一種三梁結構六維力傳感器設計與研究
2023-10-14 07:50:42汪志強
機械工程師 2023年10期
汪志強
(臺州中清科技有限公司,浙江 臺州 318000)
0 引言
六維力傳感器能夠同時測量三維空間的全力信息,是機器人力控系統中最重要的傳感器之一[1],在機器人示教、輪廓跟蹤、精密裝配、打磨拋光等作業中有廣泛的應用[2-3]。彈性體作為六維力傳感器的核心元件,其結構直接影響傳感器性能[4-5],三梁式彈性體結構具有體積小、結構緊湊、成本低等優點[6],有利于六維力傳感器的產業化發展。但目前國內絕大部分的研究都集中在十字梁式彈性體和并聯式彈性體結構上,對三梁式彈性體結構的研究寥寥可數。因此對三梁式彈性體結構進行分析研究顯得尤為重要。
1 彈性體設計及其應變分析
設計的三梁式彈性體結構如圖1所示,包含外圈法蘭、中心臺、浮動梁、應變梁,其中3根應變梁互成120°夾角。S1~S12為應變片,其中S1/S3/S5貼于應變梁上表面,S2/S4/S6貼于應變梁下表面,S7/S8/S9/S10/S11/S12貼于應變梁側面。
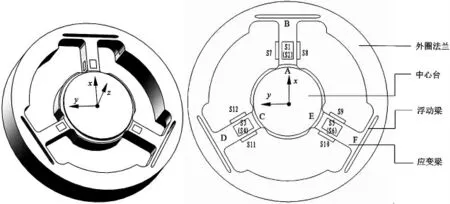
圖1 三梁式彈性體結構
當彈性體受到正向Fx作用時,應變梁CD、EF側面產生彎曲應變,位移如圖2(a)所示,其中應變片S9、S12受拉,應變片S10、S11受壓;當彈性體受到正向Fy作用時,應變梁AB、CD、EF側面產生彎曲應變,位移如圖2(b)所示,其中應變片S7、S10、S12受拉,應變片S8、S9、S11受壓;當彈性體受到正向Fz作用時,應變梁AB、CD、EF上下表面產生彎曲應變,位移如圖2(c)所示,其中應變片S1、S3、S5受拉,應變片S2、S4、S6受壓;當彈性體受到正向Mx作用時,應變梁CD、EF上下表面產生彎曲應變,位移如圖2(d)所示,其中應變片S3、S6受拉,應變片S4、S5受壓;當彈性體受到正向My作用時,應變梁AB、CD、EF上下表面產生彎曲應變,位移如圖2(e)所示,其中應變片S2、S3、S5受拉,應變片S1、S4、S6受壓;當彈性體受到正向Mz作用時,應變梁AB、CD、EF側面產生彎曲應變,位移如圖2(f)所示,其中應變片S7、S9、S11受拉,應變片S8、S10、S12受壓。對應變梁上下表面及側面在六軸載荷作用下的彎曲應變分別進行整理,如圖3(a)和圖3(b)所示。

圖2 彈性體在各軸載荷作用下的位移云圖
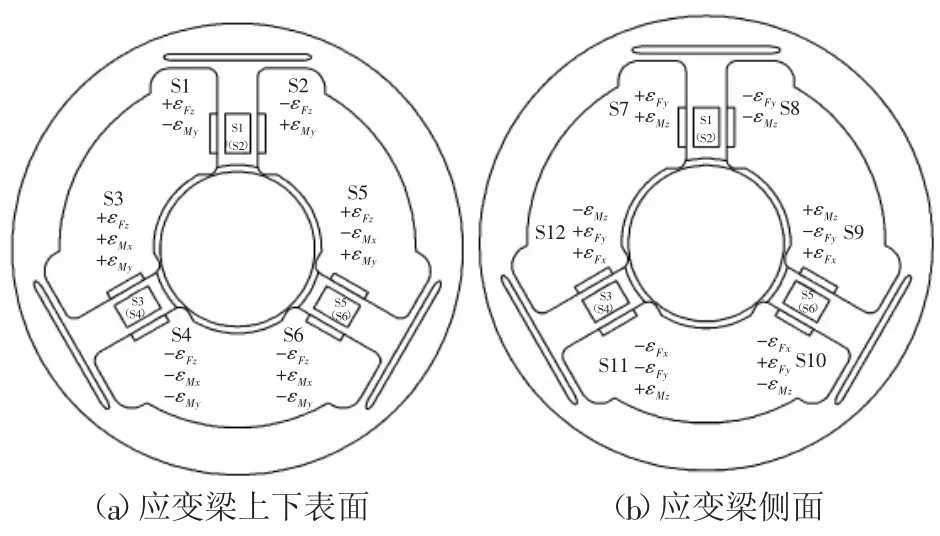
圖3 應變梁在各軸載荷作用下的應變分布
2 組橋設計及解耦計算
根據上述應變片在各載荷分量作用下的輸出特性,設計惠斯通半橋電路(如圖4),應變片位于橋路鄰邊,并與2個相同阻值的常規電阻R組成惠斯通半橋電路,橋路供電電壓為U,輸出電壓為SG。
以橋路SG1為例,當施加+Fz方向力時,應變片S1受拉阻值增大ΔR,應變片S2受壓阻值減小ΔR,則SG1的輸出為
式中:SG1為輸出電壓;R為橋路電阻;U為供電電壓;K為應變片靈敏系數;εFz1為應變片S1/S2的平均應變量。
其他載荷分量作用下的橋路輸出亦可得到類似結果,如表1所示。
根據式(1)和表1,可定義各載荷分量作用下的名義輸出電壓U:
六維力傳感器力矩陣與輸出電壓矩陣有如下關系:
式中:F為六維力傳感器力矩陣;B為初始解耦矩陣;U為名義輸出電壓矩陣;K為系數矩陣;SG為橋路輸出電壓矩陣;B′為變形后的解耦矩陣。
因此,六維力傳感器標定時,可通過額定受力矩陣F和橋路輸出電壓SG求解變形后的解耦矩陣B′,簡化標定計算步驟。
由最小二乘法可得
3 有限元仿真驗證
將設計的三梁式彈性體結構導入ANSYS仿真軟件中,尺寸參數及材料參數如表2、表3所示,應變片S1~S12位于距中心臺1 mm處。外圈法蘭底面施加固定約束,中心臺施加載荷,共計10個載荷步,載荷步詳情如表4所示。其中載荷步1~6為單軸標定載荷,用于求解解耦矩陣B′,載荷步7~10為復合載荷,用于驗證解耦矩陣B′。

表3 彈性體材料參數

表4 各載荷步載荷分量詳情
因為橋路輸出電壓SG與應變片應變εF成正比,且比例系數KU/2為定值,所以可使用εF作為SG的值進行仿真驗證。求解載荷步1~10,得到應變片S1~S12的應變量,計算匯總后得到橋路輸出電壓SG如表5所示。根據式(8)進一步計算,可得到名義輸出電壓U,如表6所示。

表5 各載荷步輸出電壓SG詳情
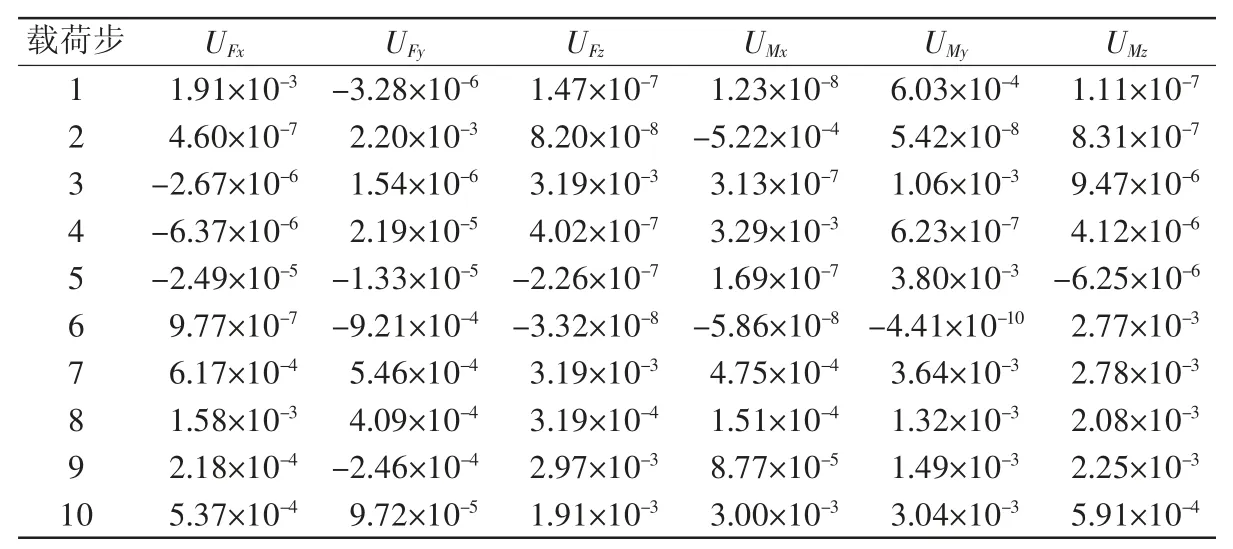
表6 各載荷步名義輸出電壓U詳情
觀察表6單軸加載時(即載荷步1~6)的名義輸出電壓,綜合如圖5所示,主對角線的值遠大于其余值,反映了名義輸出電壓與對應單軸載荷的強相關性,進一步證明了式(2)~式(7)的表征作用。
由表4、表5載荷步1~6中的載荷分量F和輸出分量SG可求得變形后的解耦矩陣B′:
為了驗證上述解耦矩陣的正確性,將表5載荷步7~10輸出分量SG′6×4及B′代入式(9),求得驗證載荷F′6×4:
對比表4載荷步7~10載荷分量與解得的F′6×4,可以發現兩者基本無誤差。從而驗證了該六維力傳感器設計方案和解耦方法完全可行。
4 結語
本文設計了一種三梁式六維力傳感器,在各軸載荷作用下,對傳感器彈性體進行了應變分析,并以此為基礎設計了組橋電路,詳述了名義輸出電壓的計算與簡化求解解耦矩陣的方法,最后通過ANSYS仿真軟件驗證了本文設計方案及所提解耦方法的可行性,為后續該結構類型六維力傳感器的優化設計奠定了基礎。