基于測距傳感器的汽車右轉輔助系統設計
2023-11-08 07:01:04胡慶輝孫清巍陳元勇王于娟
汽車實用技術 2023年20期
關鍵詞:汽車
胡慶輝,孫清巍,陳元勇,王于娟,高 揚
基于測距傳感器的汽車右轉輔助系統設計
胡慶輝,孫清巍,陳元勇*,王于娟,高 揚
(泰山職業技術學院,山東 泰安 271000)
為解決汽車右轉過程中,右側非機動車道視野不足的問題,文章提出在汽車前部安裝測距傳感器的方案加以解決。當右轉向燈開啟,或方向盤右轉超過限定角度時,傳感器開始工作,測量右側行人相對汽車位置、前進速度、前進方向,并與汽車運行軌跡比對,計算出可能的碰撞時間及碰撞點,反映到中控屏上,以提醒駕駛員進行相關操作。經過研究發現汽車右轉向20°/40°時,容易對非機動車道產生誤判,本系統通過圖像和聲音對駕駛員進行提醒,避免交通事故。
右轉輔助系統;測距傳感器;碰撞點;碰撞時間
隨著國內城市化進程加速,汽車的保有量越來越大,而電動自行車具有續航里程長、體積小,形式靈活等特點,尤其在上下班高峰期,其通勤時間比汽車更有優勢。然而由于汽車、電動自行車特點及道路建設等問題,汽車與電動自行車之間的交通事故數量一直居高不下,2021年中國非機動車交通事故發生數量為29 969起,同比上升3.2%[1]。因為電動自行車結構簡單且防護較差,每年因交通事故導致的死亡人數中,汽車、摩托車等機動車輛導致死亡人數均有下降,唯有非機動車輛造成的死亡和受傷人數同比上升[1]。尤其是在汽車右轉過程中,與右側直行電動自行車發生碰撞的概率明顯高于其他情形,其主要原因是在汽車右轉過程中,視野不充分,無法判斷電動自行車的運動狀態,尤其是在機動車與非機動車道間存在綠化帶時,此問題更加突出。
針對以上問題,文章以測距傳感器為主要工作元件,在車輛右轉開始時對車輛右側行人及非機動車運行狀態進行數據采集,并與機動車運行參數進行比對,計算出可能的碰撞時間及碰撞點,提醒駕駛員控制車輛行駛狀態,以達到避免交通事故的目的。
近年新能源汽車發展迅速,自動駕駛技術方興未艾。關于汽車輔助駕駛系統的研究較多,其中吉林大學楊碩[2]進行了線控汽車制動換道系統研究;湖南大學曾瑋攀[3]進行了轉向輔助系統控制研究;邊寧等[4]進行了半自動駕駛輔助系統研究,但是本文提出的輔助系統更注重擁擠道路下右轉低速大轉角時的行車安全,其傳感器探測距離更長,且監測對象更具有針對性,同時可以作為擁擠道路下汽車駕駛的重要輔助系統。
1 汽車右轉視野變化過程
在汽車行車過程中,充足的視野是保證行車安全的必要條件。對于大部分車輛來講,前行視野得以充足保障,但車輛兩側及后方視野需要借助后視鏡來完成,其可以保證駕駛員在座位上直接獲取汽車后方、側方和下方等外部視野,保證行車安全可靠。然而由于結構限制,后視鏡視野不可能完全覆蓋車身周邊,看不到的地方為視野盲區。對一般家庭乘用車而言,右側視野盲區(見圖1),主要包括左右A柱盲區以及左右后視鏡與B柱復合盲區。本研究只關注右側盲區在車輛右轉過程中問題。
圖1的汽車在最右側車道行駛,車道寬度為2.5 m,其中C車道為非機動車道(或綠化帶),寬度為2 m,D車道為有綠化帶情況下的非機動車道,寬度為2 m。車輛右側盲區分別為A柱盲區和B柱與后視鏡盲區,其中A柱盲區在車輛右轉過程中,造成影響較小,本文主要研究B柱與后視鏡盲區在車輛右轉過程中所造成的影響。一般小汽車的最小轉彎半徑為6 m,但右轉過程中,大部分情況不會用到最小轉彎半徑,以常用轉彎半徑10 m為例進行研究。B柱與后視鏡盲區并不是完全看不到,但是需要駕駛員大角度扭頭,在這種情況下,如果后排有乘客,通過后排車窗看到的視野很難保證,而且忽略了前進視野,很容易造成交通事故。同時大多數駕駛員并沒有右轉向后扭頭看車況的習慣,因此,可以理解為完全盲區。A柱盲區和B柱與后視鏡盲區之間的視野理論上也不能充足保證,因為副駕一旦有乘客,會影響通過車窗觀察車況的視野,本研究中理解為完全視野。而實際情況下,能完全保證的只有后視鏡視野。
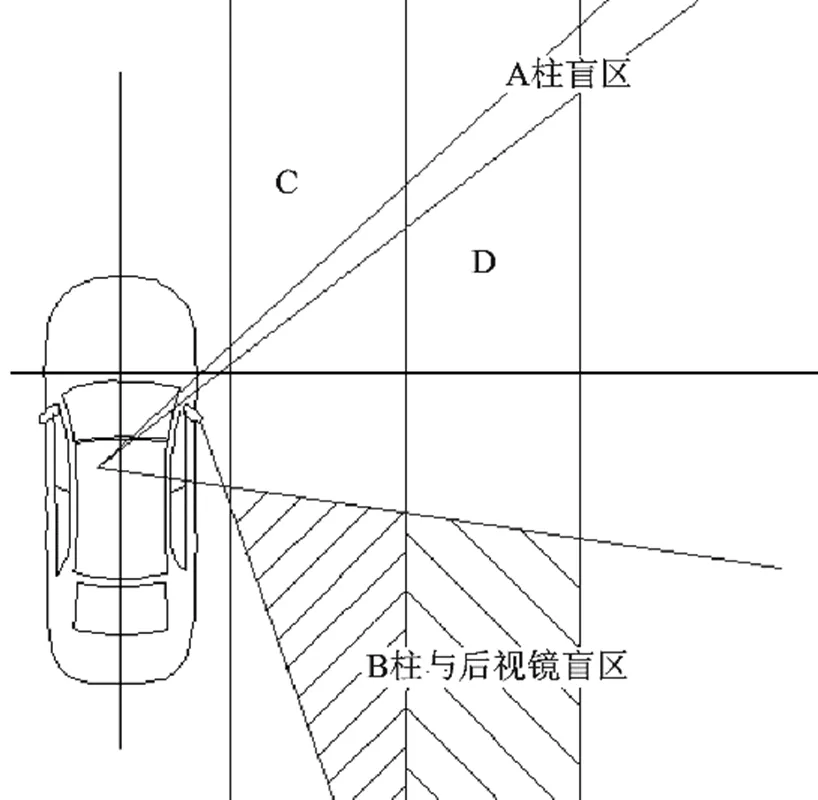
注:填充線區域為本研究的視野盲區。
為研究右轉向過程中視野盲區與非機動車道關系,現在圖1數據的基礎上進行右轉,每轉10°采集一次數據,其過程如圖2-圖5所示。
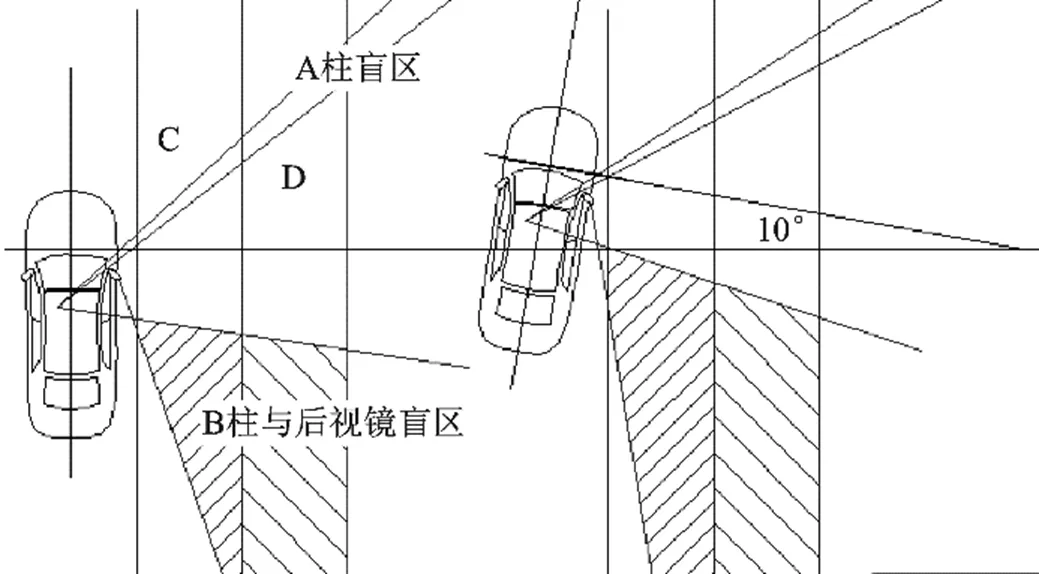
圖2 0°和10°右轉視野變化
由圖2-圖5可知,汽車右轉時有兩個特點:一是隨著汽車右轉,汽車與非機動車道的視野盲區范圍逐漸變大,至轉向結束,盲區基本保持;二是隨著汽車右轉角度增大,汽車單位時間內在非機動車道的探出速度不斷增加,直至轉向結束。

圖3 20°和30°右轉視野變化
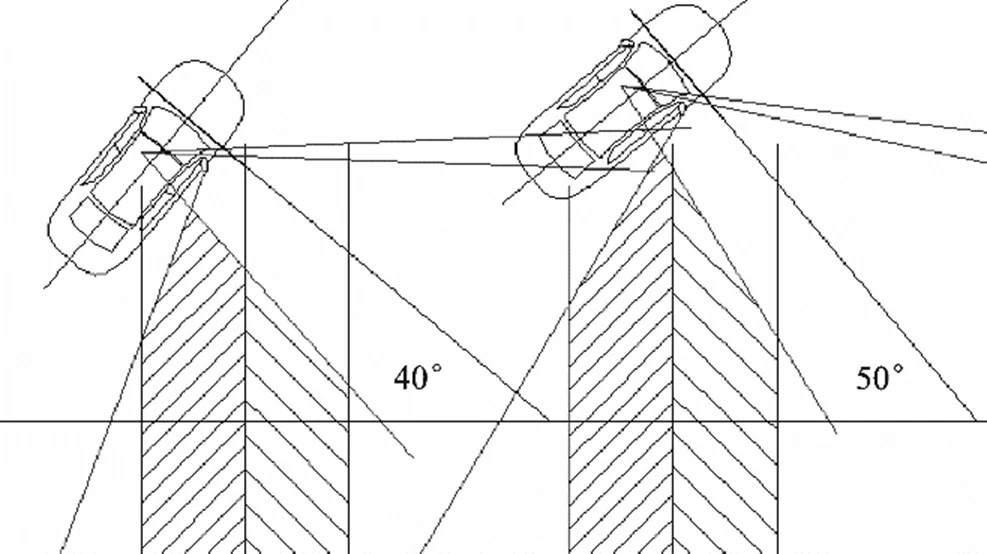
圖4 40°和50°右轉視野變化

圖5 60°和70°右轉視野變化
若C車道是非機動車道,當汽車右轉20°時,此時盲區最大,基本所有非機動車道來車都看不到。加之此時只有車頭一小部分露出非機動車道,容易給非機動車輛駕駛員造成可以過去的錯覺,因此,非常容易發生交通事故。當右轉30°時,盲區依舊較大,但車身已占據半個非機動車道,相對來說較為安全。右轉40°時,車身已占據全部非機動車道,基本不會發生交通事故。但因為運動需要時間,且右轉汽車探出速度逐步加快,因此,在右轉角20°時發生誤判,至發生交通事故時可能已右轉至30°或40°區間。
若D車道是非機動車道,右轉至40°時,汽車車頭才有一小部分探出,且此時已能看清離車輛較近的區域,但較遠的區域看不到,因此,此時非常容易引發交通事故。右轉50°時,車身已占據半個非機動車道,相對來說安全。右轉60°時,車身已占據全部非機動車道,基本不會發生交通事故。同理,若在右轉40°時發生誤判,至發生交通事故時可能已右轉至50°或60°區間。
2 右轉輔助系統的組成部分
此系統采用測距傳感器采集非機動車道行人及非機動車駕駛員的動態信息。通過短時間多次信息采集模擬行人及非機動車運動軌跡,然后與車輛位置進行比較,判斷可能的碰撞時間及碰撞點。最后采取畫面、聲音等報警方式提醒駕駛員。
2.1 紅外測距方法
國內對測距的種類和方法研究較多,尤其是紅外測距傳感器,其主要測距方法有脈沖式測距、相位差式測距、干涉式測距、三角式測距[5]。紅外測距在具備被動測距[6](定位)的同時,又可以測量溫度(分辨),近年在國內研究較多[7-10],技術較為成熟,故本文選紅外測距。
2.2 紅外傳感器安裝位置
為了確保在大多數情況都能采集到人員信息,紅外傳感器需一處有利的安裝位置,從車輛的前后及高低兩個維度來衡量,以便可以第一時間發現右側行人及非機動車輛。傳感器前后位置以靠前為最佳,可以第一時間測量數據;為應對有綠化帶時的情況,傳感器安裝需要一定的離地高度。綜合考量,在不改變車輛結構的情況下,安裝在右側后視鏡下方,此位置比較靠前且有一定離地高度。
2.3 軌跡擬合
軌跡擬合分為右側行人及非機動車運動軌跡,車輛運動軌跡兩部分。對于右側行人及非機動車來講,通過短時間內多次信息采集就可以完成軌跡擬合;而車輛相對行人及非機動車運動軌跡[11],可以根據行人及非機動車相對車輛轉動角度反向確定,在中控屏上顯示符合人眼視覺的畫面。
3 工作策略
3.1 控制方式
當右轉向燈開啟,或方向盤右轉超過限定角度時,本系統開始工作,對右側行人及非機動車進行檢測并預警。
3.2 預警方式
根據行人及非機動車與車輛之間的軌跡、距離和行車速度,判斷可能碰撞點及所需時間,顯示在中控屏上,并加以警示(方法包括圖像和聲音)。
3.3 預警策略
碰撞預警分為距離大于10 m、大于5 m小于10 m和小于5 m三個階段,系統工作及預警界面示意如圖6所示。
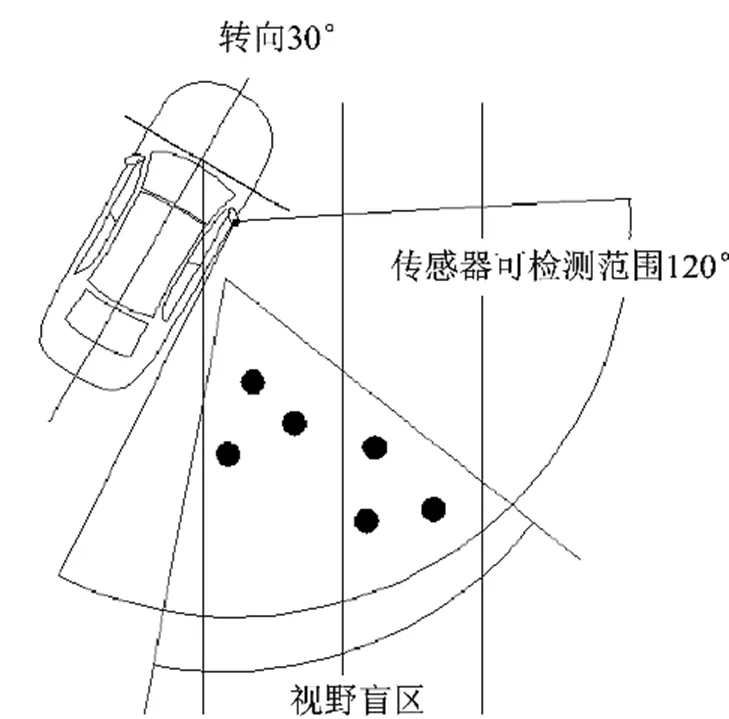
注:黑點代表行人或電動自行車,虛線內為盲區,虛線外為可視區域。
4 結論
本文通過分析汽車右轉過程,發現在右轉過程中,視野盲區基本保持,并在右轉向20°/40°時容易對非機動車道產生誤判,發生交通事故。針對這一潛在危險,提出利用紅外測距傳感器檢測右側行人及非機動車輛位置,同時確定傳感器安裝位置和控制策略,并將計算結果顯示到車內顯示器上,利用圖像和聲音對駕駛員進行提醒,從而避免交通事故。
[1] 國家統計局.2021年國民經濟和社會發展統計公報[M].北京:中國統計出版社,2021.
[2] 楊碩.基于個性化駕駛員設計的線控汽車自動換道系統研究[D].長春:吉林大學,2020.
[3] 曾瑋攀.基于人機共駕的轉向輔助系統控制研究[D].長沙:湖南大學,2019.
[4] 邊寧,趙保華,賴鋒,等.基于高速公路的半自動駕駛輔助系統的開發與應用[J].汽車安全與節能學報, 2017(2):149-156.
[5] 彭偉.相位差式紅外測距傳感器的研究與設計[D].長沙:湖南師范大學,2017.
[6] 王少白,宋璐.紅外雙波段被動測距技術研究[J].河南科技,2023,42(6):14-17.
[7] 蘇旭.具有距離自動修正的紅外溫度監測儀的研究與實現[D].呼和浩特:內蒙古大學,2017.
[8] 楊欣.人體紅外測溫系統設計[D].銀川:寧夏大學, 2021.
[9] 周潤.基于EIman神經網絡的雙波段紅外目標被動測距方法研究與實現[D].西安:西安電子科技大學, 2021.
[10] 莫然.高精度紅外測溫系統設計[D].成都:電子科技大學,2020.
[11] 馮來春.基于引導域的參數化RRT無人駕駛車輛運動規劃算法研究[D].合肥:中國科學技術大學,2017.
Design of Vehicle Right Turn Auxiliary System Based on Distance Sensor
HU Qinghui, SUN Qingwei, CHEN Yuanyong*, WANG Yujuan, GAO Yang
( Taishan Vocational and Technical College, Taian 271000, China )
In order to solve the problem of insufficient vision of the right non-motorized lane in the process of right turning, this paper proposes to install the ranging sensor in the front of the car to solve the problem. When the right turn signal is turned on, or the steering wheel turns right beyond the limit angle, the sensor starts to work, measure the position of the right pedestrian relative to the vehicle, forward speed, forward direction, and compare with the vehicle running track, calculate the possible collision time and collision point, and reflect on the center control screen to remind the driver to perform relevant operations. After research, it is found that when the vehicle turns to the right of 20°/40°, it is easy to misjudge the non-motorized lane. The system reminds the driver by image and sound to avoid traffic accidents.
Right turn auxiliary system;Distance sensor;Collision point;Collision time
U463.99
A
1671-7988(2023)20-26-04
10.16638/j.cnki.1671-7988.2023.020.006
胡慶輝(1986-),男,碩士,講師,研究方向為汽車應用技術,E-mail:guyueguangda@126.com。
陳元勇(1972-),男,碩士,副教授,研究方向為汽車電控技術,E-mail:13561787822@163.com。
泰山職業技術學院2021年度科技和人文社科課題(2021KY04)。
猜你喜歡
人民交通(2020年22期)2020-11-26 07:36:44
小學生優秀作文(低年級)(2020年4期)2020-07-24 08:31:08
汽車與安全(2019年9期)2019-11-22 09:48:03
汽車與安全(2019年8期)2019-09-26 04:49:10
汽車與安全(2019年5期)2019-07-30 02:49:51
汽車觀察(2019年2期)2019-03-15 06:00:06
汽車與新動力(2018年2期)2018-05-09 00:31:56
兒童時代·快樂苗苗(2017年7期)2018-01-24 18:28:45
作文大王·低年級(2016年4期)2016-04-18 00:24:37
決策探索(2014年21期)2014-11-25 12:29:50