風(fēng)電場大容量風(fēng)電機組永磁直驅(qū)發(fā)電機穩(wěn)態(tài)運行參數(shù)動態(tài)優(yōu)化
2023-10-30 00:57:00程云強邊晉發(fā)陳曉星高永軍馬俊仁
水力發(fā)電 2023年10期
程云強,邊晉發(fā),陳曉星,高永軍,曹 鋒,馬俊仁
(山西大唐嵐縣清潔能源有限公司,山西 太原 030006)
0 引 言
風(fēng)力發(fā)電是一種可持續(xù)的無污染能源,它不僅可以緩解全球能源危機,還可以實現(xiàn)低碳環(huán)保,在新能源的開發(fā)和應(yīng)用以及能源結(jié)構(gòu)的轉(zhuǎn)變和轉(zhuǎn)變中起著關(guān)鍵作用,是全球發(fā)展速度最快的一種重要能源方式。在我國陸上風(fēng)電產(chǎn)業(yè)中,大容量風(fēng)電機組永磁直驅(qū)發(fā)電機已被廣泛使用。由于永磁直驅(qū)發(fā)電機在并網(wǎng)過程中的動態(tài)隨機性,使風(fēng)電機組的電力輸出不斷變化,嚴(yán)重影響了發(fā)電機穩(wěn)態(tài)運行。為了提高電能質(zhì)量,提高發(fā)電效率,有效地保證風(fēng)力發(fā)電機穩(wěn)態(tài)運行已然成為研究的重點。文獻(xiàn)[1]設(shè)計一種灰色PID控制器,通過計算風(fēng)電機灰色預(yù)測值,將基準(zhǔn)值與參考值誤差帶入PI控制器,采用調(diào)節(jié)脈沖信號實現(xiàn)風(fēng)力發(fā)電機運行參數(shù)優(yōu)化。然而該方法容易受到外部環(huán)境因素隨機性的影響,無法對參數(shù)數(shù)據(jù)實時跟蹤監(jiān)測,導(dǎo)致輸出電壓幅值波動較大,實際優(yōu)化效果沒有達(dá)到明顯提升。文獻(xiàn)[2]提出非奇異端滑模控制優(yōu)化方法,通過設(shè)計變結(jié)構(gòu)滑模面求取滑模控制率參數(shù),針對發(fā)電機抖振擾動特性進(jìn)行實時預(yù)估和數(shù)值補償,使風(fēng)電機組運行更具穩(wěn)定性。然而這種方法存在較高的復(fù)雜性,收斂時間耗時較長,在實際應(yīng)用中較少使用。為此,本文提出一種風(fēng)電場大容量風(fēng)電機組永磁直驅(qū)發(fā)電機穩(wěn)態(tài)運行參數(shù)動態(tài)優(yōu)化方法,提高關(guān)鍵參數(shù)收斂精度,從而達(dá)到風(fēng)電機組最優(yōu)運行狀態(tài)。
1 大容量風(fēng)電機組永磁直驅(qū)發(fā)電機結(jié)構(gòu)與動態(tài)參數(shù)抓取
隨著電力需求的增長和電力系統(tǒng)規(guī)模的擴大,我國風(fēng)力發(fā)電設(shè)備逐漸趨于大型化發(fā)展[3],市場對大容量風(fēng)電機組永磁直驅(qū)發(fā)電機(Permanent magnet direct drive generator,PMDDG)的需求與日俱增,提高風(fēng)電機組容量和發(fā)電效率等方面的市場需求[4],將繼續(xù)推動我國風(fēng)電機組朝著大功率發(fā)電方向發(fā)展。
由于風(fēng)電機組日漸大容量化,傳統(tǒng)發(fā)電機中的齒輪箱在工作過程中極易產(chǎn)生過載和磨損現(xiàn)象[5],導(dǎo)致風(fēng)電機組發(fā)生故障,影響系統(tǒng)的穩(wěn)態(tài)運行。PMDDG采用慢速永磁發(fā)電,免去齒輪箱等構(gòu)件,通過發(fā)電機與風(fēng)輪耦合直接驅(qū)動,使發(fā)電機組的運行和維護更加簡化[6],提高了系統(tǒng)的穩(wěn)態(tài)性能。
1.1 風(fēng)能永磁發(fā)電機機組結(jié)構(gòu)
PMDDG機組系統(tǒng)由風(fēng)輪機、濾波器、斷路器、換流器、電流控制器、永磁直驅(qū)發(fā)電控制系統(tǒng)等部件構(gòu)成,機組結(jié)構(gòu)如圖1所示。
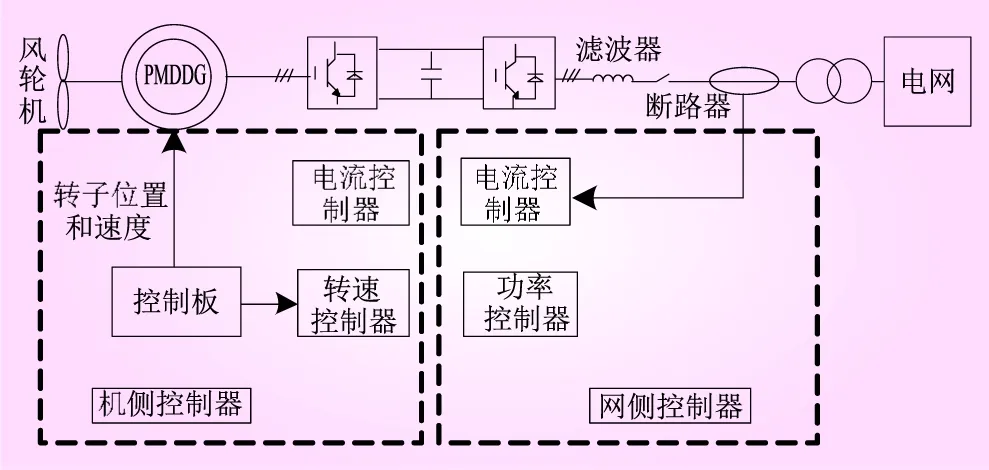
圖1 PMDDG機組結(jié)構(gòu)示意
1.2 風(fēng)能永磁發(fā)電機關(guān)鍵參數(shù)抓取
由于系統(tǒng)受到外部環(huán)境因素影響[7],導(dǎo)致電力輸出波動性較大,為了保持系統(tǒng)的穩(wěn)態(tài)運行,需要對關(guān)鍵參數(shù)進(jìn)行抓取[8],并利用這些參數(shù)對風(fēng)電機組運行狀態(tài)進(jìn)行實時跟蹤分析。
構(gòu)建PMDDG機組電壓模型為
(1)
式中,ud、uq分別為軸向電壓;id、iq分別為軸向電流;Rs為定子電阻;ψd、ψq分別為軸向磁鏈。
將式(1)進(jìn)行離散化,得到動態(tài)參數(shù)抓取模型
Te=(3/2)P[ψg+(Ld-Lp)idip]
(2)
式中,Te為定子轉(zhuǎn)矩;ψg為永磁電磁鏈;Ld、Lq分別為軸向電感。
PMDDG關(guān)鍵參數(shù)的選擇要綜合考量直流外環(huán)的動態(tài)響應(yīng)與穩(wěn)態(tài)性能[9],影響其主要因素是電壓環(huán)帶寬頻率值,因此本文分別對電磁轉(zhuǎn)矩與電壓環(huán)帶寬進(jìn)行控制分析,判斷這兩個因素對穩(wěn)態(tài)耦合特性的影響。
2 大容量PMDDG機組關(guān)鍵參數(shù)優(yōu)化
2.1 基于PID控制的風(fēng)能永磁發(fā)電機轉(zhuǎn)矩參數(shù)動態(tài)優(yōu)化
PID控制器是一種傳統(tǒng)的控制方式[10],它能通過對被控對象的誤差特征進(jìn)行比例、積分、微分等運算,從而獲得控制參量[11],減小穩(wěn)態(tài)偏差,使一個轉(zhuǎn)矩控制周期內(nèi)實際觀測的電磁轉(zhuǎn)矩達(dá)到理想值。PID控制架構(gòu)如圖2所示。
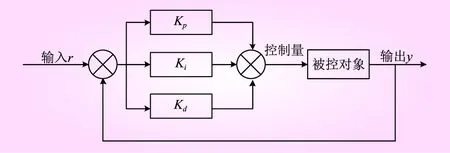
圖2 PID控制架構(gòu)示意
將實際轉(zhuǎn)矩與基準(zhǔn)轉(zhuǎn)矩的之差輸入PID控制器得到輸出轉(zhuǎn)矩[12],將輸出轉(zhuǎn)矩與轉(zhuǎn)矩測量值的偏差數(shù)值輸入控制系統(tǒng),計算出滿足消除轉(zhuǎn)矩波動的基準(zhǔn)電壓,經(jīng)逆變器調(diào)節(jié)驅(qū)動電機運行。
將電流量消除,簡化后得出電磁鏈離散化公式
(3)
式中,ψd(t)、ψq(t)分別表示當(dāng)下時間軸向磁鏈;ψd(t+1)、ψq(t+1)分別表示未來時間軸向磁鏈;ud(t)、uq(t)分別表示當(dāng)下時間軸向電壓;ψg(t)表示當(dāng)下時間永磁體磁鏈;Kr表示整個控制周期。
對轉(zhuǎn)矩進(jìn)行推算且使其離散化
式中,Te(t+1)為當(dāng)下時間的電磁轉(zhuǎn)矩;Te(t)為未來時間的電磁轉(zhuǎn)矩。
將式(5)化簡得出q軸當(dāng)下時間定子參考電壓為
(6)
為使整個控制時間范圍內(nèi)轉(zhuǎn)矩誤差得到滿意控制效果,對未來時間磁鏈波動值進(jìn)行推導(dǎo)
ψg(t+1)2=ψd(t+1)2+ψq(t+1)2
(7)
得到d軸當(dāng)下時間定子參考電壓為
基于PID控制方法減少了參數(shù)計算數(shù)量[13],使整個控制過程更加便捷,直接求出坐標(biāo)軸向參考電壓,減小PMDDG在控制時間范圍內(nèi)的轉(zhuǎn)矩偏差,降低了PMDDG運行時的轉(zhuǎn)矩波動,提高系統(tǒng)動態(tài)響應(yīng)能力。
通過PID控制可以有效實現(xiàn)PMDDG轉(zhuǎn)矩參數(shù)動態(tài)優(yōu)化,但關(guān)鍵參數(shù)中還包含電壓帶寬穩(wěn)態(tài)參數(shù),因此需要引用目標(biāo)函數(shù)進(jìn)行進(jìn)一步優(yōu)化。
2.2 電壓帶寬穩(wěn)態(tài)參數(shù)優(yōu)化控制函數(shù)
電力系統(tǒng)中,用來體現(xiàn)優(yōu)化目的性能指標(biāo)被稱作目標(biāo)函數(shù)。為了使PMDDG穩(wěn)定運行,以電壓穩(wěn)態(tài)輸出為參數(shù)優(yōu)化的目的,設(shè)立目標(biāo)函數(shù)為電壓幅值,影響電壓幅值穩(wěn)態(tài)的目標(biāo)函數(shù)變量為電壓帶寬動態(tài)參數(shù)。傳統(tǒng)的電壓幅值控制穩(wěn)壓策略[14],以在磁場定向控制為基礎(chǔ),引入電壓值反饋,直流機側(cè)電壓額定數(shù)值與反饋數(shù)值的偏差值作為電壓外環(huán)控制器的調(diào)節(jié)參數(shù),輸出為電流環(huán)的電機電流驅(qū)動信號[15]。此外,將電壓環(huán)解耦后等值為一階慣性環(huán)節(jié),與傳統(tǒng)電壓環(huán)中以電壓命令和電壓取樣反饋信號的偏差數(shù)據(jù)作為控制器輸入的方法相比,此處利用電壓平方項的偏差數(shù)據(jù)作為調(diào)節(jié)參數(shù),省去了控制環(huán)內(nèi)的非線性環(huán)節(jié),是電壓環(huán)帶寬參數(shù)整定的基礎(chǔ)。
假設(shè)控制效率為kn,可得到發(fā)電系統(tǒng)額定電壓控制的開環(huán)目標(biāo)函數(shù)為
uo=knki[(s+ki)/s][ωb/(s+ωb)]
(9)
式中,ki為積分因數(shù);ωb為電壓環(huán)帶寬;s為PMDDG運行時的平均功率。
可得到發(fā)電系統(tǒng)額定電壓控制的閉環(huán)目標(biāo)函數(shù)為
uc=uo/[n+uo(s)]=(2knkikp/c)(s/ki+n)/
[s/ωb+s2+2knkp/c]s+2knkikp/c
(10)
式中,kp為比例因數(shù),在電壓幅值調(diào)節(jié)時的截止頻率到電壓環(huán)帶寬頻率范圍內(nèi),積分因數(shù)可以忽略。
比例增益的計算公式為
當(dāng)截止頻率為電壓帶寬的其中一個階段,此時的積分增益表達(dá)公式為
ki=ωb/5
(12)
通過對電壓帶寬動態(tài)參數(shù)的控制,實現(xiàn)了電壓幅值目標(biāo)函數(shù)的優(yōu)化,將比例控制策略與積分控制策略相融合,根據(jù)輸出電壓幅值實時變化調(diào)整控制參數(shù),達(dá)到設(shè)計優(yōu)化、控制優(yōu)化的目的。既能實現(xiàn)控制系統(tǒng)的快速響應(yīng),又能消除PMDDG運行系統(tǒng)的穩(wěn)態(tài)誤差。同時減少了外界因素變化對電壓幅值的影響,提高了系統(tǒng)的穩(wěn)定性。
在引用目標(biāo)函數(shù)算法基礎(chǔ)上,完成電壓帶寬穩(wěn)態(tài)參數(shù)優(yōu)化控制,為了防止動態(tài)參數(shù)解耦陷入局部最優(yōu)解,需要求取已經(jīng)優(yōu)化控制的參數(shù)全局最優(yōu)解。
2.3 基于人工蟻群算法(AACO)的全局參數(shù)動態(tài)優(yōu)化
蟻群算法(ACO)是螞蟻在尋找食物來源的過程中,會隨機地選擇一條路線,即使沒有明顯的引導(dǎo),它們也能根據(jù)不同的情況找到最短的路線。與此同時,為了實現(xiàn)與同伴的信息交流,螞蟻會向自己的周圍釋放一種特殊的外激素,這種外激素由螞蟻自身釋放,它們能夠感應(yīng)到目前地表的外激素含量,并且向其移動。整個過程一開始是隨機和沒有重復(fù)的,當(dāng)螞蟻發(fā)現(xiàn)了食物,就會用外激素來加強它們與蟻巢的關(guān)聯(lián)度,蟻群之間通過這種信息的互通完成食物的搜索。外激素含量高的路徑對蟻群有較大的吸引力,引導(dǎo)螞蟻在最佳路徑上收斂。
AACO算法是基于對實際蟻群動態(tài)的分析基礎(chǔ)上而產(chǎn)生的,它具有一定的記憶儲存能力,能夠?qū)⑽浵伣?jīng)過的節(jié)點標(biāo)記。這種動態(tài)反饋機制使得更多的螞蟻在蟻巢與食物之間的最短路線上移動,最終整個蟻群都在最佳路線上行進(jìn)。
假設(shè)當(dāng)前螞蟻為x,其移動速度方程為
vx(t+1)=zvx(t)+[qx-mx(t)]+[he-mx(t)]
(13)
式中,t為迭代次數(shù);mx表示螞蟻當(dāng)前坐標(biāo)點;qx表示螞蟻最佳坐標(biāo)點;he表示蟻群中全體螞蟻當(dāng)前最佳坐標(biāo)點;z為權(quán)重系數(shù)。
螞蟻的坐標(biāo)點更新迭代表達(dá)式為
mx(t+1)=mx(t)+vx(t+1)
(14)
為了避免陷入局部最優(yōu),使螞蟻能夠自適應(yīng)地改變初始路徑,擴大食物搜索范圍,得到空間搜索半徑為
式中,mmax為螞蟻坐標(biāo)點上限極值;mmin為螞蟻坐標(biāo)點下限極值。當(dāng)r(t)較大時,螞蟻搜索范圍較大,使得螞蟻離開當(dāng)前范圍搜索更優(yōu)路線;當(dāng)r(t)較小時,確定當(dāng)前螞蟻本次迭代的探索范圍,應(yīng)用自適應(yīng)尋優(yōu)策略,更新螞蟻移動速度方程為
vx(t+1)=zvx(t)+[qx-mx(t)]+[he-mx(t)]+
[r(t)-mx(t)]
(16)
當(dāng)螞蟻的移動速度加快,探索范圍也隨之變大,收斂速度也相應(yīng)地提高。通過擴大搜索空間,構(gòu)建最佳行進(jìn)路線,從而求得全局最優(yōu)解。
根據(jù)以上AACO算法的全局尋優(yōu),能夠在復(fù)雜的搜索空間中進(jìn)行全局的最優(yōu)搜索,實現(xiàn)了永磁直驅(qū)發(fā)電機穩(wěn)態(tài)運行參數(shù)的全局動態(tài)優(yōu)化。
3 實 驗
為了驗證本文提出的風(fēng)電場大容量風(fēng)電機組永磁直驅(qū)發(fā)電機穩(wěn)態(tài)運行參數(shù)動態(tài)優(yōu)化方法的可靠性,進(jìn)行實驗。使用灰色PID控制器優(yōu)化方法、非奇異終端滑模優(yōu)化方法,和本文提出的永磁直驅(qū)發(fā)電機穩(wěn)態(tài)運行參數(shù)動態(tài)優(yōu)化方法進(jìn)行實驗對比。
3.1 實驗參數(shù)設(shè)置
以東北某大型風(fēng)電場風(fēng)電機組為例,風(fēng)電場總?cè)萘繛?8 MW,單機容量為2 MW,布設(shè)9臺風(fēng)電機組,風(fēng)葉輪半徑為55 m,機組通過升壓變壓器升壓到35 kV,標(biāo)準(zhǔn)電壓幅值范圍為0.95~1.05(p.u.),額定風(fēng)速10.5 m/s,定子電阻為0.548 Ω,極對數(shù)18。通過MATLAB仿真系統(tǒng)搭建PMDDG模型進(jìn)行仿真實驗,設(shè)置時間為8 s。
3.2 電壓帶寬參數(shù)穩(wěn)態(tài)性能驗證
分別使用灰色PID控制器優(yōu)化方法、非奇異終端滑模優(yōu)化方法,和本文提出的永磁直驅(qū)發(fā)電機穩(wěn)態(tài)運行參數(shù)動態(tài)優(yōu)化方法進(jìn)行電壓帶寬參數(shù)穩(wěn)態(tài)性能實驗對比。電壓幅值波動對比結(jié)果如圖3所示。
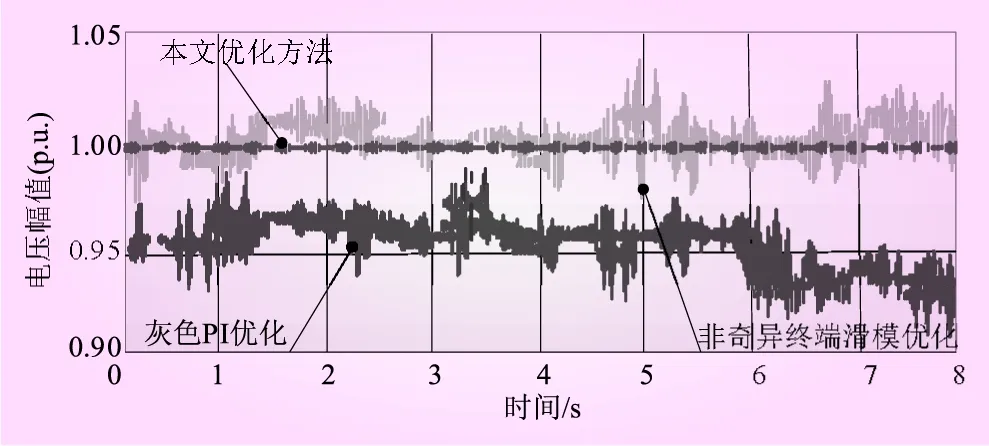
圖3 電壓幅值波動對比結(jié)果
通過圖3可知,基于灰色PID優(yōu)化方法電壓幅值波動在0.92~0.98(p.u.),超出規(guī)定幅值范圍,優(yōu)化效果較差;基于非奇異終端滑模優(yōu)化方法電壓幅值波動在0.97~1.03(p.u.),雖然有一定的優(yōu)化效果,但電壓輸出波形起伏較大,難以滿足穩(wěn)態(tài)運行需求。而本文提出的基于風(fēng)電場大容量風(fēng)電機組永磁直驅(qū)發(fā)電機穩(wěn)態(tài)運行參數(shù)動態(tài)優(yōu)化方法,在仿真時間內(nèi)電壓幅值始終維持在1(p.u.),說明該方法具有較好的電壓穩(wěn)態(tài)輸出效果。
3.3 發(fā)電機轉(zhuǎn)矩參數(shù)控制驗證
為了進(jìn)一步驗證本文研究的優(yōu)化性能,進(jìn)行轉(zhuǎn)矩波動實驗對比。標(biāo)準(zhǔn)轉(zhuǎn)矩波形如圖4所示。
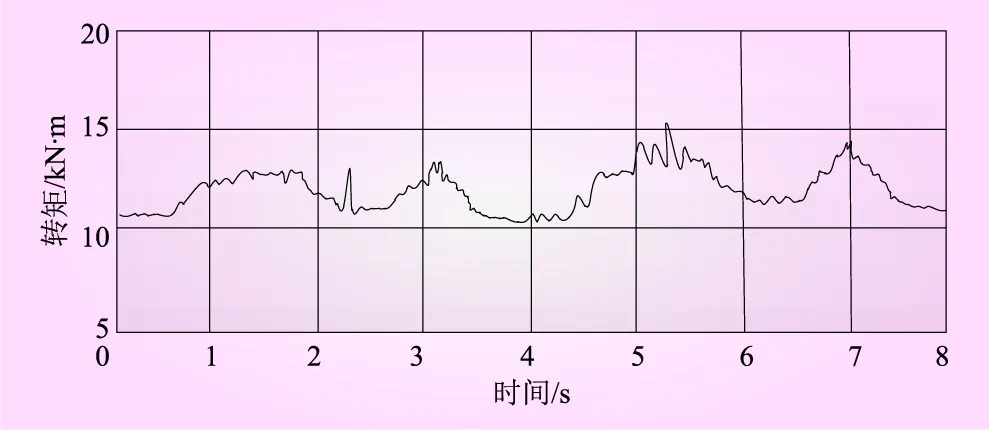
圖4 標(biāo)準(zhǔn)轉(zhuǎn)矩波形
使用灰色PID控制器優(yōu)化方法、非奇異終端滑模優(yōu)化方法,和本文提出的永磁直驅(qū)發(fā)電機穩(wěn)態(tài)運行參數(shù)動態(tài)優(yōu)化方法進(jìn)行實驗對比。轉(zhuǎn)矩波形對比結(jié)果,如圖5所示。
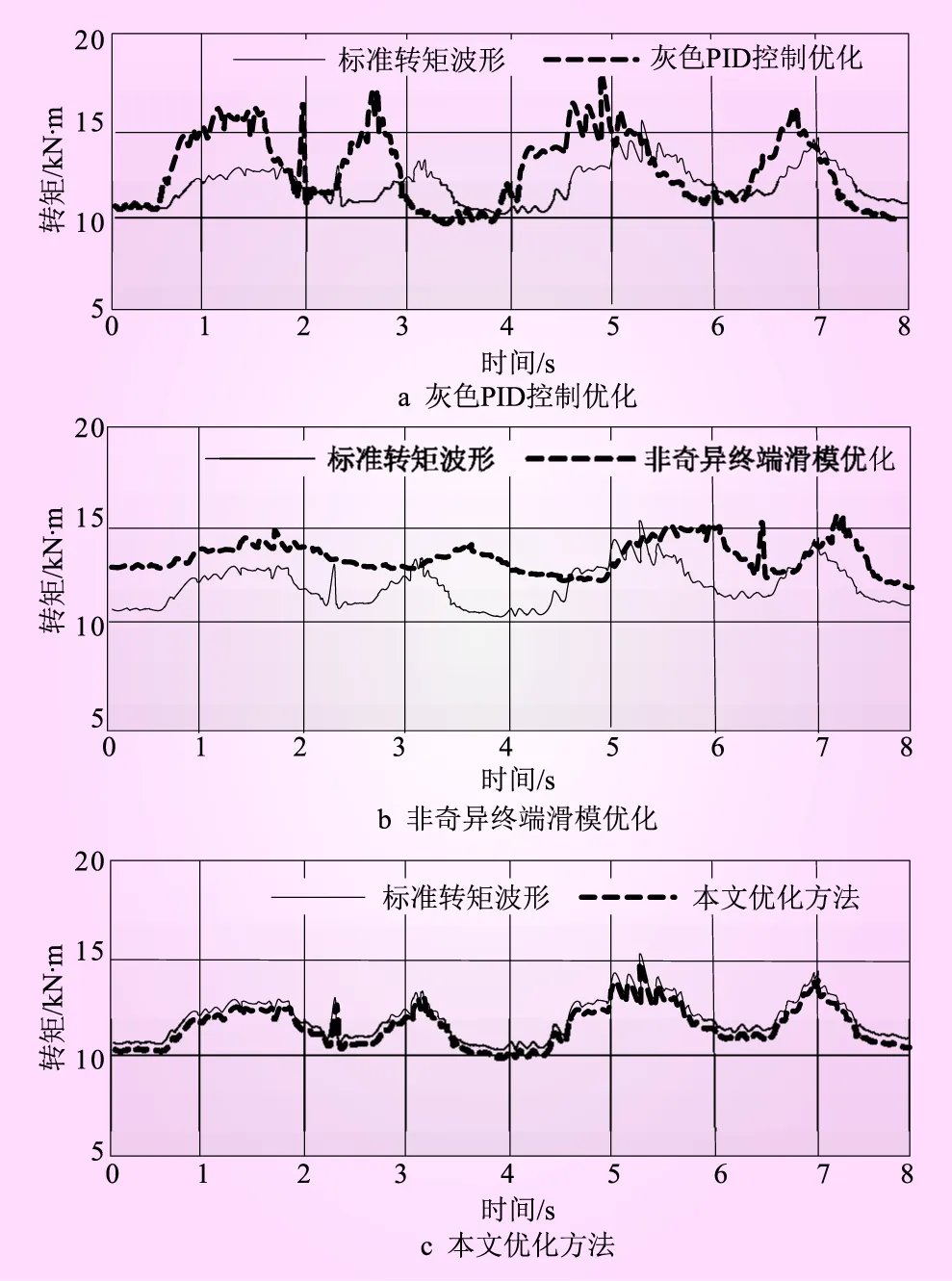
圖5 轉(zhuǎn)矩波形對比結(jié)果
根據(jù)圖5可知,當(dāng)仿真時間運行至2.5 s時,灰色PID控制優(yōu)化方法轉(zhuǎn)矩波形與標(biāo)準(zhǔn)轉(zhuǎn)矩波形最大誤差為3.9 kN·m;當(dāng)仿真時間運行至3.5 s時,非奇異終端滑模優(yōu)化方法轉(zhuǎn)矩波形與標(biāo)準(zhǔn)轉(zhuǎn)矩波形最大誤差為2.5 kN·m;而本文提出的優(yōu)化方法與標(biāo)準(zhǔn)轉(zhuǎn)矩波形擬合度基本一致,最大誤差為0.2 kN·m,穩(wěn)定性極高。
以東北某大型風(fēng)電場為例進(jìn)行仿真實驗,通過實驗對比結(jié)果可以證明,本文方法能夠?qū)Ψ€(wěn)態(tài)運行的關(guān)鍵參數(shù)全面優(yōu)化,有效實現(xiàn)系統(tǒng)穩(wěn)態(tài)運行。
4 結(jié) 論
本文提出一種風(fēng)電場大容量風(fēng)電機組永磁直驅(qū)發(fā)電機穩(wěn)態(tài)運行參數(shù)動態(tài)優(yōu)化方法,通過研究得出如下結(jié)論:
(1)通過對穩(wěn)態(tài)運行動態(tài)參數(shù)進(jìn)行抓取,為實現(xiàn)風(fēng)電機組穩(wěn)態(tài)運行提供數(shù)據(jù)基礎(chǔ)。
(2)采用PID控制器抑制轉(zhuǎn)矩波動,提高系統(tǒng)運行穩(wěn)定性能。
(3)引入目標(biāo)函數(shù)有效實現(xiàn)電壓環(huán)帶寬控制,增強風(fēng)電機組自適應(yīng)能力,實現(xiàn)電壓穩(wěn)定輸出。
(4)利用AACO算法實現(xiàn)參數(shù)動態(tài)全局優(yōu)化,得到理想控制結(jié)果。
猜你喜歡
房地產(chǎn)導(dǎo)刊(2022年5期)2022-06-01 06:20:14
故事作文·高年級(2021年12期)2021-12-21 02:32:35
建材發(fā)展導(dǎo)向(2021年12期)2021-07-22 08:06:48
建材發(fā)展導(dǎo)向(2021年7期)2021-07-16 07:07:52
中學(xué)生數(shù)理化(高中版.高二數(shù)學(xué))(2021年12期)2021-04-26 07:43:48
中學(xué)生數(shù)理化(高中版.高考數(shù)學(xué))(2021年12期)2021-03-08 01:28:50
大電機技術(shù)(2017年3期)2017-06-05 09:36:02
軍事文摘(2016年16期)2016-09-13 06:15:49
智能建筑電氣技術(shù)(2015年5期)2015-12-10 05:52:30
現(xiàn)代企業(yè)(2015年2期)2015-02-28 18:45:09