基于MEMS諧振式氣壓傳感器的數(shù)字高度計研制
2023-10-25 01:12:14范賢光冒海凌許英杰
傳感器與微系統(tǒng) 2023年10期
范賢光,冒海凌,王 昕,許英杰
(1.廈門大學(xué) 航空航天學(xué)院,福建 廈門 361000;2.廈門大學(xué) 福建省傳感技術(shù)重點實驗室,福建 廈門 361000)
0 引 言
高度是導(dǎo)航定位系統(tǒng)中的重要信息,對載體的安全和控制具有十分關(guān)鍵的作用。目前測量高度的手段有激光雷達、全球衛(wèi)星定位和氣壓高度計等。激光雷達通過向目標(biāo)發(fā)射激光束并接收反射回波進行處理從而測量距離,測距精度能夠達到厘米(cm)級,但其量程較小,一般只能達到百米(m)級,工作時受天氣和大氣影響較大,只能在較小的范圍內(nèi)進行定位[1]。全球衛(wèi)星定位系統(tǒng)能夠提供全天候的空間坐標(biāo),但用戶機至少需要接收到4 顆衛(wèi)星的信號才能實現(xiàn)定位,而且其高程定位精度較差,單點型衛(wèi)星定位在同一位置的高程誤差最大能達到十幾米,在實際使用時還易受障礙物影響[2]。慣性導(dǎo)航系統(tǒng)的輸出信息中也能提供高度信息,但其高程定位只能維持短時間內(nèi)的精度,其天向的定位誤差會隨時間呈現(xiàn)指數(shù)級發(fā)散[3]。氣壓高度計利用大氣靜壓與高度的關(guān)系,通過觀測氣壓測量載體的海拔高度[4],其不向外輻射信息,量程大(可達20 000 m),不受地形影響,能夠很好地輔助導(dǎo)航,常用于作為量測修正慣性導(dǎo)航高度通道的誤差,受到了廣泛的應(yīng)用和研究。
目前氣壓高度計采用的氣壓測量傳感器主要有機械式和MEMS氣壓傳感器等。機械式氣壓傳感器體積大、精度低、結(jié)構(gòu)復(fù)雜,逐漸已經(jīng)難以滿足飛行器使用要求。而MEMS氣壓傳感器根據(jù)測量原理可以分為壓阻式、電容式和諧振式等。其中,MEMS 諧振式壓力傳感器通過感知敏感芯體的固有頻率間接測量壓力,是目前精度最高的硅微壓傳感器[5]。與傳統(tǒng)的機械式、壓敏式、電容式壓力傳感器相比,諧振壓力傳感器還具有更小的體積和更高長期穩(wěn)定性。
因此,本文基于一種自主研發(fā)的MEMS 諧振式壓力傳感器,設(shè)計了一種高精度、可靠性強的數(shù)字高度計,其氣壓測量在全溫范圍(-40~80 ℃)內(nèi)都能保持的優(yōu)良工作特性,經(jīng)過濾波和高度補償后,具有良好的高程定位精度。
1 系統(tǒng)硬件設(shè)計
1.1 系統(tǒng)構(gòu)成
數(shù)字高度計主要由MEMS 諧振式壓力傳感器、信號調(diào)理采集模塊、主控模塊和電源模塊4個部分組成,系統(tǒng)結(jié)構(gòu)如圖1所示。
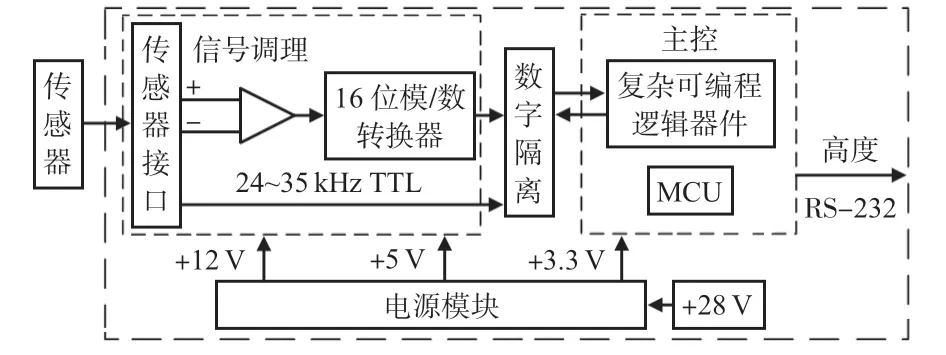
圖1 系統(tǒng)結(jié)構(gòu)框圖
傳感器采集當(dāng)前時刻大氣靜壓數(shù)據(jù);信號調(diào)理采集模塊采集傳感器輸出的電壓信號和頻率信號;電源模塊將輸入電平轉(zhuǎn)換為系統(tǒng)供電電平;主控模塊驅(qū)動采集并計算高度輸出。
1.2 諧振式壓力傳感器
所采用的MEMS 諧振式微壓傳感器其敏感芯體及其驅(qū)動檢測電路如圖2所示。傳感器基于MEMS圓片級集成制造工藝,突破深硅腐蝕與刻蝕、片級堆疊鍵合、高真空圓片級封裝和跨層電極一次成型等技術(shù),進行工藝串聯(lián)及流片,采用靜電激勵的工作方式,結(jié)合自動增益控制(automatic gain control,AGC)自激振蕩電路完成封裝。其壓力測量范圍為絕壓2~350 kPa,工作溫度-40~80 ℃,精度和年穩(wěn)定性優(yōu)于0.02%FS,傳感器的壓力信號輸出形式為24~35 kHz的晶體管—晶體管邏輯(transistor-transistor logic,TTL)方波信號,靈敏2.84 Hz/hPa,溫度輸出為模擬電壓信號,電壓輸出范圍400~700 mV,靈敏度-2.12 mV/℃。
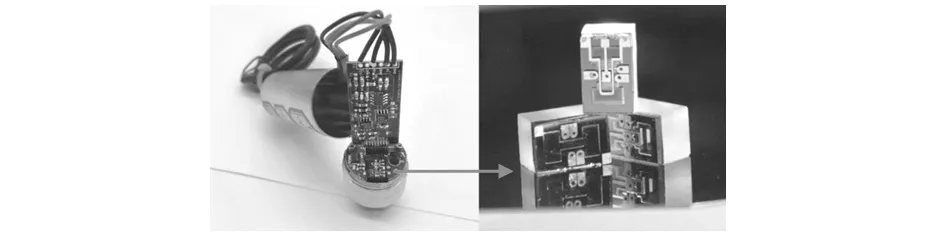
圖2 傳感器及其芯體
1.3 信號調(diào)理采集模塊
直接采集傳感器輸出的頻率信號和電壓信號容易受到振蕩電路的高頻信號干擾造成測量誤差,因此需要對傳感器輸出信號進行預(yù)處理。傳感器的頻率信號經(jīng)過數(shù)字隔離器后由復(fù)雜可編程邏輯器件(complex programmable logic device,CPLD)模擬的數(shù)字頻率計采集;傳感器的電壓信號經(jīng)過二階有源低通濾波器調(diào)理后,再由16 位模/數(shù)(A/D)采集輸出到CPLD。
1.4 電源和主控模塊
一般飛行器上的供電為直流+28 V,因此電源模塊采用寬輸入、模擬數(shù)字全隔離的DC-DC +低壓差(low dropout,LDO)線性穩(wěn)壓器方案,傳感器及其信號調(diào)理電路為模擬12 V和5 V供電,主控CPLD和MCU為數(shù)字3.3V供電。主控模塊采用CPLD +MCU方案,CPLD選用具有128 個等效宏單元,能夠滿足數(shù)字高度計資源和體積要求的集成芯片。其主要功能是驅(qū)動AD時序采集經(jīng)兩級信號調(diào)理的傳感器電壓信號,并且在內(nèi)部集成了數(shù)字頻率計采集傳感器的頻率信號。MCU 選用高性能處理器STM32,該MCU 集成了數(shù)字信號處理器(digital signal processor,DSP)核,主頻高達480 MHz,能夠滿足氣壓傳感器溫度補償、氣壓高度轉(zhuǎn)換和數(shù)字濾波等浮點數(shù)計算需求。
2 軟件設(shè)計
2.1 軟件主流程
系統(tǒng)工作流程如圖3 所示,系統(tǒng)上電后,先進行CPLD和MCU初始化操作,使能IO、外設(shè)、通用異步收發(fā)器(universal asynchronous receiver/transmitter,UART)和定時器等模塊,上位機輸入標(biāo)高并發(fā)出采集命令后,在測量周期內(nèi),CPLD驅(qū)動AD和數(shù)字頻率計采集傳感器輸出的電壓信號和頻率信號后,將數(shù)據(jù)通過柔性制造單元(flexible manufacturing cell,F(xiàn)MC)寫入到MCU 中;MCU 先將電壓信號和頻率信號擬合成氣壓值,經(jīng)過無限脈沖響應(yīng)(infinite impulse response,IIR)濾波后,MCU再將氣壓換算成不同基準(zhǔn)面下的高度信息,通過RS—232接口輸出。
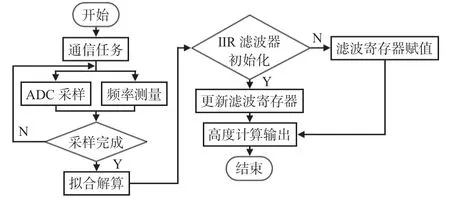
圖3 系統(tǒng)工作流程
2.2 傳感器輸出頻率測量
在CPLD內(nèi)部模擬了個數(shù)字頻率計對傳感器輸出的頻率信號進行測量。為保證測量傳感器頻率信號輸出范圍內(nèi)測量精度的一致性,消除直接對測量信號計數(shù)產(chǎn)生的±1誤差,采用間接計數(shù)的方法測量頻率。其原理如圖4所示。
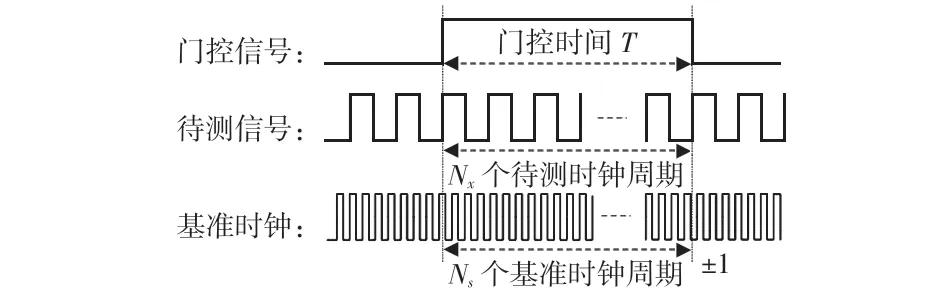
圖4 頻率測量原理
利用待測信號Ns產(chǎn)生待測閥門信號,取門控時間T為Nx個待測時鐘fx的周期,在門控時間內(nèi),對基準(zhǔn)時鐘信號fs的計數(shù)結(jié)果為Ns,則有τ =Nx/fx=Nx/fs。忽略基準(zhǔn)時鐘信號本身的誤差,則測量誤差主要來源于對基準(zhǔn)時鐘信號計數(shù)產(chǎn)生的±1的誤差,相對誤差為σ =1/(τ·fs)。
在整個測量過程中,精度都是相等的,基準(zhǔn)時鐘信號足夠大時,能夠得到比較精確的頻率測量結(jié)果。諧振式壓力傳感器輸出的頻率信號為24~35 kHz,取基準(zhǔn)時鐘信號為50 MHz溫度補償晶振的時鐘信號,門控時間為200 個待測時鐘周期,則在傳感器頻率fx=30 000 Hz的實例下,計數(shù)器計數(shù)值為333 333 或者333 334,由此轉(zhuǎn)換的頻率值為30 000.03 Hz和29999.94 Hz,相對誤差不超過0.0002%,測量時間不超過7 ms,滿足使用需求。
2.3 傳感器溫度補償擬合
溫度補償[6]多項式如下
式中 P計算的氣壓值,Cij為擬合系數(shù),f 為傳感器輸出的頻率信號,v 為傳感器輸出的電壓信號,m 和n 為擬合階數(shù),一般取m =4,n =5。
2.4 壓力數(shù)據(jù)濾波
在氣壓高度轉(zhuǎn)換之前,為了減小傳感器在測量氣壓時受到短時干擾帶來的誤差,如晃動、氣流干擾等等,應(yīng)該先進行濾波處理。實驗表明IIR濾波器能夠有效地降低輸出信號的帶寬,濾波公式如下
式中 Pk為當(dāng)前時刻量測值,P′k-1為上一時刻濾波值,P′k為當(dāng)前時刻濾波器輸出結(jié)果,α為濾波器系數(shù)。
2.5 氣壓高度轉(zhuǎn)換
根據(jù)大氣靜力學(xué)方程,在11 000 m以下時,有如下壓高公式[7]
式中 Tb,Pb,Hb分別為起始基準(zhǔn)面的溫度(K)、壓強(Pa)和高度(m);β為溫度垂直變化率(K/m);R 為空氣氣體常數(shù),取287.052 87;gn為重力加速度;Pm,Hm為待測點壓強和相對高度。在11 000 m 以下時,溫度垂直變化率β 取-6.5 K/km。
在標(biāo)準(zhǔn)大氣條件下的海平面處,有Hb=0,Tb=T0=288.15 K,Pb=P0=101.324 kPa代入壓高公式所求高度即為標(biāo)準(zhǔn)海平面高度。
中國以青島驗潮站多年觀測到的黃海平均海平面作為同一的高程基準(zhǔn)[8]。由于在不同的海拔高度上承受大氣柱長度不同,一般需要將場面氣壓按照標(biāo)準(zhǔn)氣壓條件修正到平均海平面上,由此得到載體相對于海平面的實際高度。修正海壓QNH可以由場壓QFE級場壓處標(biāo)高z按以下公式修正[9]
在測量范圍內(nèi)(0 ~11 000 m)可以認為溫度垂直變化率β不變[10],在同一地點,根據(jù)公式,標(biāo)準(zhǔn)海壓高H =f(T0,P0),在實際海平面參數(shù)(T′0,P′0)下有H′=f(T′0,P′0)。令H′=f(T′0,P′0),在(T0,P0)處進行二元泰勒展開有
取上式的一階泰勒展開近似,則由實際海平面氣壓、溫度條件引起的高度誤差為
3 實驗結(jié)果與分析
3.1 壓力測試實驗與分析
所設(shè)計的數(shù)字氣壓高度計如圖5所示,電路采用雙層結(jié)構(gòu)設(shè)計,上層為主控模塊和通信接口,下層為電源模塊和傳感器信號測量模塊,整體體積約為70 mm×40 mm×35 mm。
圖5 數(shù)字高度計實物
在數(shù)字高度計使用前首先在地面對其進行全溫全壓標(biāo)定,將傳感器放入恒溫箱中,恒溫箱設(shè)置溫度范圍-40~80 ℃,測量步長為10 ℃,測量時間間隔不小于2 h。傳感器接至標(biāo)準(zhǔn)氣壓源,氣壓源精度為±1 Pa,設(shè)置壓力輸出為2~350 kPa,取36個測壓點。取每個測量點3 min的傳感器輸出頻率及電壓的平均值,經(jīng)溫度補償擬合后的壓力曲面及誤差如圖6所示。傳感器輸出頻率和電壓的擬合曲面能夠均勻地過渡,且最大壓力誤差小于0.02%FS。

圖6 壓力測試結(jié)果
3.2 氣壓高度轉(zhuǎn)換實驗與分析
在廈門大學(xué)翔安校區(qū)及其周邊香山地區(qū)進行了靜態(tài)、動態(tài)實驗。實驗過程中,測得起始點處氣壓為101.916 kPa,標(biāo)高取GPS 在差分工作模式下且垂直定位因子VDOP =0.5時的輸出高度11.4 m。在4 個不同海拔的地點分別進行了300 s的靜態(tài)實驗,其中在113.2 m海拔左右的測量點處有較多樹木遮擋,數(shù)字高度計測量值和GPS高度的對比分別如圖7所示。從圖7中可以看出,靜態(tài)測量時,數(shù)字氣壓高度計在全部測量位置表現(xiàn)出良好的輸出精度和穩(wěn)定性,在測量時間內(nèi)的最大誤差約0.8 m,而GPS的輸出高度在有遮擋時,誤差較大,最大達到12.5 m。
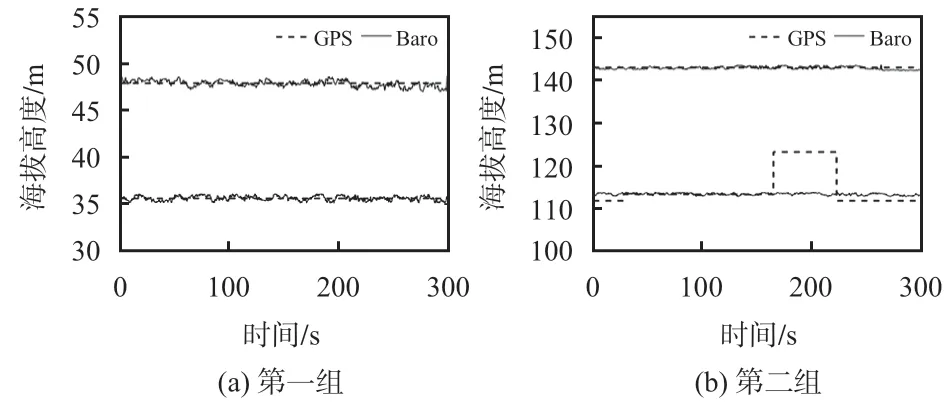
圖7 數(shù)字高度計輸出與GPS高度輸出對比
動態(tài)實驗數(shù)據(jù)來源于沿廈門大學(xué)翔安校區(qū)及香山的車載實驗,行車時長為3 500 s,行駛總里程為31.28 km,在百度衛(wèi)星地圖下的二維行駛軌跡及參考等高面如圖8 所示,公開的測繪數(shù)據(jù)顯示,該區(qū)域最低點約為6.09 m,最高點約為187.71 m。

圖8 行駛軌跡及等高面
動態(tài)實驗結(jié)果如圖9 所示,行駛過程中在山中會有樹木遮擋,與單點GPS 輸出的高度結(jié)果相比,數(shù)字氣壓高度計在整個行駛過程中的野點更少,相對于公開的測繪數(shù)據(jù),數(shù)字高度計的輸出結(jié)果與登高線誤差也更小。
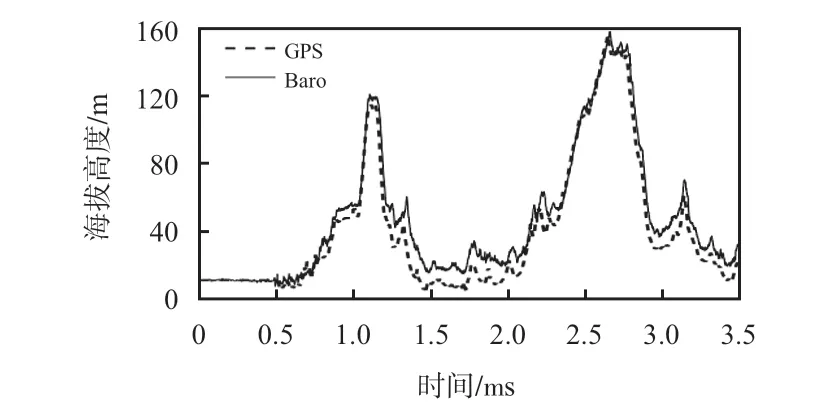
圖9 動態(tài)測試結(jié)果比較
4 結(jié) 論
基于一種自主研發(fā)的高精度MEMS 諧振式壓力傳感器設(shè)計了數(shù)字高度計,對數(shù)字高度計的硬件設(shè)計、軟件設(shè)計進行了詳細的研究和介紹。為了驗證此數(shù)字高度計的可行性,進行了全溫全壓實驗、氣壓高度轉(zhuǎn)換的靜態(tài)實驗和動態(tài)實驗。實驗結(jié)果表明:所研制的數(shù)字高度計具有良好的精度和穩(wěn)定性,高程定位誤差小于0.8 m,且在室外環(huán)境無使用限制,在衛(wèi)星等其他高程定位手段失效時,能夠起到很好的輔助導(dǎo)航定位作用,具有較高工程應(yīng)用價值。
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
中學(xué)生數(shù)理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學(xué)生數(shù)理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中國生殖健康(2019年3期)2019-02-01 06:12:26
中學(xué)生數(shù)理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數(shù)學(xué)小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
少兒科學(xué)周刊·兒童版(2016年1期)2016-03-14 03:52:21
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
海軍航空大學(xué)學(xué)報(2015年3期)2015-11-11 17:20:00
