基于模糊控制的智慧城市路口交通燈配時(shí)優(yōu)化方法
2023-11-08 10:53:58傅正陽(yáng)鄭江萍
交通建設(shè)與管理 2023年5期
李 斌,傅正陽(yáng),鄭江萍
(杭州市公安局交通警察支隊(duì)西湖大隊(duì),浙江 杭州 310000)
0 引言
近年來(lái),隨著智慧城市的不斷發(fā)展,城市交通面臨的壓力逐漸增大,特別是在路況復(fù)雜的交通路口,容易因?yàn)榻煌襞鋾r(shí)標(biāo)準(zhǔn)不合理而出現(xiàn)擁堵現(xiàn)象。針對(duì)該問(wèn)題,陳海洋等[1]引入克隆選擇算法,對(duì)克隆抑制算子與種群刷新算子進(jìn)行改進(jìn),將交通燈狀態(tài)設(shè)置問(wèn)題轉(zhuǎn)換成克隆選擇算法搜索最優(yōu)解問(wèn)題,實(shí)現(xiàn)智慧城市路口交通燈配時(shí)優(yōu)化,但該方法在實(shí)際應(yīng)用中優(yōu)化效果不佳,路口仍出現(xiàn)擁堵問(wèn)題。陳小紅等[2]研究了不確定交通需求下的交叉口信號(hào)配時(shí)區(qū)間優(yōu)化模型,通過(guò)構(gòu)建信號(hào)配時(shí)參數(shù)區(qū)間非線性多目標(biāo)規(guī)劃模型,采用多層嵌套遺傳算法求解方式實(shí)現(xiàn)對(duì)交叉口信號(hào)配時(shí)區(qū)間的優(yōu)化,但該方法的控制效果也不理想。本文引入模糊控制理論,設(shè)計(jì)了一種新型的智慧城市路口交通燈配時(shí)優(yōu)化方法,切實(shí)提高了智慧城市路口交通燈配時(shí)優(yōu)化效果,緩解了交通路口的擁堵情況。
1 模糊控制方法
1.1 PID 控制器
PID 控制器的運(yùn)行是根據(jù)輸入信號(hào)的比例、積分以及微分關(guān)系,實(shí)現(xiàn)對(duì)目標(biāo)對(duì)象按需控制的目的。PID 控制器模塊可以使待控對(duì)象的被占用時(shí)長(zhǎng)趨于合理,與單純積分控制的應(yīng)用思想基本類似。在實(shí)現(xiàn)同等比例控制各個(gè)目標(biāo)對(duì)象的同時(shí),可以使下級(jí)設(shè)備保持自由運(yùn)行狀態(tài),對(duì)傳輸信號(hào)的控制作用相對(duì)較輕,當(dāng)信號(hào)樣本單次輸入量較大時(shí),PID 控制器的運(yùn)行速度會(huì)明顯下降。為了保證待控對(duì)象的運(yùn)行能力,在選擇信號(hào)樣本時(shí)應(yīng)控制目標(biāo)信號(hào)的單次輸出總量,PID 控制器結(jié)構(gòu)模型如圖1所示。
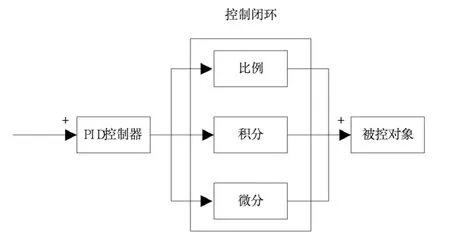
圖1 PID 控制器連接結(jié)構(gòu)
設(shè)α表示模糊性參數(shù),c表示信號(hào)分配特征(輛),該特征通過(guò)信息增益提取,表示待分配信號(hào)在單位時(shí)間內(nèi)的累積均值(輛/min),δ表示傳輸信號(hào)的實(shí)時(shí)系數(shù)(min),聯(lián)系上述物理量,可將PID 控制器的運(yùn)行表達(dá)式定義為:
式(1)中:W表示PID 控制器輸出。如果α>0 成立,表示信號(hào)傳輸方向與正負(fù)極標(biāo)記方向相同;如果α<0 成立,則表示信號(hào)傳輸方向與正負(fù)極標(biāo)記方向相反。
1.2 整定參數(shù)
由于PID 控制器的運(yùn)行會(huì)同時(shí)受到兩種信號(hào)源的影響,在規(guī)范路口交通燈配時(shí)標(biāo)準(zhǔn)時(shí),易出現(xiàn)信號(hào)傳輸行為混亂而造成控制效果不佳。為了避免上述情況的發(fā)生,可以根據(jù)PID 控制器元件的實(shí)時(shí)運(yùn)行特點(diǎn),求解整定參數(shù)并聯(lián)合相關(guān)物理參量,完善模糊控制方法的應(yīng)用流程[3]。整定參數(shù),是對(duì)參數(shù)指標(biāo)的整合與判定,前者意在將所有可能的物理參數(shù)聚合在一起,通過(guò)集中計(jì)算的方式選定最優(yōu)解結(jié)果;后者則是在所有可能最優(yōu)解中進(jìn)行持續(xù)搜索,在去除局部干擾項(xiàng)參數(shù)后,得到唯一全局的最優(yōu)解結(jié)果。在對(duì)路口交通燈配時(shí)優(yōu)化過(guò)程中,只有保證整定參數(shù)求解結(jié)果的唯一性,才能實(shí)現(xiàn)對(duì)信號(hào)燈響應(yīng)時(shí)長(zhǎng)的準(zhǔn)確分配,其整定參數(shù)的計(jì)算應(yīng)滿足如下表達(dá):
式(2)中:Y表示整定參數(shù)的唯一解,β表示所選信號(hào)參量的控制系數(shù),表示所選信號(hào)參量的模糊標(biāo)記指征(輛),α、σ表示兩個(gè)不相等的信號(hào)導(dǎo)入?yún)?shù),I表示實(shí)時(shí)整定向量(輛/min),γ表示方向性參數(shù),q1、q2、…、qn表示n個(gè)不同的數(shù)值解(min/輛)。為了充分發(fā)揮模糊控制方法的應(yīng)用能力,在對(duì)方向性參數(shù)進(jìn)行取值時(shí)應(yīng)盡量避免取得零值或與零接近的物理參數(shù)。
2 智慧城市路口交通燈配時(shí)策略優(yōu)化
在模糊控制方法基礎(chǔ)上確定路口的實(shí)時(shí)交通狀態(tài),選擇既定動(dòng)作指令并聯(lián)合獎(jiǎng)勵(lì)值函數(shù),求解優(yōu)化指數(shù)參量,實(shí)現(xiàn)對(duì)智慧城市路口交通燈配時(shí)策略的優(yōu)化。
2.1 交通狀態(tài)
智慧城市管理理念中,當(dāng)交通路口擁塞程度達(dá)到一定數(shù)值水平后,當(dāng)前路口便不具備再容納其他車(chē)輛通行的能力。模糊控制理論認(rèn)為,路口交通狀態(tài)會(huì)受到時(shí)間、季節(jié)、溫度等多項(xiàng)外界因素的影響,因此在制定交通燈配時(shí)策略時(shí),可以適當(dāng)調(diào)整信號(hào)燈的響應(yīng)時(shí)長(zhǎng)[4]。在優(yōu)化交通燈配時(shí)策略時(shí),交通狀態(tài)只能作為一項(xiàng)參考變量。設(shè)表示擁塞參數(shù),lmax表示交通燈配時(shí)參數(shù)的最大取值結(jié)果(s),lmin表示交通燈配時(shí)參數(shù)的最小取值結(jié)果(s),kmax表示單位時(shí)間內(nèi)的最大車(chē)輛容納數(shù)值(輛/min),kmin表示單位時(shí)間內(nèi)的最小車(chē)輛容納數(shù)值(輛/min)。在上述物理量的支持下,聯(lián)合式(2),可將智慧城市路口的交通狀態(tài)求解表達(dá)式定義為式(3):
式(3)中:P表示智慧城市路口的交通狀態(tài)。如果交通狀態(tài)求解結(jié)果始終無(wú)法滿足路口交通燈的配時(shí)要求,可能是擁塞系數(shù)的選值結(jié)果出了偏差,應(yīng)在不更改車(chē)輛容納數(shù)值與交通燈配時(shí)參數(shù)情況下對(duì)原擁塞系數(shù)進(jìn)行調(diào)整。
2.2 交通燈顯示狀態(tài)選擇
交通燈顯示狀態(tài)選擇是指對(duì)交通燈的配時(shí)響應(yīng)進(jìn)行控制,即控制交通燈顯示的狀態(tài),該狀態(tài)分為紅燈、綠燈和黃燈三種狀態(tài),分別對(duì)應(yīng)車(chē)輛的停止動(dòng)作、行進(jìn)動(dòng)作和轉(zhuǎn)換動(dòng)作(黃燈持續(xù)閃爍時(shí),車(chē)輛在確認(rèn)安全后可通行)。當(dāng)車(chē)輛通行總和達(dá)到最大值時(shí),交通燈的信號(hào)響應(yīng)時(shí)長(zhǎng)也達(dá)到最大值,在不考慮其他干擾情況下對(duì)交通燈顯示狀態(tài)進(jìn)行選擇,即配時(shí)響應(yīng)的控制應(yīng)注意以下問(wèn)題:
(1)停止動(dòng)作:在交通情況相對(duì)復(fù)雜的前提下,同一方向上需要通行的車(chē)輛相對(duì)較多,若紅燈響應(yīng)時(shí)間過(guò)長(zhǎng),容易導(dǎo)致嚴(yán)重的交通堵塞。為緩解城市路口的交通壓力,停止動(dòng)作在總配時(shí)中的占比時(shí)長(zhǎng)一般相對(duì)較短。
(2)行進(jìn)動(dòng)作:在大多數(shù)城市路口的主要通行方向上,綠燈的響應(yīng)時(shí)間都要大于紅燈;而綠燈響應(yīng)時(shí)間對(duì)應(yīng)交通燈配時(shí)策略中的行進(jìn)動(dòng)作。為緩解城市路口的交通壓力,行進(jìn)動(dòng)作在總配時(shí)中的占比時(shí)間必須大于停止動(dòng)作。
(3)轉(zhuǎn)換動(dòng)作:連接停止動(dòng)作與行進(jìn)動(dòng)作的交通燈表現(xiàn)形態(tài)被稱為轉(zhuǎn)換動(dòng)作,也就是黃燈。在特殊路口處,黃燈如果持續(xù)閃爍,表示車(chē)輛在確認(rèn)安全后可直接通過(guò)。因此,相較于停止動(dòng)作與行進(jìn)動(dòng)作,轉(zhuǎn)換動(dòng)作在交通燈總配時(shí)中的占比時(shí)長(zhǎng)并不完全固定。
2.3 獎(jiǎng)勵(lì)函數(shù)
獎(jiǎng)勵(lì)函數(shù)是分別計(jì)算車(chē)輛在智慧城市路網(wǎng)中各個(gè)路口的行進(jìn)效率,根據(jù)模糊控制策略求解獎(jiǎng)勵(lì)函數(shù)表達(dá)式,對(duì)于效率的求解主要參考車(chē)輛通過(guò)路口所需的時(shí)間。在車(chē)流量保持均勻分布的情況下,只要控制車(chē)輛在各個(gè)路口的等待時(shí)長(zhǎng),就能避免車(chē)輛在城市路網(wǎng)中大量擁堵,從而實(shí)現(xiàn)對(duì)交通燈配時(shí)的優(yōu)化處理。設(shè)表示車(chē)輛通行效率,表示實(shí)時(shí)車(chē)流量(輛/min),表示車(chē)輛在各個(gè)路口處的停留時(shí)間均值(s),ΔK表示車(chē)輛在單位時(shí)間內(nèi)所通過(guò)的路口總量(輛),λ表示智慧城市路網(wǎng)中的路口分布系數(shù)。在上述物理量的支持下,聯(lián)合式(3)推導(dǎo)基于模糊控制的獎(jiǎng)勵(lì)函數(shù)表達(dá)式(4)如下:
式(4)中:F表示獎(jiǎng)勵(lì)函數(shù)計(jì)算結(jié)果,用于評(píng)估車(chē)輛在智慧城市路網(wǎng)中行進(jìn)效率。為了使交通燈配時(shí)優(yōu)化結(jié)果更加貼合實(shí)際需求,要求ΔK指標(biāo)的取值不宜過(guò)小,所以在運(yùn)算需求上應(yīng)盡量延長(zhǎng)車(chē)輛在智慧城市路網(wǎng)中的單位行駛時(shí)長(zhǎng)。
2.4 優(yōu)化指數(shù)
為了規(guī)范交通燈配時(shí)標(biāo)準(zhǔn),要按照獎(jiǎng)勵(lì)函數(shù)的計(jì)算結(jié)果,分別對(duì)紅、綠信號(hào)燈的響應(yīng)時(shí)長(zhǎng)進(jìn)行控制調(diào)節(jié)。規(guī)定b'表示綠燈信號(hào)調(diào)節(jié)參數(shù),μ表示紅燈信號(hào)調(diào)節(jié)參數(shù),Μ表示交通燈轉(zhuǎn)換向量,聯(lián)合式(4),可將優(yōu)化指數(shù)定義式表示為:
式(5)中:v表示優(yōu)化指數(shù),如果v計(jì)算結(jié)果等于“1”,表示在當(dāng)前情況下的紅燈、綠燈響應(yīng)時(shí)間能夠滿足城市路口的通行需求,交通燈的響應(yīng)時(shí)長(zhǎng)也達(dá)到了最佳配時(shí)狀態(tài)。
3 實(shí)例分析
基于模糊控制的路口交通燈配時(shí)優(yōu)化方法,應(yīng)以不確定交通需求下的配時(shí)優(yōu)化模型作為實(shí)驗(yàn)組和對(duì)照組,設(shè)計(jì)如下對(duì)比實(shí)驗(yàn)分析。首先,模擬智慧城市路網(wǎng)晚高峰時(shí)期的路口交通情況,再分別按照實(shí)驗(yàn)組、對(duì)照組方法對(duì)該路口的交通燈配時(shí)進(jìn)行調(diào)節(jié),最后記錄5 組不同的實(shí)驗(yàn)結(jié)果并將所得數(shù)值與交通燈理想配時(shí)情況進(jìn)行對(duì)比,其城市路口路網(wǎng)信息數(shù)據(jù)如表1 所示。
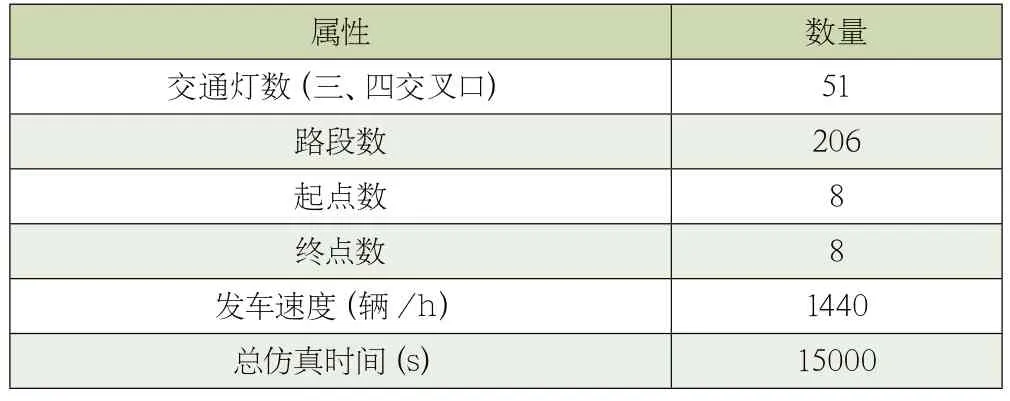
表1 路口路網(wǎng)信息數(shù)據(jù)表
表2 數(shù)據(jù)記錄了實(shí)驗(yàn)組、對(duì)照組與理想情況下的交通燈配時(shí)情況。

表2 交通燈配時(shí)數(shù)據(jù)表
分析表1 可知,與理想數(shù)值相比,實(shí)驗(yàn)組紅燈配時(shí)均值縮短了1s,綠燈配時(shí)均值延長(zhǎng)了1s。由于數(shù)值較小,其對(duì)于交通燈配時(shí)策略的影響程度可以忽略不計(jì);而對(duì)照組紅燈配時(shí)均值與理想數(shù)值相比延長(zhǎng)了2s,綠燈配時(shí)均值縮短了5s,差值水平遠(yuǎn)高于實(shí)驗(yàn)組。綜上可知,基于模糊控制的優(yōu)化方法更符合規(guī)范交通燈配時(shí)標(biāo)準(zhǔn)和緩解優(yōu)化智慧城市交通壓力的實(shí)際需求,對(duì)當(dāng)前城市路口的車(chē)輛密度推理得到表3 所示的車(chē)輛密度優(yōu)化結(jié)果。

表3 車(chē)輛密度優(yōu)化結(jié)果
表3 中的車(chē)輛密度由小到大排序?yàn)檩^小>小>適中>較大>大。根據(jù)表3 優(yōu)化結(jié)果可知,應(yīng)用本文方法后,當(dāng)前城市路口車(chē)輛密度均得到了一定程度的降低。如果車(chē)輛密度為大時(shí),無(wú)論是當(dāng)前路口還是協(xié)同交叉口的車(chē)輛密度均降為較大,即車(chē)輛密度降低,避免了出現(xiàn)交通擁堵。
4 結(jié)語(yǔ)
通過(guò)實(shí)例結(jié)果分析,相比不確定交通需求下的配時(shí)優(yōu)化模型,模糊控制交通燈配時(shí)優(yōu)化方法聯(lián)合了獎(jiǎng)勵(lì)值函數(shù)表達(dá)式,確定出優(yōu)化指數(shù)的取值范圍,實(shí)現(xiàn)了對(duì)擁堵路口的交通燈配時(shí)優(yōu)化。隨著這種新型優(yōu)化方法的應(yīng)用,城市路口的紅燈、綠燈配時(shí)均值都不會(huì)與理想配時(shí)標(biāo)準(zhǔn)產(chǎn)生過(guò)大出入,表明其在有效緩解智慧城市路口交通壓力上具有較高可行性和實(shí)用性。
猜你喜歡
房地產(chǎn)導(dǎo)刊(2022年5期)2022-06-01 06:20:14
建材發(fā)展導(dǎo)向(2021年12期)2021-07-22 08:06:48
建材發(fā)展導(dǎo)向(2021年7期)2021-07-16 07:07:52
中學(xué)生數(shù)理化(高中版.高二數(shù)學(xué))(2021年12期)2021-04-26 07:43:48
小學(xué)生作文(低年級(jí)適用)(2018年3期)2018-04-17 00:58:35
少年博覽·小學(xué)低年級(jí)(2017年4期)2017-06-09 16:22:28
作文評(píng)點(diǎn)報(bào)·低幼版(2017年7期)2017-03-11 20:49:41
少兒科學(xué)周刊·少年版(2015年4期)2015-07-07 20:56:37
小天使·一年級(jí)語(yǔ)數(shù)英綜合(2014年6期)2014-07-22 23:32:38
智慧與創(chuàng)想(2013年7期)2013-11-18 08:06:04