基于5G的礦用裝備遠程控制技術研究
2023-10-12 05:31:24李晨鑫
工礦自動化 2023年9期
李晨鑫
(1. 煤炭科學技術研究院有限公司,北京 100013;2. 煤礦應急避險技術裝備工程研究中心,北京 100013;3. 北京市煤礦安全工程技術研究中心,北京 100013)
0 引言
在國家發展改革委、能源局、應急部、煤監局、工信部、財政部、科技部、教育部8部委聯合印發《關于加快煤礦智能化發展的指導意見》后,煤礦智能化建設不斷推進,礦用5G系統建設不斷加速,在智能礦山建設中構建了高速信息傳輸通道,業界學者也針對礦用5G技術開展了廣泛研究[1-3]。礦用5G依托其大帶寬、低時延、高可靠的傳輸能力,將為實現智能礦山信息基礎設施融合,打造透明礦山、萬物互聯、裝備遠程控制等應用構建基礎。其中,裝備遠程控制是煤礦智能化的重要應用,是實現少人化、無人化礦井生產的關鍵手段。
礦用5G通信技術及系統方面,霍振龍[4]研究了包括5G在內的主要礦用通信技術,指出依托5G 低時延特性開展智能綜采工作面集中控制、智能掘進工作面集中控制和無人駕駛等遠程控制是礦用5G關鍵應用;李晨鑫[5]研究了礦用5G通信演進技術,指出了3GPP Release 17適用于礦井通信及應用場景的關鍵技術。智能化開采方面,王國法等[6]全面研究了煤礦無人化智能開采系統理論與技術研發進展,指出利用5G等無線通信技術,使控制系統融合有線無線網絡,能夠滿足智能控制及感知設備的無線接入需求,緩解井下空間壓力;范京道等[7]針對基于5G的煤礦智能化開采關鍵技術開展了探索研究,分析了基于5G技術的煤礦智能化開采技術優勢和應用環節;張凱隆[8]研究了智能化綜采工作面全景視頻遠控技術,詳細闡述了井下綜采工作面5G網絡部署、全景視頻實時拼接算法等關鍵技術。智能化掘進方面,顧義東[9]研究了5G 技術在煤礦掘進工作面運輸系統中的應用,提出5G可用于掘進工作面的各類感知設備接入、高清視頻監控、遠程集中控制。智能化輔運方面,孫繼平等[10]研究了礦井車輛無人駕駛關鍵技術,指出基于5G無線通信系統的礦井車輛無人駕駛地面遠程控制技術是首選方案;李晨鑫等[11]研究了煤礦井下網聯式自動駕駛技術,提出了基于5G蜂窩通信與直連通信構建井下人車巷云協同的自動駕駛系統架構。
目前,主要研究聚焦于5G技術優勢及其對采掘運設備遠程控制的匹配性和支撐度,缺少針對采掘運具體過程和參數與5G信道的映射研究,需要針對采掘運等設備遠程控制的功能需求、物理設備連接關系及通信鏈路信息流開展詳細梳理和定義。另外,礦用裝備遠程控制應用需要構建點對點傳輸通道,但當前的5G網絡基礎組網方式為廣域網架構,需要開展傳輸通道構建研究。再者,礦用5G裝備遠程控制應用中,監測監視數據具有大帶寬傳輸需求,遠程控制信息具有低時延傳輸需求,需要研究空口信道的資源分配機制,從而確保基于5G的礦用裝備遠程控制應用的可靠性和穩定性。
本文分析了礦用5G相比4G、WiFi6技術的優勢,提出了基于5G的遠程控制應用系統參考架構,以采煤機遠程控制為例,梳理了遠程監視監測數據與遠程控制數據的信息流,研究了礦用裝備遠程控制鏈路構建及空口資源靈活調度關鍵技術,為實現智能礦山5G+裝備遠程控制應用落地提供了方向。
1 礦用通信技術在裝備遠程控制應用中的適用性
礦用通信技術經歷了有線通信、漏泄通信、小靈通、2G、3G等有線通信或窄帶無線通信技術后,從4G時代開始進入寬帶無線通信的發展階段,目前主流的寬帶無線通信技術為4G、WiFi6和5G。
構建采煤、掘進、主運、輔運等設備遠程控制應用,是實現少人則安、無人則安的煤礦安全生產的關鍵手段。有線通信能夠提供低時延、高可靠和大帶寬的信息傳輸通道。然而,一方面,在采掘工作面,由于大型移動設備運動過程中光纖等有線通信介質易損壞,無法確保長期穩定布設。另一方面,車輛等輔運設備運行范圍大,無法通過有線方式進行遠程控制。因此,無線通信適合作為采煤、掘進和主運設備有線遠程控制之外的冗余通信方式,適合作為無人駕駛車輛進行車巷云協同遠程控制的必要技術手段。
4G技術最大載波帶寬為20 MHz,不支持高階調制,傳輸速率有限。礦用4G上行傳輸峰值傳輸速率一般在50 Mbit/s以下,帶寬無法滿足礦用裝備遠程監測監視的上行傳輸帶寬需求。4G空口時域幀結構單位為1 ms的子幀,1個無線幀周期為10 ms,加之核心網的傳輸設計,一般時延在100 ms以上,也難以滿足礦用裝備遠程控制的低時延需求。
WiFi6技術能夠提供大帶寬傳輸能力,但作為非授權頻段的無線通信技術,按照無線電管理規定的要求,需要與藍牙、ZigBee及其他WiFi技術共享無線信道資源,無法全時占用信道,每次接入信道前需要執行LBT(Listen Before Talk,對話前偵聽)機制,且信道占用時間達到無線電管理規定的時間門限時,必須釋放無線信道資源[12]。因此,WiFi6技術在時延和可靠性方面存在固有的瓶頸,也不適用于礦用裝備遠程控制類應用。
5G技術能夠提供大帶寬、低時延、高可靠的傳輸能力,最大帶寬為100 MHz,支持256QAM(Quadrature Amplitude Modulation,正交振幅調制)的高階調制[13-15]。為了滿足礦井上行大帶寬傳輸的需求,通過調整上下行幀結構配比,能夠支持上行500 Mbit/s以上的峰值傳輸能力,通過配置更高的子載波間隔,獲得時間更短的時域資源單元,能夠在礦用專網環境下實現最低10 ms的端到端時延。5G通過物理層混合自適應重傳等方式,能夠確保傳輸的高可靠性,成為礦用裝備遠程控制適用的無線通信技術。
2 基于5G的礦用裝備遠程控制應用系統參考架構
礦用裝備遠程控制主要面向采煤、掘進、主運、輔運等生產相關的環節和場景。按照信息物理系統架構研究方法[16-17],構建基于5G的礦用裝備遠程控制應用系統的功能視圖、物理視圖和通信視圖,如圖1所示。

圖1 基于5G的礦用裝備遠程控制應用系統參考架構研究方法Fig. 1 Research method of reference architecture of 5G based mine equipment remote control application system
功能視圖:面向系統無線遠程控制的技術要求,以采煤、掘進、主運、輔運等生產過程作為依據,設計礦用裝備遠程控制的功能架構,定義需要進行遠程控制的功能對象,梳理功能對象之間的數據流。物理視圖:將功能視圖的功能對象映射至采煤、掘進、主運、輔運的生產設備,通過數據流映射,結合生產設備連接關系,建立生產設備監測、監測、控制的信息流,構建礦用裝備遠程控制的部署架構。通信視圖:采用礦用5G通信的終端設備、基站設備、承載設備和核心網設備,建立基于5G的礦用裝備遠程控制傳輸鏈路,用于承載信息流,將生產設備的部署架構轉換為礦用5G通信的傳輸鏈路,從而形成基于5G的礦用裝備遠程控制應用系統參考架構,如圖2所示。

圖2 基于5G的礦用裝備遠程控制應用系統參考架構Fig. 2 Reference architecture of 5G based mine equipment remote control application system
5G+采煤設備遠程控制應用中,需要對采煤機和電液控設備進行遠程的設備參數監測、環境工況監視和裝備遠程控制。設備參數包括采煤機的搖臂高度、實時位置、行進速度等,支架的高度信息、行程信息、頂梁傾角、底座傾角等。監測監視數據通過匯聚接入礦用5G本安型網關CPE(Customer Premise Equipment,客戶前置設備),經5G網絡傳輸至集控中心。集控中心根據5G傳輸的實時設備參數監測和環境工況監視信息,下發控制指令,同時對刮板輸送機、破碎機和轉載機進行遠程監測監視。
5G+掘進設備遠程控制應用中,需要監測掘錨一體機、錨桿轉載機、自移機尾的設備參數、運行速度、設備位置等信息,進行環境工況監視。監測監視數據通過匯聚接入礦用5G CPE,經5G網絡傳輸至集控中心。集控中心根據5G傳輸的實時設備參數監測和環境工況監視信息,下發控制指令,對頂板支護的錨桿(索)壓力、頂板壓力、礦壓、位移、測距信息等進行監測,同時對物料運輸車、帶式輸送機的設備參數和運行狀態進行監測。
5G+主運設備遠程控制應用中,帶式輸送機的運行參數通過PLC接入5G CPE,經5G網絡傳輸至主運控制中心,采用5G攝像儀和智能視頻分析平臺進行故障分析、違章告警和煤流監測,控制中心根據監測監視情況下發控制指令,調控帶式輸送機運行狀態。
5G+無人駕駛遠程控制應用中,通過5G車載終端將車輛周邊的環境視頻、激光雷達、毫米波雷達、UWB定位、規劃路徑和車輛參數等信息上傳至遠程控制平臺,根據實時監測監視情況,進行無人駕駛車輛的遠程控制和接管。
采用統一的礦用5G網絡架構承載采、掘、主運、輔運裝備遠程控制應用傳輸業務,通過不同模態的礦用5G終端實現數據接入和收發。采煤、掘進設備主要通過CPE匯聚接入監測監視數據并接收控制指令,頂板支護監測通過5G監測分站和無線傳感器進行數據上傳,主運設備通過PLC接入5G CPE,上傳帶式輸送機數據并接收控制指令,通過5G攝像儀上傳視頻并分析故障、違章和煤流信息,無人駕駛車輛則通過礦用5G車載終端進行監視、規劃和控制信息收發。
3 基于5G的礦用裝備遠程控制關鍵技術
根據基于5G的礦用裝備遠程控制應用系統參考架構,以5G+采煤機遠程控制為例,通過梳理監視鏈路與控制鏈路傳輸的具體路徑和信息流,分析并研究5G傳輸鏈路的關鍵技術。
3.1 基于5G的礦用裝備遠程控制信息流
基于5G的采煤機遠程控制信息流如圖3所示,采煤機向集控中心傳輸設備監測和工況監視信息,集控中心向采煤機傳輸動作控制信號。

圖3 基于5G的采煤機遠程控制信息流Fig. 3 Information flow of 5G based shearer remote control
采煤機對設備參數和環境工況數據進行匯聚,經協議轉換,通過有線-無線冗余模塊,將無線傳輸數據輸入礦用5G CPE中,經5G基站、5G基站匯集器、5G基站控制器,由5G承載網傳輸至5G專網核心網,之后按照集控中心節點尋址信息,經5G網絡下發至集控中心的CPE,最終到達集控中心。集控中心形成集控信號后,經過與前述監測監視數據傳輸反向的鏈路,將控制數據發送至采煤機的控制器,實現遠程控制。
根據基于5G的采煤機遠程控制信息流的雙向走向,目前5G支持采煤機遠程控制需要解決2個關鍵技術問題:
1) 傳統工業網絡以有線傳輸為主(包括采煤機控制網絡),大量使用層二傳輸協議。當前常規5G網絡則依靠IP尋址的層三傳輸協議進行通信,需要額外構建層二協議路由,方可支持采煤機遠程控制過程中集控中心控制器和受控采煤機的穩定數據傳輸。
2) 設備監測和工況監視信息的傳輸涉及多路監測參數和視頻數據,一般采煤機兩側分別部署CPE,每側CPE匯聚輸入不少于10路1 080P視頻。左傳感網絡控制器輸入CPE的參數包括左搖臂采高傳感器參數、行走位置傳感器參數、左搖臂溫度傳感器參數、左牽引箱溫度傳感器參數、電纜張力傳感器參數、水路壓力傳感器參數、水路流量傳感器參數。右傳感網絡控制器輸入CPE的參數包括右搖臂采高傳感器參數、右搖臂溫度傳感器參數、右牽引箱溫度傳感器參數、泵箱溫度傳感器參數、泵箱油位傳感器參數、背壓壓力傳感器參數、防撞傳感器參數。
設備監測和工況監視信息的傳輸為典型的大帶寬業務,因此,接入數據的單CPE應至少具備200 Mbit/s的上行峰值傳輸速率。集控中心向采煤機傳輸動作控制信號,通過統計采煤機控制設備傳輸業務包的規律,業務模型為均值在300 byte左右、頻率為50 Hz的頻發小包,總傳輸速率在2 Mbit/s左右,但對于端到端時延要求較高,一般需要達到40 ms以內。因此,基于5G的采煤機遠程控制,需要5G空口信道同時傳輸監測監視的大帶寬數據和遠程控制的頻發低時延數據。本文針對礦用5G的層二傳輸鏈路構建和空口差異化資源調度開展研究。
3.2 基于5G的礦用裝備遠程控制傳輸鏈路構建
構建采煤機遠程控制應用的礦用5G層二傳輸鏈路,主要可采用2種技術手段。
1) 不改變當前5G常規的層三傳輸架構,額外構建層二隧道。采用層二隧道協議,將采煤機側的CPE和集控中心側的CPE的LAN(Local Area Network,本地網)IP地址配置為相同網段,并設置層二隧道協議的本段設備參數和對端設備參數,將本端設備的IP地址、WAN(Wide Area Network,廣域網)的IP地址、端口ID、會話ID、隧道名稱,與對端設備的IP地址、WAN的IP地址、端口ID、會話ID、隧道名稱,全部配置一致,建立層二隧道,提供點對點傳輸鏈路,確保交互穩定準確。
2) 采用5G LAN的網絡架構。3GPP Release 16啟動了5G LAN研究[18-19],目標是使5G網絡能夠支持工業網絡以太網通信及局域網業務,實現工業網絡與5G網絡的深度融合。5G LAN能夠支持LAN和VPN(Virtual Private Network, 虛擬專用網絡),通過支持以太網PDU(Protocol Data Unit,協議數據單元)會話協議,可直接基于層二傳輸協議進行傳輸。具體是將CPE在5G LAN的DNN(Data Network Name,數據網路名稱)和5G LAN組中簽約,通過UPF(User Plane Function,用戶面功能)單元對工業控制網絡控制器的MAC地址列表進行自學習,實現層二通信,不再需要為CPE分配網絡IP地址。使用本地交換機的5G LAN鏈路如圖4所示。

圖4 采用本地交換機的5G LAN鏈路Fig. 4 5G LAN link using local switch
采煤機側的CPE和集控中心的CPE在5G LAN的DNN和5G LAN組中簽約后,數據傳輸過程中,通過核心網的I-UPF(Initial-UPF,初始UPF)接入后,在PSA(PDU Session Anchor,PDU會話錨點)利用簽約信息,從CPE所在的5G LAN組中尋址,實現本地轉發和本地層二通信。
采用構建層二隧道的方式,能夠在當前5G網絡的核心網架構下,實現采煤機遠程控制傳輸鏈路的搭建,目前已有穩定傳輸的實際應用案例,傳輸時延等性能在現場測試部分給出。但層二隧道維護過程中,隧道數據包封裝時會在原有信令基礎上額外增加IP報頭、隧道協議報頭,傳輸過程中隧道維護參數需要在數據包中攜帶進行傳輸,需要增加大量信令開銷,將造成額外的無線信道資源占用,現場測試數據顯示,該類開銷將占用20%~25%的信道資源。
采用5G LAN方式實現設備本地轉發,則不需要額外提供無線資源進行鏈路維護。3GPP Release 16制定5G LAN技術規范的主要目的之一就是按照用戶需求實現特定終端組的層三或層二服務能力,符合基于5G的礦用裝備遠程控制層二通信的需求,在國內面向工業領域的5G LAN通信標準研究制定完成并具備推廣條件后,可通過升級核心網版本實現5G LAN在礦用裝備遠程控制中的應用。
3.3 基于5G的礦用裝備遠程控制空口資源調度
針對遠程監測監視的大帶寬傳輸和遠程控制信息的頻發性低時延傳輸需求,需要研究構建差異化的礦用5G空口信道無線資源調度機制。
5G常規的資源調度機制是終端請求方式[20-21]。當終端傳輸業務包到達時,終端向基站發出調度請求或緩沖區狀態報告,將終端傳輸的資源需求告知基站。基站根據資源占用情況和傳輸業務參數,通過特定的下行控制信令為終端分配上行傳輸資源。除終端請求方式外,5G還支持資源預調度方式,即提前將無線資源的時頻位置通過終端標志與資源位置進行映射,為終端分配對應資源。當業務包到達時,終端使用分配給自己的資源進行傳輸,能夠實現較低時延的傳輸。
上述2種資源分配機制中,終端請求方式能夠按需分配上行傳輸資源,但對于頻發的數據量較小的控制信息業務包而言,每次業務包到達后進行資源請求會造成不必要的時延開銷。資源預調度方式能夠以較低時延傳輸,但當終端需要傳輸較大的業務包時,可能需要進行業務包分段,通過多次預調度完成數據包傳輸,在接收端再進行業務包合并,才能完成全部信息的接收。因此,對于較大業務包的傳輸,采用預調度方式可能導致更大的傳輸時延。
針對基于5G的礦用裝備遠程控制傳輸需求,構建了基于傳輸業務適配的空口信道靈活資源調度機制,如圖5所示。

圖5 基于5G的礦用裝備遠程控制空口資源調度機制Fig. 5 Over the air bandwidth scheduling mechanism of 5G based mine equipment remote control
基站需要為傳輸礦用裝備遠程控制應用業務的5G終端設備配置預調度資源,為了確保能夠滿足遠程控制的低時延要求,預調度資源重復周期應配置為不大于端到端時延要求的1/2,確保在滿足時延要求的時間范圍內將控制信息發出。
當業務包在終端設備中生成后,需要根據業務類型判斷是否為控制信息。如果傳輸業務為控制信息,直接使用預調度資源進行業務包傳輸,確保低時延性能;如果傳輸業務為非控制類的監測監視信息,則終端向基站請求資源,并使用基站分配的資源將業務包發送至基站,確保業務包能夠在最少的傳輸次數內被發出,從而在保障大帶寬傳輸需求的同時,實現盡可能低的傳輸時延。
通過業務與資源調度方法的映射、終端與預調度資源的映射,滿足礦用5G傳輸大帶寬監測監視信息和低時延控制信息的差異化需求。
4 現場測試
在煤礦現場建設礦用5G無線通信系統,在綜采工作面進行5G信號覆蓋,共計118臺支架,支架間隔1.5 m,在6號支架、56號支架、113號支架處分別布設1部礦用5G基站,集控中心布設1臺礦用5G基站,在采煤機機身和集控中心使用礦用5G網關接入數據,在集控中心與采煤機之間建立用于遠程控制的層二隧道,采用資源預調度和資源請求調度條件性適配的資源調度機制。
為了驗證基于5G的采煤機遠程控制技術性能,在集控中心及采煤機兩側分別采用礦用本安型手機安裝Sword Max無線測試軟件,在數據接口做冗余接入,開展可靠性、端到端時延及無線參數測試。
可靠性方面,測試過程中通過層二隧道共傳輸數據包13 328個,通過收發兩側對比,未出現丟包或接收不成功的現象。端到端傳輸時延測試數據如圖6所示。可看出端到端時延為11.5~23.8 ms,能夠滿足礦用裝備遠程控制的傳輸需求。

圖6 端到端時延測試數據Fig. 6 Test data of end-to-end latency
無線環境下的RSRP(Reference Signal Receiving Power,參考信號接收功率)測試數據如圖7所示,可看出RSRP分布在-93~-53 dB·m之間。SINR(Signal to Interference plus Noise Ratio,信號與干擾加噪聲比)測試數據如圖8所示,可看出SINR分布在10~38 dB之間,無線覆蓋情況良好。

圖7 RSRP測試數據Fig. 7 Test data of RSRP
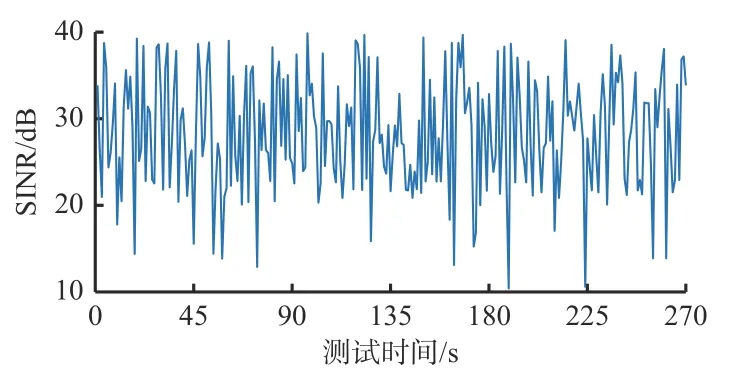
圖8 SINR測試數據Fig. 8 Test data of SINR
測試過程中采煤機控制執行穩定,測試結果表明,礦用5G無線通信系統的可靠性、端到端時延及無線覆蓋情況能夠滿足采煤機遠程控制的傳輸需求。
5 結論
1) 分析了礦用通信技術在裝備遠程控制應用中的適用性:礦用4G通信的傳輸帶寬和時延無法滿足裝備遠程控制的傳輸需求;礦用WiFi6是非授權頻段無線通信技術,無法確保裝備遠程控制數據傳輸的時延和可靠性;而礦用5G通信具備大帶寬、低時延、高可靠的傳輸能力,是實現礦用采煤、掘進、主運、輔運、無人駕駛等智能化裝備遠程控制的關鍵支撐技術。
2) 運用信息物理系統架構研究方法構建了基于5G的礦用裝備遠程控制應用系統參考架構。礦用5G通信系統可通過CPE、5G監測分站和無線傳感器、5G攝像儀、5G車載終端對接采煤、掘進、主運、輔運和無人駕駛車輛等裝備的數據接口,傳輸設備監測參數、工況環境信息和遠程控制指令。
3) 以5G+采煤機遠程控制為例,研究了5G傳輸鏈路的關鍵技術,提出了遠程控制層二傳輸鏈路構建方法和空口資源靈活調度機制。在當前礦用5G網絡架構下構建層二隧道,或升級核心網以支持5G LAN,實現點對點的層二通信,可支持礦用裝備遠程控制設備和受控設備的穩定可靠通信。礦用5G空口信道需要支持靈活的資源調度機制,采用預調度方式傳輸具有低時延需求的礦用裝備遠程控制信息,采用資源請求調度方式傳輸具有大帶寬需求的遠程監測監視數據,可支撐礦用裝備遠程控制不同信息流鏈路的差異化傳輸需求。
4) 現場測試結果表明:通過層二隧道共傳輸數據包13 328個,未出現丟包或接收不成功的現象;端到端時延為11.5~23.8 ms,能夠滿足礦用裝備遠程控制的傳輸需求;RSRP分布在-93~-53 dB·m之間,SINR分布在10~38 dB之間,無線覆蓋情況良好。礦用5G無線通信系統的可靠性、端到端時延及無線覆蓋情況能夠滿足采煤機遠程控制的傳輸需求。
猜你喜歡
中國特種設備安全(2022年6期)2022-09-20 02:52:28
防爆電機(2022年1期)2022-02-16 01:14:06
河北畫報(2021年2期)2021-05-25 02:07:50
經濟技術協作信息(2018年22期)2019-01-19 03:00:18
電子制作(2018年11期)2018-08-04 03:26:08
山西大同大學學報(自然科學版)(2016年2期)2016-12-12 03:19:28
工業設計(2016年12期)2016-04-16 02:52:00
設備管理與維修(2015年12期)2015-04-09 06:57:00
消費者報道(2014年7期)2014-07-31 11:23:57
河南科技(2014年18期)2014-02-27 14:14:58
