基于激光雷達的無人駕駛3D 多目標跟蹤
2023-10-30 10:13:20熊珍凱程曉強吳幼冬左志強劉家勝
自動化學報 2023年10期
熊珍凱 程曉強 吳幼冬 左志強 劉家勝
多目標跟蹤 (Multi-object tracking,MOT)技術是自動駕駛感知系統的重要組成部分.一方面,無人駕駛汽車的行駛過程是在時空下的連續運動,無人駕駛的規劃與決策過程大多是基于連續時間序列完成的,因此除了目標的位置信息以外,目標的速度、角速度、加速度等時間關聯特征也同樣重要.另一方面,由于目標檢測本身依據單幀圖像或點云數據完成[1],缺乏目標在時空運動中的上下文信息,因此當光照變化、目標遮擋等情況發生時,往往容易出現目標丟失,這對于決策器和規劃器的穩定運行會產生不利影響.因此,實現可靠的多目標跟蹤意義重大.多目標跟蹤任務可以定義為當傳感器獲得一段時間內的目標數據序列后 (如一系列RGB圖像或3D 點云),實現不同時刻數據幀下同一目標的正確匹配.多目標跟蹤問題需要解決以下問題:1)對不同數據幀中的同一目標,分配唯一的ID 標號,并維持該標號不變;2)對于新出現的目標,分配新的ID 標號,并進行持續跟蹤;3)對已經從傳感器數據中消失的目標,應及時剔除,避免不利影響.
目前多目標跟蹤的方法主要可以分為兩類,分別是端到端 (End to end)方法和基于檢測的跟蹤(Tracking by detection)方法.前者將目標檢測與跟蹤視為一個統一的過程,輸入單幀圖像或點云數據,直接輸出帶有唯一ID 標號的目標檢測框信息;后者則將檢測與跟蹤視為遞進過程,首先使用目標檢測網絡如Complex-YOLO[2],PointRCNN[3]獲得檢測框位置,然后再使用目標在多幀數據中的時空聯系性進行關聯,獲得跟蹤結果.代表方法包括SORT(Simple online and real time tracking)[4]、Deep-SORT (SORT with a deep association metric)[5]和AB3DMOT (A baseline for 3D multi-object tracking)[6].其中AB3DMOT 將2D 多目標跟蹤問題擴展到3D 多目標跟蹤任務,提出了一種簡潔高效的實時多目標跟蹤框架,并在KITTI 數據集上驗證了出色效果,實時性達到了200 幀/s,是3D 多目標跟蹤領域的經典之作.
本文在分析AB3DMOT 跟蹤算法的基礎上,針對原算法中的以下兩點問題進行了研究:1)目標關聯度計算在基于檢測的跟蹤方法中起到了突出作用,原AB3DMOT 算法使用傳統的交并比 (Intersection over union,IoU)作為度量指標,因此存在當兩個檢測框不相交時IoU=0 的問題[7-8],造成匹配失敗;2)目前的MOT 算法中大多都會用到生存周期 (Birth and death memory,BDM)策略,用于降低漏檢率、獲得更好的跟蹤效果,但多采用固定生存周期,對所有目標進行無差別處理,并未考慮檢測結果本身置信度對跟蹤的影響.針對上述問題,本文提出了一種基于邊界交并比 (Border intersection over union,BIoU)度量的自適應多目標跟蹤算法,主要創新點包括:
1)提出了BIoU 度量方法用于計算檢測結果的關聯性矩陣,相比于單一使用歐氏距離或傳統IoU度量的方法,BIoU 可以有效解決無交集和奇點問題,獲得更可靠的多目標跟蹤結果;
2)提出了一種自適應的生存周期管理策略,將檢測結果本身的置信度與生存周期關聯起來,可以有效避免由于遮擋導致的跟蹤失敗和由于誤檢導致的錯誤跟蹤的情況.
基于KITTI 多目標跟蹤數據集[9]進行的實驗表明,本文提出的基于BIoU 和自適應生存周期管理的多目標跟蹤算法,相比于原算法可以有效地提高跟蹤的準確性和魯棒性.
1 研究現狀
1.1 2D/3D 多目標跟蹤任務
多目標跟蹤問題按照跟蹤目標的狀態種類可以分為2D 多目標跟蹤和3D 多目標跟蹤.其中2D 多目標跟蹤主要用于圖像領域的目標跟蹤任務,如安防監控、軍事偵察、自然觀測等領域[10].DeepSORT[5]算法引入馬氏距離度量和級聯匹配用于提高跟蹤精度.Leal-Taixé 等[11]介紹了一種兩階段深度學習跟蹤算法:使用局部時空編碼聚合像素和光流信息,通過梯度增強分類器將圖像上下文特征與CNN 輸出相結合.孟琭等[12]詳細說明了光流法、相關濾波法和深度學習方法在目標跟蹤領域的應用效果.與2D 多目標跟蹤相比,基于點云數據的3D 多目標跟蹤具有較為準確的深度估計,此類方法大多基于運動學模型.Azim 等[13]利用卡爾曼濾波器對獲得的相鄰兩幀激光點云基于八叉樹的占據柵格地圖分析其不一致信息,從而檢測動態物體;再使用全局最近鄰的方法進行數據關聯;最后基于卡爾曼濾波跟蹤動態物體的中心點.Song 等[14]采用一種多任務的稀疏學習算法來選取最佳的候補對象,提高了復雜環境下的跟蹤效果.為了驗證有效的深度估計對目標跟蹤性能的影響,Sharma 等[15]使用基于3D點云校準的2D 圖像進行目標跟蹤,考慮了三維空間信息,有效緩解了基于RGB 圖像中的深度估計不準確和遮擋問題,實現了較好的跟蹤效果.2020 年,Weng 等[6]將2D 跟蹤算法SORT 的思想遷移到3D 點云中,提出AB3DMOT 算法,無需GPU 訓練即可實現優秀的跟蹤性能.
1.2 關聯度量
目標匹配是多目標跟蹤中的重要環節,有效度量預測目標與檢測目標之間的關聯性,是獲得可靠匹配結果的關鍵.常用的匹配方法包括基于外觀顯著性特征的匹配方法[16-17]和基于空間位置相關性的匹配方法[18-19].與2D 圖像相比,3D 點云數據更為稀疏,外觀特征不明顯,因此更常采用空間位置的相關性進行匹配.IoU 和目標間距離是常用的兩種度量方法.SORT[4]和AB3DMOT[6]算法中均使用預測框與檢測框的IoU 值作為關聯度量,再利用匈牙利算法進行匹配.使用原始IoU 進行關聯度量存在兩個問題:1)當預測框與檢測框無交集時IoU=0,此時無法獲得有效的度量信息;2)多個預測框可能與檢測框具有相同的IoU 值,如圖1(a)中的情況.另一種方法是使用目標間距離作為度量指標,如預測框與檢測框中心點之間的歐氏距離[19].但使用距離度量同樣存在不同的預測框與目標框的距離相同的情況.如圖1(b),雖然藍色和紅色表示的兩個預測框差異很大,但它們與檢測框中心的歐氏距離是相同的.近年來,使用深度網絡來學習目標關聯性特征的方法也得到了諸多研究,如Wu 等[18]將Point-RCNN 檢測器得到的特征也作為關聯度量的要素加入度量過程,從而獲得更可靠的度量結果.
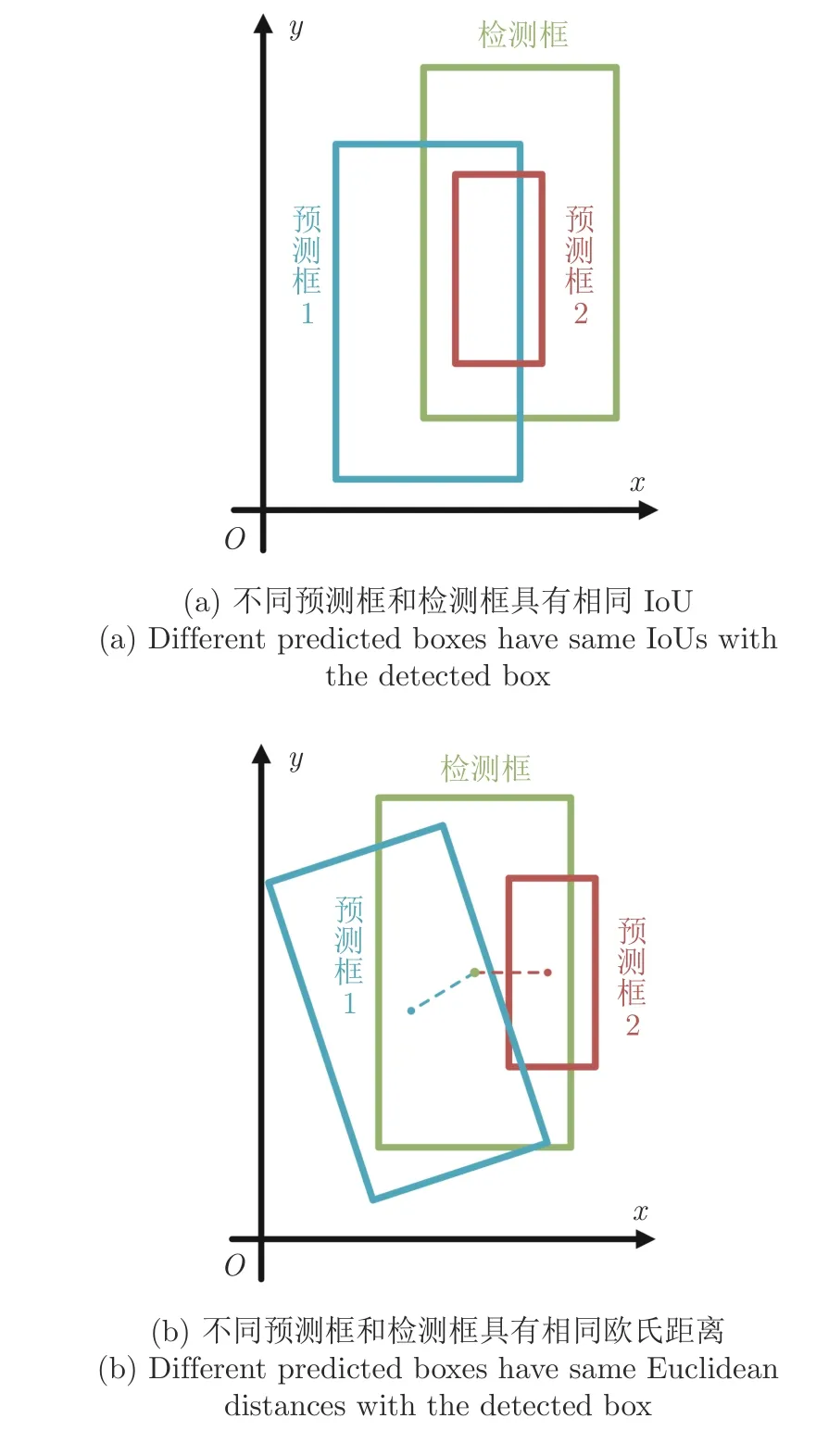
圖1 IoU 度量和歐氏距離度量失效情況Fig.1 Invalid cases about IoU metrics and Euclidean distance metrics
1.3 生存周期管理
在現有的多目標跟蹤算法中,會使用生存周期管理策略[5-6,18].一方面,當出現因為遮擋造成的目標丟失情況時,生存周期管理策略可以保證在一段時間內仍然可以持續跟蹤目標而不會立刻丟失;另一方面,當出現誤檢情況時,由于生存周期管理策略要求目標連續檢測多幀,所以可以有效過濾掉單幀誤檢的目標.目前通常使用的是固定周期的管理策略,即對所有目標進行相同時長跟蹤用于確定目標或刪除目標.而在實際應用中,考慮到目標檢測單元會輸出檢測框的置信度,用于表征檢測結果的可靠性,因此,可以根據置信度對不同目標進行自適應生存周期管理,即:對置信度較高的目標可以保持更長時間以解決遮擋造成的目標漏檢;對置信度較低的目標在發生誤檢后應盡快刪除.
2 基于BIoU 的3D 多目標跟蹤
2.1 問題描述
多目標跟蹤的主要任務是在給定一個圖像序列的前提下,找到圖像序列中待檢測目標,并將不同幀中檢測到的目標進行關聯,得到目標的運動信息,給每一個運動目標一個固定準確的ID 標號.對于3D目標檢測,一方面其天然克服了基于RGB 圖像中的2D 目標檢測的遮擋與目標位置估計不準確的問題,使得基于運動估計的在線跟蹤算法易于應用;另一方面,對于3D 目標檢測的點云數據而言,缺乏類似RGB 圖像那樣豐富的語義特征,導致難以使用特征描述的方式進行跟蹤.因此,AB3DMOT[6]算法僅使用簡單樸素的跟蹤策略就實現了高效實時的目標跟蹤效果.但是,該方法在匈牙利匹配環節中使用原始的3D IoU 作為成本度量,而無人駕駛汽車的多目標跟蹤本質仍然是一種近似的2D 平面運動,其在z軸方向上變化較小,導致目標檢測在z軸方向上的估計將對跟蹤性能產生較大影響,同時由于IoU 度量的局限性,本文提出BIoU 作為一種新的成本度量融入到匈牙利匹配之中.目標的生存周期管理是目標跟蹤的重要環節,生存周期設置過短在目標檢測不穩定時會造成較為頻繁的ID 切換,生存周期過長容易增加錯誤跟蹤和目標誤檢.因此,通過對跟蹤軌跡的置信度打分,本文設計了自適應的生存周期管理機制,動態地調整目標的生存周期減少了ID 切換和目標誤檢,實現了較好的跟蹤性能.
如圖2 所示,本文所提出的3D 多目標跟蹤的整體流程可以分為以下幾個部分:
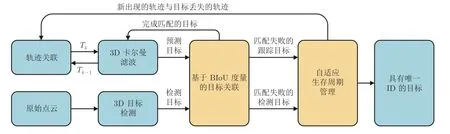
圖2 基于BIoU 和自適應生存周期的3D 多目標跟蹤Fig.2 3D multi-object tracking based on BIoU and adaptive birth and death memory
1)使用3D 檢測器獲得目標檢測框;
2)使用3D 卡爾曼濾波器獲得上一幀的目標預測框;
3)基于BIoU 計算檢測框與預測框的關聯度,使用匈牙利匹配算法獲得最優匹配結果;
4)使用3D 卡爾曼濾波對所有匹配目標進行狀態更新;
5)對未匹配成功的目標進行生存周期管理;6)輸出具有唯一ID 標號的目標邊框.
2.2 卡爾曼濾波
卡爾曼濾波[20]是目前狀態估計應用最為廣泛的估計優化算法,它能夠根據過去的信號信息,利用統計計算的原理,優化最小均方誤差,從而預測出未來的狀態量.卡爾曼濾波是對時間參數估計的最小二乘逼近,能夠建立起狀態變量隨時間變化的方程,從而估計出今后某個時刻的狀態.
卡爾曼濾波算法的核心包括如下幾個方程:
1)描述預測過程中,系統的狀態向量預測方程
其中,A為狀態轉移矩陣,B為控制輸入矩陣,Uk表示k時刻的控制輸入向量,表示k時刻狀態的預測值,Xk-1表示k-1 時刻的狀態輸出值,Wk-1為k-1 時刻的狀態轉移過程中的隨機干擾噪聲,表現為均值為零的高斯白噪聲.
2)描述先驗估計協方差矩陣的更新過程
其中,Q為狀態轉移過程噪聲Wk的協方差矩陣,為k時刻的先驗估計協方差矩陣的預測值.
3)描述觀測模型中由系統觀測值得到系統觀測向量的過程
其中,H為狀態觀測矩陣,Zk為k時刻狀態變量的觀測值,Vk為狀態觀測過程中的隨機干擾噪聲向量,表現為均值為零的高斯白噪聲.
4)卡爾曼濾波增益方程 (權重)
其中,Kk表示k時刻的卡爾曼增益,R為觀測噪聲Vk的協方差矩陣.
5)卡爾曼濾波估計方程 (k時刻的最優狀態估計)
其中,Xk表示k時刻狀態向量經過卡爾曼濾波后的最優估計,是系統的實際輸出值,表現為在預測值的基礎上按照卡爾曼濾波增益疊加一個預測誤差項.
6)卡爾曼濾波協方差估計方程 (k時刻的最優協方差估計)
其中,Pk為k時刻卡爾曼濾波的后驗估計協方差矩陣的預測值.該方程用來描述狀態向量協方差矩陣的變化過程,正是這種不斷更新的機制才能保證卡爾曼濾波不斷克服隨機噪聲的影響.
卡爾曼濾波算法能夠在不準確的測量數據基礎上盡可能地消除噪聲的影響,對真實值做出預測.目標跟蹤算法把跟蹤目標的屬性作為狀態變量,利用卡爾曼濾波器對屬性進行線性濾波,得到更好的預測值.
2.2.1 狀態預測
為了預測上一幀到當前幀的目標狀態,這里使用恒定速度模型估計對象間的幀間位移,將目標狀態表示成一個11 維向量,即
其中,x,y和z分別表示目標的中心點坐標,l,w和h分別表示目標的3D 邊框尺度,θ為目標邊框的航向角,s表示當前軌跡的置信度分數,vx,vy和vz分別為目標在三維空間中沿x,y和z軸方向上的運動速度.
第k-1 幀數據中的所有目標狀態構成的集合表示為
對于k-1 時刻的每個目標狀態都可以給出k時刻的預測狀態.
2.2.2 狀態更新
根據數據關聯的結果,可以將跟蹤目標與檢測目標分為4 類:跟蹤匹配成功、檢測匹配成功、跟蹤匹配失敗和檢測匹配失敗.它們各自的具體形式為
其中,Tmatch和Dmatch表示匹配成功的跟蹤目標與檢測目標,wk表示當前時刻匹配成功的數量,Tunmatch和Dunmatch分別表示匹配失敗的跟蹤目標和檢測目標,mk-1表示上一時刻的所有跟蹤目標數量,nk表示當前時刻的檢測目標數量.完成匹配之后,使用匹配成功的目標Dmatch根據貝葉斯規則更新對應的目標狀態.
2.3 基于BIoU 的匈牙利匹配算法
為了解決傳統IoU 度量或距離度量的失效問題,本文設計了一種結合歐氏距離與IoU 的綜合度量指標,即BIoU 度量,它由原始IoU 和邊界距離懲罰項共同組成,具體形式為
其中,IoU(B1,B2)表示一般意義下的兩個邊界框的交并比,RBIoU為基于邊界歐氏距離的懲罰項,γ是懲罰項因子,分別表示兩個邊界框最小外接框的左上頂點和右下頂點,函數ρ(·)為兩個頂點間的歐氏距離,Cmax(B1,B2)表示兩個邊界框最小外接框的最大對角線距離,用于對邊界距離進行歸一化處理.需要說明的是,采用最小外接框的方法可以弱化旋轉對邊界距離的影響,便于計算邊界距離.圖3(a)展示了2D BIoU 的計算方法.綠色和藍色實線框代表兩個不同的邊界框,虛線框為它們各自的最小外接框,灰色區域表示IoU(B1,B2),紅色線段表示邊界距離黃色線段表示最大對角線距離Cmax(B1,B2).
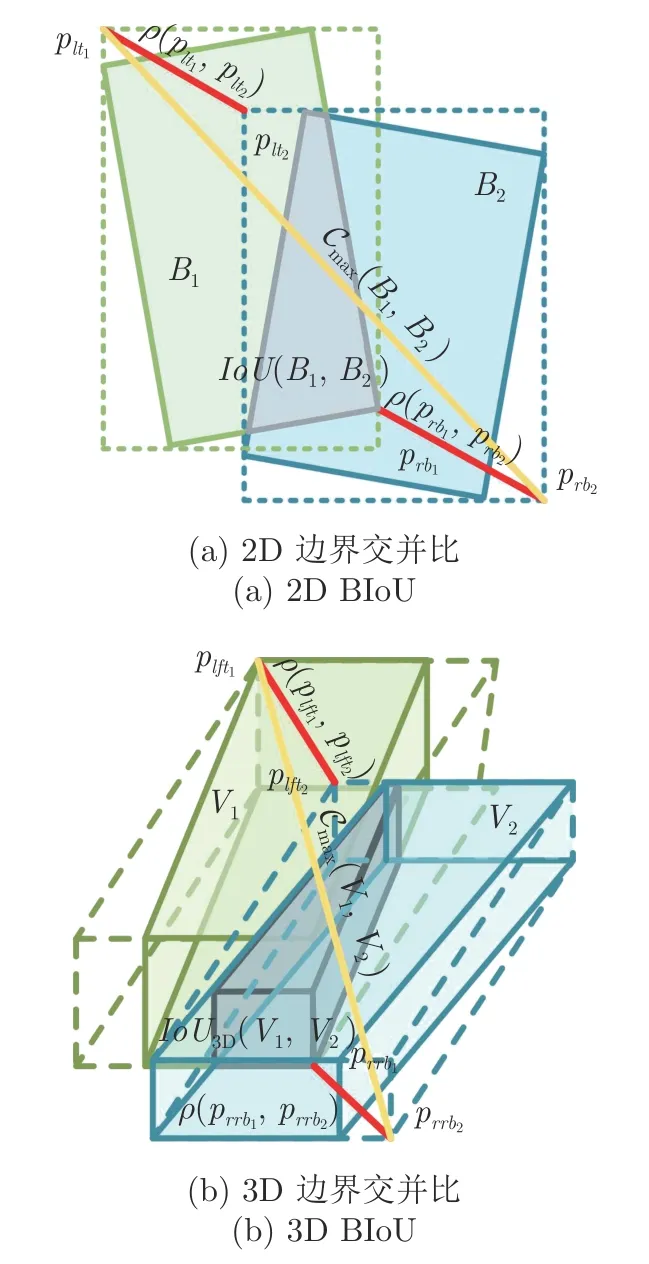
圖3 邊界交并比示意圖Fig.3 Schematic diagram of BIoU
對于3D 多目標跟蹤,本文將上述2D BIoU 的定義擴展到3D 坐標系下,如圖3(b)所示.3D BIoU的計算式為
其中,IoU3D(V1,V2)表示兩個3D 邊界框V1和V2的體積交并比 (圖中的灰色區域),懲罰項與邊界距離相關,分別是兩個3D邊界框最小外接框的左-前-上頂點和右-后-下頂點,ρ(plft1,plft2)和ρ(prrb1,prrb2)分別是對應邊界距離 (圖中的紅色線段),Cmax(V1,V2)則表示兩個最小外接框所有頂點間的最大對角線距離 (圖中的黃色線段).在給定閾值BIoUthres的情況下,當BIoU3D<BIoUthres時,則認為兩個3D 邊界框匹配失敗,即兩個3D 邊界框分別屬于獨立的兩個不同目標.
2.4 自適應生存周期管理策略
在多目標跟蹤中,現有目標會離開視野,也可能有新目標進入視野,因此需要一個模塊來管理軌跡的產生和刪除.生存周期管理是常見的做法:將所有未成功匹配的檢測目標視為潛在的新軌跡,為了避免跟蹤誤報,只有在該目標連續檢測到Fmin幀后才認為是一個新的目標軌跡;將所有未成功匹配的跟蹤目標結果視為即將離開視野的軌跡,為了避免誤刪軌跡,只有該目標未成功匹配Fmax幀后才視為目標丟失并將其刪除.理想情況下,該策略可以保留因為單幀漏檢未能成功匹配的目標軌跡,并僅刪除已經離開視野的目標軌跡.但在實際中,3D 目標檢測器的誤檢和漏檢普遍存在,采用固定的生存周期管理策略,將出現錯誤的跟蹤軌跡.原因主要是固定的生存周期管理策略未有效利用檢測目標的置信度信息,而對所有目標均進行相同周期的檢查操作,從而導致檢測置信度較低的目標 (往往為誤檢目標)也需要跟蹤多幀后才會被刪除,而檢測置信度較高的目標一旦被多幀遮擋 (往往出現漏檢)也可能被刪除.
因此,本文提出一種自適應生存周期管理策略,根據目標檢測結果的置信度,動態調整最大生存周期,具體為
其中,score為當前目標的檢測置信度,α和β為尺度系數和偏移系數,σ(·)表示Sigmoid 非線性函數,Fmax為最大生存周期,FAmax為根據目標檢測置信度計算后的生存周期.通過選取合適的α和β,實現更好的跟蹤效果.圖4 給出了當Fmax=3,α=0.5,β=-5 時生存周期與檢測置信度之間的關系.利用Sigmoid 函數的S 型曲線特性,檢測目標的置信度越高,該目標的生存周期將會越長,從而實現生存周期動態調整.
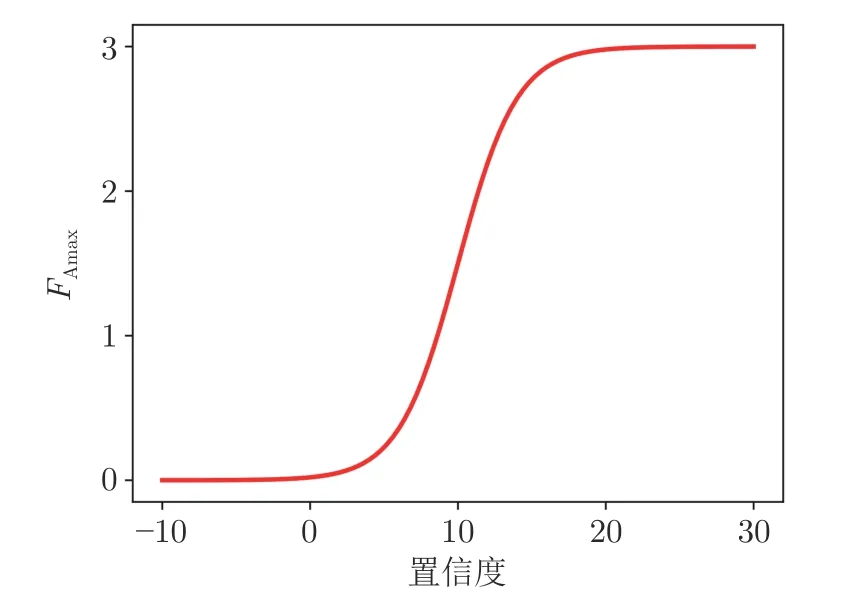
圖4 自適應生存周期Fig.4 Adaptive birth and death memory
3 實驗結果與分析
3.1 數據集與評價指標介紹
本實驗基于KITTI 數據集的多目標跟蹤基準進行評估,該基準由21 個訓練序列和29 個測試序列組成.對于每個序列都提供了LiDAR 點云、RGB圖像以及校準文件.用于訓練和測試的數據幀數分別為8 008 和11 095.對于測試集數據,KITTI 不向用戶提供任何標簽,而是在服務器上保留標簽以進行MOT 評估.對于訓練集數據,含有30 601 個目標和636 條軌跡,同樣包括Car、Pedestrian 和Cyclist類別.由于本文使用的目標跟蹤系統是基于卡爾曼濾波算法的,不需要進行深度學習訓練,因此將所有21 個訓練序列作為驗證集進行驗證.實驗對比了Car、Pedestrian 和Cyclist 全部3 個類別上的多目標跟蹤效果.
對于多目標跟蹤方法,理想的評價指標應當能夠同時滿足3 個要求:1)所有出現的目標都能夠及時被發現;2)找到的目標位置應當盡可能和真實的目標位置一致;3)應當保持目標跟蹤的一致性,避免目標標志的頻繁切換.根據上述要求,傳統的多目標跟蹤將評價指標設置為以下內容:多目標跟蹤準確度 (Multi-object tracking accuracy,MOTA)用于確定目標的個數以及跟蹤過程中的誤差累計,多目標跟蹤精度 (Multi-object tracking precision,MOTP)用于衡量目標位置上的精確度,主要跟蹤軌跡命中率 (Mostly tracked,MT),主要丟失軌跡丟失率 (Mostly lost,ML),身份切換次數 (ID switch,IDS),跟蹤打斷次數 (Fragment,FRAG)等.
3.2 實驗結果
實驗流程如圖5 所示,其中3D 目標檢測器使用與AB3DMOT 算法相同的、已經訓練好的PointRCNN 模型.在目標匹配階段,使用本文提出的BIoU 計算預測框與目標框之間的關聯度,然后使用匈牙利匹配算法進行目標匹配.成功匹配的目標送入卡爾曼濾波器進行狀態更新,未成功匹配的檢測目標和預測目標均送入自適應周期管理模塊進行判定.自適應周期管理模塊根據目標的置信度分數自適應調整目標的最大生存周期,刪除已達到最大生存周期而仍未匹配成功的目標,最終得出具備唯一ID 標號的目標軌跡.BIoU 和自適應生存周期管理中涉及的參數通過整定得到,最終模型使用的參數如表1 所示.
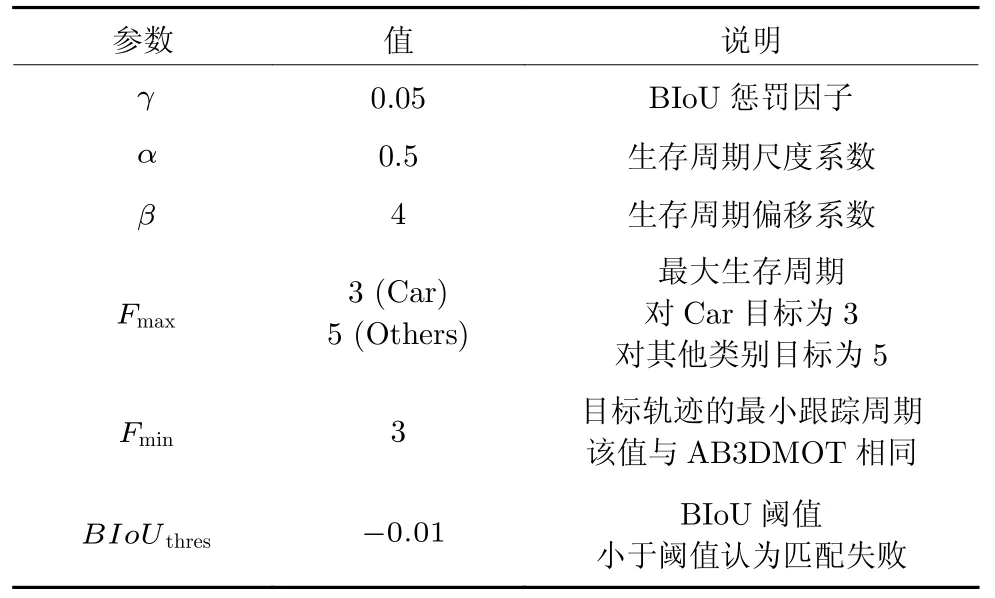
表1 模型參數Table 1 Model parameters
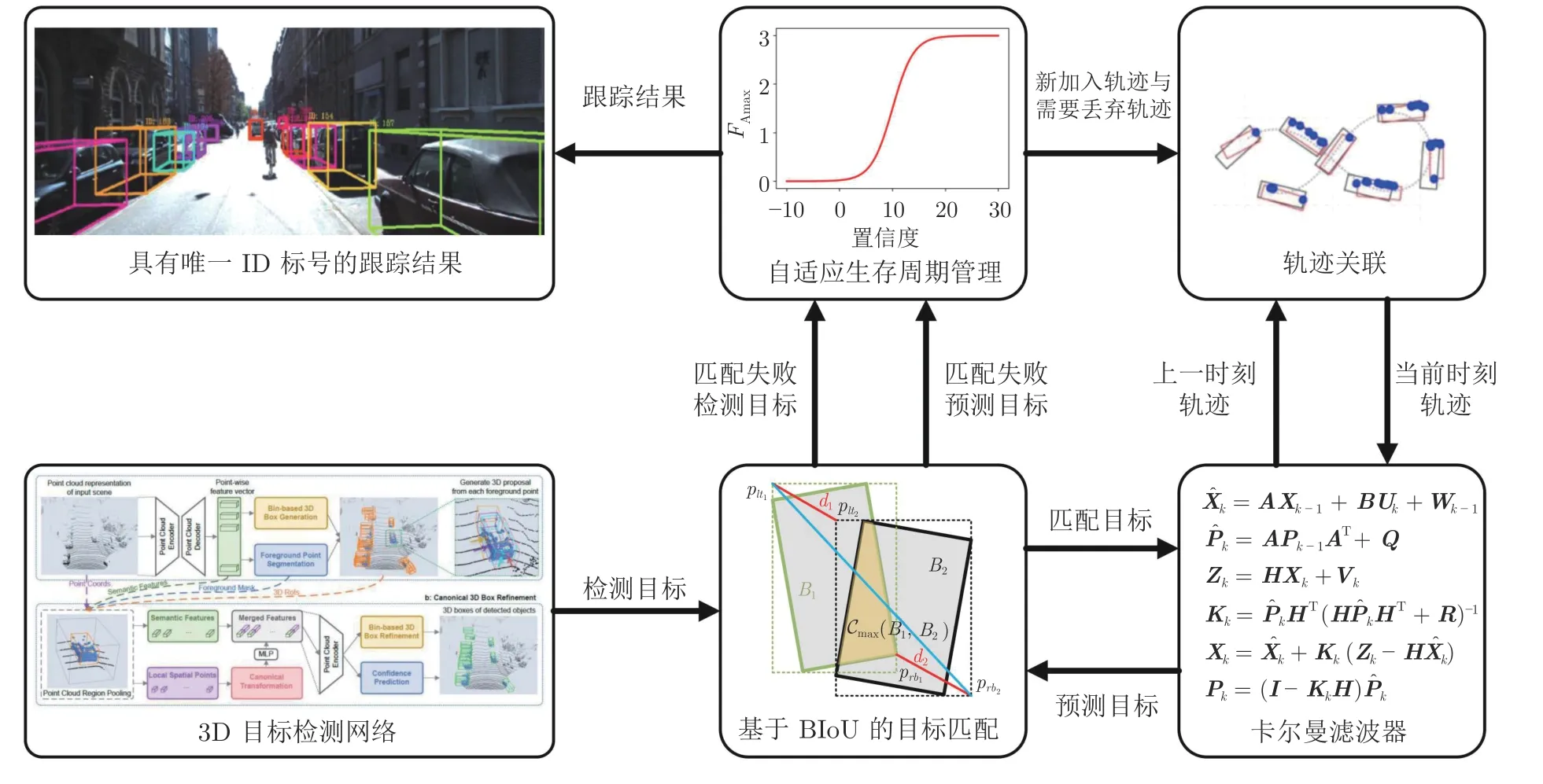
圖5 基于激光雷達的3D 多目標跟蹤整體流程Fig.5 Overall pipeline for LiDAR-based 3D multi-object tracking
為了驗證本文所提出的基于BIoU 度量和自適應生存周期管理多目標跟蹤算法的性能,本文與基準AB3DMOT 算法在KITTI 多目標跟蹤數據集的3 類目標上進行了對比;同時在Car 類別上還與另外兩種端到端的深度學習算法FANTrack[21]和DiTNet[22]進行了比較.實驗結果如表2 所示.
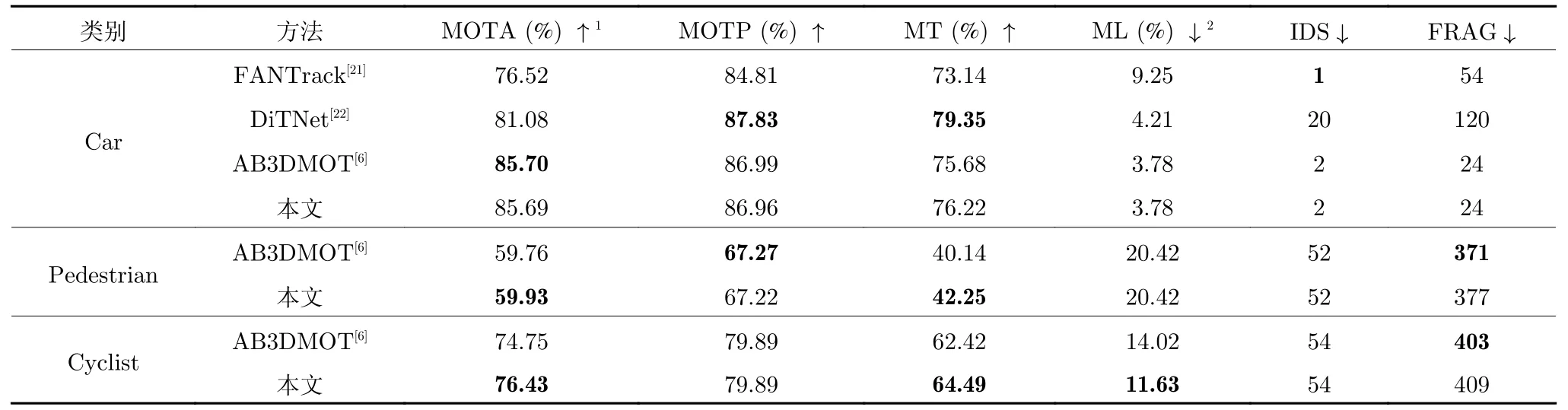
表2 KITTI 數據集上對3 類目標 (汽車、行人、騎自行車的人)跟蹤性能對比Table 2 Tracking performance comparison about three kinds of objects (Car,Pedestrian,Cyclist)on KITTI dataset
表2 的結果表明,本文提出的基于BIoU 度量和自適應生存周期管理策略的多目標跟蹤算法相比于基準算法在3 類目標上均獲得了更高的MT 值,意味著本文算法在對目標的長時間跟蹤性能上明顯優于基準算法;在Pedestrian 和Cyclist 兩個類別上,跟蹤準確度MOTA 較基準算法有顯著提升,而在Car 類別上與基準算法基本一致.最值得注意的是,本文算法在命中率MT 和丟失率ML 這兩項指標上均有顯著提升,說明了本文算法在長時間穩定跟蹤目標這個問題上具有明顯優勢.另外,在Pedestrian 和Cyclist 兩類目標的跟蹤任務上獲得更好的效果,也說明了基于BIoU 的目標跟蹤可以有效提高對小目標的跟蹤性能.分析其原因,可以發現小目標更易于出現檢測框與預測框交集較少或無交集的情況,這也正是BIoU 相較于傳統IoU 最大的優點,即解決IoU 相等或IoU=0 時的關聯度量問題.
圖6 和圖7 分別展示在出現誤檢和漏檢情況時,本文所提出改進跟蹤算法和基準算法的跟蹤結果.在圖6 的第2 行中,兩類算法均出現了誤檢的情況 (用紅色圓圈標記),但相較于基準算法(圖6(a)的第1 行),由于引入了自適應生存周期管理,因此在下一幀數據中,改進跟蹤算法及時將誤檢目標刪除,而基準跟蹤算法仍會對誤檢目標進行持續跟蹤,直到生存周期結束.上述結果表明基于本文改進的跟蹤算法可以明顯減小誤檢目標的生存周期,降低誤檢次數.
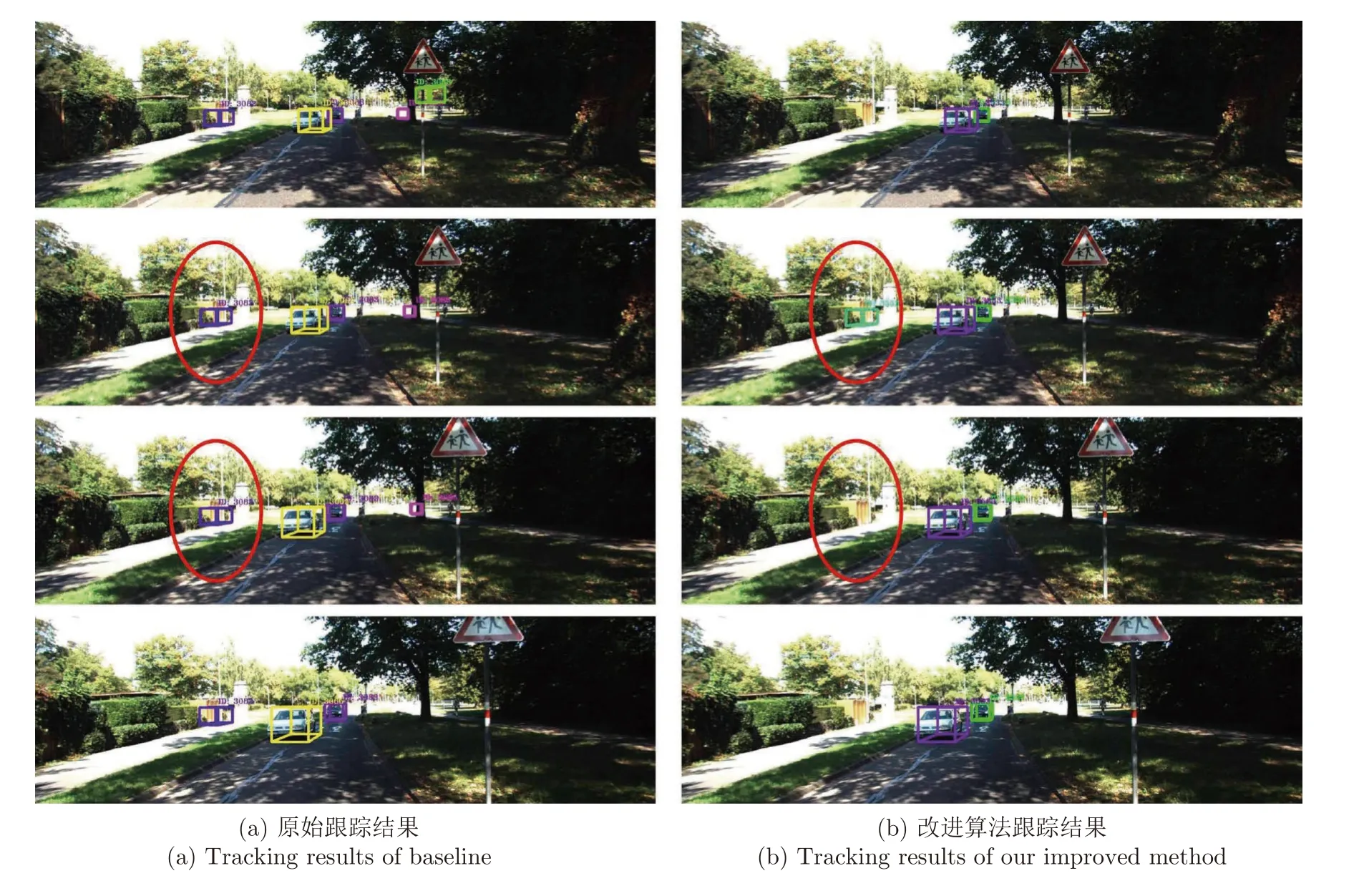
圖6 改進方法與基準方法的跟蹤比較 (誤檢)Fig.6 Tracking comparison between our improved method and baseline (false detection)
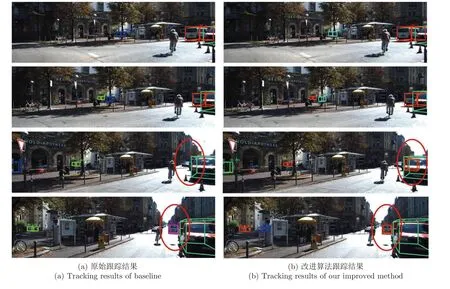
圖7 改進方法與基準方法的跟蹤比較 (漏檢)Fig.7 Tracking comparison between our improved method and baseline (missed detection)
同樣,對于目標漏檢的情況,本文算法也能給出更好的結果.圖7 (a)的第3 行中,由于紅色圓圈標記的目標被其他物體遮擋而導致漏檢,在下一幀中,該目標再次被檢測到時,已被標記為新的目標(這一點從對比圖7(a)的第2 行和圖7(a)的第4 行中檢測框顏色不一致可以看出).而使用本文提出的改進算法,即使在圖7(b)的第3 行中出現了遮擋,因為生存周期并未結束,因此目標仍然在持續跟蹤,也未發生身份切換的問題.這說明,在由于目標遮擋等問題出現漏檢時,本文提出的改進跟蹤算法可以有效克服漏檢問題,保持目標持續跟蹤與ID恒定.
3.3 消融實驗對比
為了進一步說明BIoU 度量和自適應生存周期管理策略的實際效果,本文在KITTI 驗證集上進行了消融實驗.為了便于比較,本文設置最大生存周期Fmax=5;對于固定生存周期策略,生存周期即為Fmax;對于自適應生存周期策略,采用式 (13)描述的關系自適應計算生存周期FAmax.消融實驗的結果如表3 所示,其中不使用BIoU 和FAmax的跟蹤方法即為原始AB3DMOT 算法.
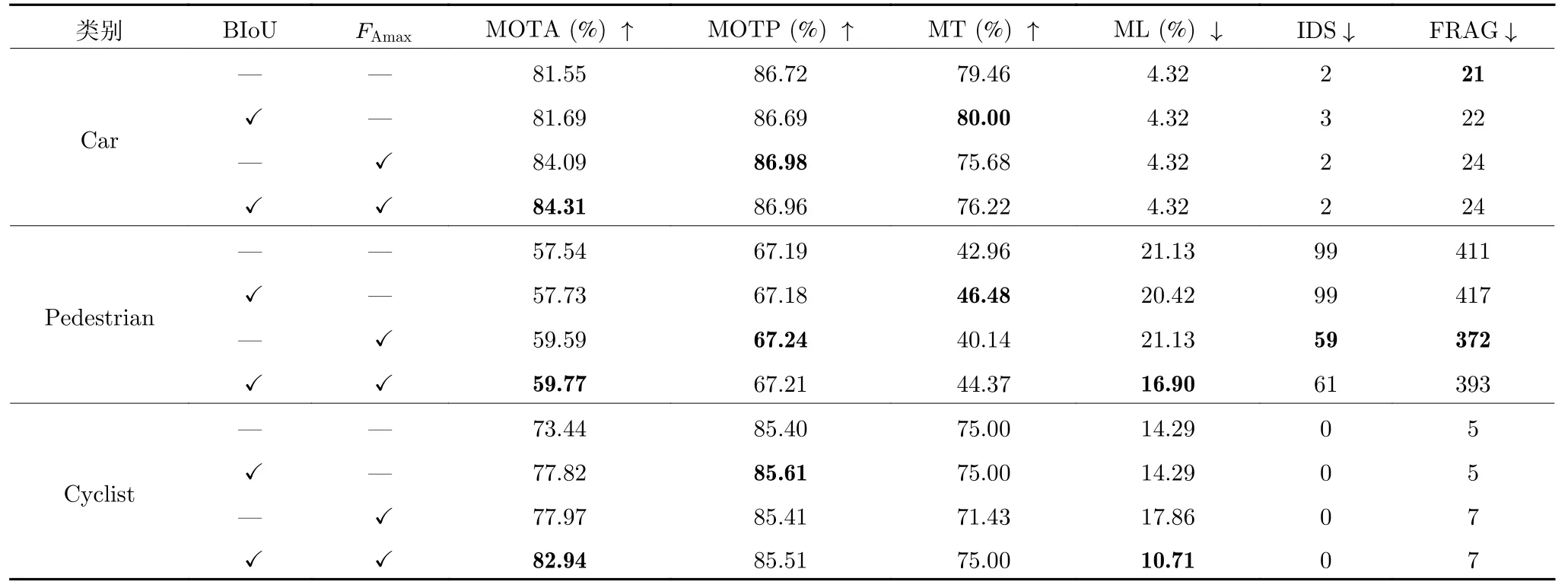
表3 消融實驗Table 3 Ablation experiments
首先,對BIoU 進行性能分析.在表3 中,每類目標的第2 行數據與第1 行相比,區別在于使用BIoU替代原算法中的傳統IoU.對比發現:3 類目標的跟蹤準確度MOTA 和命中率MT 性能均有提升;在大目標 (Car 類別)上,MOTA 和MT 略有提升;在小目標 (Pedestrian 和Cyclist)上提升明顯,Pedestrian 命中率MT 提升超過3%,Cyclist 準確度MOTA 提升超過4%.需要說明的是:對于小目標類別,更容易出現預測框與檢測框不重合 (IoU=0)的問題.這種情況下,本文提出的BIoU 由于引入了邊界度量懲罰項,可以克服傳統IoU 失效的問題,獲得可靠的匹配結果,從而提高跟蹤精度和穩定性.
其次,對自適應生存周期管理策略進行性能分析.在表3 中,每類目標的第3 行數據與第1 行相比,區別在于使用自適應生存周期替代原算法中的固定生存周期.對比發現:使用自適應生存周期可以提高跟蹤準確度MOTA,減少身份切換次數IDS和跟蹤打斷次數FRAG;每個類別的MOTA 均有大約2%的性能提升;在Pedestrian 類別上,IDS和FRAG 均有明顯降低,這是因為對于Pedestrian,更容易由于匹配失敗出現漏檢情況,使用自適應生存周期管理策略可以有效克服固定生存周期對漏檢過于敏感的缺點.
最后,對比基準的AB3DMOT 算法,使用本文所提出的基于BIoU 和自適應生存周期管理策略的跟蹤算法,在3 類目標的跟蹤性能如準確度MOTA、定位精度MOTP、丟失率ML、身份切換次數IDS上均得到了提升,其中以Cyclist 類別提升最為顯著.消融實驗結果表明,本文所提出算法能明顯改善多目標跟蹤效果.
4 結束語
本文提出了一種使用BIoU 度量和自適應生存周期管理策略的多目標跟蹤算法.該算法使用3D目標檢測器輸出的目標信息,使用BIoU 度量計算檢測框與預測框的匹配矩陣,使用匈牙利匹配算法獲得匹配結果.BIoU 度量可以有效克服單獨使用IoU度量或歐氏距離度量可能導致的度量失效問題.在對跟蹤目標進行生存周期管理時,本文設計了一種自適應生存周期管理策略.該策略根據跟蹤目標的檢測置信度,自適應計算目標的最大生存周期,從而有效減少了由于固定生存周期導致的誤檢問題.在KITTI 多目標跟蹤驗證集上的實驗表明,本文所提出的方法相較于基準AB3DMOT 多目標跟蹤算法,在跟蹤準確度、長時間跟蹤命中率和丟失率指標上均有顯著提升,尤其對于小目標跟蹤具有較好的效果.
猜你喜歡
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:46
中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:46
測控技術(2018年12期)2018-11-25 09:37:34
北京航空航天大學學報(2017年9期)2017-12-18 07:12:25
海峽科技與產業(2016年3期)2016-05-17 04:32:12
電源技術(2016年9期)2016-02-27 09:05:39
電源技術(2015年1期)2015-08-22 11:16:28
