基于BP神經(jīng)網(wǎng)絡(luò)的轉(zhuǎn)向架斜楔參數(shù)優(yōu)化
2023-11-06 03:52:48劉嘉興呂大立呂可維張琪昌李玉龍
鐵道學報 2023年10期
劉嘉興,呂大立,3,呂可維,張琪昌,李玉龍
(1.天津大學 機械工程學院,天津 300072;2.天津市非線性動力學與控制重點實驗室,天津 300072;3.天津大學 內(nèi)燃機研究所,天津 300072;4.中車齊齊哈爾車輛有限公司 大連研發(fā)中心,遼寧 大連 116042)
斜楔減振器是鐵路貨車轉(zhuǎn)向架的重要元件,對轉(zhuǎn)向架以及整個車體的減振性能有重要影響[1]。文獻[2]指出,轉(zhuǎn)向架斜楔產(chǎn)生的卡滯現(xiàn)象是當前轉(zhuǎn)向架優(yōu)化設(shè)計研究中迫切需要解決的問題,確定斜楔參數(shù)的最優(yōu)配置是解決卡滯問題的重要途徑。然而如何去確定合適的斜楔參數(shù)是一個需要解決的問題,文獻[3-4]研究已經(jīng)表明斜楔摩擦系數(shù)對貨車動力學性能影響的復雜性。因此,采用傳統(tǒng)解析方法,推導斜楔參數(shù)與車體響應(yīng)的解析關(guān)系式,再根據(jù)解析關(guān)系式對斜楔參數(shù)進行優(yōu)化是難以實現(xiàn)的。
針對上述問題,本文采用數(shù)據(jù)驅(qū)動[5]的方法建立斜楔參數(shù)與車體響應(yīng)關(guān)系模型,根據(jù)建立的關(guān)系模型對斜楔進行優(yōu)化。采用該方法對斜楔進行參數(shù)優(yōu)化,需要大量的準確數(shù)據(jù)做支撐。由于貨車系統(tǒng)龐大且復雜,較難通過實驗獲得不同斜楔參數(shù)下的車體響應(yīng)數(shù)據(jù),因此本文通過準確的貨車仿真模型獲得所需數(shù)據(jù)。
隨著近年來剛?cè)狁詈隙囿w動力學的發(fā)展,越來越多學者的研究表明貨車部件柔性對貨車動力學性能有較大影響[6-8]。因此為了保證貨車模型的準確性,本文建立貨車剛?cè)狁詈隙囿w動力學模型計算不同斜楔參數(shù)下的車體響應(yīng)。為了保證不同斜楔參數(shù)下的車體響應(yīng)數(shù)據(jù)準確且滿足數(shù)量要求,應(yīng)確保斜楔部分的建模能準確反映斜楔作用,且易于更改斜楔參數(shù)。
由于斜楔與轉(zhuǎn)向架其他部件搖枕、側(cè)架等相比質(zhì)量較小,通常被處理成一個簡單力元。傳統(tǒng)方法采用相對摩擦系數(shù)φ建立摩擦力元等效替代斜楔的作用,其定義為轉(zhuǎn)向架加載和減振過程中,斜楔主摩擦面摩擦力的平均值與中央懸掛彈簧垂向力的比值[9],即
(1)
式中:fl為轉(zhuǎn)向架加載時斜楔主摩擦面摩擦力;fu為轉(zhuǎn)向架減載時斜楔主摩擦面摩擦力;Pz為轉(zhuǎn)向架中央懸掛所有彈簧垂向力的合力。
采用相對摩擦系數(shù)法可以描述斜楔的減振作用,獲得一個相對準確的轉(zhuǎn)向架動力學模型,且采用該方法處理斜楔復雜度低,因此近年來仍有學者采用該方法處理斜楔[6,10]。然而相對摩擦系數(shù)法只考慮了斜楔的垂向作用,斜楔縱向、橫向以及抗菱作用并未考慮,且該方法只能反映斜楔在一個加減載循環(huán)內(nèi)的垂向摩擦作用,并不能反映斜楔實時的摩擦作用。針對上述問題,文獻[11]在ADAMS軟件中建立斜楔實體模型,利用固定在斜楔體上的4個小球建立斜楔的接觸關(guān)系。文獻[9]在Simpack軟件中建立可以分析斜楔多向動態(tài)作用的斜楔實體模型,計算結(jié)果與試驗有較好的吻合度。文獻[12-13]在UM中建立斜楔的實體模型,斜楔與側(cè)架的接觸區(qū)域用4個角點坐標來描述。
與相對摩擦系數(shù)方法相比,建立斜楔實體模型模擬斜楔作用,模型準確度更高。然而由于模型復雜度高,斜楔形狀尺寸的變動都需要對模型進行一定程度的更改,因此不利于計算不同斜楔參數(shù)下的車體響應(yīng),尤其是考慮轉(zhuǎn)向架柔性時,將進一步增加建立斜楔實體模型的復雜程度。
綜上,相對摩擦系數(shù)法簡便,但無法反映斜楔多向作用;斜楔實體模型方法可以準確模擬斜楔作用,但模型相對復雜,不利于計算不同斜楔參數(shù)下的車體響應(yīng)。因此采用等效作用力元的方法模擬斜楔作用,使模型能準確反映斜楔多向作用,同時便于計算不同斜楔參數(shù)下的車體響應(yīng)。以轉(zhuǎn)K6轉(zhuǎn)向架為研究對象,在垂向、橫向、縱向及抗菱作用上對斜楔進行受力分析,分析斜楔各向的等效作用,建立斜楔各個方向上的等效參數(shù)力元模擬斜楔作用;進一步在Simpack軟件中建立便于優(yōu)化斜楔主摩擦系數(shù)、副摩擦系數(shù)及斜楔角度,同時考慮車體、側(cè)架、搖枕柔性的C70E剛?cè)狁詈县涇囌嚩囿w動力學模型。
利用上述貨車整車多體動力學模型,計算不同斜楔參數(shù)下的車體加速度響應(yīng),采用遺傳算法優(yōu)化的BP神經(jīng)網(wǎng)絡(luò)建立斜楔參數(shù)與車體加速度響應(yīng)的關(guān)系模型,并以此關(guān)系模型為適應(yīng)度函數(shù),并利用遺傳算法對斜楔參數(shù)進行優(yōu)化,尋找在一定合理參數(shù)范圍內(nèi)使貨車車體加速度響應(yīng)最小的斜楔參數(shù)。
1 斜楔等效作用力學分析
1.1 模型簡介
轉(zhuǎn)K6轉(zhuǎn)向架模型如圖1所示,斜楔與側(cè)架的接觸面為主摩擦面,與水平面垂直;斜楔與搖枕的接觸面為副摩擦面;斜楔角度α為副摩擦面與斜楔底面的夾角。由于貨車運行時斜楔與側(cè)架、搖枕的接觸區(qū)域變形量與三者位移相比較小,因此在力學分析過程中,假定斜楔、側(cè)架與搖枕均為剛體,斜楔與搖枕側(cè)面無間隙。
1.2 垂向作用
當搖枕上存在垂向預(yù)加載力FC0及垂向力FC1作用時,轉(zhuǎn)向架及斜楔受力如圖2所示。垂向力FC1方向向下時,轉(zhuǎn)向架為加載狀態(tài),搖枕速度v為正。當主摩擦面與水平面垂直,斜楔副摩擦面僅在斜楔運動方向改變時存在摩擦力[9]。因此垂向運動時,斜楔受力如圖2左側(cè)所示,圖中μ1為主摩擦面摩擦系數(shù),FP為斜楔彈簧力,FR1為側(cè)架對斜楔的壓力,FN1為搖枕對斜楔的正壓力。

圖2 轉(zhuǎn)向架垂向受力
由圖2可知,在轉(zhuǎn)向架垂向加載或減載過程中,斜楔減振器在垂向提供了斜楔彈簧力FP和主摩擦面摩擦力fc的作用,fc可以表示為
(2)
式中:sign為符號函數(shù)。同時為了在模型中反映斜楔變向時的摩擦力作用,斜楔摩擦力fcz為
(3)
式中:f0為靜摩擦力,在Simpack中由斜楔與側(cè)架的速度和受力狀態(tài)判定;veps為判斷斜楔是否滑動的速度條件,在Simpack中一般設(shè)為0.001 m/s。
1.3 橫向作用
當轉(zhuǎn)向架僅在水平面發(fā)生橫向運動時,轉(zhuǎn)向架受力如圖3所示。在轉(zhuǎn)向架橫向運動過程中,斜楔在橫向僅提供了斜楔彈簧橫向力FPH及主摩擦面橫向摩擦力FRH的作用。在Simpack中FPH可由斜楔彈簧橫向剛度設(shè)定;橫向摩擦力FRH可由垂向摩擦力公式(3),根據(jù)斜楔垂向和橫向的速度進行正交分解[9]得到。

圖3 轉(zhuǎn)向架橫向受力
1.4 縱向作用
當斜楔彈簧預(yù)壓縮量為f,搖枕發(fā)生縱向位移x時,轉(zhuǎn)向架受力如圖4所示。FQ1和FQ2分別表示前后斜楔彈簧所提供的力;當搖枕發(fā)生縱向位移x時,斜楔的垂向位移為h。斜楔在搖枕縱向加載過程中提供縱向等效剛度的作用。

圖4 轉(zhuǎn)向架縱向受力
分別對前后斜楔進行受力分析,再對轉(zhuǎn)向架整體進行縱向受力分析,可以得到斜楔提供的搖枕縱向力Fz與搖枕位移x之間的關(guān)系,Fz對x求導可以得到斜楔提供的縱向等效剛度kz為
(4)
式中:ks為斜楔彈簧垂向剛度;μ2為副摩擦面摩擦系數(shù)。
1.5 抗菱作用
當轉(zhuǎn)向架發(fā)生菱形變形時,如圖5所示,搖枕與側(cè)架的相對位置由垂直變?yōu)閮A斜,側(cè)架寬度為L不變,搖枕與斜楔的縱向?qū)挾茸冋?兩斜楔被擠向搖枕中央,斜楔沿副摩擦面向下運動,當側(cè)架相對搖枕轉(zhuǎn)動角度θ時,兩斜楔作用于側(cè)架的力F1在側(cè)架中心產(chǎn)生的力矩M,即斜楔在轉(zhuǎn)向架發(fā)生菱形變形時對側(cè)架提供的力矩作用[14]。

圖5 轉(zhuǎn)向架抗菱受力
對斜楔進行受力分析,再對轉(zhuǎn)向架整體進行受力分析,得到斜楔對側(cè)架提供的力矩M和側(cè)架轉(zhuǎn)角θ之間的關(guān)系,M對θ求導可得斜楔提供的抗菱剛度kL為
(5)
式中:b為斜楔縱向?qū)挾鹊囊话搿?/p>
2 貨車剛?cè)狁詈夏P?/h2>2.1 模型的建立
當車輛高速運行時,車輛部件的柔性作用對車輛動力學性能有重要影響。因此,為了準確描述貨車的動力學性能,建立考慮轉(zhuǎn)向架及車體柔性的C70E貨車剛?cè)狁詈夏P?建模流程如圖6所示。根據(jù)C70E貨車參數(shù)[6],在有限元軟件中建立車體、轉(zhuǎn)向架部件側(cè)架與搖枕的有限元模型,對車體、搖枕以及側(cè)架進行模態(tài)分析和子結(jié)構(gòu)分析,將計算好的相關(guān)文件通過Simpack的FEMBS接口程序生成彈性體標準輸入文件,并導入Simpack中,生成車體、搖枕及側(cè)架的柔性體模型,同時在Simpack中建立其他不考慮柔性的剛體部件模型,建立好的C70E貨車剛?cè)狁詈险嚹P腿鐖D7所示,其中貨車車體、搖枕、側(cè)架為柔性體,輪對為剛體。

圖6 剛?cè)狁詈夏P徒A鞒?/p>

圖7 C70E貨車剛?cè)狁詈夏P?/p>
在建立好的C70E貨車剛?cè)狁詈险嚹P偷幕A(chǔ)上,采用本文提出的斜楔等效作用法對斜楔進行建模處理,參照如下步驟進行設(shè)置:將斜楔角度、主摩擦系數(shù)、副摩擦系數(shù)、斜楔彈簧剛度及斜楔縱向?qū)挾?代入斜楔垂向、橫向、縱向及抗菱作用解析式(2)~式(5),在Simpack中建立斜楔等效摩擦力元及等效剛度力元模擬斜楔作用。
2.2 模型驗證
為了確保剛?cè)狁詈县涇嚹P蜕蠈π毙▍?shù)進行優(yōu)化的精度滿足要求,對建立的C70E貨車剛?cè)狁詈夏P瓦M行驗證。
通過對比貨車模型的模態(tài)振型頻率和非線性臨界速度驗證模型的準確性,C70E貨車剛?cè)狁詈夏P?是根據(jù)文獻[6]中的C70E貨車參數(shù)建立而成的,因此將通過Simpack多體動力學軟件,計算本文建立的C70E貨車剛?cè)狁詈夏P偷哪B(tài)振型,并將計算得到的模態(tài)振型頻率與文獻[6]中的C70E實車系統(tǒng)的模態(tài)試驗數(shù)據(jù)進行對比。仿真模態(tài)振型頻率和試驗?zāi)B(tài)結(jié)果見表1,可以看出模態(tài)試驗的振型頻率與本文模態(tài)仿真的振型頻率基本一致,驗證了本文建立模型的合理性。

表1 模態(tài)振型頻率結(jié)果對比 Hz
為了進一步驗證模型的動力學性能是否與實際情況相近,在Simpack多體動力學軟件中計算貨車模型的非線性臨界速度,并與實際的臨界速度進行對比。在Simpack軟件中,使貨車通過有初始激勵的路段,觀察貨車在平直無不平順路段的輪對橫移量是否收斂來計算貨車的臨界速度[8]。由中車齊齊哈爾車輛有限公司研制的C70E貨車空車時的臨界速度范圍為140~150 km/h,當采用斜楔等效作用法處理斜楔時,貨車第一輪對和第三輪對橫移量如圖8所示,在速度為139 km/h時收斂,在速度為140 km/h時處于臨界狀態(tài),貨車臨界速度為140 km/h,與實際的臨界速度接近。

圖8 斜楔等效作用法臨界速度
綜上,本文建立的C70E貨車剛?cè)狁詈夏P偷哪B(tài)特征與實際貨車基本一致,模型的臨界速度也與實際臨界速度接近,驗證了貨車模型的準確性。因此采用本文提出的斜楔等效作用法處理斜楔能得到一個準確的貨車模型,提高了鐵路貨車多體動力學分析的準確性,同時該處理方法復雜程度較低,更利于計算不同斜楔參數(shù)下的貨車車體響應(yīng)。
3 斜楔參數(shù)優(yōu)化
相對于橫向,斜楔在轉(zhuǎn)向架的垂向和縱向起著更大的減振作用[1]。本文選取車體垂向和縱向加速度作為優(yōu)化指標,評價斜楔參數(shù)對轉(zhuǎn)向架減振性能的改善。然而由于貨車系統(tǒng)的復雜性,難以推導斜楔參數(shù)與車體響應(yīng)之間的解析公式,尤其是考慮貨車車體及轉(zhuǎn)向架柔性時,難度將大幅增加。因此,當考慮貨車部件柔性作用時,采用傳統(tǒng)解析方法對斜楔參數(shù)進行優(yōu)化是難以實現(xiàn)的。
考慮上述問題,本文采用數(shù)據(jù)驅(qū)動的方法建立斜楔參數(shù)與貨車車體垂向和縱向加速度響應(yīng)的關(guān)系模型,并以此關(guān)系模型為基礎(chǔ)采用遺傳算法對斜楔參數(shù)進行尋優(yōu),在一定合理參數(shù)范圍內(nèi),找到使車體加速度響應(yīng)最小的斜楔參數(shù),具體步驟如圖9所示。輸入不同的斜楔角度α、主摩擦系數(shù)μ1、副摩擦系數(shù)μ2,代入斜楔各向等效作用式(2)~式(5)進行計算,根據(jù)作用公式的計算值在Simpack中設(shè)置斜楔各向等效參數(shù)力元,利用建立好的C70E貨車剛?cè)狁詈险嚹P?計算貨車在運行速度120 km/h下,在德國高激勵軌道譜[6]上的車體垂向加速度及縱向加速度,得到不同斜楔參數(shù)下的車體加速度響應(yīng)數(shù)據(jù)。根據(jù)斜楔參數(shù)響應(yīng)數(shù)據(jù),利用數(shù)據(jù)驅(qū)動的方法建立如圖10所示的斜楔參數(shù)與車體加速度關(guān)系模型,并根據(jù)此關(guān)系模型對斜楔進行參數(shù)優(yōu)化。以此關(guān)系模型為基礎(chǔ),采用遺傳算法對斜楔角度、主摩擦系數(shù)、副摩擦系數(shù)進行參數(shù)編碼,在一定合理參數(shù)范圍內(nèi),尋求使車體垂向加速度與縱向加速度之和最小的斜楔參數(shù)組合。

圖9 斜楔參數(shù)——車體響應(yīng)流程

圖10 斜楔參數(shù)——車體響應(yīng)關(guān)系模型
3.1 BP神經(jīng)網(wǎng)絡(luò)模型
人工神經(jīng)網(wǎng)絡(luò)常用于解決模式識別中的非線性映射或分類問題,近年來在鐵路車輛領(lǐng)域得到了大量應(yīng)用,推進了鐵路車輛相關(guān)研究領(lǐng)域的發(fā)展[15-18]。BP神經(jīng)網(wǎng)絡(luò)是人工神經(jīng)網(wǎng)絡(luò)中應(yīng)用最廣泛、發(fā)展比較成熟的一種,通過對訓練樣本進行學習,合理提取樣本中的規(guī)則,對測試樣本具有預(yù)測能力。但BP神經(jīng)網(wǎng)絡(luò)的全局搜索能力較差,易陷入局部極值點,影響預(yù)測精度。而遺傳算法是一種基于生物自然選擇和遺傳機理的隨機搜索和優(yōu)化方法,具有較強的全局尋優(yōu)能力。因此本文使用遺傳算法優(yōu)化的BP神經(jīng)網(wǎng)絡(luò)建立斜楔參數(shù)與車體響應(yīng)的關(guān)系模型,使用遺傳算法對BP神經(jīng)網(wǎng)絡(luò)的初始權(quán)值和閾值進行優(yōu)化,使BP神經(jīng)網(wǎng)絡(luò)達到全局最優(yōu)。
遺傳算法優(yōu)化BP神經(jīng)網(wǎng)絡(luò)的步驟如圖11所示,遺傳算法以BP神經(jīng)網(wǎng)絡(luò)的初始權(quán)值和閾值作為優(yōu)化的個體參數(shù)進行編碼,以BP神經(jīng)網(wǎng)絡(luò)的誤差作為適應(yīng)度值,對參數(shù)編碼進行選擇、變異和交叉操作,對參數(shù)不斷進行遺傳優(yōu)化,得到在一定范圍內(nèi)使BP神經(jīng)網(wǎng)絡(luò)精度最高的初始權(quán)值和閾值,最后經(jīng)過訓練得到滿足精度的神經(jīng)網(wǎng)絡(luò)模型。

圖11 遺傳算法優(yōu)化BP神經(jīng)網(wǎng)絡(luò)流程
為了得到斜楔參數(shù)與車體垂向以及縱向加速度的樣本數(shù)據(jù),選取8組斜楔角度、8組主摩擦系數(shù)及8組副摩擦系數(shù),總計512組參數(shù)組合作為輸入樣本數(shù)據(jù),見表2。
根據(jù)斜楔等效作用公式,當?shù)刃偠刃∮?時,對搖枕施加一個方向的主動力,無法發(fā)生對應(yīng)方向的位移,斜楔發(fā)生自鎖,因此需保證斜楔等效作用式(2)、式(4)、式(5)均大于0才能保證斜楔不發(fā)生自鎖,于是有
(6)
根據(jù)式( 6 ),將512組斜楔參數(shù)組合中發(fā)生自鎖的斜楔參數(shù)組合排除,得到266組不發(fā)生自鎖的斜楔參數(shù)組合,根據(jù)圖11所示流程,計算266組斜楔參數(shù)下的車體垂向和縱向加速度均方根有效值(RMS),266組參數(shù)組合中的垂向、縱向以及垂向與縱向數(shù)值之和的最大、最小值見表3。

表3 車體加速度響應(yīng)結(jié)果 m/s2
將斜楔角度α、主摩擦系數(shù)μ1、副摩擦系數(shù)μ2作為BP神經(jīng)網(wǎng)絡(luò)輸入數(shù)據(jù),車體垂向及縱向加速度RMS作為輸出數(shù)據(jù),對輸入和輸出數(shù)據(jù)進行歸一化處理,并將266組樣本數(shù)據(jù)隨機打亂,前246組作為訓練數(shù)據(jù),后20組作為測試數(shù)據(jù)。BP神經(jīng)網(wǎng)絡(luò)選擇雙隱層結(jié)構(gòu),一層和二層節(jié)點均為30,訓練函數(shù)選擇LM算法,并采用如圖11所示的利用遺傳算法優(yōu)化BP神經(jīng)網(wǎng)絡(luò)初始權(quán)值和閾值的方法進行訓練。訓練后得到的車體垂向加速度RMS預(yù)測結(jié)果如圖12所示,平均相對誤差為5.84%。車體縱向加速度RMS預(yù)測結(jié)果如圖13所示,平均相對誤差為7.58%,預(yù)測精度在可接受范圍內(nèi)。

圖12 BP神經(jīng)網(wǎng)絡(luò)垂向加速度預(yù)測結(jié)果
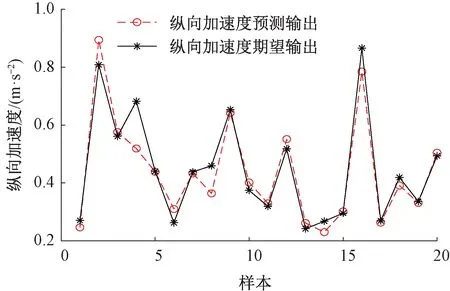
圖13 BP神經(jīng)網(wǎng)絡(luò)縱向加速度預(yù)測結(jié)果
3.2 遺傳算法參數(shù)優(yōu)化
在得到斜楔參數(shù)與車體垂向以及縱向加速度的BP神經(jīng)網(wǎng)絡(luò)模型后,運用遺傳算法對斜楔參數(shù)進行優(yōu)化,對斜楔角度α、主摩擦系數(shù)μ1、副摩擦系數(shù)μ2進行編碼,以訓練得到的BP神經(jīng)網(wǎng)絡(luò)模型為適應(yīng)度函數(shù),將車體垂向與縱向加速度RMS之和作為適應(yīng)度值。設(shè)置尋優(yōu)邊界:斜楔角度40°~65°,主摩擦系數(shù)0.15~0.5,副摩擦系數(shù)0.15~0.5。同時為了避免斜楔發(fā)生自鎖,再設(shè)置如式( 6 )所示的邊界條件。通過遺傳算法中的選擇、變異和交叉操作對個體進行篩選,種群反復遺傳優(yōu)化,直至在設(shè)置的參數(shù)邊界范圍內(nèi)尋找到使車體垂向與縱向加速度RMS之和最小的斜楔參數(shù)。
遺傳算法種群迭代適應(yīng)度曲線如圖14所示,在70代左右種群最佳適應(yīng)度達到最優(yōu)。得到最優(yōu)斜楔參數(shù):斜楔角度為49.2°、主摩擦系數(shù)為0.5、副摩擦系數(shù)為0.15。
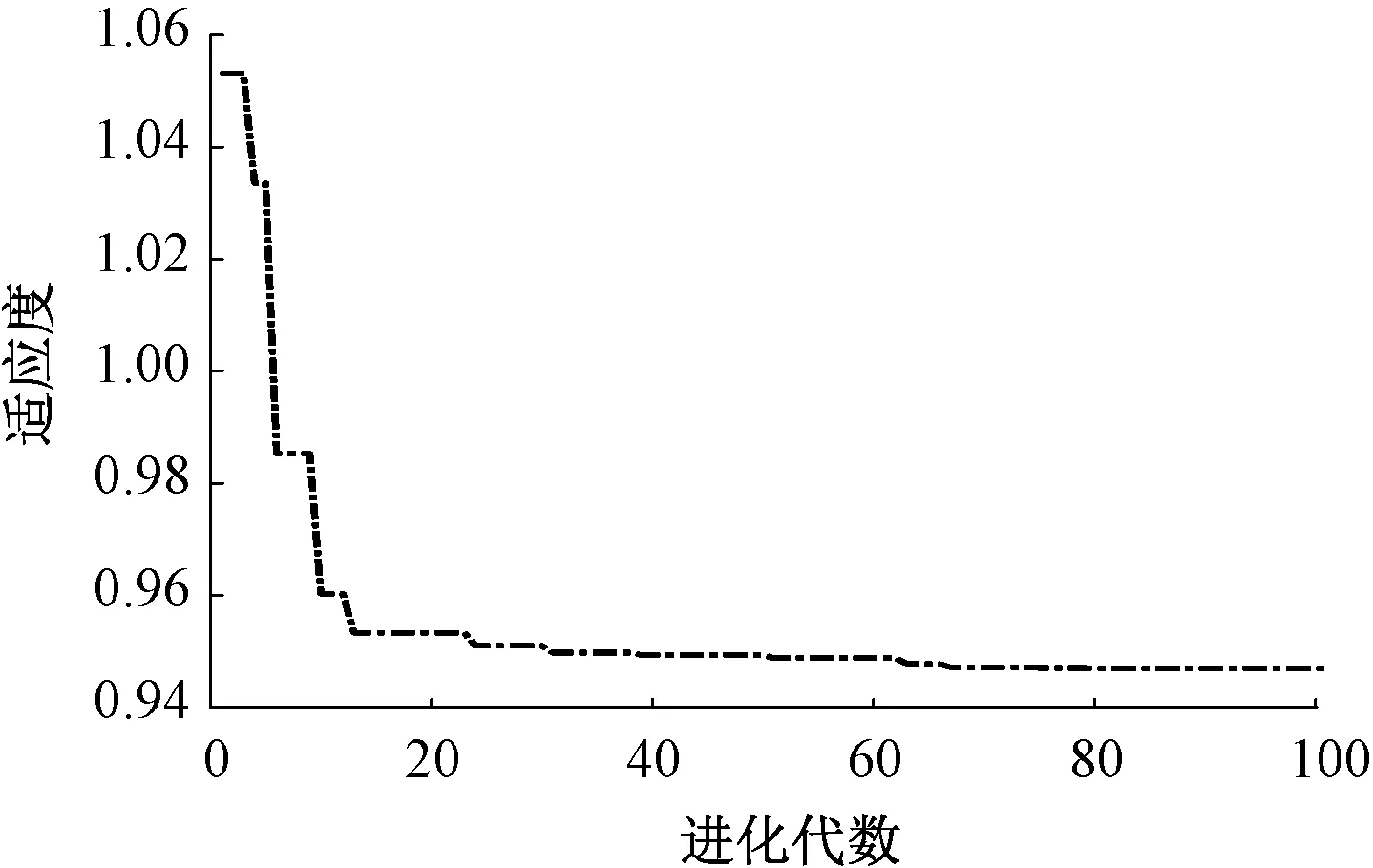
圖14 遺傳迭代尋優(yōu)曲線
為驗證優(yōu)化參數(shù)是否提升了轉(zhuǎn)向架的減振性能,利用建立的C70E貨車剛?cè)狁詈夏P陀嬎阍谧顑?yōu)斜楔參數(shù)下車體垂向和縱向加速度響應(yīng),并與原始斜楔參數(shù)斜楔角度58°、主摩擦系數(shù)0.24、副摩擦系數(shù)0.3下的車體加速度響應(yīng)進行對比。對比結(jié)果如圖15所示,原始參數(shù)下的車體垂向、縱向加速度RMS分別為1.453 8、0.384 0 m/s2;優(yōu)化參數(shù)下的車體垂向、縱向加速度RMS分別為0.668 0、0.297 9 m/s2。從車身的垂向及縱向加速度對比結(jié)果可以看出,車體垂向加速度RMS下降54.1%,縱向下降22.4%,優(yōu)化斜楔參數(shù)下的車體垂向及縱向加速度均有明顯降低,提升了轉(zhuǎn)向架的減振性能。

圖15 車體加速度響應(yīng)
同理為了驗證優(yōu)化參數(shù)是否提升了貨車的運行穩(wěn)定性和安全性,根據(jù)GB 5599—1985《鐵道車輛動力學性能評定和試驗鑒定規(guī)范》[19]采用脫軌系數(shù)和輪重減載率作為評定指標,利用建立的C70E貨車剛?cè)狁詈夏P?對裝備具有優(yōu)化參數(shù)斜楔和原始參數(shù)斜楔的C70E貨車的運行穩(wěn)定性進行對比分析,對比結(jié)果如圖16所示,貨車的脫軌系數(shù)和輪重減載率均有所降低,驗證了本文斜楔參數(shù)優(yōu)化方法的可行性與合理性。

圖16 貨車脫軌系數(shù)和輪重減載率
4 結(jié)論
針對轉(zhuǎn)向架斜楔參數(shù)優(yōu)化難題,提出結(jié)合貨車剛?cè)狁詈夏P汀⑦z傳算法和BP神經(jīng)網(wǎng)絡(luò)的方法實現(xiàn)了對斜楔參數(shù)的優(yōu)化,本文的主要創(chuàng)新點如下:
(1)提出斜楔等效作用法處理斜楔模型,采用該方法處理斜楔的貨車模型模態(tài)特征與非線性臨界速度均與實際情況相近,驗證了該方法處理斜楔的可行性與準確性。與建立斜楔實體模型的方法相比,計算不同斜楔參數(shù)下的車體響應(yīng)更便捷,更利于使用數(shù)據(jù)驅(qū)動的方法對斜楔參數(shù)進行優(yōu)化設(shè)計。
(2)提出利用貨車剛?cè)狁詈夏P吞崛∷钄?shù)據(jù),采用BP神經(jīng)網(wǎng)絡(luò)和遺傳算法建立斜楔參數(shù)與車體響應(yīng)的數(shù)據(jù)驅(qū)動模型,并據(jù)此實現(xiàn)對斜楔參數(shù)優(yōu)化的方法。利用該方法在一定合理參數(shù)選擇范圍內(nèi),找到使車體垂向及縱向加速度響應(yīng)RMS之和最小的斜楔參數(shù);與原始參數(shù)相比,優(yōu)化參數(shù)下貨車車體垂向加速度RMS下降54.1%,縱向下降22.4%,提升了轉(zhuǎn)向架的減振性能;同時貨車脫軌系數(shù)和輪重減載率也均有所下降,提高了貨車的運行穩(wěn)定性和安全性,該參數(shù)優(yōu)化方法為斜楔參數(shù)設(shè)計提供了新的優(yōu)化思路。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
房地產(chǎn)導刊(2022年5期)2022-06-01 06:20:14
建材發(fā)展導向(2021年12期)2021-07-22 08:06:48
建材發(fā)展導向(2021年7期)2021-07-16 07:07:52
中學生數(shù)理化(高中版.高二數(shù)學)(2021年12期)2021-04-26 07:43:48
中學生數(shù)理化·七年級數(shù)學人教版(2020年10期)2020-11-26 08:24:50
哈爾濱鐵道科技(2020年4期)2020-07-22 02:22:28
數(shù)學物理學報(2020年2期)2020-06-02 11:29:24
制造技術(shù)與機床(2019年12期)2020-01-06 03:17:46
西南交通大學學報(2018年5期)2018-11-08 10:58:26
