自適應數據融合和模糊控制在弓網幾何參數校正中的應用
2023-10-26 13:04:32歐志新鄧春蘭
合肥師范學院學報 2023年3期
歐志新,鄧春蘭
(安徽交通職業技術學院 城市軌道交通與信息工程系,安徽 合肥 230051)
接觸網系統作為電力供電網絡中的電流傳輸環節,具有載荷電流大、傳輸距離遠、電能分布集中和弓網動態波動等特征。在給電力機車傳輸電能的過程中,該系統需要具備電流供應安全和弓網接觸穩定的技術特點。隨著電力機車運行速度的提升和外部復雜環境的影響,弓網動態參數難以通過人工計算和儀器觀測獲取、檢測。劉仕兵通過檢測高速運行中的弓網系統的動態參數和高精度儀器實時參數,對電流傳輸誤差和穩定性進行了分析,發現動態弓網接觸對波動的幾何參數精確度要求很高,難以通過描述輸入量和輸出值之間的非線性關系來建立和校正電流在傳輸過程中的數學模型[1]。
吳積欽針對弓網動態特性接觸網系統的幾何參數進行了測量與校正,利用模糊控制策略建立了“輸入—輸出—反饋”之間的比例關系,根據輸出值和設定值的反饋誤差進行預估和參數校正,并將校正后的幾何參數與標準值進行比較,計算找出符合電流安全傳輸和誤差的控制策略,避免了儀器檢測時波動和誤差難以校正的問題,也不需要具體的弓網結構模型和精確的測量參數[2]。
宋瑋、孫皓瑩等關于接觸網系統結構模型和幾何參數技術標準的研究發現:弓網接觸壓力過小,電弧閃絡會造成關聯電氣設備跳閘;弓網接觸壓力過大,會導致機械磨耗增大,出現拉出值偏小、供電中斷等問題[3-4]。因此,需要實時對弓網系統運行的幾何參數進行監測和校正。系統幾何參數測量誤差帶來的不安全因素會引發弓網斷線的風險[3]。
研究提出一種自適應控制和數據融合算法,針對弓網動態運行參數與結構多變情形時的實時模型建立解決方案。自適應控制具有參數迭代和修正功能,而模糊控制是基于開源指令集的理論算法,符合動態系統運行參數實時變化和結構多變的特性,不需要準確的數學模型結構,能根據輸出功能與輸入參數的比例關系,自適應控制、調節超出設定值的誤差,抑制弓網波動中超出設定范圍的曲線,控制策略能保障良好的電流穩定性和幾何參數準確性。
綜上所述,研究基于自適應數據融合對弓網系統幾何參數進行檢測與校正,首先分析接觸網系統參數特點與弓網電流安全傳輸的邏輯關系,從而確立弓網系統電流穩定性的相關理論,建立幾何參數超調預警、抑制防護與參數校正方案[4]。該方案以仿真軟件計算平臺為監控載體,對理論仿真數據和儀器實測的數據進行比較和分析,最終應用于弓網主要幾何參數的調節與校正。
1 接觸網幾何參數測量與特征分析
弓網系統的幾何參數主要包括靜態參數和動態參數,其拉出值和導線高度決定了弓網運行的機械接觸和電氣閃絡特性,而弓網接觸之間的壓力和電弧現象是接觸網系統安全供電的基礎[5]。接觸網造成的電力機車運行振動會使受電弓產生離線電弧,導致接觸網參數與運行模型不匹配,在受電弓頻繁離線的暫態過程中,機車中的電壓互感器失電后又恢復得電,電路會產生多次過渡的非線性變化,影響接觸網變化曲線的特征。
圖1是弓網幾何參數的測量方法(應針對影響弓網模型的結構和擬合條件設定測量標準,控制弓網運行曲線的誤差范圍和波動區間,使弓網模型不受外部過電流的諧波影響),具體步驟如下:

圖1 接觸網參數檢修與計算示意圖
(1)使用鐵路軌距尺測量外軌超高,外軌超高值h的設定標準為0~150 mm。
(2)使用激光測量儀和仿真計算平臺測量并校正接觸線高度H和實際拉出值a。
(3)確定導高值、拉出值范圍,暫態電流波動和弓網接觸壓力等,將測量誤差控制在0~20 mm[5]。
(4)利用C=h×H/L,m=a-c,Δm=m實-m測等公式計算拉出值。其中,c表示機車運行線路中心與受電弓中心的偏差值;L是機車鋼軌的軌距;m是測量定位點距離線路中心的水平距離;m標是設定的標準值;m實是弓網運行區段實測的數值;△m是標準值減去實測值。
(5)對m標和m實進行比較,確定調整量△m的大小和方向。
其中,a是弓網運行是否出現誤差和波動的關鍵,應根據a值來制定校正方案。弓網運行波動造成的離線電弧會使測量參數和模型不匹配,從而影響接觸網的曲線變化特征和參數校正效果。運行系統通常在接觸線磨耗和拉出值檢測等方面具有嚴格的誤差控制,保證接觸線在車速變化的空間實現波動和受電弓工作范圍滑動[6]。一旦弓網參數誤差過大,會導致接觸線拉斷或偏移線路中心線距離,導高過大或過小會造成弓網接觸不均勻,產生運行時電弧摩擦和機械磨損嚴重的情況。因此,研究弓網系統運行過程中的幾何參數對于系統安全運營具有重要的意義。
2 基于約束集關系的模糊控制理論
弓網系統動態幾何參數測量具有不確定性,其固有的模型結構會隨著外部環境的波動而發生變化。弓網結構與模型的失真會影響其幾何參數曲線的運行效果,使制定的校正參數和補償方案難以達到預期的效果。模糊控制理論的特點在于約束集的廣泛,將輸入量與實時參數進行比較可以得出下一次運行區間范圍的誤差,從而在上一次校正的基礎上不斷進行優化,使最終的幾何參數越來越接近理想值[7]。這是一個逐步優化、校正失真模型或不確定參數的優化解。
圖2是模糊控制系統方框圖的結構。其中r(t)為模糊控制系統輸入設定值;E(t)為單位時間內模糊量誤差;EC(t)為單位時間模糊運算誤差變化率;Ke為模糊控制變量調節比例因子;Ke為模糊執行運算后與設定值誤差變化率調節因子;Ku為執行輸出機構反饋量;G(s)為模糊控制反饋被控對象;系統輸出值為y(t)。以上這些變量都是精確量。其控制策略是先設定預估量和曲線/數據運行的上下限值,再根據經驗給出一個弓網控制提前量并根據這個提前量進行誤差修補(對標測量值和設計標準值)。但這樣難以滿足控制要求。假設,由于弓網系統幾何參數發生故障,若接觸網系統中出現暫態過電流,會導致出現非周期性的參數分量或小于N次諧波設定值的各種諧波分量。接觸網如果出現損壞,會導致弓網幾何參數出現劇烈波動,此時固有的接觸網模型會因測量誤差出現模型結構參數變化,誤差也會出現累計。因此,根據每次實際控制效果來辨識、在線校正下一次的控制測量值是一種較好的控制方案。

圖2 模糊控制系統方框圖
3 自適應數據融合算法和控制策略
弓網系統運行過程中,電弧與弓網的接觸壓力、偏移量、接觸線波動導高等參數的實時運行曲線反映了弓網接觸電流的輸入特征。由于弓網速度機械裝置存在慣性,導致數據傳輸存在滯后和不穩定。而受電弓緩沖會跟隨接觸線的波動而起伏接觸,保證弓網壓力滿足接觸網系統的安全電流供應。
若在弓網運行剛開始時即施加一個控制定量值,得出的結果和控制策略后期難以調節,此時輸入量和輸出關系具有非線性特征。可以根據自適應數據融合特點指定固有的參數模型,從而保證弓網運行主要參數值在合適的范圍內,保證安全運行的弓網速度和控制精度。
3.1 自適應控制的模型預估和特征
自適應控制需要結合數據融合的特點建立數學預估模型,其特點就是基于多個傳感器的信息采樣加以決策和估計,對輸出信號進行分析和處理[8]。接觸網系統中動態運行的弓網關系的幾何參數正是建立弓網模型所需的輸入融合變量。
若單個時間段采集的幾何參數具有模糊性和誤差性,也不會影響總體系統的可靠性。自適應會在數據融合過程中實時對數據進行跟蹤控制,并對信息數據進行校正。自適應數據融合在弓網系統幾何參數的計算和校正中具有以下特點:
(1)對接觸網和受電弓的動態運行時產生電弧造成的參數失真測試具有實時校正功能。在預防弓網系統出現電氣閃絡拉出值偏大造成斷線等方面,自適應控制具有預估校正的作用。
(2)通過弓網系統分布檢測,在線檢測暫態過電流,根據弓網系統的波動和誤差特性等研究手段,建立模糊控制為策略的數學模型具有優勢。
3.2 數據融合的原理與算法
由于接觸網系統動態運行產生的電弧現象會造成設備絕緣擊穿,特別是過電流和電壓增大,具備不確定的動態屬性和模型特征,如外部環境和曲線段弓網波動和拉出值的選取,包括一些未知因素和隨機因素。
對接觸網結構內部而言,描述弓網運行的模型結構和參數不一定準確。而外部環境對弓網運行的影響主要有噪聲、擾動、諧波等參數反饋至電網輸入系統,而測量和統計這些隨機量參數都是未知的。
自適應數據融合的校正原理是根據可以測量的輸入信號R(t)和輸出信號Yp(t)決定增益Kp和多項式Np(s),Dp(s)的系數估計[9]。其表達式有:
(1)
其中,M(s)是校正結果輸出參數;Np(s)是反饋模型的參數;Dp(s)是特征模型的參數。R(t)表示輸入信號、Yp(t)表示輸出信號、Kp表示增益,p(Primary)表示初始,即第一次接受參數校正模型的表達式。接觸網系統在線校正與計算建立在參數模型估計正確的基礎上,利用自適應數據融合能夠有效地補償與校正誤差,提高弓網系統整體辨識度[10]。當接觸網系統結構采樣參數na、nb和d已知時,輸入-輸出模型如式(2)所示:
A(q-1)y(t)=B(q-1)u(t-d)+e(t)
(2)
其中,A是設定弓網波動因子(取值在0~1之間);B是弓網參數校正因子(取值在0~1之間);q是弓網結構固定因子(取值q>1);u是誤差隨動因子(取值0~1之間);e(t)是誤差參量,即測量值減去上一次校正值的差數。其差分方程式如式(3)所示:
y(t)=-a1y(t-1)-a2y(t-2)-
…-any(t-na)+
b0u(t-d)+b1u(t-d-1)+
…+bnu(t-d-nb)+e(t)=
φT(t)θ+e(t)
(3)
其中,y(t)表示實際觀測值;e(t)表示弓網運行現場測量的不確定因素(如外部干擾、噪聲、諧波等)。φ(t)表示標準向量;θ表示需檢測的未知參數向量[11]。
(4)

接觸網系統運行產生的電弧現象,會造成絕緣設備沿邊放電,使暫態過電流和電壓增大,具備不確定的動態屬性和模型特征[12]。自適應數據融合的校正原理是,將上一區段的測量均值作為參考模型,對超出誤差部分進行校正。
4 與其他控制策略比較的優缺點
4.1 對比最小二乘法控制策略
最小二乘算法可針對動態特性變化多、參數波動大、難以直觀檢測出結果的情形,根據弓網系統運行特性及電弧放電特點,實時在線修正和優化決策,隨時調整系統模型結構。該算法的主要功能包括系統模型辨識、參數決策和參數修正。
如圖3所示,采用基于模糊控制理論集的自適應數據融合控制策略,對接觸網暫態過電流參數進行修正與擬合,分析計算修正誤差過程。其修正策略不要求參數全局都具備穩定性,只需要在誤差穩定和波動范圍局部保持良好的修正效果即可,因為多次的反復調節和修正會出現在線計算量大、反響時間增大與超調增大等問題。

圖3 局部優化弓網參數的超調和誤差波動特性
4.2 比較PID控制算法策略
傳統PID控制算法能對接觸網電弧沿邊放電參數進行檢測與調整,但其在線計算和修正誤差參數的功能不強[13]。而基于參數辨識的自適應數據融合則具有較強的修正、補償誤差的功能,可以彌補傳統PID控制算法功能的不足。
如圖4所示,傳統的PID控制算法結合了積分參數調節、微分控制反饋調節及比例調節的控制作用。而基于模糊理論集的自適應數據融合,具備基于模型識別的在線自學習滾動優化的特點,對結構和參數多變的預估模型要求不高,性能相對穩定,適用于模型多變、參數復雜和計算量大的長距離弓網運行與電能傳輸。
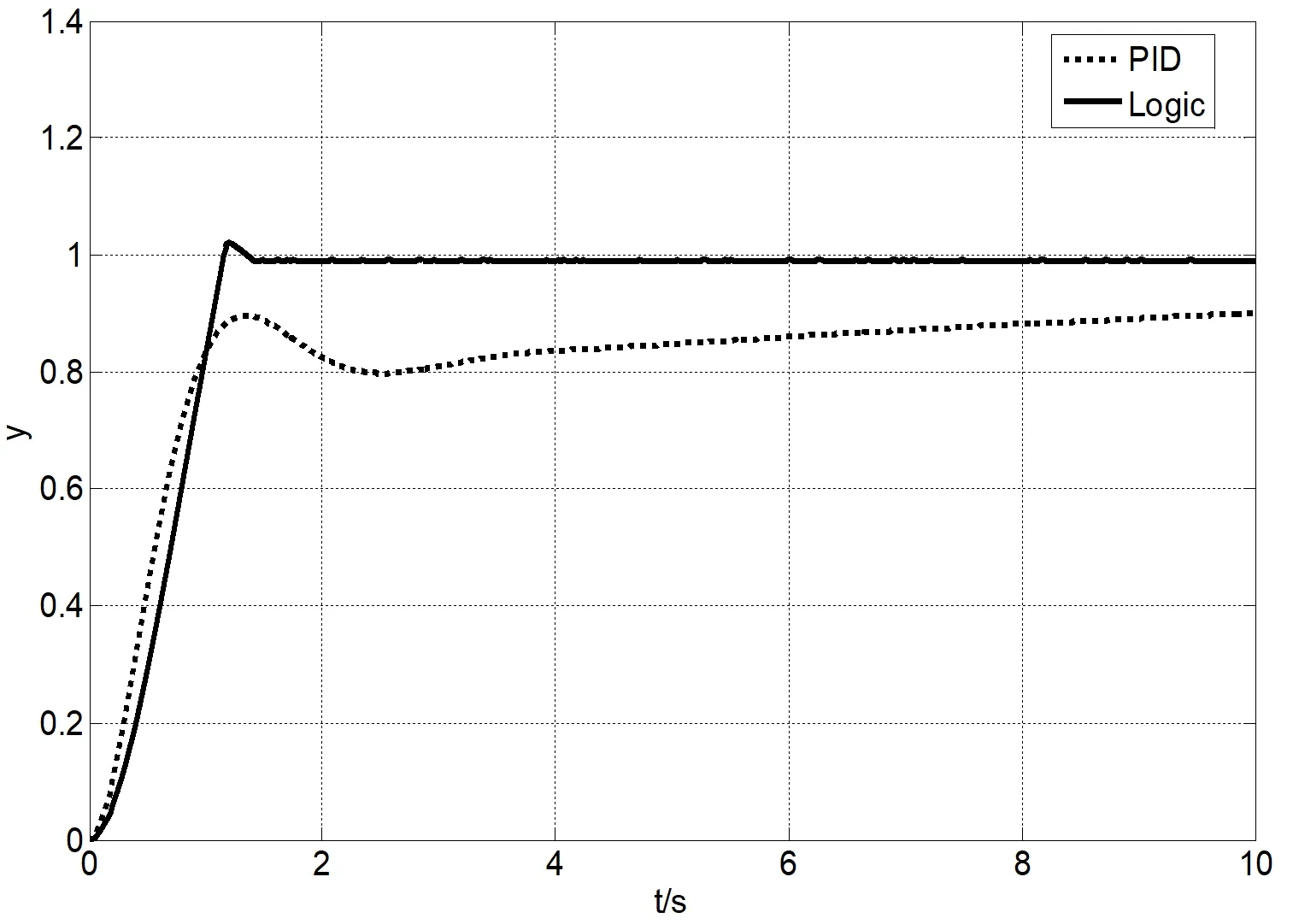
圖4 PID控制算法與自適應控制數據融合(Logic)比較圖
5 弓網實驗參數與建模分析
接觸網失真參數的自適應數據融合估計,由式(3)、式(4)得出的向量方程即為目標函數:
(5)

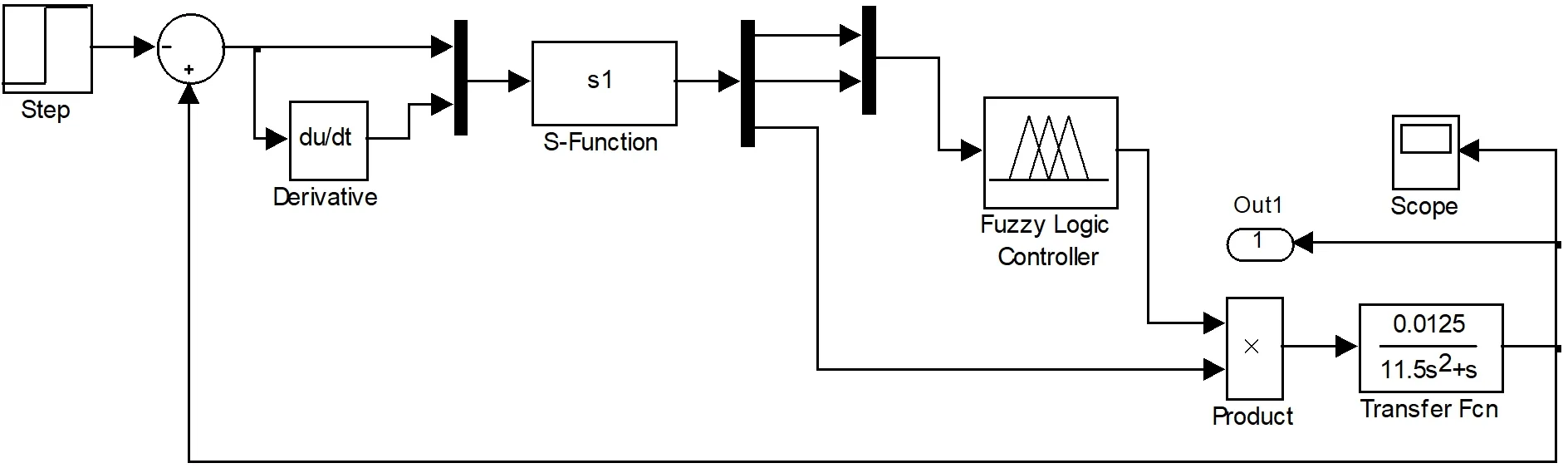
圖5 參數自適應模糊控制系統仿真SimuLink框圖

表1 模糊控制參數采樣輸入與融合數據誤差校正表

表2 模糊控制參數采樣輸入與融合數據誤差校正表

圖6 自適應原始采樣與校正后曲線對比(第一組參數)

圖7 模糊控制基礎下的自適應控制校正曲線(第二組參數)
表1中采樣參數與建模結構變化時,修正方法是根據差分公式3,若波動曲線遠離弓網運行設定曲線,即增大A因子,同時減小B因子,讓超調的曲線部分迅速回歸設定范圍。若修正曲線一直在設定范圍內,波動不明顯,無誤差產生,則維持A值不變,并逐步增大B因子參量,讓修正后的曲線與設定值同步[14],從而減少下一次誤差修正的時間和在線計算量。輸入量與測量值具有較大誤差時,需經過模型辨識后在線優化至合理范圍,保證弓網接觸良好的電流傳輸效果。
如圖6所示,模糊控制Simulink仿真結果顯示隨著參數外部環境的變化符合曲線圖衰減的關系,在調節范圍內滿足模型精度,校正效果無法與標準值完全相同。自適應控制的最大優勢就是跟隨性,設定目標后弓網運行會一直按照標準范圍的區間不斷校正實時運行中的誤差或偏差,讓系統始終跟蹤輸出結構進行控制,不需要建立明確的數學模型以得出準確的結果。這些都符合自適應數據融合的結構特點與原理。
自適應數據融合在線校正后誤差收斂速度更快、精度更高,但如果修正和優化擬合次數過多,容易造成接觸網模型結構失真和參數穩定性下降[15]。因此,自適應數據融合不是修正次數越多越好,而是依據參數模型與測量設定值,接近誤差范圍為止。這樣既不會造成弓網運行穩定性降低,也不會增加接觸網系統參數失真帶來的波動問題。
表2中,接觸網電弧時采樣參數暫態電流值具有變化和波動特性。輸入量與測量值具有較大的誤差,需經過模型辨識后在線優化至合理范圍,保證弓網接觸良好的電流傳輸效果。
如圖7所示,第二次參數校正的效果比第一次更好,誤差控制效果更接近設計值,說明其算法具有一定的局限性和擬合明確的目標值。由于外部環境干擾或內容參數結構發生變化,需要對接觸網模型和參數進行調整和匹配,直到誤差平方和性能指標接近[16]。一般而言,自適應數據融合只尋求將局部參數在線優化至最佳,而不是整個系統所有參數都要符合標準。
6 結論
文中針對接觸網系統結構中電能傳輸環節弓網關系進行研究,其動態運行時的幾何參數檢測精度直接影響著供電穩定和行車安全。分析表明,系統的弓網接觸壓力和幾何參數都具有波動性,難以固定運行區段的數學模型結構,從而導致獲取的幾何參數精度低,誤差控制效果不佳。再依此提出基于約束集的模糊控制,旨在建立復雜區段的弓網模型。利用該模型,不需要知道確切的輸入量,直接根據輸出結果校正輸入參數,將多傳感器采樣數據在數據融合的理念下進行整合,綜合分析判斷決策的過程。這樣雖然可以在很大程度上為弓網動態運行數據的實時采集和大量數據數據處理帶來便捷,但是也很難做到數據集合滿足所有的運行參數,只能在局部設定幾何參數的固有約束值,再去不斷校正和跟蹤,剔除誤差過大的數據,防止發生斷線風險。
基于模糊控制理論約束集的自適應數據融合控制,在弓網系統幾何參數的測量中,具有以下特點:(1)通過約束集的模糊控制策略可以按照設定的幾何參數跟蹤動態運行時的超量參數,并加以剔除和自動篩選功能,不需要建立準確的數學模型就可以得出控制結果;(2)由于外部環境或多變量的干擾,會造成模型失真或參數變化,自適應模型能夠不斷校正這些變化的幾何參數,使其能夠按照設定的標準范圍進行波動,滿足弓網系統安全穩定的電能傳輸特性,保障電力機車安全可靠運營;(3)弓網運行的最終目標是各項幾何參數都符合電能輸送的安全條件并處于誤差區間內,多傳感采樣的實時數據能夠自動進行融合分析判斷和綜合決策控制。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
工業設計(2022年8期)2022-09-09 07:43:20
今日農業(2021年19期)2022-01-12 06:16:36
中老年保健(2021年11期)2021-08-22 03:15:44
中學生數理化(高中版.高考數學)(2021年1期)2021-03-19 08:28:38
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
現代出版(2020年3期)2020-06-20 07:10:34
數學物理學報(2020年2期)2020-06-02 11:29:24
