船舶電力推進系統螺旋槳負載特性半實物仿真平臺研究
2023-10-16 08:40:08胡紅錢施偉鋒謝嘉令
黑龍江科學 2023年18期
胡紅錢,施偉鋒,謝嘉令
(1.浙江工業職業技術學院 機電工程學院,浙江 紹興 312000; 2.上海海事大學 物流工程學院,上海 201326)
0 引言
船舶在水中航行的動力實質是推進電機推動螺旋槳負載旋轉產生扭矩以克服水阻力形成反作用力而前進,船舶本體、船舶推進電機及螺旋槳構成了船-機-槳的有機整體,而船-機-槳的有效配合將直接關系船舶運行效率及能量轉換優劣[1]。
相較于將螺旋槳放入一個封閉循環的水池中,采用電機模擬不同工況下螺旋槳負載的電力推進半實物仿真平臺可省去螺旋槳及水池,降低實驗室的環境要求及制造成本[2],負載控制更逼真,數據采集與管理更方便。船機槳半實物仿真平臺充分利用數字仿真技術將船機槳理論模型形成有效的數字仿真平臺[3-5],通過實物軟硬件完成對船機槳的控制[6],對構建的半實物推進系統進行運行參數獲取與有關試驗效果的實時跟蹤。
1 半實物仿真平臺架構與船機槳模型
1.1 半實物仿真平臺架構與硬件實現
船機槳半實物仿真平臺采用柴油發電機組構成的獨立電力系統為其供配電,模擬其在獨立微電網中的工作狀態。仿真平臺推進電機采用永磁同步電機,模擬螺旋槳負載采用三相異步電機,二者通過法蘭連接,其上設有轉速與轉矩傳感器,進行相關參數實時檢測。兩個電機分別由變頻器與伺服控制器控制,由船舶電力系統配電網絡與市電供電(如圖1)。整個平臺受琴臺機旁控制與駕駛艙集中控制兩種方式控制,其中控制琴臺與電機控制器、船舶電力系統聯網完成對永磁同步電機與三相異步電機的控制、螺旋槳槳敞水工況特性模擬及數據分析、故障檢測等。
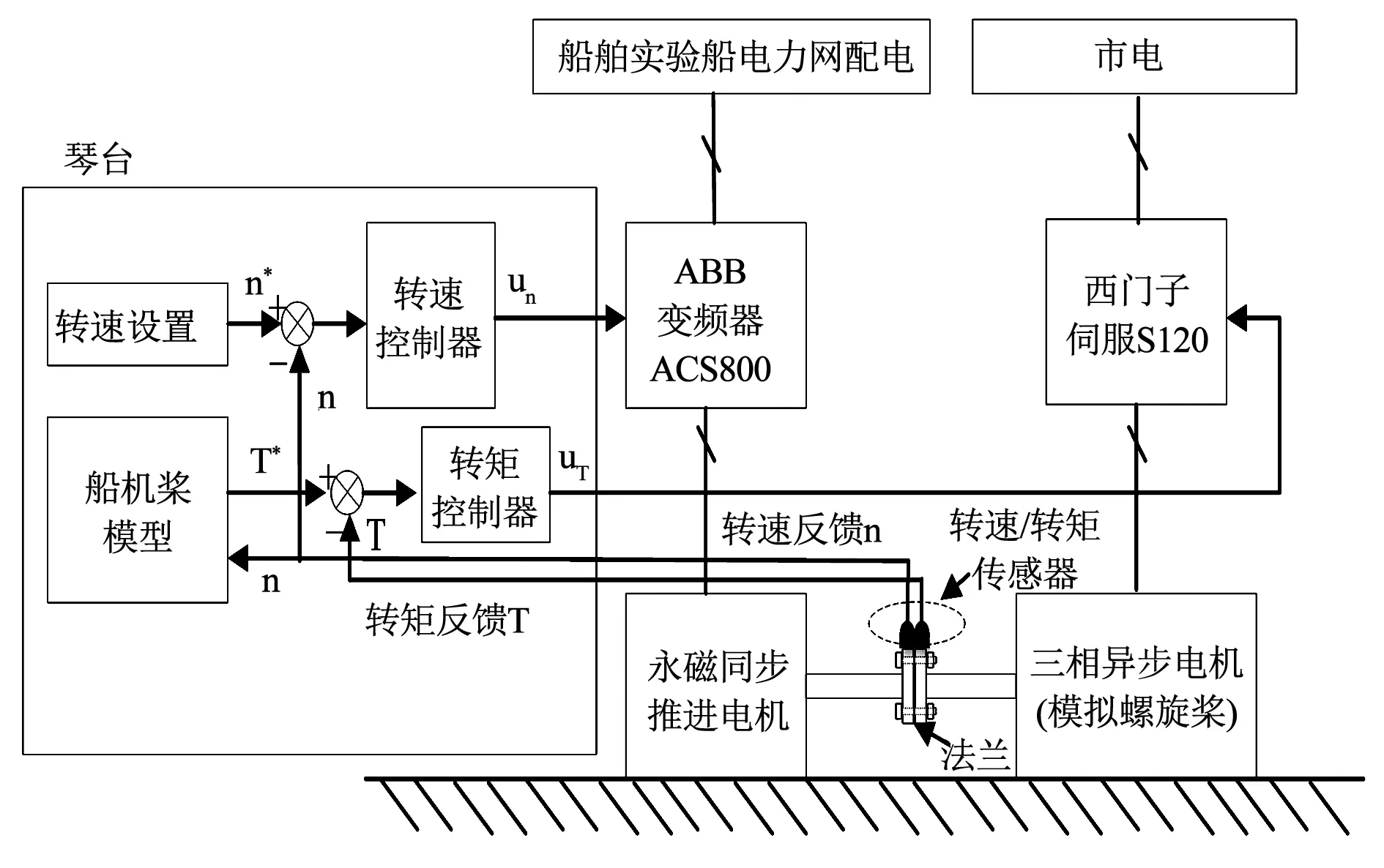
圖1 仿真平臺架構Fig.1 Simulation platform structure
平臺實物環境如圖2,其中圖2a為推進電機與螺旋槳負載模擬電機,圖2b為推進電機與螺旋槳負載模擬電機的供電與驅動系統,圖2c為控制琴臺。平臺主要設備型號與參數如表1。
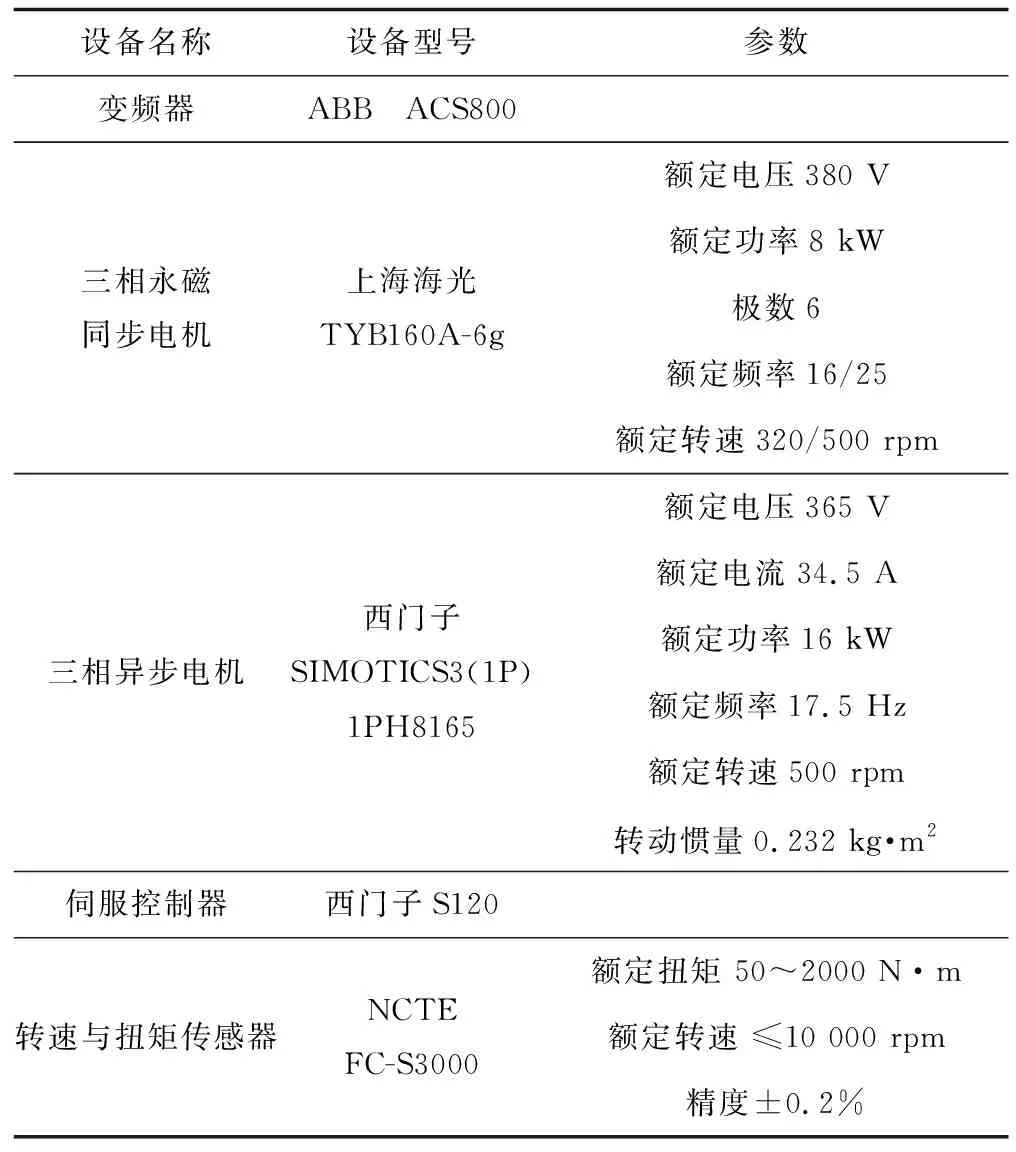
表1 仿真平臺主要設備型號與參數Tab.1 Main equipment models and parameters of simulation platform

圖2 仿真平臺硬件Fig.2 Simulation platform hardware
1.2 半實物仿真平臺船機槳模型
根據工作母船螺旋槳四象限動態工作數學模型、軸系旋轉運動特性及水動力特性可獲得螺旋槳的推力系統數Kp、扭矩系數Km及進速比J′,由此獲得(1)~(7)方程描述[7]與如圖3所示的船機槳數學模型。
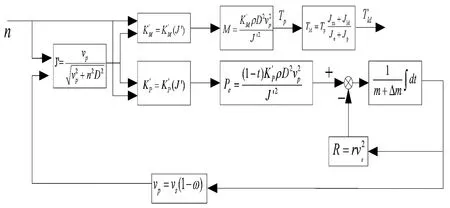
圖3 仿真平臺船機槳模型Fig.3 Simulation platform ship engine paddle model
進速比:

(1)
推力系數:
(2)
扭矩系統:
(3)
推力減額系數:
t=(P-Pe)/P
(4)
螺旋槳有效推力:
Pe=(1-t)P
(5)
船槳運動方程:
(6)
船體總阻力:
(7)
其中,n為螺旋槳轉速,單位r/s;vp為螺旋槳進速,單位m/s;vs為船速,單位m/s;ω為半流系數;D為螺旋槳直徑,單位m;P為螺旋槳推力,單位N;M為螺旋槳扭矩,單位N·m;ρ為海水密度,單位kg/m3;r為船舶總阻力系數;R為船舶總阻力,單位N。由文獻[4]確定r、ω、t值及Kp(J′)、KM(J′)。
為滿足仿真平臺盡可能接近工作母船,仿真平臺的推進部分與仿真母船的推進部分必須具有相同的動態過程[8],故永磁同步電機與三相異步電機均采用矢量控制方式從仿真平臺負載電機轉矩與轉動慣量及仿真母船螺旋槳的實際轉矩和轉動慣量關系入手,推導慣性轉矩補償。
Te-Tp=(Je+Jp)(2π/60)(dn/dt)
(8)
Tm-Tld=(Jm+Jld)(2π/60)(dn/dt)
(9)
式中,Te、Tp、Je、Jp、Tm、Tld、Jm、Jld分別是仿真母船的推進電機電磁轉矩、螺旋槳轉矩、推進電機轉動慣量、螺旋槳轉動慣量、仿真平臺的推進電機電磁轉矩、螺旋槳負載電機轉矩、推進電機轉動慣量、螺旋槳負載轉動慣量。
聯合式(8)、式(9)比較,要滿足可對等仿真條件,則仿真平臺螺旋槳模擬負載轉矩與仿真母船螺旋槳轉矩間必須滿足比例:
(10)
(11)
模型中輸入量是螺旋槳的轉速與船速,輸出量是推進電機軸轉矩,而在運動初始狀態給定條件下船速可根據船槳模型獲得,故可只設定螺旋槳轉速。相較于母船模型,仿真平臺的船機槳模型存在補償與系數部分,如圖3。
2 半實物仿真平臺數字化實現
2.1 數據檢測與分析硬件
為配合仿真平臺數字化需要,系統設計了數據檢測與分析子系統。子系統有兩條數據通道往駕駛艙集中控制,一條是以交換機為中心,與網關和現場控制PLC相連,網關負責傳輸協議轉換、數據通信與傳遞,通過現場總線連接智能電能參數測量儀,采集經過初級計算分析的數據。現場控制PLC通過IO口連接現場執行設備與檢測設備,并將數據送入PLC及網關、上位機等進行信息通信、計算處理、數據顯示、邏輯判斷、運行控制等。另一條是以PCI數據采集卡為中心,與NI數據接線盒連接,采集盒與現場變送器、傳感器相連,采集原始的波形信號數據。PCI卡裝入上位機,其上運行LabView、Matlab、VB、web服務等高級數據分析與故障診斷軟件,通過以太網與整個船舶系統互聯,配合完成船舶系統管理與推進系統的控制與監視,令系統更加完善與靈活,實現對系統的參數監視、工況顯示、故障分析與診斷,如圖4所示。
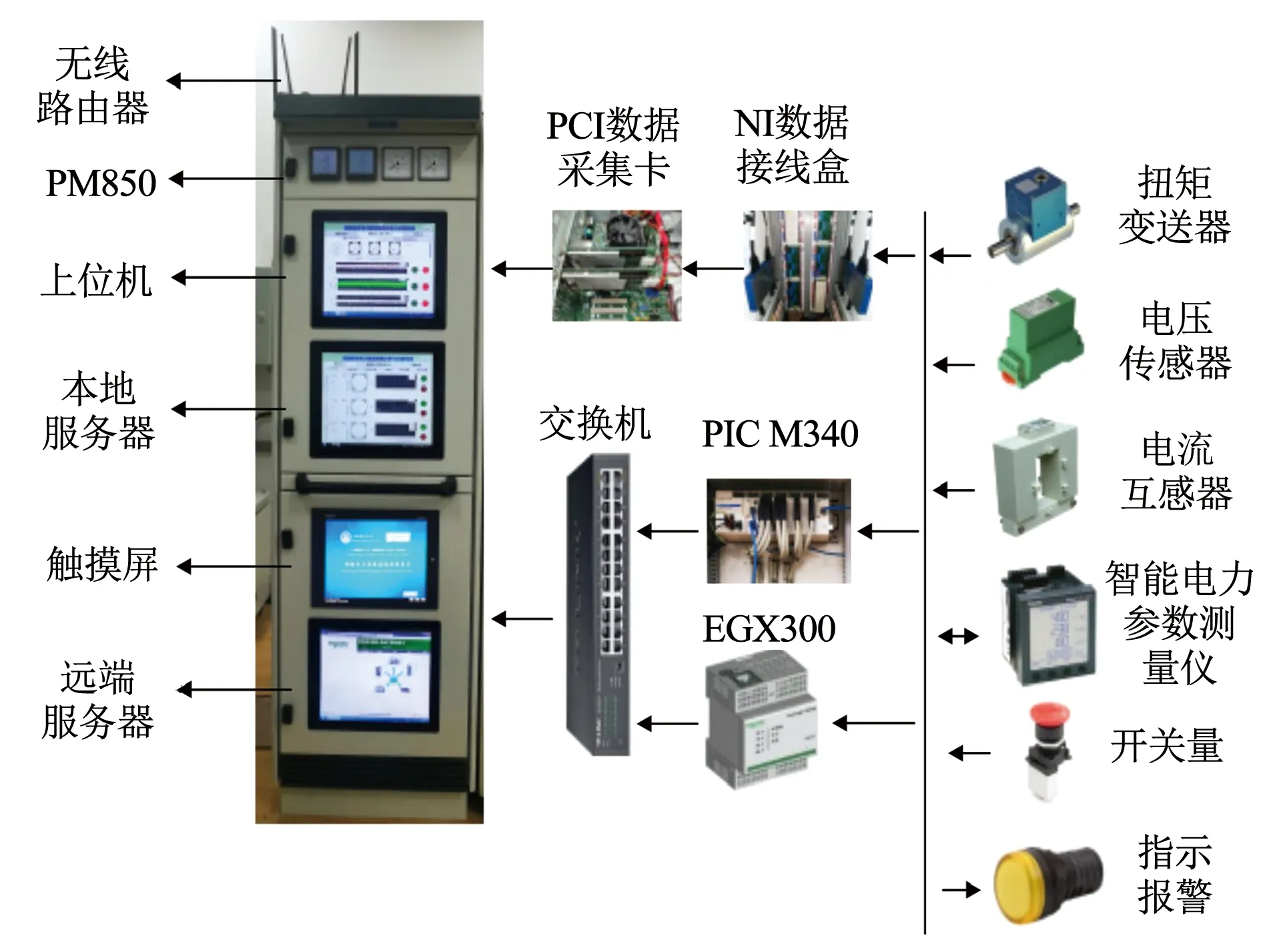
圖4 數據檢測與分析子系統硬件Fig.4 Data detection and analysis subsystem hardware
2.2 數字化仿真軟件
電力推進系統螺旋槳半實物仿真平臺數字化部分主要包括永磁同步推進電機的控制與三相異步電機螺旋槳負載特性的模擬,其中,螺旋槳負載特性模擬是船舶電力推進系統半實物仿真平臺數字化的關鍵[9],其與圖2中的驅動系統聯合完成半實物仿真。平臺船機槳模型如圖3,結合圖1螺旋槳負載特性仿真平臺架構,采用轉矩閉環控制,包括計算轉矩給定、轉矩轉速測量、慣性轉矩補償、轉矩調節與控制、伺服控制器等。本仿真平臺母船參數參考某電力推進豪華郵輪如表2,對應的母船螺旋槳敞水特性數據如表3。
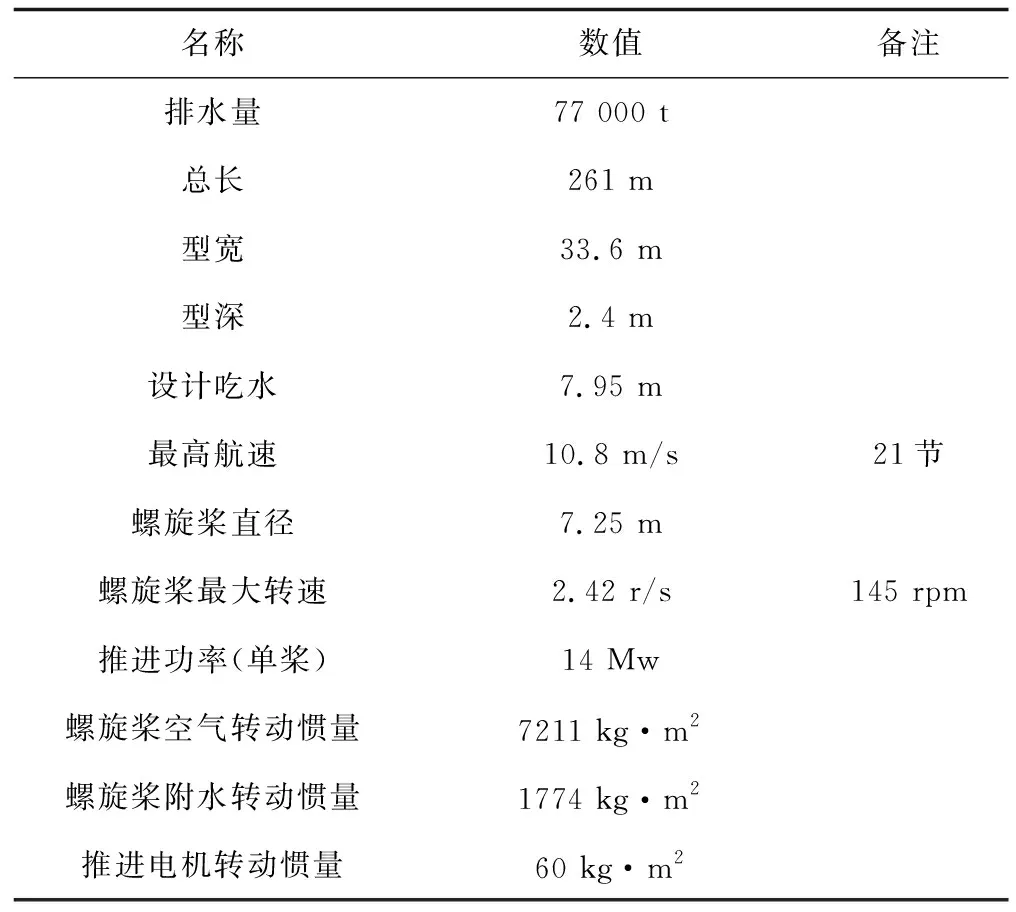
表2 仿真母船基本參數Tab.2 Simulation of basic parameters of mother ship
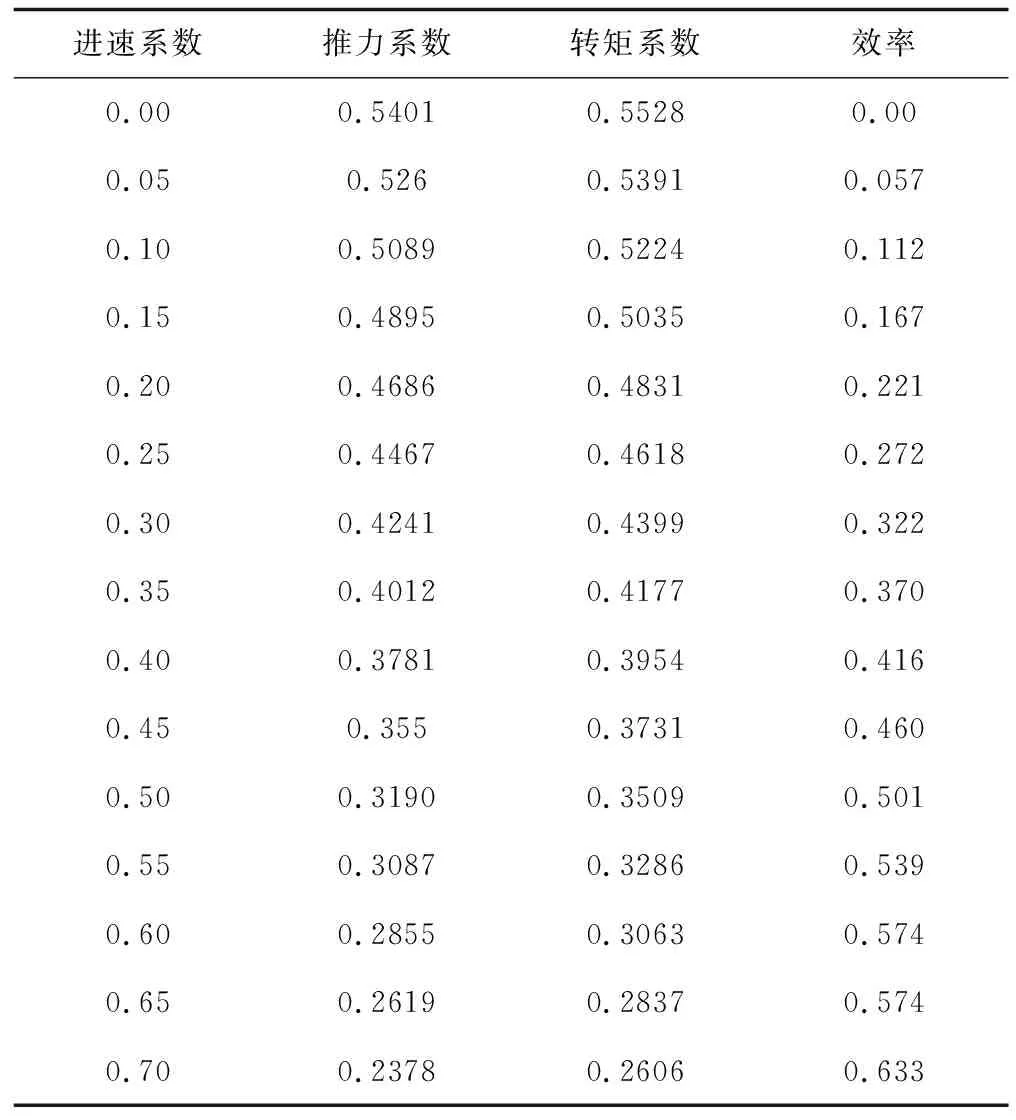
表3 螺旋槳尚水特性數據Tab.3 Water performance data of propeller
通過工作母船實測數據MATLAB的polyfit函數5次擬合,得到如圖5所示的工作母船螺旋槳敞水特性曲線。
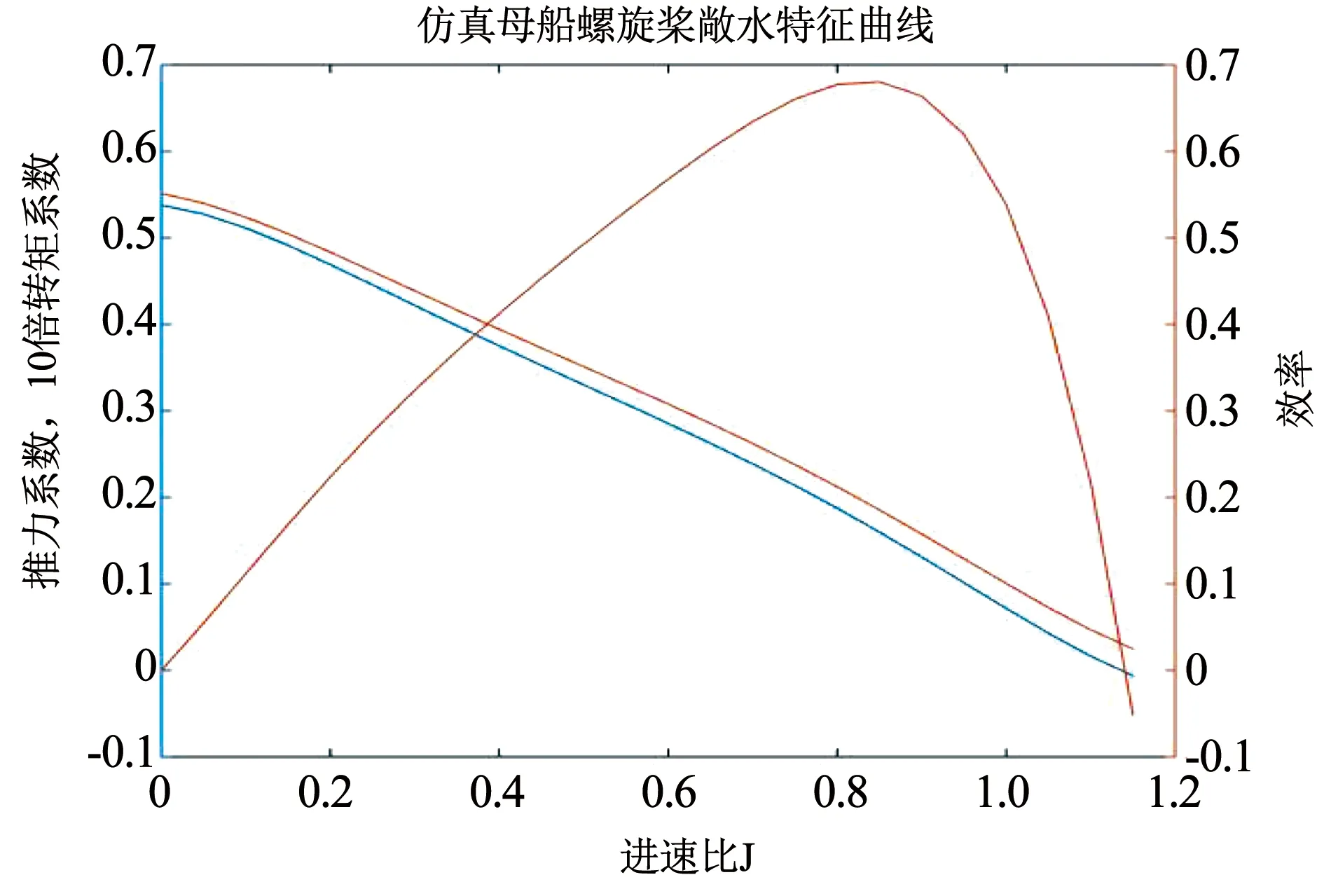
圖5 工作母船螺旋槳摻水特性曲線Fig.5 Characteristics curve of working mother ship propeller water
對于給定螺旋槳,螺旋槳轉矩特性與推力特性是最重要的兩個螺旋槳負載特性。不同的進速比J′下,轉矩與轉速n2構成一簇平方關系的曲線,而在一定的進速比J′下,推力和轉矩系數為常量。根據曲線螺旋槳進度比可確定推力系統數Kp、扭矩系數Km,結合相關參數可獲得仿真平臺負載電機轉矩輸出,從而在轉速給定值情況下通過琴臺工控機設定,通過VB軟件解析仿真平臺船機槳模型完成平臺數字化。
3 平臺測試結果
根據以上分析,取螺旋槳進速比J=0.75的情況下,根據海水密度ρ=1025.91 kg/m3,確定Kp=0.2132、Km=0.2370,獲得工作母船的螺旋槳轉矩特性與功率特性曲線,如圖6。
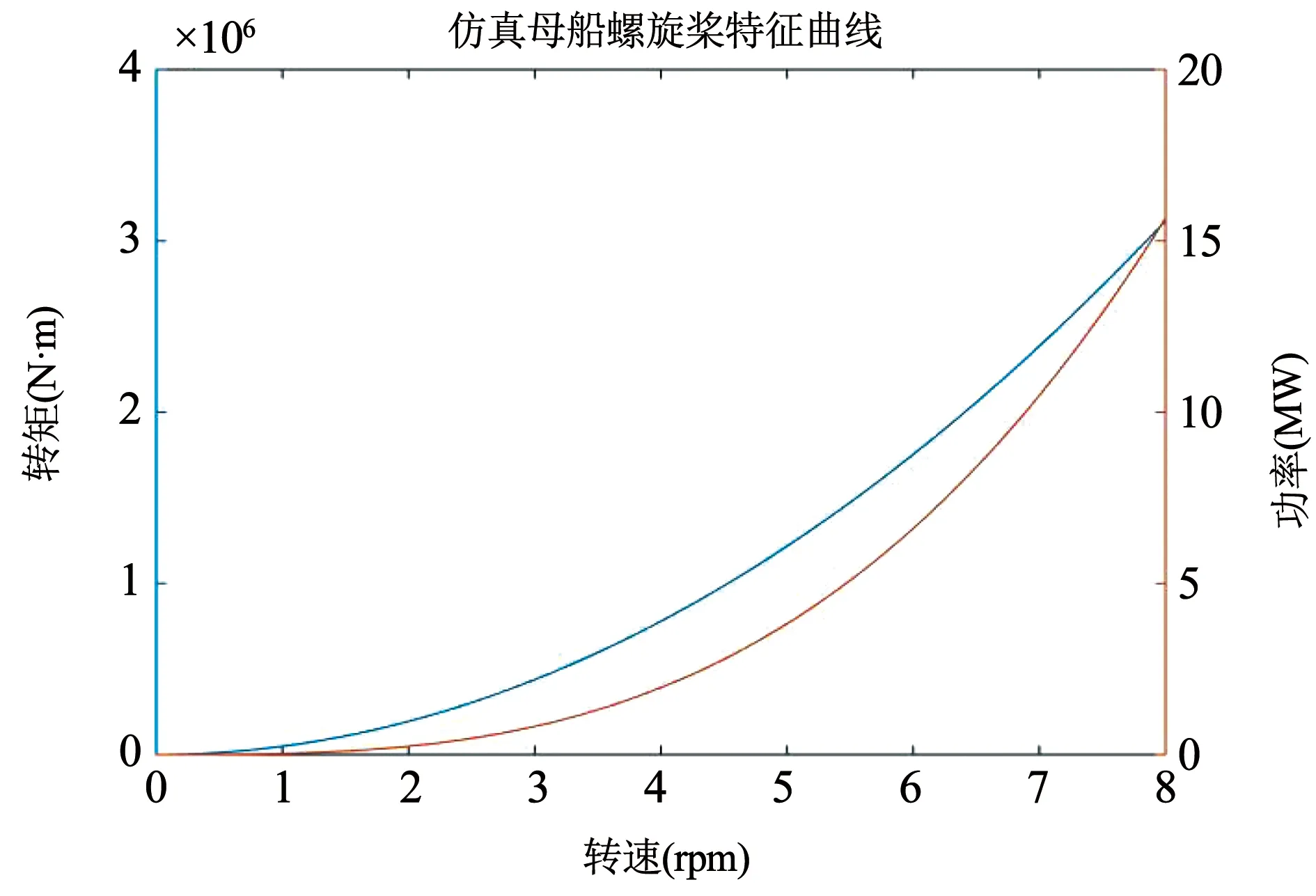
圖6 工作母船螺旋槳特性曲線Fig.6 Propeller characteristic curve of working mother ship
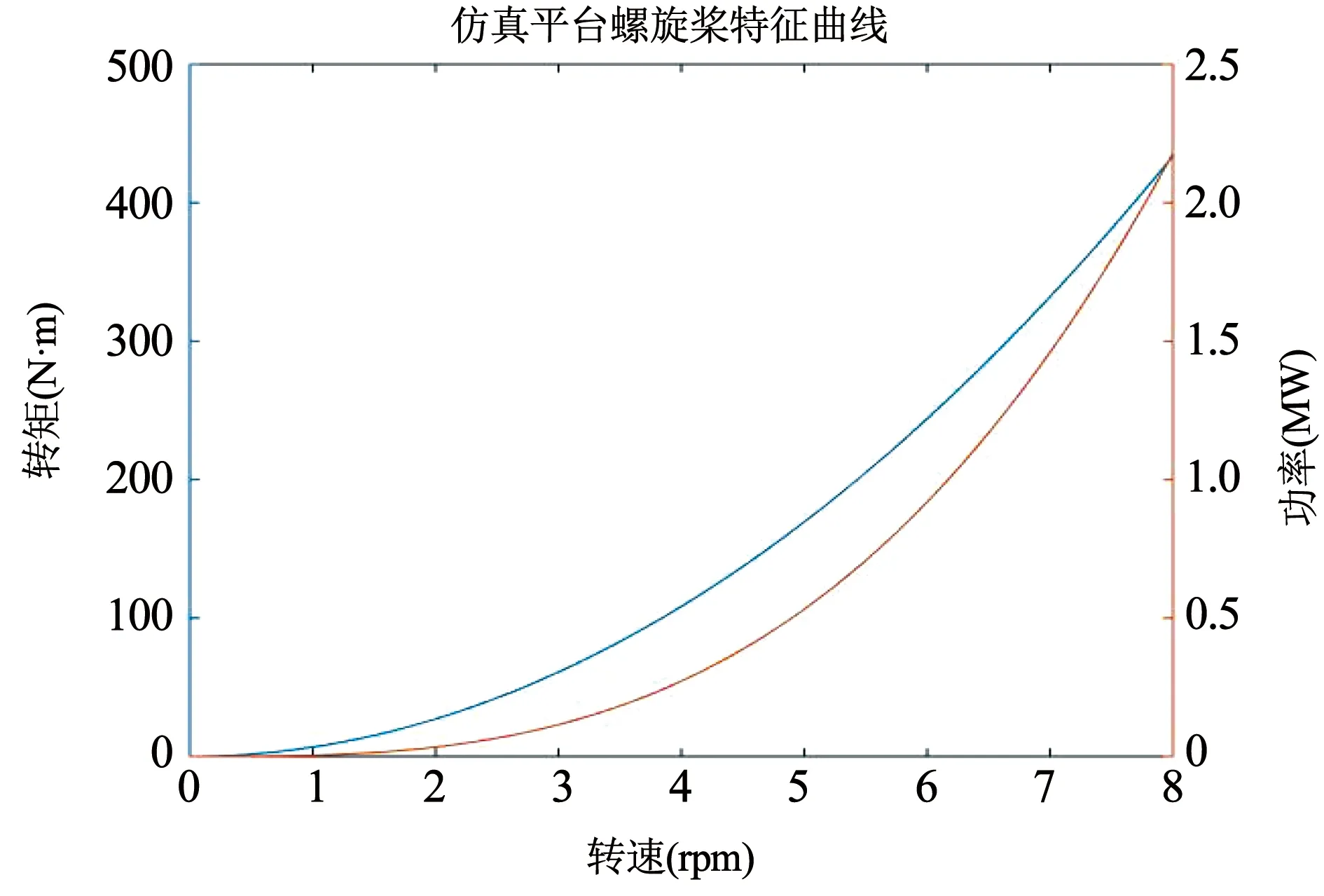
圖7 MATLAB仿真螺旋槳特性曲線Fig.7 Curve of MATLAB simulation propeller characteristic
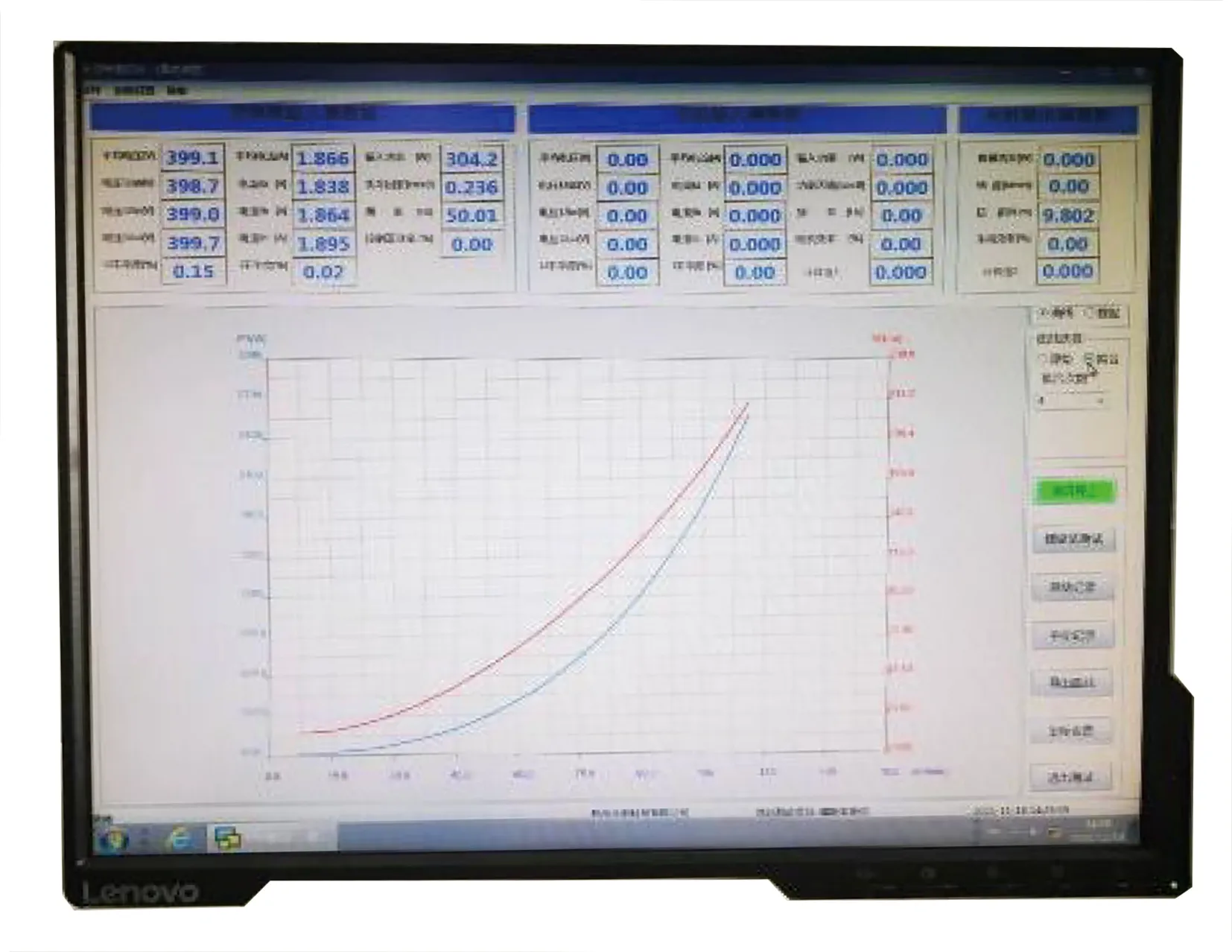
圖8 半實物仿真平臺實測螺旋槳特性曲線Fig.8 Measured propeller characteristic curve on the semi-physical simulation platform
在運行過程中,負載電機的轉速是由推進電機決定的,船機槳數學模型根據推進電機的轉速、船速可推算出螺旋槳轉矩,轉矩調節器按給定轉矩調節負載變頻器的輸出頻率改變負載電機的同步轉速,實現對負載電機的轉矩控制,再現螺旋槳的特性。
4 結論
設計了一種船舶電力推進系統螺旋槳負載特性研究的半實物仿真平臺,給出了其完整的系統硬件架構體系及控制軟件構成,結合船機槳數學模型與工作母船及仿真平臺間的轉換關系給出了仿真平臺的模擬方法,進行了工作母船數據仿真、Matlab數據仿真、平臺數據實測。結果表明,系統仿真動態性能好,能夠滿足實驗室電力推進系統的試驗要求,該數字化軟件系統的網絡擴展性強,可接入多種軟件進行跨平臺實驗。
猜你喜歡
艦船科學技術(2022年14期)2022-09-22 03:07:40
工業設計(2022年8期)2022-09-09 07:43:20
艦船科學技術(2022年2期)2022-03-29 01:12:44
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
小哥白尼(趣味科學)(2019年10期)2020-01-18 09:16:22
裝備制造技術(2019年12期)2019-12-25 03:06:46
船舶標準化工程師(2019年4期)2019-07-24 07:21:12
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
家庭影院技術(2017年9期)2017-09-26 03:41:45