一種空間碎片天基測量定位技術與參數優化
2023-11-13 07:21:08董召勇徐融郭海波
航天器工程 2023年5期
董召勇 徐融 郭海波
(上海衛星工程研究所,上海 201109)
隨著全球航天產業的飛速發展,由運載發射殘留物、失效或解體航天器及其殘骸等所組成的空間碎片的數量急劇上升,截至2023年8月美國通過地面監測編號的碎片數量約有19200個[1],對航天器在軌安全造成較大威脅,亟需加強對空間碎片的監測,盡早發現以便提前規避。
當前,針對空間碎片的監測手段以地基為主,但地基存在跟蹤弧段受限、時效性差等問題。利用天基觀測平臺,發揮“站得高,看得遠”的優勢,能夠突破地域限制,實現對空間碎片的全天時即時發現與跟蹤。
天基探測手段方面,總體以被動光學探測為主,輔以主動激光測距提升精度[2]。天基光學探測主要原理是通過光學傳感器獲取目標圖像,通過圖像檢測與目標提取處理得到目標像平面坐標,經過一系列坐標轉換后,計算出地心慣性坐標系下衛星指向目標的視線矢量[3]。當有兩顆以上衛星同時跟蹤目標時,通過多星視線交叉定位法[4]解算出目標位置。天基光學探測體制具備目標信息豐富、探測距離遠、成本相對低等特點,缺點是受太陽光、地氣背景輻射影響時,成像質量會下降。天基光學探測跟蹤系統以美國的地球同步空間態勢感知計劃(GSSAP)、國防支援計劃星座(DSP)、天基紅外系統(SBIRS)、空間跟蹤與監視系統(STSS)等為代表。天基激光測距以常用的脈沖激光測距雷達為例,主要原理是對目標發射一個或一列很窄的光脈沖(脈沖寬度小于50ns),測量自發射光脈沖起始,到達目標并由目標返回到接收機的時間,由此計算出目標距離[5]。脈沖激光測距雷達測量精度高,隨著衛星平臺跟蹤指向精度日益提升,在天基主動定位領域的應用前景將更加廣闊,缺點是探測距離短、瞬時波束窄。
針對空間碎片的在軌定位問題,一方面任務要求高時效性、高精度;另一方面星上可提供的計算資源是有限的,如何解決好兩者矛盾是問題關鍵。文獻[6]提出的天基無源方式空間目標定位跟蹤算法,重點解決了高軌衛星系統對空間目標的定位問題,但難以適用于低軌衛星跟蹤空間目標這種相對運動劇烈變化的情況;文獻[7]針對天基紅外低軌星座的任務特點,從收斂速度、估計精度、估計有效性以及運算效率等方面比較了批處理濾波、擴展卡爾曼濾波(EKF)、無跡卡爾曼濾波(UKF)、高階UKF和粒子濾波等算法的性能,分析表明:EKF具備最高的運算效率;文獻[8]提出一種應用多星的空間目標跟蹤定位算法,以多星異面交會算法求解目標位置,并采用最近鄰算法最優匹配關聯同一空間目標的星間像點,基于雙星交會模型解算空間目標軌跡進行空間目標跟蹤,算法可在軌實施,但應用范圍局限于天基光學探測;文獻[9]針對非合作目標相對導航中測量噪聲不確定的問題,提出了一種模糊迭代均方根容積卡爾曼濾波算法,實現相對狀態的測量,此算法仍主要基于天基測角數據,針對激光測距觀測數據的應用性能未作評估。上述文獻未考慮激光測距體制,難以適應星目相對高速運動的情況,且計算量大,不利于星上實施。
面向空間碎片的天基自主定位需求,本文提出了基于星目視線(LOS)和測距數據的空間碎片運動狀態擴展卡爾曼濾波估計方法,能夠適應天基光學探測和激光測距兩種探測體制,并結合典型場景對該方法的計算精度進行仿真驗證,最后通過開展多因子多水平正交試驗分析了測量數據精度、測量數據率和觀測距離等因素對目標定位結果的影響。
1 空間碎片運動狀態初值求解
開展空間碎片運動狀態實時估計的前提是獲取碎片的運動狀態初值,針對不同天基探測體制本文分別給出了對應的空間碎片目標運動狀態初值求解方法。
1.1 基于天基光學觀測的目標運動狀態初值求解
在光學測角體制下,目標定位通常采用視線交叉定位法[5],主要原理為:假設N顆衛星同時跟蹤目標,單次觀測即可獲取多個星目視線信息,從而聯立2N個方程,而目標三維位置未知數為3,當N≥2時,方程組數目將大于未知量數目,可以通過最小二乘法求解出目標三維位置。
1.2 基于天基激光測距的目標運動狀態初值求解
在脈沖激光測距中,以常用的脈沖激光測距雷達為例,通過計數器計數從光脈沖發射到目標,再從目標返回到接收機進入計數器的時鐘脈沖個數,測量出激光渡越時間t,激光在傳輸介質中的速度為c,由此計算出目標距離ρ=ct/2[10]。當存在4個以上激光測距傳感器在不同的空間位置對同一目標同時實施測距時[11],產生方程組
ρj=|sj-u|+ctu
(1)
式中:ρj為第j個激光雷達系統到目標的距離;sj為第j個天基激光測距傳感器在地心慣性坐標系下位置矢量;u為探測對象在地心慣性坐標系下的位置矢量;tu為傳感器信號處理的固定時延。

1.3 基于天基光學觀測和激光測距的目標運動狀態初值求解
在同時配置光學觀測傳感器和激光測距傳感器的情況下,理論上單顆衛星即可實現對探測對象的空間定位。根據衛星觀測獲得的目標視線單位矢量vI和星目距離ρ,可直接計算出目標在地心慣性坐標系中位置矢量ro
ro=rs+ρvI
(2)
式中:rs為探測衛星在地心慣性坐標系的位置矢量。
利用上述方法可求出兩個不同時刻的空間碎片位置初值,再相對時間間隔求差分即可得到空間碎片速度初值。
2 空間碎片運動狀態實時估計算法
以第1節求出的空間碎片位置速度為初值,以實時的多星觀測目標視線序列為量測輸入,目標動力學模型考慮二體動力學、地球引力場J2項攝動以及大氣阻力,通過擴展卡爾曼濾波實時輸出融合定位結果,從而實現對空間碎片運動位置和速度的實時估計。空間碎片運動狀態實時估計主要涉及量測模型建立、目標動力學建模、濾波估計算法和數值積分算法[13]。
2.1 動力學模型
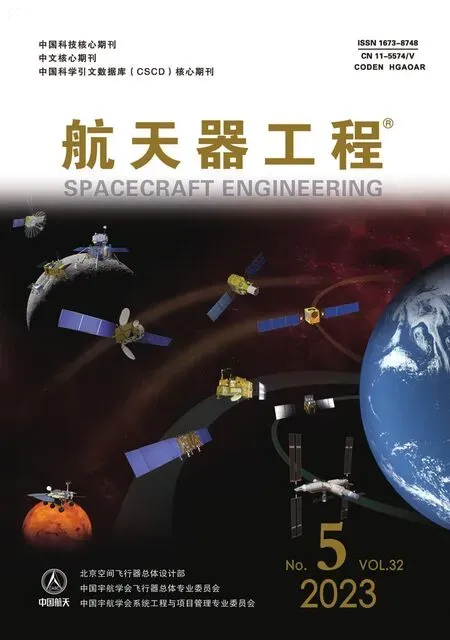
空間碎片飛行過程運動微分方程可描述為
(3)
式中:rtar為慣性系下目標相對地球質心的位置矢量;μ為地球引力常數;f為單位質量的攝動力。
空間碎片運動狀態為x(t)=(rtar(t),vtar(t))T,vtar為目標速度矢量,則目標運動狀態方程為
(4)
式中:atar為目標加速度矢量。
狀態轉移矩陣Φ(t,t0)=?x(t)/?x(t0),微分方程為
(5)

攝動力f選擇需綜合考慮星上計算資源。一般情況下,攝動力考慮地球引力場非中心力J2項攝動fNS和大氣阻力fDrag即可滿足工程需要[13]。
目標運動狀態初值為x(t0),狀態轉移矩陣初值取Φ(t0,t0)=I3×3,采用RK8(7)-13龍格-庫塔法[14]對微分方程進行數值積分,可遞推出任意時刻的目標運動狀態及對應的狀態轉移矩陣。
2.2 測量模型
設J2000坐標系下衛星的位置坐標為rsat=(xsat,ysat,zsat)T,目標的位置坐標為rtar=(xtar,ytar,ztar)T。

(6)
式中:rrel=rtar-rsat=[xrel,yrel,zrel]T,xrel,yrel,zrel為rrel的三維數值。
觀測量相對于運動狀態的偏導數,即雅克比矩陣G為
(7)
式中:ρ等于rrel的模。
若天基跟蹤系統采用激光測距體制,測量數據為衛星-目標之間的距離表達式為
ρ=‖rtar-rsat‖
(8)
觀測量相對于運動狀態的偏導數,即雅克比矩陣為
(9)
2.3 擴展卡爾曼濾波算法
擴展卡爾曼濾波算法由基礎卡爾曼濾波算法推導而來,基礎卡爾曼濾波要求參考狀態和估計狀態間的偏差足夠小,以便能夠忽略動力學和測量模型中所有的非線性項,而擴展卡爾曼濾波可克服此不足。擴展卡爾曼濾波分時間更新和測量更新兩步[15]。

(10)
設Wi為權重矩陣,Ki為卡爾曼增益,測量更新如下
(11)
濾波從初始狀態x0和初始協方差矩陣P0起步。初始狀態x0為t0時刻空間碎片運動狀態初值,初始協方差矩陣P0根據初始值的統計特性預估。
3 仿真算例
3.1 仿真場景設計
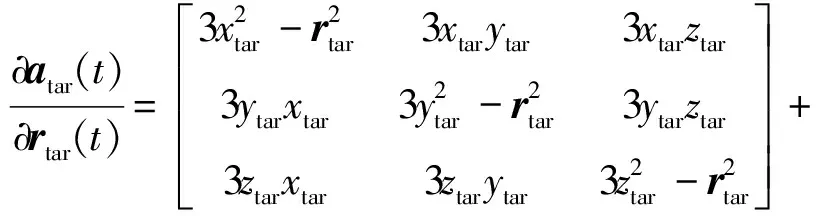
跟蹤衛星星座采用規模40顆的低軌衛星星座,衛星軌道高度1000km,傾角60°,星座采用Walker 40/4/1構型,每顆探測衛星搭載1臺光學探測載荷和1臺激光測距載荷,主要指標見表1。
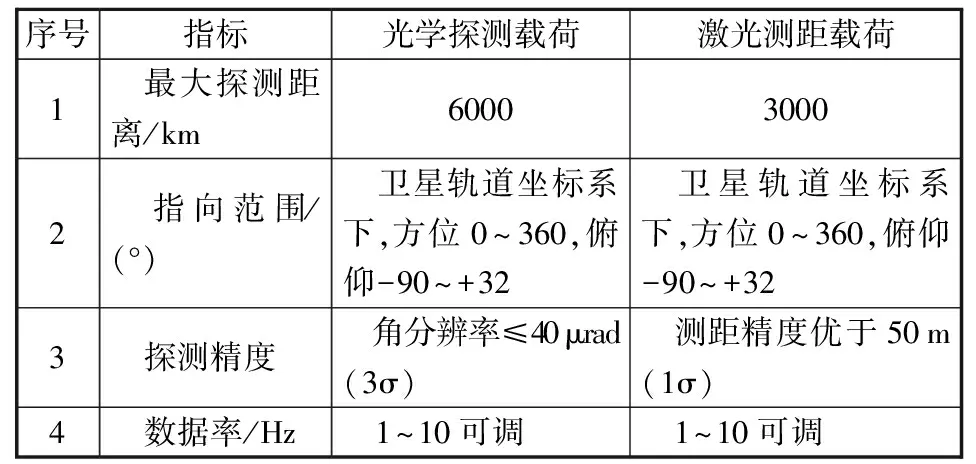
表1 跟蹤衛星載荷主要指標Table 1 Key performance of tracking satellite sensors
探測衛星平臺指向精度≤10μrad(3σ),本星的實時定位精度≤5m(三軸合成,1σ)、實時速度精度≤0.01m/s(三軸合成,1σ)。不考慮各個探測衛星間以及衛星內部不同探測載荷之間的時間同步誤差。
被跟蹤對象(空間碎片)運行于高度500km,軌道傾角30°的圓軌道。
根據跟蹤衛星星座對空間碎片的可見性分析結果,選擇包含同軌與異軌衛星在內的Sat-15、Sat-16、Sat-39三顆衛星作為探測平臺,對目標的觀測夾角及探測距離如圖1和圖2所示。
圖2 跟蹤星與空間碎片之間距離Fig.2 Distance between tracking satellites and debris
雙星對空間碎片的跟蹤夾角始終在45°~135°內,觀測幾何關系有利于進行視線交叉定位法;Sat-16和Sat-39對目標距離在激光測距在最大探測距離內,Sat-15對目標距離超出激光測距探測范圍,但在光學探測載荷最大探測距離內。
3.2 定位精度仿真
測量數據率取1Hz,采用擴展卡爾曼濾波估計算法,計算目標跟蹤定位精度如圖3所示。
圖3 目標定位精度仿真結果Fig.3 Simulation results of target positioning accuracy
基于同軌雙星光學測量數據,目標位置估計精度優于79.4m,速度估計精度優于3.5m/s,跟蹤精度收斂時間43s;基于異軌雙星光學測量數據,目標位置估計精度優于69.1m,目標速度估計精度優于3.7m/s,跟蹤精度收斂時間53s;基于單星光學測量加激光測距數據,目標位置估計精度優于124.3m,目標速度估計精度優于4.5m/s,跟蹤精度收斂時間22s。在表1載荷指標下,采用雙星光學測量模式的目標運動狀態估計精度優于單星光學測量加激光測距模式,但精度收斂時間比單星光學測量加激光測距模式多一倍。
4 空間碎片定位精度影響因素分析
通過開展不同水平的多因子正交試驗,分析各因子顯著性檢驗及影響趨勢,從而探求不同因素對目標定位精度的影響特性。針對雙星光學測量和單星光學測量加激光測距兩種模式,因子包括測量數據精度、測量數據率及觀測距離3個,因子及水平設置見表2(表2中測量數據精度可以通過光學角分辨率計算得出)和表3。目標定位精度指標為目標位置估計精度及速度估計精度,精度值越小越好。
表2 雙星光學測量試驗因子及水平Table 2 Experiment factors and levels using optical measurement data of two satellites
表3 單星光學測量加激光測距試驗因子及水平Table 3 Experiment factors and levels using optical measurement and laser ranging data of one single satellite
為便于行文,將采用雙星光學測量體制,以目標位置估計精度值為指標進行的正交試驗記為工況一,以目標速度估計精度值為指標進行的正交試驗記為工況二;將采用單星光學測量加激光測距體制,以目標位置估計精度值為指標的正交試驗記為工況三,以目標速度估計精度值為指標的正交試驗記為工況四。
4.1 正交試驗設計
下面重點圍繞工況一介紹正交試驗設計及數據分析過程,其他工況的研究過程類似。根據經驗3個試驗因子之間是相互獨立的,A、B是三因子水平,C是二因子水平,因此采用擬水平法,對正交表第三列進行改造(1、2→1,3→2),設計正交試驗表。每號試驗獲取4次數據,以目標位置估計精度值為指標,列表計算結果見表4[16]。
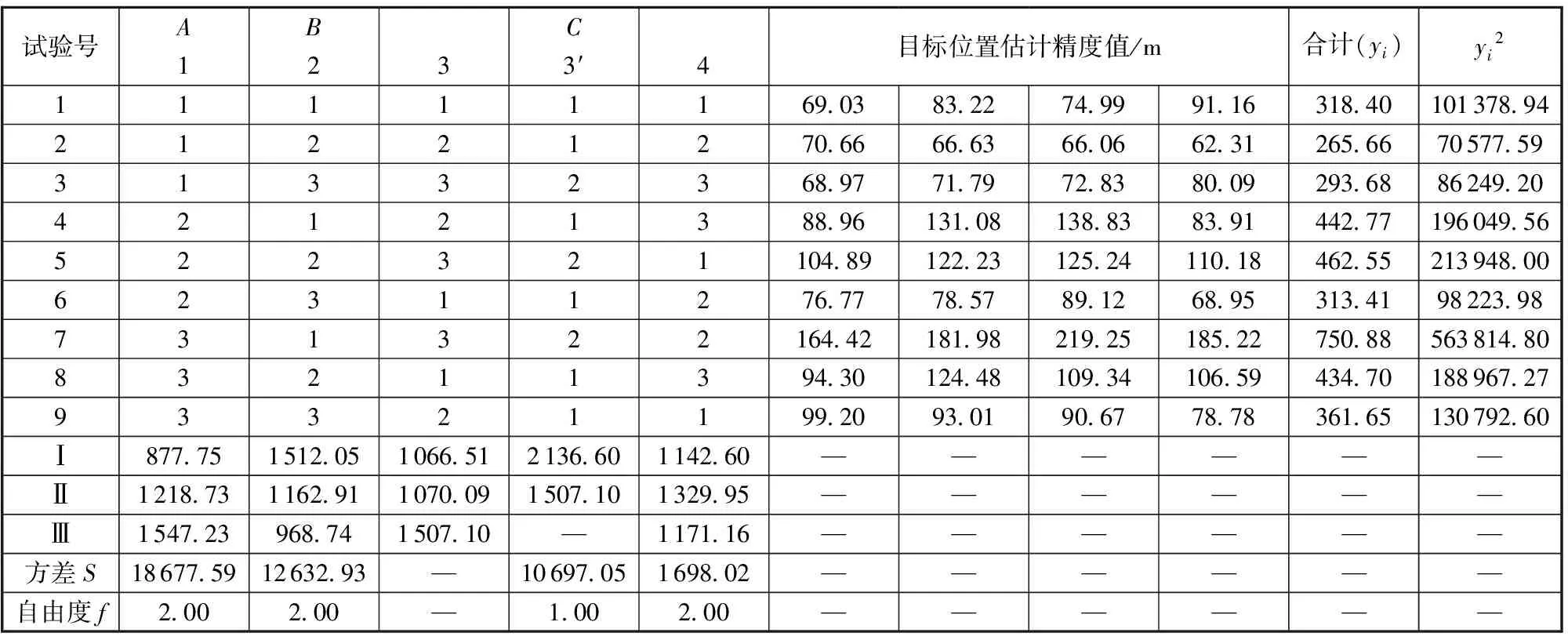
表4 正交試驗矩陣表(工況一)Table 4 Orthogonal experiment matrix table of first condition
4.2 顯著性檢驗
在計算各種平方和后,得到表5所示的方差分析表,用F檢驗準則對各因子間的交互作用顯著性進行檢驗。

表5 方差分析表(工況一)Table 5 Variance calculation table of first condition
分析表明:針對雙星光學測量模式,3個因子對目標位置估計精度值的影響都是顯著的。為了考察各因子對精度的影響特性,計算出3個因子在各水平的效應估計值見表6。
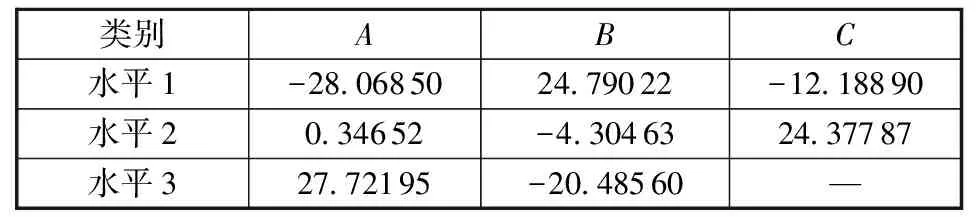
表6 效應估計值(工況一)Table 6 Effect estimation of first condition
目標位置估計精度值越小越好,因此效應估計值越小越好,結合表2試驗因子及水平和表6對應的效應估計值,得到如下結論:3個因子對目標位置估計精度值均有顯著影響,光學角分辨率越高、測量數據率越大、觀測距離越短,目標位置估計精度越高。
類似地,通過對正交表的擬水平設計,基于試驗數據的統計分析得到表7所示包含所有工況的方差分析表。
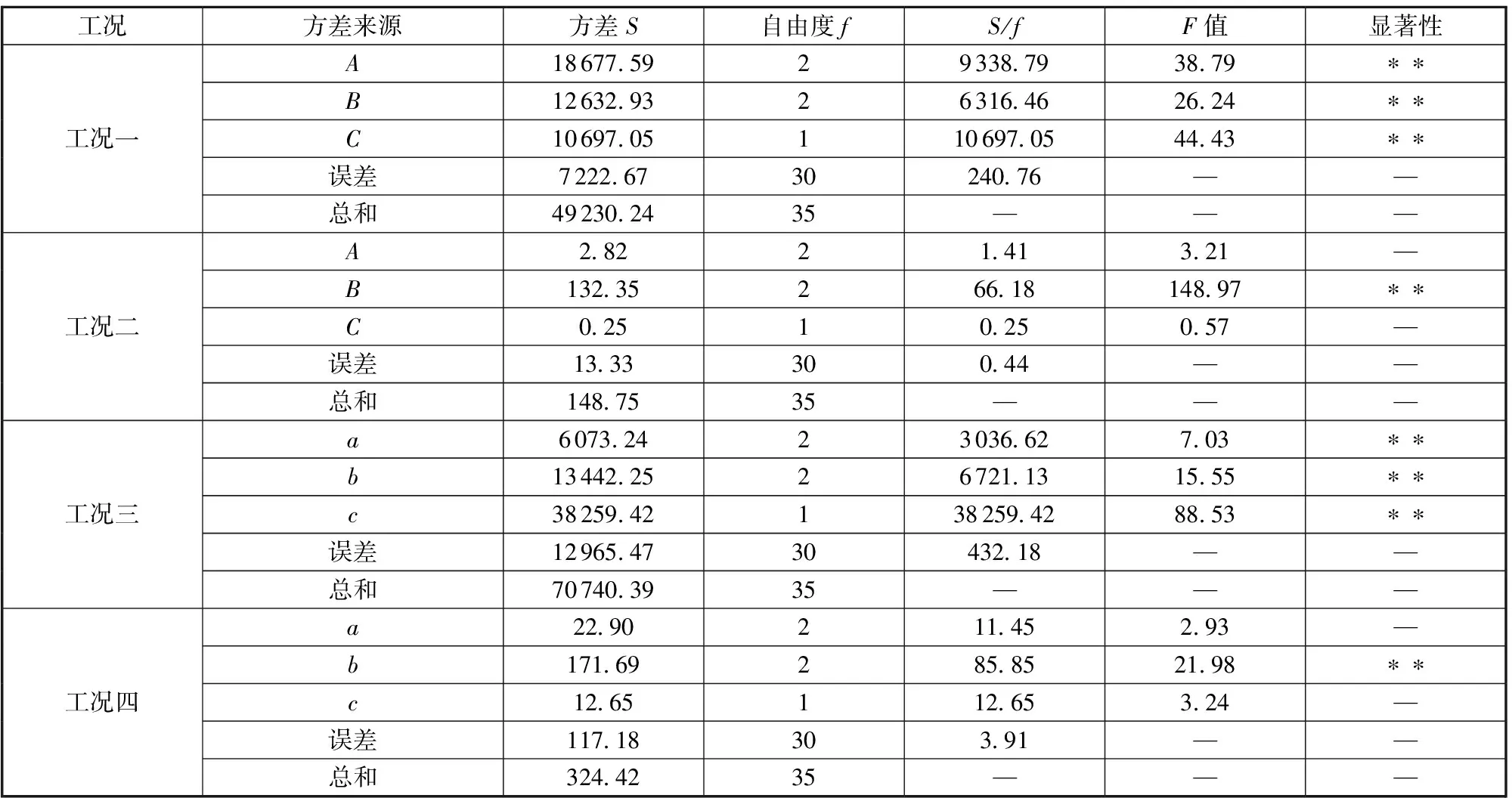
表7 所有工況方差分析表Table 7 Variance calculation table of all conditions
進一步計算出所有工況下具有顯著影響因子的效應估計值,見表8。
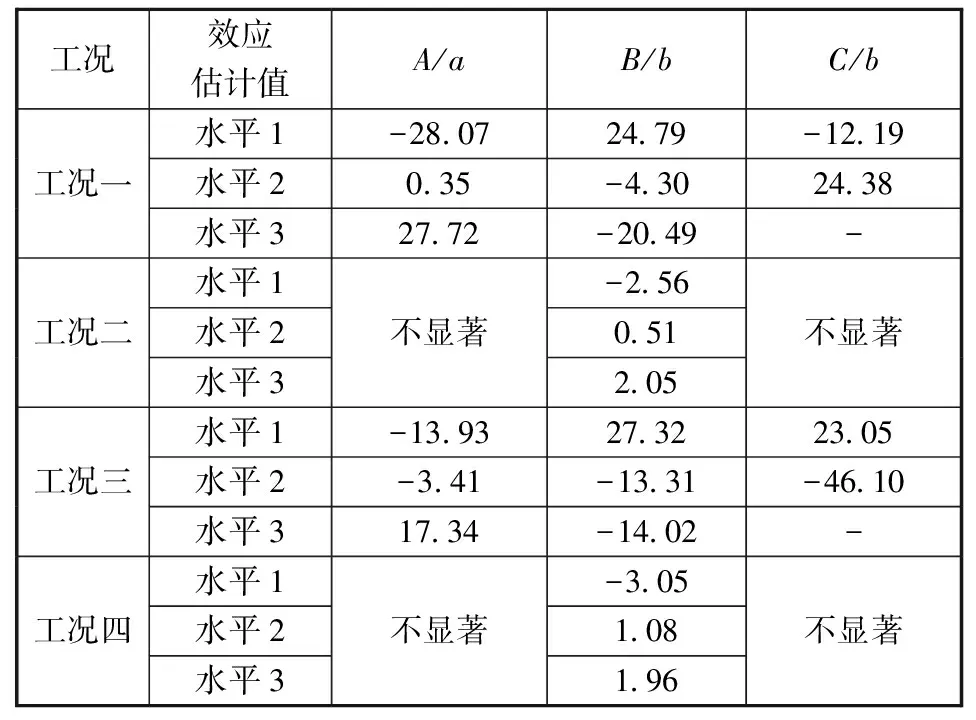
表8 所有工況效應估計值Table 8 Effect estimation of all conditions
4.3 各因子影響特性總結
目標位置估計和速度估計精度值都是越小越好,效應估計值應當越小越好。因此,針對目標位置估計精度的最優的水平選擇為A1B3C1(工況一),a1b3c2(工況三)。結合表2、表3的試驗因子及水平和表8的效應估計值,總結各因子對定位結果的影響特性如下。
(1)測量數據精度越高越好。考察工況一和工況三,當光學角分辨率或激光測距精度越高,對應的效應值越小,所得到的位置估計精度值越小,精度收斂時間也越短。
(2)測量數據率并非越高越好。盡管測量數據率越大,目標位置估計精度值越小、收斂時間也越短,但是考察工況二和工況四,發現測量數據率越大對目標速度估計精度值的影響是不顯著的。
(3)觀測距離越短越好。考察工況一和工況三,隨著觀測距離縮短,目標位置估計精度值越小,精度收斂時間也越短。
5 結束語
針對空間碎片的在軌監測,天基探測手段相對地基具有探測范圍廣、跟蹤時間長、響應速度快等優點。針對空間碎片天基定位需求,本文提出了基于天基光學探測、天基激光測距的空間碎片運動狀態估計算法,具有求解精度高、運行穩定性好和計算量低等優點,具備在軌應用的條件。通過研究各探測因素對跟蹤精度的影響,能夠支撐天基光學探測器和激光測距載荷指標論證,可為空間碎片天基跟蹤系統設計提供參考。
猜你喜歡
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
測控技術(2018年12期)2018-11-25 09:37:34
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
北京航空航天大學學報(2017年9期)2017-12-18 07:12:25
數學小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
少兒科學周刊·兒童版(2016年1期)2016-03-14 03:52:21
電源技術(2016年9期)2016-02-27 09:05:39
電源技術(2015年1期)2015-08-22 11:16:28
電測與儀表(2015年24期)2015-04-09 12:04:36