 男, 山東青島人, 研究員, 主要從事海洋內(nèi)波與混合研究, E-mail: xuzhenhua@qdio.ac.cn
(本文編輯: 譚雪靜)
猜你喜歡
工業(yè)設(shè)計(2022年8期)2022-09-09 07:43:20
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(shù)(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
財經(jīng)(2017年15期)2017-07-03 22:40:49
財經(jīng)(2017年2期)2017-03-10 14:35:35
財經(jīng)(2016年15期)2016-06-03 07:38:02
財經(jīng)(2016年3期)2016-03-07 07:44:46