基于差分進化算法的鋼軌輪廓迭代旋轉配準方法
2023-11-06 03:53:18沈倫旺馬子驥劉宏立蔣志文
鐵道學報 2023年10期
沈倫旺,馬子驥,劉宏立,蔣志文
(湖南大學 電氣與信息工程學院,湖南 長沙 410082)
鋼軌廓形檢測在軌道質量檢測中占有重要地位,通過將測量輪廓與標準輪廓進行對比,分析鋼軌磨耗狀態,為鋼軌維護保養提供科學依據[1-2]。
輪廓配準是鋼軌斷面輪廓檢測中的重要步驟,主要實現實測輪廓到標準輪廓坐標系的轉換。只有鋼軌輪廓的準確匹配,才能保證磨耗計算的精確性[3-5]。目前非接觸式鋼軌斷面輪廓測量主要采用激光視像技術或激光位移技術實現,因此,基于鋼軌斷面二維點云數據的配準方法是當前主流技術之一。譚周文等[6]提出基于軌腰圓心擬合配準,其配準精度高,當采樣的鋼軌輪廓數據不理想,軌腰軌底有缺失時,則無法完成配準。文獻[7-9]提出基于軌側直線和軌顎點的直接配準,該方法配準速度快,且不受軌腰軌底數據的影響,但其配準精度相對不足。另外,剛體ICP配準法[10-12],要求測量輪廓與標準輪廓曲線覆蓋范圍基本一致,這點在實際應用中是很難滿足的。
在實際檢測采樣中,由于列車原本就比較注重軌道表面的異物清除,因此軌頭部分的采樣極少受到干擾;而軌腰、軌底部分,受魚尾板、道旁異物等的影響,采樣輪廓往往與標準廓形相去甚遠。因此,為了保持在噪聲環境,甚至輪廓軌腰、軌底數據缺失等惡劣條件下的配準精度,需要重點提高配準方法的魯棒性。本文提出一種基于差分進化算法的輪廓迭代旋轉配準方法,該方法不以鋼軌輪廓中的某個直接采樣點為特征,而是從特征線段中重構特征點[13],從而保證在噪聲干擾嚴重的情況下依然能夠捕捉到鋼軌斷面輪廓的特征信息。以鋼軌軌顎點為旋轉中心,根據采樣輪廓相對標準輪廓的位置確定采樣輪廓的配準旋轉的方向。借助差分進化算法尋找最優的旋轉角度,根據旋轉角度計算最優的旋轉矩陣R以及根據軌顎點為中心計算出的平移矩陣T實現鋼軌輪廓的精確配準[14-19]。實驗結果表明,該方法具有很高的配準精度和魯棒性。
1 輪廓形態分析
1.1 測量輪廓形態定義
以我國鐵路線上最常用的60 kg/m鋼軌為例,標準輪廓斷面見圖1(a)。它由軌頭、軌腰、軌底組成。軌頭區點A為軌顎點,由1∶20、1∶3直線相交而成。A′A為軌頭側面直線,點Z為軌側直線A′A的中點。軌腰區BC為R=400 mm圓弧,CD為R=20 mm圓弧,兩者切于點C;軌底區DE、EF分別為1∶3、1∶9直線,兩者交于點E。
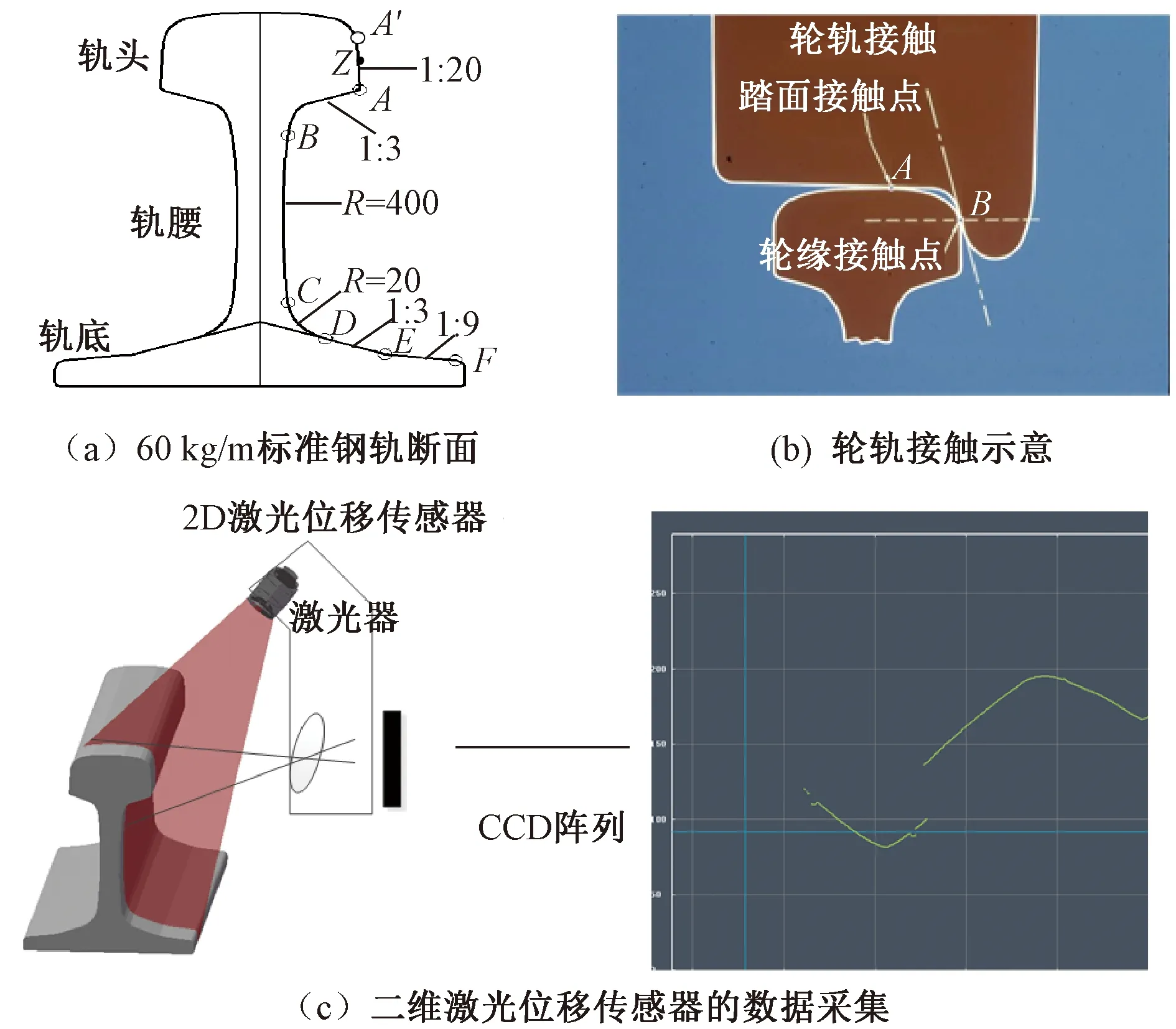
圖1 鋼軌數據介紹
輪軌接觸示意見圖1(b)。由圖1(b)可知,主要接觸磨損區域在軌頂至軌側上部。當鋼軌磨損嚴重,可能出現軌側直線磨損變短,A′點下移,導致軌側直線中點Z也隨之變動。相比于A′點,由于鋼軌磨損產生形變,Z點受鋼軌磨損的影響更小。而線激光采樣的有效輪廓包含軌頭、軌腰、軌底三基元,其采樣數據在軌顎處必然出現明顯間斷特征。以軌側直線中點Z、軌顎點A、軌腰起點B為特征點,對輪廓進行配準,見圖1(c)。
1.2 復雜線路輪廓介紹
實際鐵路線路復雜多變,主要分為普通軌道區、接頭區、道岔區。其中,普通軌道區占線路總長比例最大,正常情況下采樣到的普通軌道區,包含有完整的軌頭、軌腰和軌底基元,基于軌腰雙圓心擬合、軌側直線配準、剛體ICP配準,具有相對高的配準精度,能夠較為準確地計算出鋼軌磨耗值。但由于車體振動,障礙物遮擋,列車駛入接頭區、道岔區等特殊線路區域等情況,可能導致采集到的鋼軌輪廓數據異常。復雜線路不同區域的鋼軌輪廓形態見圖2。

圖2 復雜線路不同區域的鋼軌輪廓形態
圖2中,數據缺損或變形嚴重的鋼軌輪廓,無法準確計算鋼軌磨耗值,通常可直接去除。但當軌頭部分數據正常,只是軌腰軌底部分數據變形或缺損時,同樣也能準確計算出鋼軌磨耗值。然而由于數據缺失,傳統的配準方法通常無法準確進行校準,只能將此類鋼軌輪廓分為異常無效數據清除,而本文所提方法能有效配準,避免數據浪費。
2 配準方法
2.1 算法原理
基于二維激光位移傳感器車載式鋼軌磨耗檢測裝置,采樣得到鋼軌輪廓二維點云數據。先對其中值濾波,再判別其有效性。當軌頭位置數據完整時,一般可認為其為有效輪廓。標準輪廓對應的采樣數據見圖3。圖3中,縱、橫坐標分別是在2D激光位移傳感器量程范圍內接收到的被測物反射回的二維點坐標,縱坐標為直線距離,橫坐標為測量寬度。

圖3 標準輪廓采樣數據
車載檢測時,傳感器裝于車底,在軌道內側從斜上方投影獲取鋼軌輪廓信息,AB段的軌顎區被遮擋,所以采樣輪廓在AB段會出現間斷。由于設備自身影響以及復雜的檢測環境等因素,二維激光位移傳感器采集到的鋼軌輪廓數據中,點B必然存在波動,所以采樣到輪廓數據范圍也會有所差異。
得到有效輪廓之后,利用軌顎點處曲線間斷的特征和Ramer多邊形逼近算法[20]定位到點A′、A。求得軌側直線A′A的中點Z,通過Z、A、B進行匹配,以軌顎點A為旋轉中心和平移對應點,通過采樣輪廓Z、B和標準輪廓Z、B在同一坐標的相對位置判別旋轉方向。通過差分進化算法進行迭代,選取采樣輪廓正常的軌腰段作為相似度度量段。以采樣輪廓軌腰間斷點B和采樣輪廓多邊形逼近法求得的點C作為度量段重合區的起止點(每幅采樣輪廓的軌腰覆蓋范圍不固定,且可能存在軌腰被遮擋,數據點缺失等情況,點C位置不固定);以采樣輪廓的BC段與標準輪廓求得的相對應的BC段為匹配基元,以采樣輪廓BC段各點至標準輪廓曲線的最近距離的均值為約束條件,直至迭代結束,選出最優配準的旋轉角度。算法流程見圖4。

圖4 DE算法迭代旋轉配準流程
2.2 配準流程
2.2.1 二維數據配準
基于激光位移傳感器磨耗檢測系統,傳感器相對鋼軌的照射角度一般取45°進行數據采集,采樣得到的鋼軌輪廓數據為二維點云數據。假設得到的二維點云數據由n個點組成,坐標為(xi,yi),i=1,2,…,n,設采樣輪廓軌顎點A′、標準輪廓軌顎點A的坐標分別為(xsa,ysa)、(xst,yst),則
(1)

2.2.2 DE算法
DE算法也稱差分進化算法,是1997年由Storn等[21]提出的一種基于群體差異的進化計算方法,主要參數有種群大小Np、縮放因子F、交叉概率CR。本文從實際問題出發,以采樣輪廓特征曲線位置的點至參考輪廓曲線最近的歐氏距離的平均值為約束條件,通過采樣輪廓和參考輪廓特征點的相對位置控制迭代方向,尋求最優R。
在差分進化算法迭代尋求最優R時,以sinθ為個體的定義,傳感器采樣的照射角度為初始旋轉角度,則sinθ起始值Sin=sin45°,每次旋轉角度范圍為(0,30°),即Sin的范圍為(0,0.5)。軌顎具有間斷特性,非常容易定位。所以,以采樣輪廓軌顎間斷點A為采樣輪廓的旋轉中心點,以求得的采樣輪廓軌側中點Z和軌腰間斷點B相對標準輪廓對應的點Z、B的位置判別每次迭代的旋轉方向。設測量輪廓點、標準輪廓點Z的坐標分別為(xsa1,ysa1)、(xst1,yst1),測量輪廓、標準輪廓點B的坐標分別為(xsa2,ysa2)、(xst2,yst2)。當xsa1>xst1且xsa2
差分進化算法(DE)迭代配準的具體步驟如下:
Step1設定DE的算法參數。迭代次數為Gm,種群大小為Np,變異概率F0=0.5,交叉概率CR=0.9,只需求得sinθ。根據三角函數性質可以確定旋轉矩陣R。所以個體的定義為:正弦值sinθ,數據維度D=1,其范圍為(0,0.5)。
Step2隨機產生初始種群M,種群大小為Np,即隨機產生Mi,j,i=1,2,…,l,…,p,…,q,…,Np,j=D=1。
進入循環G=1,2,…,Gm。
Step3變異操作。
①從M中隨機選擇3個不同的Mi,i=l,p,q;i≠p≠q。
②對Mi進行變異,計算縮放因子F。
β=exp[1-Gm/(Gm+1-G)]
(2)
F=F0·2β
(3)
③產生變異個體si。
si=Ml+F·(Mp-Mq)
(4)
且要保證變異的個體,其維度依然在(0,0.5)范圍內。
Step4交叉操作。設交叉后的種群為Ui,rand為隨機產生(0,1)的數據。由于本文方法個體維度為1,所以不需要對個體的各個維度進行判斷是否需要進行交叉,只需要判斷rand>CR是否成立,如果成立,則當前交叉后的個體為Ui=Mi;否則Ui=si。
Step5旋轉方向選擇操作。在Step6中經過上一代迭代之后,在種群中選出的最優旋轉角度,對測量輪廓進行旋轉。根據采樣輪廓Z、B兩點相對標準輪廓對應點的位置。判斷本次迭代旋轉方向,見圖5。

圖5 輪廓旋轉
由圖5可知,當xsa1>xst1且xsa2
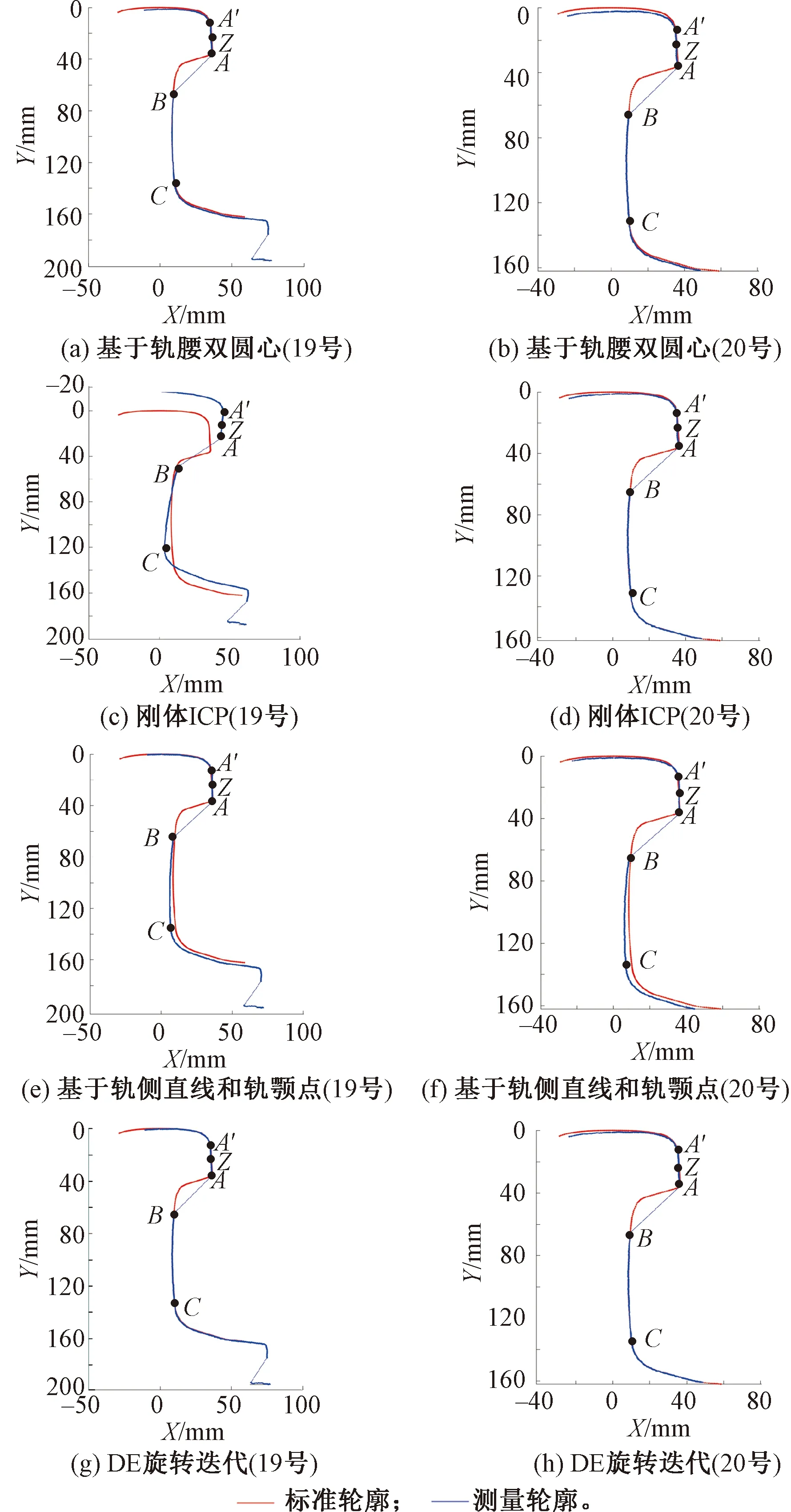
由于測量輪廓變形或者加工精度等影響,實驗中發現可能會出現可能存在xsa1>xst1且xsa2>xst2,這時也應該對其順時針方向旋轉Sin=Sin+Ui;xsa1 Step6選擇操作。計算新的Sin中每一個個體的適應值,即通過求得的Sin中每一個個體sinθ,求得對應的旋轉矩陣R,利用旋轉矩陣旋轉后,本文以采樣輪廓軌腰起點B和以多邊形逼近算法Dmax=0.6 mm為閾值,多邊形逼近法求得的正常軌腰段終點C之間的數據段作為采樣輪廓和標準輪廓匹配重合區;計算重合段采樣輪廓各點到標準輪廓曲線的最近歐式距離,求得平均值。找出使得平均值最小的個體,即本代種群中最優的旋轉角度,將其保留給Sin做下一次迭代時計算Step5。 Step7選擇最優值,迭代結束。通過對比每一代最優角度值對采樣輪廓旋轉后,采樣輪廓的匹配重合區BC段各點至標準輪廓曲線最近距離的平均值,選出所有代中的最優值,即為最終結果。 輪廓精準配準見圖6。 圖6 輪廓精準配準 由圖6可知,本文通過多邊形逼近法定位點C,以及BC段重合區做匹配,有效避免了特殊軌形在軌腰數據異常時無法準確配準,導致磨耗檢測不準確的情況。 采用基于真尚有公司的高精度2D激光位移傳感器設計的車載式鋼軌動態檢測系統,在10 幅/m的頻率下進行輪廓數據采集,采集后的數據統一傳輸給車載工控機進行處理,并保存數據。 實驗數據來自車載式鋼軌動態檢測系統對100 m長鋼軌采集的1 000幅有效鋼軌輪廓真實數據。其中,包括800幅正常輪廓數據,200幅軌腰異常輪廓數據。分別從兩個方面對本文所提方法的高精度和普適性、魯棒性進行論證:①配準精度實驗,對比不同方法對相同正常輪廓樣本數據進行配準后的精度;②點云數據丟失實驗,對比不同方法對點云數據缺失的異常輪廓樣本數據進行配準。 從車載式鋼軌動態檢測系統采樣到的有效鋼軌輪廓數據中,隨機選擇20幅有效輪廓,分別使用基于軌側直線和軌顎點配準方法、傳統的軌腰雙圓心擬合配準方法及剛體ICP配準方法與本文方法配準后的均方誤差統計(MSE)結果進行對比,其值越小,精度越高。配準后的均方誤差為 (5) 式中:(xsak,ysak)、(xstk,ysak)分別為待配準的測量輪廓和標準輪廓的坐標。 選取20幅正常鋼軌輪廓數據,比較4種不同的配準方法。本文以第19、20幅鋼軌輪廓的配準效果為例進行展示,見圖7。對比結果見表1。 表1 不同配準精度實驗MSE結果對比 mm 圖7 第19、20號正常數據在不同配準方法中配準效果對比 由圖7可知,正常輪廓數據配準時,剛體ICP算法的配準效果十分不穩定,具有很大的跳變性。這是由于其非常依賴于二維點云的初始位置,且要求測量輪廓與標準輪廓的曲線覆蓋范圍基本一致。當測量輪廓與標準輪廓廓形接近時,配準精度高;存在差異時配準精度低。基于軌側直線和軌顎點的配準算法,其配準精度整體表現不佳。基于軌腰雙圓心的配準算法,精度相對較高。數據正常時,與剛體ICP算法相比,受測量輪廓廓形影響較小,配準效果較為穩定。但是與上述3種方法比較,本文所提DE旋轉迭代算法,配準精度更高,穩定性更好,且對測量輪廓的曲線和特征點要求較低,算法更具魯棒性。 從采樣到的數據缺失輪廓中隨機選擇20幅異常輪廓,同樣采用4種方法分別進行配準,見圖8。根據均方誤差統計(MSE)結果,比較在數據缺損的情況下各個配準方法的性能,結果見表2。 表2 點云數據丟失實驗MSE結果對比 mm 圖8 7號數據缺損在不同配準方法對比 由圖8、表2可知,當鋼軌輪廓軌腰和軌底被遮擋,或是從特殊區域(道岔等)采樣到的變形、數據缺損輪廓數據時,基于軌側直線和軌顎點的配準算法穩定性較強,但是其配準精度始終較低。基于軌腰雙圓心的配準算法,因為在軌腰缺損時失去配準基元,導致其配準性能的急劇惡化,甚至無法配準。剛體ICP算法的配準效果也同樣受到了輪廓點云數據缺損的影響。在實際應用過程中,這3種配準方法的魯棒性都有所欠缺,影響真實磨耗值的計算。而本文所提方法,當點云數據缺損時,通過多邊形逼近算法求得正常的軌腰段BC和軌腰終點C,其配準效果依然保持較高精度和較好的魯棒性,表現出優越的抗干擾能力,具有非常重要的工程應用價值。 本文提出基于DE旋轉迭代配準技術,通過大量實驗以及研究表明,軌腰雙圓心擬合以及剛體ICP和基于軌側直線等配準方法,都存在著自身配準精度低或是對輪廓數據要求非常高,魯棒性不足等缺點。本文方法不管是數據是否正常,配準精度都非常高且非常穩定。由此可知其精度和抗干擾能力具有很大的優勢,具有高魯棒性。而且,本文方法應用簡單,工程應用價值更高,有利于鋼軌磨耗動態檢測技術的進步以及推廣。
3 實驗與仿真
3.1 實驗平臺及數據采集
3.2 配準精度實驗

3.3 點云數據丟失實驗


4 結論
猜你喜歡
城市道橋與防洪(2022年4期)2022-07-01 06:04:12
兒童故事畫報(2019年5期)2019-05-26 14:26:14
當代陜西(2019年8期)2019-05-09 02:22:48
動漫星空(興趣百科)(2019年3期)2019-03-07 07:23:10
家庭影院技術(2018年4期)2018-05-09 07:07:52
Coco薇(2016年2期)2016-03-22 02:42:52
專用汽車(2016年4期)2016-03-01 04:13:43
質量與標準化(2015年9期)2015-12-31 11:41:40
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長指南(2015年7期)2015-08-11 15:03:12
