純電動裝載機整車控制策略及仿真研究
2023-10-31 15:05:06盧照昕景一佳鄭中山
建筑機械化 2023年9期
盧照昕,景一佳,鄭中山,江 帥
(1.中鐵工程裝備集團有限公司,河南 鄭州 450016;2.河南牧業經濟學院,河南 鄭州 450046)
1 純電動裝載機系統構成
目前市場上純電動裝載機的技術路線主要有2 種,一種是雙電機驅動,電機一作為行駛驅動電機,電機二作為工作系統電機;另一種技術路線是三電機驅動,電機一和電機二作為行駛驅動電機,電機三作為工作系統電機。電機都采用永磁電機或開關磁阻電機,因各方案的側重方向和實施對象不同,各有優缺點。本項目涉及純電動裝載機整車控制策略及仿真應用,選擇具有較廣泛適用度的雙電機驅動方案(圖1)。
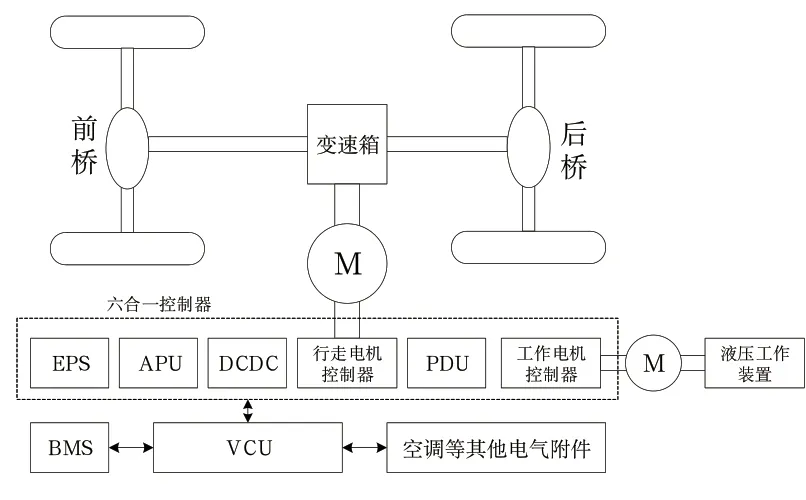
圖1 雙電機驅動技術路線動力構型圖
2 純電動裝載機系統構成
純電動裝載機與內燃機裝載機相比,力學過程本質上相同,區別在于采用不同的動力源。根據某廠家內燃機6t 裝載機動力系統性能參數確定純電動裝載機整車動力匹配參數、電源系統和電子電氣架構。
2.1 電機匹配
裝載機工作時電動機消耗主要體現在行走和液壓工作所需功率,行走電機所需功率按照裝載機滿載工作時額定驅動力Ft所需額定功率Pe和峰值功率Pm確定,即
式中:Ft為驅動力;Ff為滾動阻力;Fw為空氣阻力;Fi為坡度阻力;Fj為加速阻力。
根據滿載時的最高車速(40km/h)和持續爬坡度(30°)計算整車所需的額定功率Pe,即
式中:G為滿載裝載機重量,N;f為滾動阻力系數,N/kN;um為最高車速,km/h;CD為空氣阻力系數;A為迎風面積,m2;θ為持續爬坡度;uic為持續爬坡時的車速,km/h。
裝載機行走電機的額定功率Pe取Pve和Pie的最大值。
裝載機行走電機的轉速匹配和扭矩匹配根據式(4)和式(5)計算
式中:r為車輪半徑,m;nm為電機峰值轉速,r/min;Tmax為最大扭矩,Nm;Pmax為最大功率,kW。
純電動裝載機液壓工作電機功率
式中:PA為工作液壓泵的輸出壓力,MPa;Q為工作液壓泵的流量,L/min;?b為工作液壓泵效率。
根據上述理論可計算出純電動6t 裝載機的行走電機和工作電機參數如表1 所示。

表1 純電動裝載機6t裝載機動力參數
2.2 動力電池匹配
動力蓄電池包的電量是影響純電動裝載機工作時間的決定性因素,按照續航時間5h,充電時間1h 的工況要求計算動力蓄電池匹配參數。
電池容量C(單位Ah)可根據式(7)計算
式中:P為工作電機和行走電機的總功率;t為單次可持續工作時間;U為電池的額定電壓。
根據裝載機工況的不同,電池的峰值功率為
綜上所示,本項目純電動裝載機電壓平臺579.6V,電池電量351kWh。
3 純電動裝載機整車模型搭建
3.1 整車控制策略研究
整車控制策略是純電動工程機械的核心技術,其優劣直接影響整車的動力性、經濟性等性能。本項目將6t 純電動裝載機的控制策略細分為上下電控制、換擋控制、加速踏板控制、動臂控制、翻斗控制等16 項控制功能,各策略如下。
1)上電控制策略 空擋并且4 個先導壓力傳感器壓力值低于2bar 時才能啟動。整車控制器(Vehicular Communication Unit,VCU)檢測到ON 信號,各核心部件開始自檢,若有故障,VCU將故障碼、故障等級、故障節點轉發至儀表顯示,若無故障,VCU 發送上高壓電指令給BMS,BMS 接收到指令后,自檢無故障后閉合電池箱內繼電器并反饋接觸器狀態,電池上高壓完成。
2)下電控制策略 VCU 檢測到ON 信號消失后,VCU 依次切斷各個附件,VCU 接收到各執行單元停機狀態后,發送接觸器斷開指令,整車完成下電。
3)加速踏板控制策略 VCU 檢測到油門踏板信號,控制行走電機轉速。當油門減小時,進行再生制動(滑行回饋)。
4)換擋控制策略 VCU 檢測換擋手柄輸出的24V+信號判斷司機擋位需求。掛F 擋條件:靜態時,在剎車被踩下時允許掛F 擋,否則變速箱不會進入擋位;換N 擋條件:任何條件下,R擋和F 擋與N 擋可以直接切換;換R 擋條件:靜態時,在剎車被踩下時允許掛R 擋,否則變速箱不會進入擋位。
5)行車制動控制策略 剎車燈亮;反饋制動踏板踩下幅度信號,作為制動能量回收信息輸入,控制能量回收程度;靜態時,作為F 擋和R換擋的判斷條件。
6)駐車制動控制策略 顯示器手剎燈亮;半坡啟動-實現坡道輔助;手剎未釋放進行行駛,VCU 發送信息,增加蜂鳴報警。
7)動臂舉升下降控制策略 當VCU 檢測到動臂舉升或下降,壓力傳感器的壓力值對應不同的轉速,0~4bar 時,控制液壓電機轉速為800rpm;4~10bar 時,控制液壓電機轉速為800~1 500rpm線性變化;10~20bar 時,控制液壓電機轉速為1 500~2 300rpm 線性變化。
8)翻斗裝卸控制策略 當VCU 檢測到鏟斗裝卸壓力傳感器的壓力值對應不同的轉速,0~2bar 時,控制液壓電機轉速為800rpm;2~10bar 時,控制液壓電機轉速為800~1 500rpm線性變化;10~25bar 時,控制液壓電機轉速為1 500~2 300rpm 線性變化。
9)轉向控制策略 液壓電機怠速800rpm。
10)多態選擇控制策略 VCU 收到顯示器模式信號,根據設定扭矩上限值控制行走電機。
11)模式選擇控制策略 VCU 收到顯示器模式信號,根據設定響應時間參數,控制行走電機。
12)倒車限速控制策略 在READY 條件下,在倒擋狀態,限制車速不超過16km/h。
13)最高車速限制控制策略 在READY 條件下,在前進狀態下,限制車速不超過40km/h。
14)手剎限功率控制策略 啟動過程及行車過程中,接收到手剎信號,驅動電機限功至50%。
15)充電過程互鎖控制策略 充電過程中,BMS檢測充電槍連接狀態并通過CAN報文發出,若充電槍未拔出,VCU 控制主接觸器不能吸合,另VCU 采集到充電槍連接狀態后,不發送扭矩。
16)故障管理策略 根據電機控制器以及BMS 發出的故障信息進行等級處理以及整車控制器進行環境及各個傳感器的運行狀態進行故障判定。故障等級分為三級,一級故障儀表顯示預警VCU 不做處理,二級故障整車進入跛行,三級故障整車在車速接近零的時候開始進入下電流程。
3.2 軟件應用層架構設計
整車控制器是裝載機的核心控制部件,它采集加速踏板、換擋手柄、制動踏板、翻斗操作手柄、臂架操作手柄等數字信號或模擬信號,接收電池管理系統(Battery Management System,BMS)、變速箱控制單元(Transmission Control Unit,TCU)、電機控制單元(Motor Control Unit,MCU)、中控屏等各個子系統發送的數據信息,對接收到的數據信息按照控制策略進行解析和診斷,并發送相應的指令控制下層的執行機構。隨著電子信息技術的發展,整車控制器的集成度越來越高,功能越來越強大。此項目的電動裝載機采用雙電機技術方案,根據IO 口數量和通訊要求,整車控制器采用Hip-ECU4000,微三核32 位控制器,具有4 路CAN、1 路RS232、2 路RS485 通訊和1 路車載以太網,支持Simulink 的應用層模型式開發,可以使用VCT工具完成一鍵生成HEX文件。
整車CAN 網絡拓撲如圖2 所示。整個應用層模型由任務調度、信號輸入采集、控制策略模塊、信號輸出4 個主要模塊組成。任務調度模塊是按照設計要求,將模型分為不同時間周期的調度任務,最快周期為10ms,最大1 000ms,分為輸入任務調度和輸出任務調度。信號輸入模塊主要分為CAN 信號輸入采集和硬線輸入信號采集。控制策略模塊主要根據采集的信號判斷車輛信息,進行車輛狀態判斷,實現上下電、扭矩請求、扭矩協調、電氣附件管理和故障判斷處理功能。信號輸出模塊主要實現不同調度周期的CAN信號發送和硬線驅動信號輸出功能。
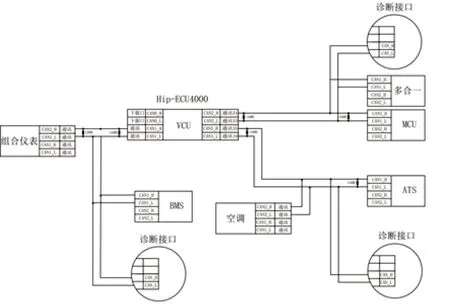
圖2 純電動裝載機CAN拓撲圖
3.3 純電動裝載機控制策略搭建
在Simulink 環境下搭建純電動裝載機整車控制策略模型,包括狀態機模塊、駕駛員扭矩請求模塊、高壓系統模塊、低壓電附件模塊、READY模塊和故障判斷模塊。
根據CREO 建立的純電動裝載機三維模型,將Simulink 作為服務器,建立與CREO 之間的聯系,在config.pro 文件中設置路徑,使用multibody 進行控制策略和三維模型的聯合實時仿真,如圖3 所示。
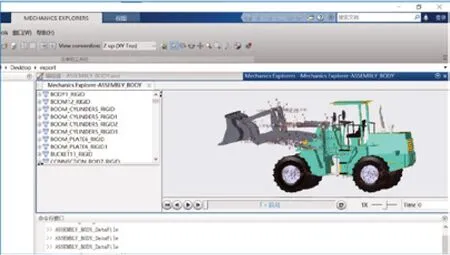
圖3 純電動裝載機CREO與Simulink聯合仿真模型
4 控制策略仿真與測試結果分析
4.1 控制策略仿真
在Simulink 中設置裝載機操作界面(圖4),通過自定義Input 信號,模擬駕駛員操作,動畫演示純電動裝載機可以實現前進、后退、加減速、翻斗鏟卸和臂架升降等基本動作,該模型滿足純電動裝載機開發的基本要求。

圖4 純電動裝載機整機狀態仿真圖
4.2 測試結果分析
通過VCT 工具將整車控制策略Simulink 模型轉換成HEX 文件,燒錄至整車控制器,通過CANOE 監測整車信號狀態,如圖5 所示。純電動裝載機行走電機轉速滿足電機特性曲線,工作電機怠速800rpm,轉速隨負載改變,從實測信號曲線看出,行走電機扭矩符合VCU 扭矩,整車策略符合電控功能需求。

圖5 純電動裝載機電機狀態信號測試圖
5 結論
本文對某6t 純電動裝載機進行研究,通過動力性計算匹配三電系統,在Simulink 中搭建控制策略與CREO三維模型進行聯合仿真,得到結論如下。
1)通過動力性計算得出,行走電機額定轉速1 000rpm,額定扭矩1 200Nm,峰值功率240kW,工作電機額定轉速2 000rpm,額定扭矩500Nm,峰值功率180kW,電壓平臺579.6V,電量351kWh。
2)通過Simulink 和CREO 的聯合仿真與動畫演示,本項目制定的16 項整車控制策略滿足純電動裝載機的電控基本要求。
3)通過試驗測試,裝載機運行平穩,滿足基本工況的使用。通過對比VCU 扭矩指令和實際電機扭矩,也證明了該電動策略的可行性。
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
能源工程(2020年6期)2021-01-26 00:55:22
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
汽車維修與保養(2019年7期)2020-01-06 03:30:42
山東冶金(2019年3期)2019-07-10 00:54:04
消費導刊(2018年10期)2018-08-20 02:57:02
電子制作(2018年11期)2018-08-04 03:25:42
汽車維護與修理(2016年10期)2016-07-10 08:17:41
通信電源技術(2016年1期)2016-04-16 04:57:26
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
