自動(dòng)電壓調(diào)節(jié)系統(tǒng)的自抗擾控制
2023-10-29 01:47:54王梓鑒鄒雅蓉靳興康
計(jì)算機(jī)仿真 2023年9期
關(guān)鍵詞:系統(tǒng)
王梓鑒,譚 文,鄒雅蓉,靳興康
(華北電力大學(xué)控制與計(jì)算機(jī)工程學(xué)院,北京 102206)
1 引言
自動(dòng)電壓調(diào)節(jié)器(AVR),也被稱為自動(dòng)勵(lì)磁調(diào)節(jié)器,它是勵(lì)磁系統(tǒng)控制的核心部分。其核心任務(wù)是在不同的負(fù)載條件下,在額定電壓范圍內(nèi)對(duì)交流發(fā)電機(jī)的端電壓進(jìn)行調(diào)節(jié),維持發(fā)電機(jī)機(jī)端電壓不過多地偏離額定值,提供和調(diào)節(jié)系統(tǒng)的無功功率,保證發(fā)電機(jī)運(yùn)行的安全性和經(jīng)濟(jì)性。對(duì)于網(wǎng)側(cè)而言,AVR還有著抑制功率振蕩,提升電力系統(tǒng)靜態(tài)穩(wěn)定和改善暫態(tài)穩(wěn)態(tài)的作用。在實(shí)際生產(chǎn)過程中,由于負(fù)荷變化與發(fā)電機(jī)高繞組電感值[1],會(huì)導(dǎo)致交流發(fā)電機(jī)端電壓不穩(wěn),響應(yīng)緩慢。為克服這一缺點(diǎn),必須在AVR中加入控制器。
在AVR控制器的研究中,占據(jù)主導(dǎo)地位還是傳統(tǒng)PID控制,因?yàn)樗Y(jié)構(gòu)簡(jiǎn)單,并且可以通過試錯(cuò)[2]實(shí)現(xiàn)在線整定。更進(jìn)一步,工程師們?cè)赑ID的基礎(chǔ)上提出了高階PID——具有二階微分的控制器(PIDD),可以取得比常規(guī)PID更好的瞬時(shí)響應(yīng)。但是PIDD控制也有著先天的不足之處:一是對(duì)高頻噪聲敏感;二是需要整定的參數(shù)更多。而為了改善控制品質(zhì),工程師們已經(jīng)提出過許多其他的控制方案。文獻(xiàn)[3]提出了模糊邏輯控制器與AVR結(jié)合;文獻(xiàn)[4]提出了基于粒子群算法的模型預(yù)測(cè)控制在AVR控制中的應(yīng)用;文獻(xiàn)[5]比較了基于常規(guī)PID和模糊PID控制器在AVR上的性能表現(xiàn);文獻(xiàn)[6]中將自適應(yīng)控制器與AVR系統(tǒng)進(jìn)行了結(jié)合。文獻(xiàn)[7]將鯨魚尋優(yōu)算法(WOA)與PIDD結(jié)合,應(yīng)用于對(duì)AVR的控制;文獻(xiàn)[8]采用四階粒子群算法來設(shè)計(jì)AVR系統(tǒng)的PID參數(shù)。以上提到的先進(jìn)控制方法或者尋優(yōu)算法的確可以提升系統(tǒng)性能,但過于依賴系統(tǒng)模型的準(zhǔn)確性,考慮到實(shí)際運(yùn)行中電力系統(tǒng)中參數(shù)的可變性,因而現(xiàn)實(shí)中難以應(yīng)用。
上世紀(jì)九十年代我國(guó)學(xué)者韓京清提出了自抗擾控制(Active Disturbance Rejection Control,ADRC)[9],其主要思想是將系統(tǒng)內(nèi)部不確定性和外部干擾視為總擾動(dòng),設(shè)計(jì)擴(kuò)張狀態(tài)觀測(cè)器(Extended State Observer,ESO)來進(jìn)行估計(jì),并利用狀態(tài)反饋率進(jìn)行補(bǔ)償和控制。ADRC最大的優(yōu)勢(shì)在于結(jié)構(gòu)簡(jiǎn)單,無需知道系統(tǒng)的精確模型,只需明確系統(tǒng)的高頻增益以及相對(duì)階數(shù),就可以進(jìn)行參數(shù)整定。因此對(duì)于AVR控制器的設(shè)計(jì)問題,自抗擾控制是一個(gè)很好的選擇。除此之外ADRC的魯棒性強(qiáng),對(duì)擾動(dòng)的抑制作用明顯,因此在很多的領(lǐng)域得到了應(yīng)用。文獻(xiàn)[10]中探討了把ADRC應(yīng)用于光伏發(fā)電;文獻(xiàn)[11]中研究了ADRC和負(fù)荷頻率控制的結(jié)合;文獻(xiàn)[12]中研究了ADRC應(yīng)用于超臨界機(jī)組協(xié)調(diào)控制系統(tǒng);文獻(xiàn)[13]把ADRC用在了DCS火電機(jī)組當(dāng)中。但是,非線性自抗擾控制需要整定的參數(shù)過多,不利于其在現(xiàn)實(shí)中的推廣。為此,高志強(qiáng)教授在自抗擾控制的基礎(chǔ)之上提出了通過把擴(kuò)張狀態(tài)觀測(cè)器ESO和反饋控制率進(jìn)行線性化得到了線形自抗擾控制(Linear Active Disturbance Rejection Control,LADRC)方法,使得ADRC的結(jié)構(gòu)大為簡(jiǎn)化[14]。
本文針對(duì)AVR的控制問題設(shè)計(jì)三階線性自抗擾控制,它在不依賴模型準(zhǔn)確性的前提下能很好地抑制負(fù)載擾動(dòng)。另外值得注意,目前大多數(shù)研究只考慮把AVR當(dāng)作一種發(fā)電單元來調(diào)節(jié)其終端電壓,而由[15]可知AVR中普遍包含著定子電流限制器等限制環(huán)節(jié),該非線性環(huán)節(jié)在實(shí)際中可能降低系統(tǒng)性能,甚至導(dǎo)致不穩(wěn)定。之前的研究普遍沒有考慮到這一點(diǎn),本文將針對(duì)定子電流限制這一環(huán)節(jié)提出了一種補(bǔ)償方法,有效避免了控制器飽和這一現(xiàn)實(shí)問題。
仿真表明,LADRC對(duì)振蕩有很好的抑制效果,參數(shù)整定簡(jiǎn)單,可以應(yīng)用到AVR終端電壓控制中。
2 自抗擾控制
2.1 結(jié)構(gòu)
由于自抗擾控制只需明確被控對(duì)象的相對(duì)階數(shù)n和高頻增益b,所以可以假定被控對(duì)象的模型如下
y(n)(t)=bu(t)+f(y(t),u(t),d(t))
(1)
其中n為已知的系統(tǒng)階數(shù),b為系統(tǒng)高頻增益,f(y(t),u(t),d(t))
為系統(tǒng)的廣義擾動(dòng),包含系統(tǒng)未知內(nèi)部擾動(dòng)和外部干擾。
LADRC的中心思想是利用線性擴(kuò)張狀態(tài)觀測(cè)器來估計(jì)系統(tǒng)廣義擾動(dòng)以及輸出的各階導(dǎo)數(shù),取
(2)

(3)
式中

(4)
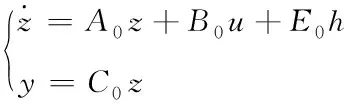
為這個(gè)系統(tǒng)設(shè)計(jì)龍伯格觀測(cè)器

(5)
其中z是觀測(cè)器輸出矩陣,L0是觀測(cè)器增益

(6)


(7)
則(1)式變?yōu)槿缦滦问?/p>

(8)
y(n)(t)≈u0(t)
(9)
通過設(shè)計(jì)反饋控制如下,可以達(dá)到閉環(huán)穩(wěn)定控制效果
u0=k1r-k1z1-k2z2…-knzn
(10)
最終得到控制率

(11)
綜上,LADRC的狀態(tài)空間表達(dá)式
(12)
可知LADRC的基本結(jié)構(gòu)如圖1所示。
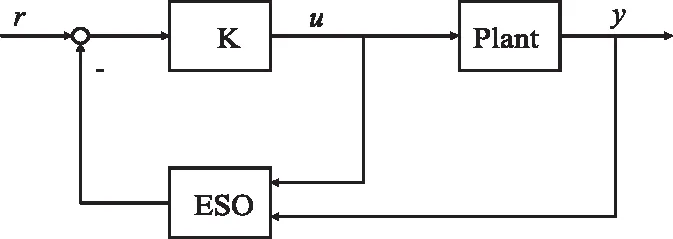
圖1 ADRC結(jié)構(gòu)圖
2.2 三階LADRC的分析
根據(jù)上一部分的討論可知,三階LADRC狀態(tài)空間表示為:
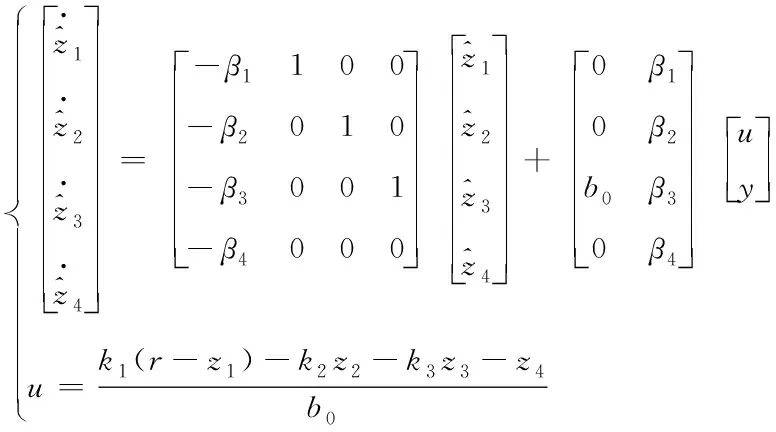
(13)
從而
(14)

(15)

(16)

(17)

(18)

(19)
結(jié)論:
1)ESO的作用不僅僅是估計(jì)系統(tǒng)輸出及其各階導(dǎo)數(shù),還在估計(jì)擾動(dòng)的過程中利用到了輸出的積分,進(jìn)而把整個(gè)控制過程中的積分包括進(jìn)擾動(dòng)的估計(jì)和補(bǔ)償當(dāng)中。因此ESO相當(dāng)于改良的積分環(huán)節(jié)。只要L0取合適的值,ESO便可實(shí)現(xiàn)對(duì)于輸出和廣義擾動(dòng)的準(zhǔn)確估計(jì)。
2)三階LADRC就是P+I+D+ D2的組合,不過與PIDD直接利用輸出的積分和導(dǎo)數(shù)不同,LADRC先是對(duì)系統(tǒng)輸出的積分以及導(dǎo)數(shù)進(jìn)行了估計(jì),再進(jìn)行線性組合。因此,使用三階LADRC對(duì)PIDD進(jìn)行改進(jìn)是一種可行的方案。
2.3 參數(shù)整定
由上文可知,控制器增益與觀測(cè)器增益的選取就是ADRC整定的實(shí)質(zhì)。根據(jù)高志強(qiáng)教授提出的帶寬法[16],將控制器增益與觀測(cè)器增益的整定轉(zhuǎn)化為選取合適的帶寬。ESO的特征方程為
|sI-(A0-L0C0)|=sn+1+β1sn+…+βn+1
(20)
配置ESO的所有極點(diǎn)至-ω0,得
sn+1+β1sn+…+βn+1=(s+ω0)n+1
(21)
式中

(22)
因此只要給觀測(cè)器取適當(dāng)帶寬值,ESO就可以無差估計(jì)系統(tǒng)輸出、其各階導(dǎo)數(shù)以及總擾動(dòng)。
同理,系統(tǒng)閉環(huán)特征方程
|sI-(A0-B0K0)|=s(sn+knsn-1+…+k2s+k1)
(23)
同樣將其極點(diǎn)全配置于-ωc
sn+knsn-1+…+k2s+k1=(s+ωc)n
(24)

(25)
想要調(diào)節(jié)控制器增益K0,改變控制器帶寬ωc即可。
相比于PIDD控制器,三階LADRC只需整定2個(gè)參數(shù),而PIDD需要整定4個(gè)參數(shù),三階LADRC不僅結(jié)構(gòu)上使得PIDD可實(shí)現(xiàn),而且減少了整定參數(shù),因此在實(shí)際中具有重大應(yīng)用潛力。
3 系統(tǒng)
本文采用的AVR模型由文獻(xiàn)[17]給出,如圖2。每個(gè)部分的傳遞函數(shù)以及參數(shù)取值范圍見表1。

表1 AVR各組成部分的傳遞函數(shù)及其參數(shù)取值范圍

圖2 AVR系統(tǒng)組成
易知系統(tǒng)開環(huán)傳遞函數(shù)為
G(s)=
(26)
系統(tǒng)相對(duì)階為3,而高頻增益
(27)
因此LADRC可以取三階,而其性能只需通過整定兩個(gè)帶寬參數(shù)即可達(dá)到期望性能。
4 仿真分析
4.1 控制性能指標(biāo)
文獻(xiàn)[18]提出了一種基于閉環(huán)系統(tǒng)階躍響應(yīng)參數(shù)而設(shè)計(jì)的目標(biāo)函數(shù)FOD(FigureOfDemerit),其中響應(yīng)峰值Mp,穩(wěn)定時(shí)間Ts,上升時(shí)間Tr,穩(wěn)態(tài)誤差Ess
FOD=(1-e-β)(Mp+Ess)+e-β(Ts-Tr)
(28)
β是自定義變量,為了便于計(jì)算,取β=1,而結(jié)合2.2節(jié)部分的討論,三階LADRC和PIDD都具有積分作用,可以消除穩(wěn)態(tài)誤差,所以殘差Ess可以忽略不計(jì)。如此便引入了一個(gè)評(píng)判控制效果的變量,將控制品質(zhì)數(shù)字化。
4.2 三階LADRC的設(shè)計(jì)
選取AVR標(biāo)稱參數(shù)如下:Ka=10,Ta=0.1;Ke=1.0,Te=0.4;Ks=1.0,Ts=0.01;Kg=1.0,Tg=1.0;依據(jù)2.3節(jié)提到的帶寬法可以很容易得到LADRC控制器參數(shù)
b0=250,ω0=28,ωc=8.1
(29)
為了驗(yàn)證所設(shè)計(jì)三階LADRC的性能,在Matlab自帶的Simulink中進(jìn)行仿真驗(yàn)證,并在5s時(shí)加入階躍擾動(dòng)ΔVd=-1,與PIDD的控制效果進(jìn)行對(duì)比(其中PIDD的參數(shù)由文獻(xiàn)[7]中根據(jù)鯨魚尋優(yōu)算法得出)。實(shí)驗(yàn)對(duì)比結(jié)果如圖3所示。

圖3 AVR輸出控制系統(tǒng)響應(yīng)
可以看到三階LADRC取得了比PIDD更好的控制效果,相比來說LADRC的超調(diào)更小,穩(wěn)定時(shí)間更快,當(dāng)5s擾動(dòng)加入后三階LADRC的振蕩小得多,回復(fù)速度更快。說明三階LADRC的反應(yīng)速度和抗干擾性要強(qiáng)于PIDD。
4.3 魯棒性分析
在實(shí)際工業(yè)過程當(dāng)中,負(fù)荷變化以及電力系統(tǒng)參數(shù)的柔性化會(huì)導(dǎo)致系統(tǒng)的運(yùn)行點(diǎn)頻繁變化。因此必須對(duì)其魯棒性進(jìn)行分析。為了評(píng)價(jià)設(shè)定點(diǎn)的跟蹤性能,給AVR每個(gè)環(huán)節(jié)的時(shí)間常數(shù)依次加入+50%,+25%,-25%,-50%的不確定度,分別采用LADRC和PIDD控制器進(jìn)行控制,在系統(tǒng)參數(shù)變化的條件下觀察響應(yīng)變化,從而對(duì)AVR系統(tǒng)進(jìn)行控制器魯棒性分析,以時(shí)域標(biāo)準(zhǔn)作為評(píng)價(jià)指標(biāo)。
在表2,表3中,每次系統(tǒng)時(shí)間常數(shù)變化后AVR系統(tǒng)的性能表現(xiàn)指標(biāo)Mp,Ts,Tr,和FOD值一起被給出。(Ts的數(shù)值較小,加入不確定度的影響不大,所以只考慮其他三個(gè)時(shí)間常數(shù))。

表2 三階LADRC的階躍響應(yīng)性能指標(biāo)以及FOD
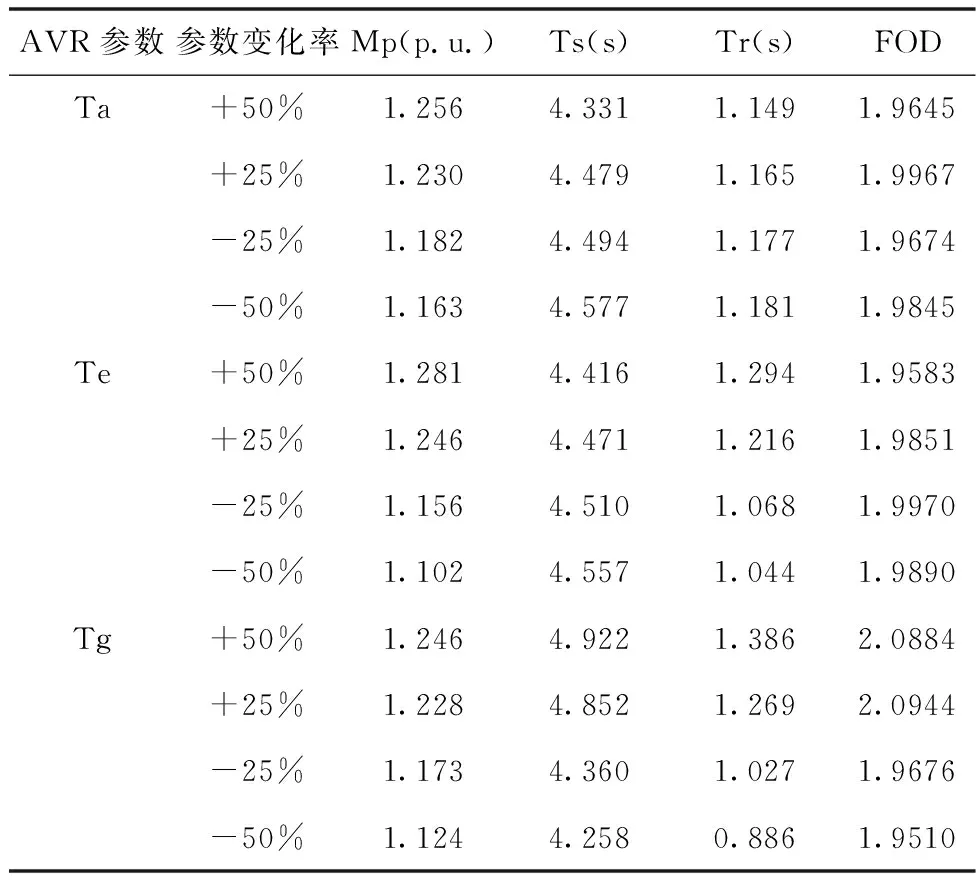
表3 PIDD的階躍響應(yīng)性能指標(biāo)以及FOD
圖6,圖7為選取三階LADRC和PIDD各自表現(xiàn)最差的,即FOD值最大的不確定度參數(shù)與原系統(tǒng)進(jìn)行比較所得的跟蹤及抗擾曲線。對(duì)比圖6,圖7以及分析表2,表3中的數(shù)據(jù)可以發(fā)現(xiàn),在系統(tǒng)具有相同的不確定度時(shí),LADRC總是有更好的閉環(huán)響應(yīng)和更小的FOD。因此,三階LADRC控制器具有強(qiáng)于PIDD控制器的魯棒性。
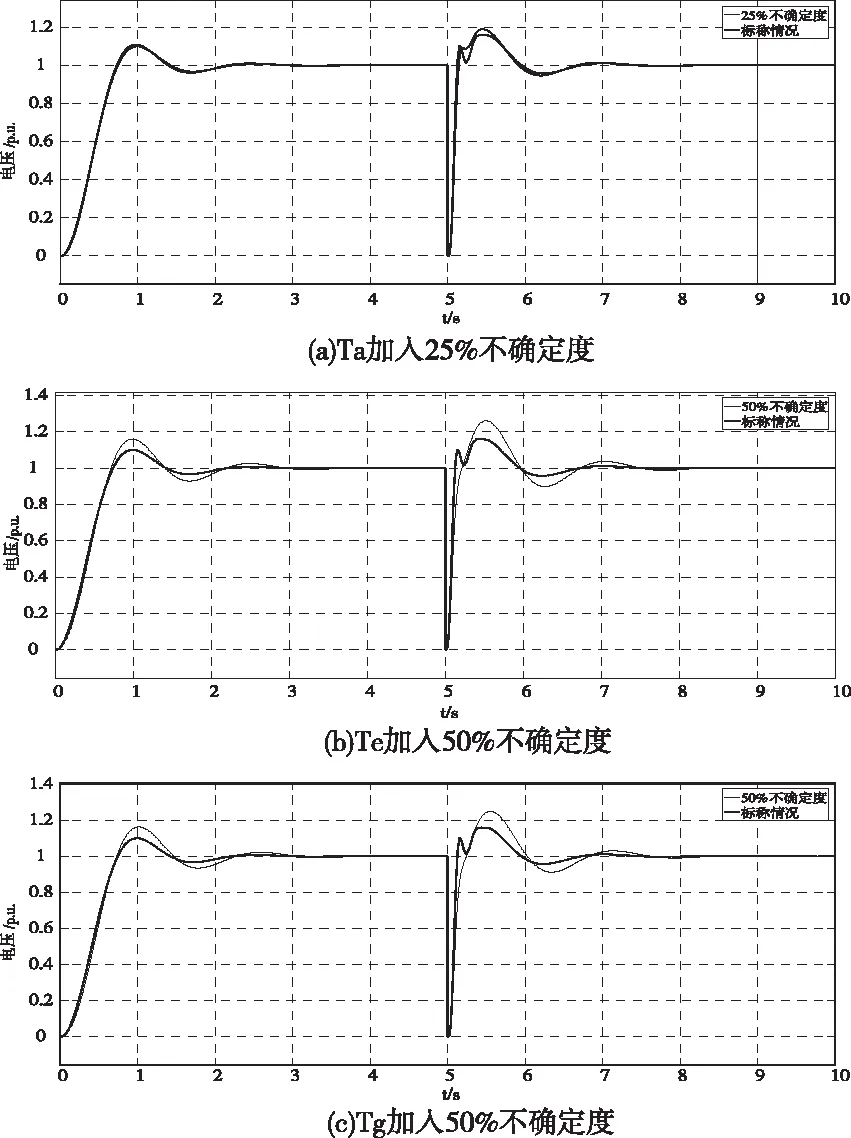
圖6 分析在 Ta(a),Te(b),Tg(c)變化下三階LADRC的魯棒性

圖7 分析在 Ta(a),Te(b),Tg(c)變化下PIDD的魯棒性
5 定子電流限制
在發(fā)電機(jī)的強(qiáng)勵(lì)磁過程當(dāng)中,定子繞組會(huì)出現(xiàn)短時(shí)過電流現(xiàn)象[19]。為應(yīng)對(duì)這一現(xiàn)象,目前廣泛應(yīng)用的是在發(fā)電環(huán)節(jié)加入定子電流限制環(huán)節(jié)(Stator Current Limit,SCL)。雖然SCL的初始目標(biāo)僅僅是應(yīng)對(duì)發(fā)電機(jī)運(yùn)行超出額定有功功率的情況,但是它也會(huì)影響到電壓控制器的控制性能,致使控制品質(zhì)惡化。例如,若在之前的仿真中定子電流限制取0.64p.u./s,則系統(tǒng)會(huì)振蕩發(fā)散。
本文采取將發(fā)電機(jī)的理論電壓輸出和實(shí)際電壓輸出之差加入ESO中進(jìn)行估計(jì)來快速補(bǔ)償該誤差。改進(jìn)后的系統(tǒng)如圖8所示,同時(shí)還需引入一個(gè)可調(diào)參數(shù)k,增大k會(huì)加強(qiáng)控制效果但系統(tǒng)穩(wěn)定性會(huì)下降。所以需要根據(jù)經(jīng)驗(yàn)得到適當(dāng)?shù)膋值。
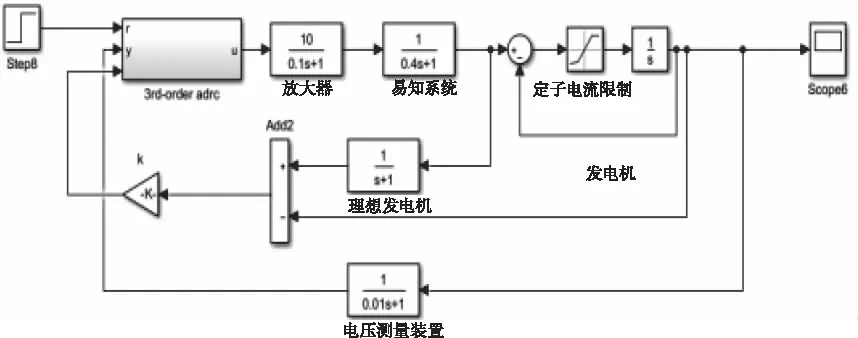
圖8 基于LADRC補(bǔ)償定子電流限制的策略
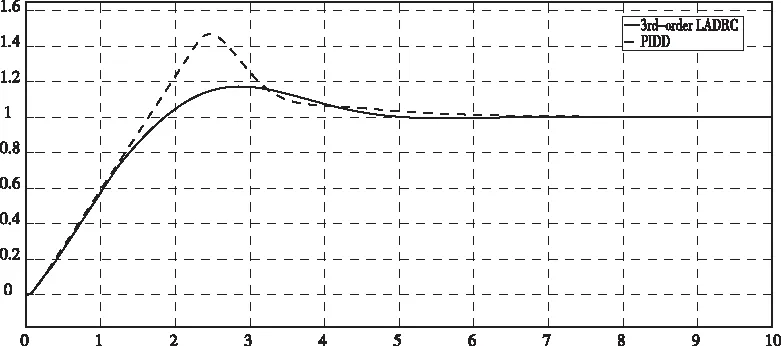
圖9 具有定子電流限制的AVR系統(tǒng)響應(yīng)
繼續(xù)考慮之前的仿真系統(tǒng),定子電流限制為0.64p.u./s;取k=1.05。對(duì)比PIDD的控制曲線看出,三階LADRC有更小的超調(diào)和更短的穩(wěn)定時(shí)間。因此改進(jìn)后的三階LADRC有更好的控制品質(zhì)。
6 結(jié)論
本文論證了三階LADRC本質(zhì)上就是比例+積分+微分+二階微分的組合,因此可以用于對(duì)PIDD控制器的升級(jí)替代。以AVR系統(tǒng)為例,通過帶寬法整定三階LADRC的參數(shù),與PIDD控制器進(jìn)行比較,證明了應(yīng)用三階ADRC可以取得比PIDD更好的效果。以及更好的魯棒性,最后針對(duì)定子電流限制這一實(shí)際問題提出了一種補(bǔ)償方案。仿真結(jié)果表明LADRC相比于傳統(tǒng)PIDD在對(duì)AVR終端電壓控制應(yīng)用時(shí),可以取得更好的效果。
猜你喜歡
工業(yè)設(shè)計(jì)(2022年8期)2022-09-09 07:43:20
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測(cè)繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(shù)(2019年12期)2019-12-25 03:06:46
制造技術(shù)與機(jī)床(2019年10期)2019-10-26 02:47:06
中國(guó)洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34
鐵道通信信號(hào)(2018年5期)2018-06-28 03:06:24
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
知識(shí)經(jīng)濟(jì)·中國(guó)直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(shù)(2016年6期)2016-04-20 06:21:32
