基于深度神經網絡的魚雷命中概率預測方法
2023-11-18 12:13:22李旭輝郭曉輝
水下無人系統學報 2023年5期
李旭輝,郭曉輝,程 帥,李 斌
(中國船舶集團有限公司 第705 研究所,陜西 西安,710077)
0 引言
在水下作戰指揮控制系統中,預測不同魚雷攻擊方式的命中概率能夠輔助指揮員快速、直觀地預估多種魚雷打擊方案的作戰效能,從而優化魚雷打擊方案,提高水面艦艇的水下作戰能力。
在水下作戰中,對魚雷的作戰效能評估通常使用解析計算法和仿真模擬法。武志東等[1]建立了直航魚雷、聲自導魚雷和尾流自導魚雷命中概率的解析計算通式,但對魚雷命中偏差的解算模型進行了線性化處理,且未考慮魚雷開機時機和魚雷再搜索,因此與仿真計算結果存在一定的誤差。丁光強[2]提出一種基于靜態命中概率表的火箭助飛魚雷命中概率實時評估模型,根據蒙特卡洛仿真方法計算出靜態命中概率表,將射擊誤差子區域的落入概率乘以每個射擊誤差子區域的平均命中概率,得到火箭助飛魚雷的實時命中概率。這種方法依賴于數字仿真模型的準確性,而火箭助飛魚雷在任意入水點的命中概率受到魚雷性能、水聲環境、目標規避機動假設等多種因素的影響。謝超等[3]采用基于蒙特卡洛方法對超空泡命中概率進行評估,通過仿真實驗分析了初始雷目距離、初始目標舷角和目標航速對命中概率的影響。吳寶奇等[4]建立了多級電磁線圈炮發射模型、本艦運動模型和來襲魚雷彈道模型等,采用Matlab 軟件對電磁發射反魚雷魚雷作戰的攔截概率進行了仿真及定量分析。袁富宇等[5]針對魚雷一次轉角射擊效果在線評估及射擊諸元實時優化計算的需要,基于誤差折算思想提出一種魚雷一次轉角射擊命中、發現概率的解析計算模型。
近幾年,隨著深度學習的廣泛應用,智能化作戰被廣泛提及。智能化作戰指揮是以人機協作為基本方式的腦機融合決策模式,智能算法為該模式的核心。智能化算法利用大數據,高效率地將海量數據轉化為作戰有用的情報,突破人類分析事物的局限性。在深度學習領域,魚雷作戰效能評估本質上是一個監督學習的分類問題。通過預先分配標簽的大樣本仿真數據訓練模型,將多維的戰場目標態勢輸入分類模型,分析預估魚雷是否能夠有效命中目標。解決監督學習分類問題的智能算法主要包括神經網絡、支持向量機、決策樹和貝葉斯方法等。杜毅等[6]提出了一種基于貝葉斯網絡的潛艇攻擊決策模型,簡化了模型的影響因素,構建了命中概率分析的貝葉斯網絡模型,實現了攻擊決策的推理分析。唐克等[7]探討了基于神經網絡的末敏彈命中概率預報模型的建模方法,利用matlab 軟件對影響末敏彈系統效能的因素進行了靈敏度仿真分析,為末敏彈系統效能研究提供了依據。
在此基礎上,文中結合了深度學習和魚雷作戰效能評估問題,基于構建的魚雷作戰數學仿真平臺大樣本,建立了基于深度神經網絡(deep neural network,DNN)的魚雷作戰效能評估模型,研究了模型對作戰效能評估和輔助決策方案的應用性;最后,通過實例驗證了模型的正確性和可信性。
1 DNN 預測模型
1.1 DNN
DNN 包含多層隱藏層,按不同層的位置可分為輸入層、隱藏層和輸出層。第1 層一般是輸入層,最后一層是輸出層,中間層數都是隱藏層。層與層之間全連接,即第i層任意1 個神經元一定與第i+1 層任意1 個神經元相連,如圖1 所示[8]。
圖1 深度神經網絡模型結構Fig.1 DNN model structure
1.2 DNN 預測模型
魚雷作戰效能評估模型分為如圖2 所示3 個部分。
圖2 DNN 預測模型Fig.2 DNN prediction model
模型的輸入為目標態勢與魚雷打擊方式,包括目標距離、目標方位、目標速度、目標航向、魚雷發射數量和魚雷射擊方法等6 個維度。在實際作戰中,由于水面艦艇傳感器存在一定的系統誤差,因此目標距離、方位、速度和航向都應為估計值。模型的輸出為魚雷的命中概率,通過輸出層分類器 Sigmoid函數將概率調整至(0,1)區間。Sigmoid函數表達式為
Sigmoid函數曲線見圖3,由圖可知x∈(-∞,+∞)而P(x)∈(0,1)。模型輸入輸出的狀態空間見表1。
表1 網絡輸入輸出的狀態空間Table 1 State space of network inputs and outputs
圖3 Sigmoid 函數圖像Fig.3 Sigmoid function graph
模型的核心為DNN。對于DNN 而言,較少的隱藏層層數訓練復雜度低但難以表達復雜的高維特征,學習能力差;較多的隱藏層層數可以提高網絡的學習能力,但也意味著更大的學習量。考慮到戰場環境復雜,命中概率預測問題沒有明顯的特征表達,因此將模型的隱藏層數設置為35 層。
DNN 的誤差損失函數選擇交叉熵損失函數
式中: “·”表示向量內積;W為權重;b為偏置;a為模型預測的概率值;y為真實的標簽值。
與均方誤差損失函數相比,交叉熵損失函數的梯度表達式 δL不包含 σ′(z),梯度為預測值和真實值之間的差距,這樣求得的Wl與bl也不包含 σ′(z),因此使用交叉熵損失函數能夠避免反向傳播收斂速度慢的問題,提高DNN 算法的訓練速度[9]。
DNN 的優化算法選擇Levenberg-Marquardt(L-M)方法。L-M 算法是一種利用標準的數值優化技術的快速算法,它結合了梯度下降法和高斯-牛頓法的優點,既具有梯度法的全局特性,又有高斯-牛頓法的局部收斂性[10]。L-M 算法的優化模型公式為
由于L-M 算法利用了近似的2 階導數信息,所以L-M 算法比梯度法快很多。
DNN 超參數設定如表2 所示。

表2 DNN 超參數設定Table 2 Hyper-parameter settings of DNN
2 實驗與驗證
2.1 樣本集
為了驗證模型的有效性,文中仿真了1 280 種不同態勢,具體態勢想定示意圖如圖4 所示。本艦以9 kn 的速度向正北方向航行,T時刻發現敵潛艇目標,目標距離3、5、7、9 km;方位角為30°、0°、90°、120°、150°;目標航速6、12、18、24 kn;目標航向為0°、90°、180°、-90°。在整個仿真過程中,敵潛艇目標運動狀態始終保持勻速直航,魚雷航速設定為50 kn,魚雷最大航程設定為15 km,魚雷發射方式包括現在點和有利提前角2 種。
圖4 作戰仿真態勢想定示意圖Fig.4 Desired situation of operation simulation
為了仿真真實作戰場景中本艦對敵潛艇目標的觀測誤差,同時泛化樣本數據,在仿真實驗中對目標距離增加2.5%×目標距離+50 m、對目標方位增加3.5°的高斯分布白噪聲。對每種增加高斯白噪聲的態勢仿真1 000 次,統計成功概率,用于對應此態勢的訓練、驗證或測試樣本的輸出,最終得到共計128 萬組樣本數據。為了初始訓練權重相同,樣本數據的多維數據保持均勻分布。為了測試模型的有效性,對樣本數據以0.6∶0.2∶0.2 的比例分割為訓練集、驗證集和測試集。部分訓練樣本數據如表3 所示。在仿真中,魚雷運動彈道依次為入水下潛彈道、直航搜索彈道和跟蹤導引彈道,直到與目標距離小于一定數值時視為命中目標。仿真的結果被認為是客觀的,可以用于作戰效能評估。
表3 部分訓練樣本數據Table 3 Partial training sample data
2.2 實驗結果分析
對訓練數據統一做歸一化處理后,通過528 輪的DNN 迭代訓練,訓練過程中訓練集、驗證集和測試集的誤差損失函數變化曲線如圖5 所示。由圖可發現,通過迭代次數的增加,訓練集、驗證集和測試集的誤差損失函數都呈現明顯的下降趨勢并且在200 步以后趨于穩定,522 步以后各數據集誤差損失函數不再明顯變化并趨于0.244 左右,證明網絡訓練效果優秀,不存在欠擬合和過擬合情況。
圖5 訓練過程誤差損失函數變化曲線Fig.5 Curves of error loss function during training
網絡訓練完成后對各數據集進行測試,圖6 和圖7 分別表示訓練集、驗證集、測試集及數據全集的混淆矩陣和接受者操作特征曲線(receiver operating characteristic curve,ROC)。由圖6 可發現,在包含高斯分布估計誤差的訓練集、驗證集、測試集及數據全集上的模型預測準確率統一達到了89.5%,進一步佐證了網絡的有效性。由圖7 可發現,在各數據集上的ROC曲線面積接近于1,說明模型的識別能力較強。
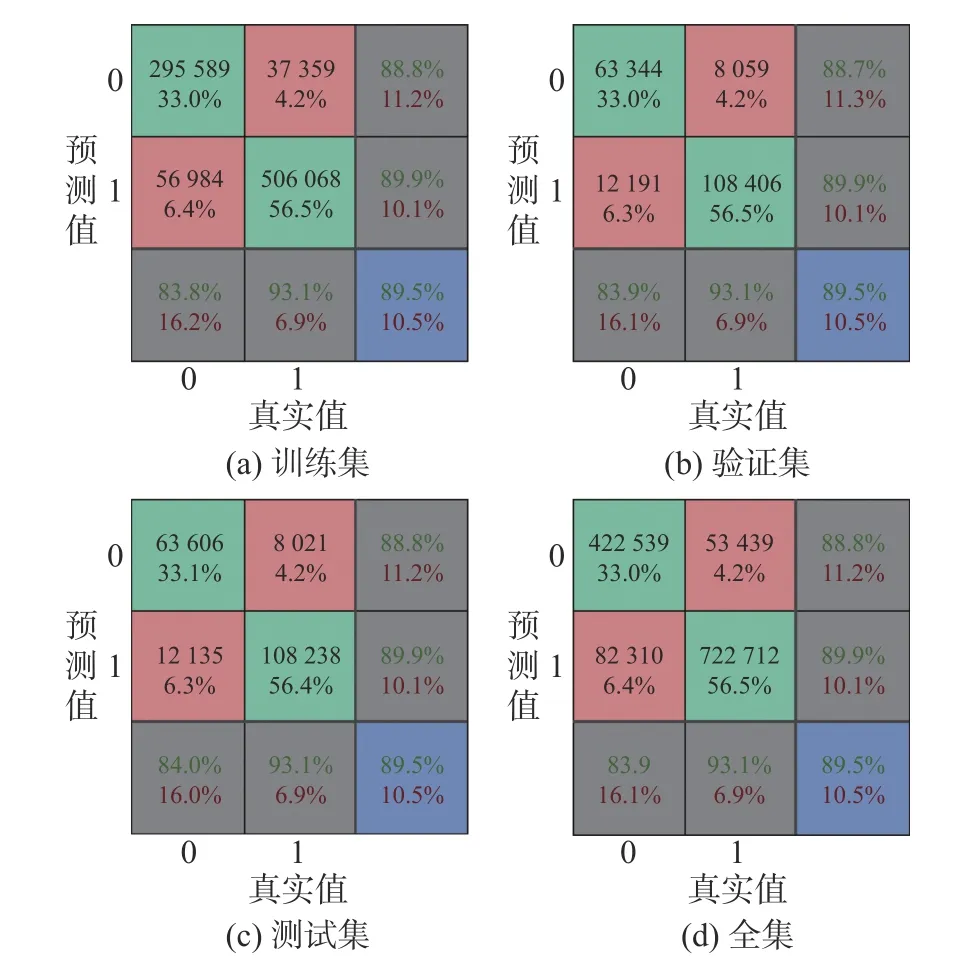
圖6 訓練集、驗證集、測試集及數據全集混淆矩陣Fig.6 Confusion matrix of training set,validation set,test set,and data set
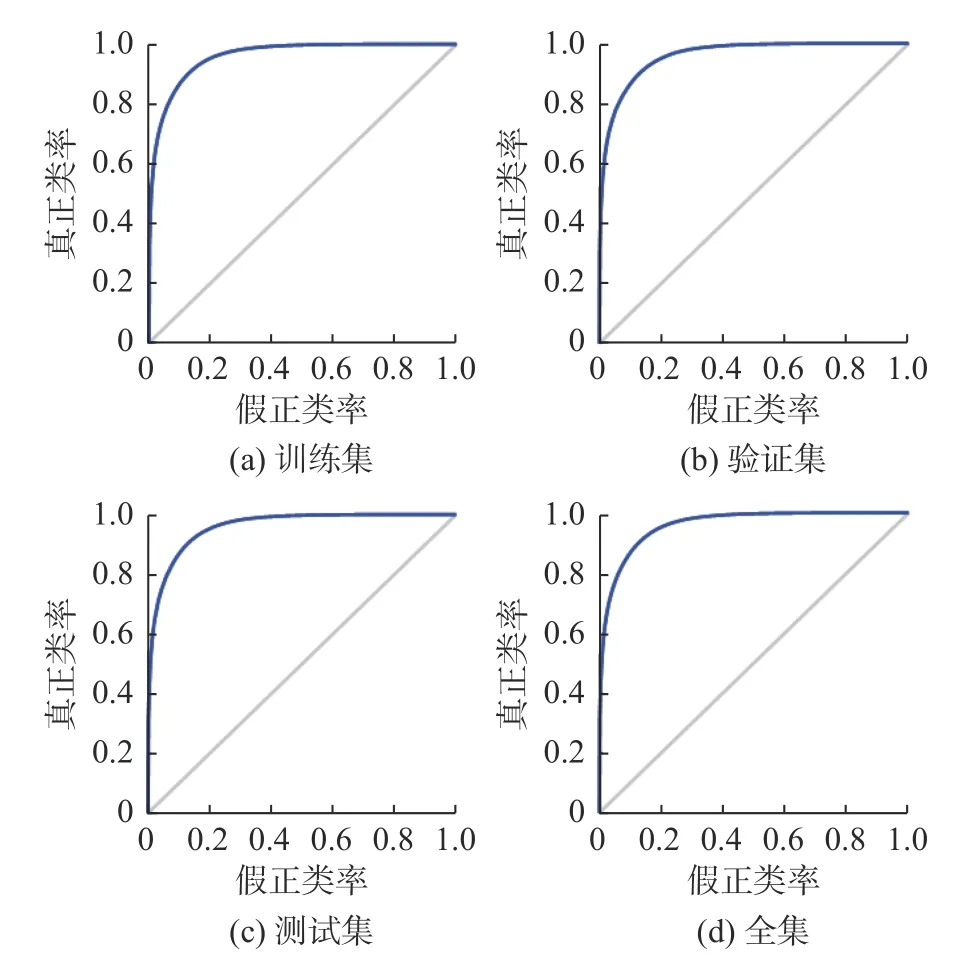
圖7 訓練集、驗證集、測試集及數據全集ROC 曲線Fig.7 ROC curves of training set,validation set,test set,and data set
2.3 各智能優化算法結果比較
為了驗證DNN 在模型準確率上的優越性,文中實現了其他幾種常見機器學習算法并統計了測試樣本的預測成功率,如表4 所示。
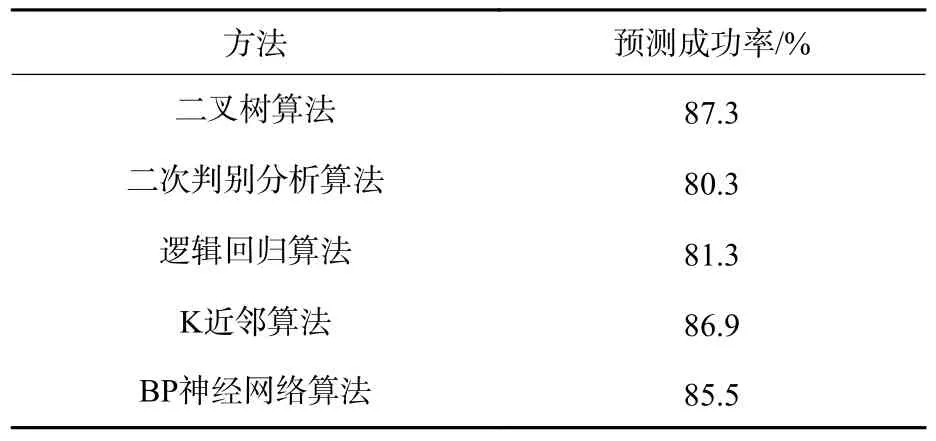
表4 其他機器學習方法統計結果Table 4 Statistical results of other machine learning methods
從表4 可以看出,其他幾種機器學習方法的預測成功率在80%~88%之間,相比之下,DNN 89.5%的預測成功率更為優秀。其中BP 神經網絡預測成功率達到85.5%,說明提高神經網絡深度對魚雷效能評估問題能有更好的特征表達。
3 模型應用
3.1 作戰效能預估
假設在T時刻本艦探測到敵潛目標,在T+1時刻對指揮員下發單雷現在點打擊方式的作戰方案對敵潛艇進行打擊。此時目標估計距離7 540 m、估計方位-0.6 rad、估計速度3.5 m/s、估計航向6.1 rad。
以上述方法訓練的DNN 預測模型對上述態勢場景進行效能預估,得到魚雷的命中概率為28.09%。指揮員可以根據此命中概率制定下一步作戰方案。
3.2 作戰方案優化
假設在T時刻本艦探測到敵潛艇目標,在T+1時刻艦長下令對敵潛艇進行打擊。此時目標估計距離7 540 m、估計方位-0.6 rad、估計速度3.5 m/s、估計航向6.1 rad。
以上述方法訓練的DNN 預測模型對上述態勢場景下的多種打擊方案進行預估,得到單雷現在點、雙雷現在點、單雷提前角以及雙雷提前角4 種打擊方式的魚雷命中概率依次為28.09%、53.89%、47.95%和79.08%。對水下作戰指揮員評估4 種打擊方案的魚雷命中概率后,優化目前作戰方案,選擇使用雙雷提前角方式打擊。
4 結束語
采用DNN 方法對魚雷的作戰效能進行智能評估,提高了水下作戰平臺的智能化水平,對水下指揮控制系統的智能化發展有著重大意義。
文中針對魚雷命中概率預測不準確、智能化水平低的問題,提出了基于DNN 的模型方法,并實驗驗證了該方法的可行性和有效性,但是提出的方法準確率仍存在一定的提升空間,如何提升預測魚雷命中概率的準確率,也是未來研究的主要目標。因為仿真方法是客觀的,若不考慮計算速度,就應選擇仿真方法,所以還應將上述方法與現場仿真方法的計算速度進行比較。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
兒童故事畫報(2019年5期)2019-05-26 14:26:14
光學精密工程(2016年6期)2016-11-07 09:07:19
Coco薇(2016年2期)2016-03-22 02:42:52
核科學與工程(2015年4期)2015-09-26 11:59:03
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長指南(2015年7期)2015-08-11 15:03:12
小雪花·成長指南(2015年4期)2015-05-19 14:47:56