高壓電線巡檢機器人結構設計與試制
2023-10-11 12:50:12羅金武陳廷兵張琳豐陳思宇趙威蕤
成都工業學院學報 2023年5期
羅金武,徐 瑞,陳廷兵,張琳豐,陳思宇,趙威蕤
(成都工業學院 智能制造學院,成都 611730)
高壓輸電線路因其常年裸露在空氣中,會導致高壓電線出現雷擊破壞、表皮氧化、雜物纏繞等影響供電的問題[1-3]。為保障高壓輸電線路安全平穩地運作,必須對高壓電線實施定期巡檢工作[4]。目前,電線巡檢的主要方式多為人工巡檢,要求施工人員在高空中利用基礎設備依靠人力來完成對電線的巡檢和維護。人工巡檢不但費時費力,而且還具有較高的危險系數,如遇大風、地震、暴雪等極端氣候,人工巡檢的難度將會直線上升,這對施工人員的身體機能和工作素養均提出了極高的要求。因此,設計可主導完成高壓電線巡檢的自動化或半自動化智能裝置至關重要。
隨著移動機器人技術的發展,諸多學者相繼研發了不同結構的高壓電線巡檢機器人,較為典型的有Sawada等[5]設計的光纖復合架空地線巡檢移動機器人,Peungsungwal等[6]設計的自供電巡線機器人,Pouliot等[7]開發的懸臂機器人“LineScout”以及Debenest等[8]研制的雙線行進機器人“Expliner”等。近年來,我國也開展了對高壓電線巡檢機器人的探索。Wang等[9]率先研制了一款異位雙臂懸掛式的超高壓500 kV巡線機器人。宋樹偉等[10]采用雙手臂輪臂復合結構設計了一款巡檢機器人;王相等[11]基于動物仿生學原理提出了一種兩吊臂擺動式巡線機器人。馮晨光[12]提出一種雙臂可對稱式開合的巡檢機器人。以上研究均為高壓電線巡檢機器人的開發和應用提供了較高的參考價值。但目前學界提出的各類巡檢機器人大多處于試驗階段且有著各自的使用限制。當前,面對巡檢機器人市場的強烈需求,仍需加強對相關機器人設計與開發的探索。為此,本文在前人的研究基礎上,采用仿生原理提出了一種蛇形仿生電線巡檢機器人,通過三維建模與運動仿真技術完成了對機器人的結構設計與運動分析,并為機器人配備了相應的電控系統以實現機器人的全自動運行和遠程操控,經過樣機試制和控制調試使得機器人具備了分段避障(繞樁)和自主換線功能。
1 巡檢機器人總體設計方案
1.1 機器人結構功能分析
綜合考慮高壓電線的線路環境、巡檢成本以及機器人的電源配置,設計的巡檢機器人總體采用掛線式方案,即機器人本體附著于線纜上開展巡檢工作。
機器人在巡檢時,將不可避免地與線路支撐鐵塔、壓接管、防震錘等基礎電力設施發生交匯。在此運行環境下,為保證“一次上線”便完成巡檢工作的需求,設計的機器人除了必要的視覺巡檢功能外,還應具備基礎的行走、避障(繞樁)和自主換線功能。其中行走、避障和自主換線功能需在結構設計上進行實現。
1.2 設計方案與工作原理
設計的巡檢機器人由蛇形模塊化機械系統和控制系統共同組成,如圖1所示。
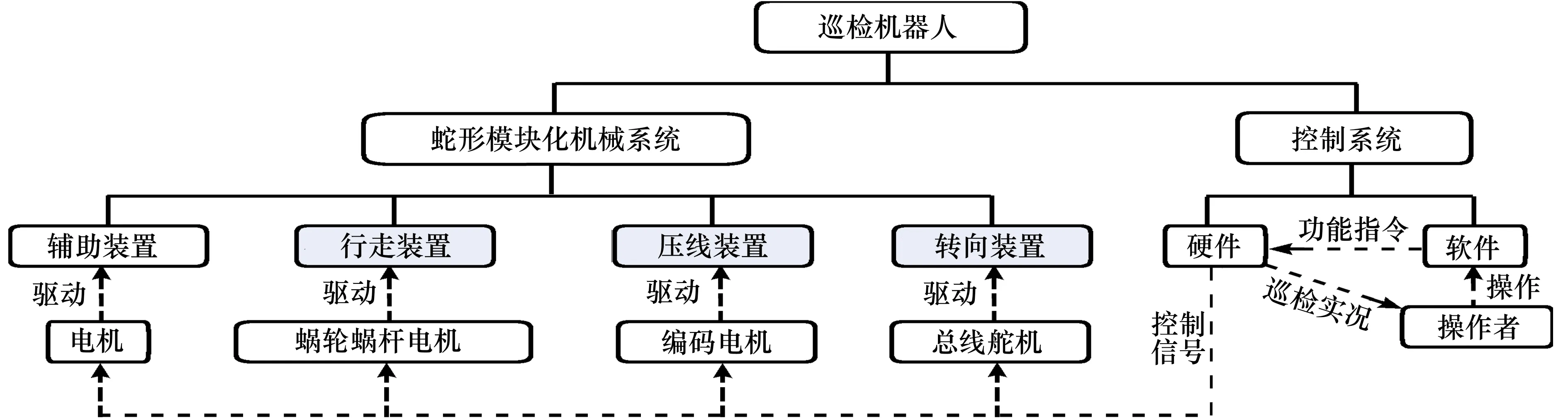
圖1 巡檢機器人的系統組成方案
巡檢機器人的機械系統主要由行走裝置、轉向裝置和壓線裝置構建的蛇形臂模塊組合而成,如圖2所示。該機器人利用了多關節蛇形臂架構和“頭部決策,尾部跟隨”的仿生操控方法,由4個及以上帶有壓線裝置、行走裝置、轉向裝置(2個旋轉自由度)的機械蛇形臂模塊組成,該蛇形臂模塊可稱為單元,如圖2(b)所示,轉向裝置安裝在2個行走裝置之間。整個機器人如同1只蛇形機構,機器人各單元之間相互連接,每個單元均有2個旋轉自由度來協同配合,進而完成巡檢機器人的姿態變換。

(a)結構示意圖
正常情況下,只需控制行走裝置便能實現機器人的直線巡檢功能。在巡檢時若遇見防震錘、氣壓接管等障礙物,可通過控制各單元之間的轉向裝置與壓線裝置使得行走裝置脫離(或回歸)巡檢電線,在各單元脫離或回歸的相互配合下,實現越障,如圖3所示。同理,若機器人巡檢時需要更換到相鄰的電線上,亦可在各單元的相互配合下實現換線。

(a)越障前
2 主體部件設計與選型分析
2.1 行走裝置
如圖4所示,行走裝置主要由電機、齒輪機構、下滾輪等部件組成。行走裝置空間占用率小,轉矩大,能穩定地帶動機器人前進。整個裝置由電機驅動,經過齒輪機構將驅動扭矩傳遞至帶有下滾輪的輸出齒輪上,促使下滾輪與電線下表面接觸產生滾動摩擦力,在滾動摩擦力的作用下實現機器人的行走。
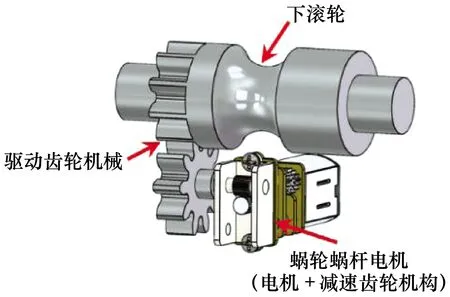
圖4 行走裝置結構模型
行走裝置的齒輪機構包含減速齒輪機構、驅動齒輪機構。考慮到使用要求,用于減速的齒輪機構不適宜過大,故選用減速比和轉矩比較大的蝸輪蝸桿電機(包含電機、減速齒輪機構)。
蝸輪蝸桿電機的選型原則:在電機尺寸盡量小的前提下,輸出的驅動力矩大于理論驅動力矩,同時保證轉速不能太低。其中,單個蝸輪蝸桿電機的理論驅動力矩:
T1=μMgR。
(1)
式中:M為每個單元的質量,kg;μ為滾輪與電纜鋼包線的接觸摩擦系數;g為重力加速度,m2/s;R為滾輪半徑,m。
驅動滾輪行走的驅動齒輪機構是傳動比為1∶1的直齒輪傳動機構,可保證傳動的穩定性,節省機器人空間,使機構更為緊湊,工作可靠,壽命長。下滾輪與輸出齒輪固連在同軸上,既簡化結構布局又能保障輸出驅動扭矩的有效傳遞。
2.2 壓線裝置
如圖5所示,壓線裝置主要包含上滾輪、升降桿、滑臺、螺紋編碼電機等部件。螺紋編碼電機上的螺紋桿、升降桿(帶螺紋孔)與導向棒三者之間構成絲桿滑塊機構。螺紋牙型為具有自鎖性的三角形,可確保滾輪與電線之間有充足的壓實力(正向接觸力)和滾動摩擦力。在編碼電機的驅動下,絲桿滑塊機構可引導升降桿相對于滑臺進行上下伸縮,進而帶動上滾輪遠離、靠近電線上表面。被巡檢的電線位于上滾輪與下滾輪之間,當上滾輪靠近電線上表面時,2個滾輪的軸距不斷縮小直至上滾輪、下滾輪壓緊電線,實現壓線功能。

圖5 壓線裝置結構模型
編碼電機的選型原則:在電機尺寸盡量小的前提下,輸出的驅動力矩大于理論驅動力矩,同時保證轉速不能太低,并具有自鎖性。其中,單個編碼電機的理論驅動力矩:
(2)
式中:m為電機需要推送的升降桿、上滾輪的總質量,kg;p為編碼電機的螺桿導程,m;η為滑動螺桿效率(約32%);fv為當量摩擦系數,其計算公式為:
(3)
式中:f為螺桿與升降桿螺紋孔之間的摩擦系數;β為螺紋牙型的牙側角,rad。
為保障螺紋具有自鎖性,螺桿與升降桿螺紋孔的螺紋升角Ψ必須滿足如下條件(自鎖條件):
(4)
式中,φv為當量摩擦角,rad。
2.3 轉向裝置
如圖6所示,轉向裝置主要包含舵機、連接件和板等部件。機器人由多個單元串聯組成,需要舵機之間相互配合完成動作。
工程上常用的舵機有數字舵機與總線舵機,各自的特性如表1所示。為保證控制系統核心(主控芯片)與舵機之間接線方便且信號傳遞穩定,采用了總線舵機。每個轉向裝置包含2個相互垂直放置的總線舵機,用于構成蛇形臂單元的2個旋轉自由度,以實現不同角度的轉向。
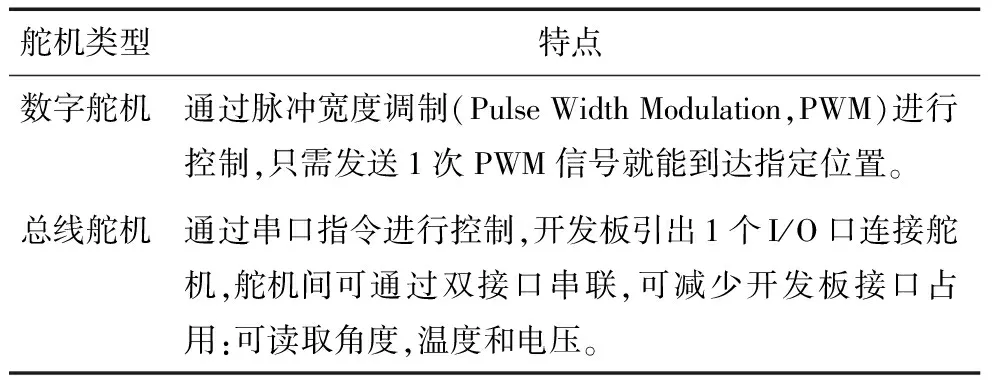
表1 2類舵機的特性比較
巡檢機器人各單元的轉向均由總線舵機來實現,在所有總線舵機的相互配合下完成機器人的姿勢變換。
2.4 巡檢功能部件
巡檢機器人頭部和尾部均可模塊化地連接具有相關功能的巡檢裝置,如機械爪、剪刀、除冰器、繞線器等,用以實現清障、除冰、線纜外皮修復等功能。例如,若在機器人頭部連接1個帶攝像頭的機械爪(見圖7(a)),尾部連接1個帶攝像頭的陶瓷剪刀(見圖7(b)),當線路上出現障礙物(飄帶、風箏、樹枝等異物)時,在人工的遠程控制下,巡檢機器人的頭部機械爪或尾部陶瓷剪刀可做出響應,完成對障礙物的處理,實現清障功能。
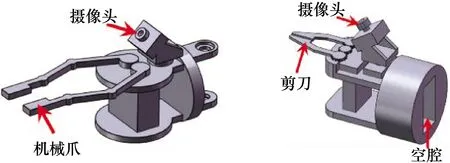
(a)帶攝像頭的機械爪 (b)帶攝像頭的剪刀圖7 具有清障功能的巡檢部件
3 運動仿真與避障分析
3.1 運動仿真
為了更好表達機器人的運動方式并檢查機器人運動過程中的合理性,使用SolidWorks軟件對巡檢機器人進行運動仿真分析。如圖8所示,利用3條空間曲線分別約束壓線裝置、行走裝置、和連接件上某特定點的運動路徑,并為升降桿添加距離配合約束,使各部件按照預定軌跡運行。另外,采用添加關鍵幀的方法對以上約束實施控制,確保約束在正確的時刻被施加或釋放,如圖9所示。
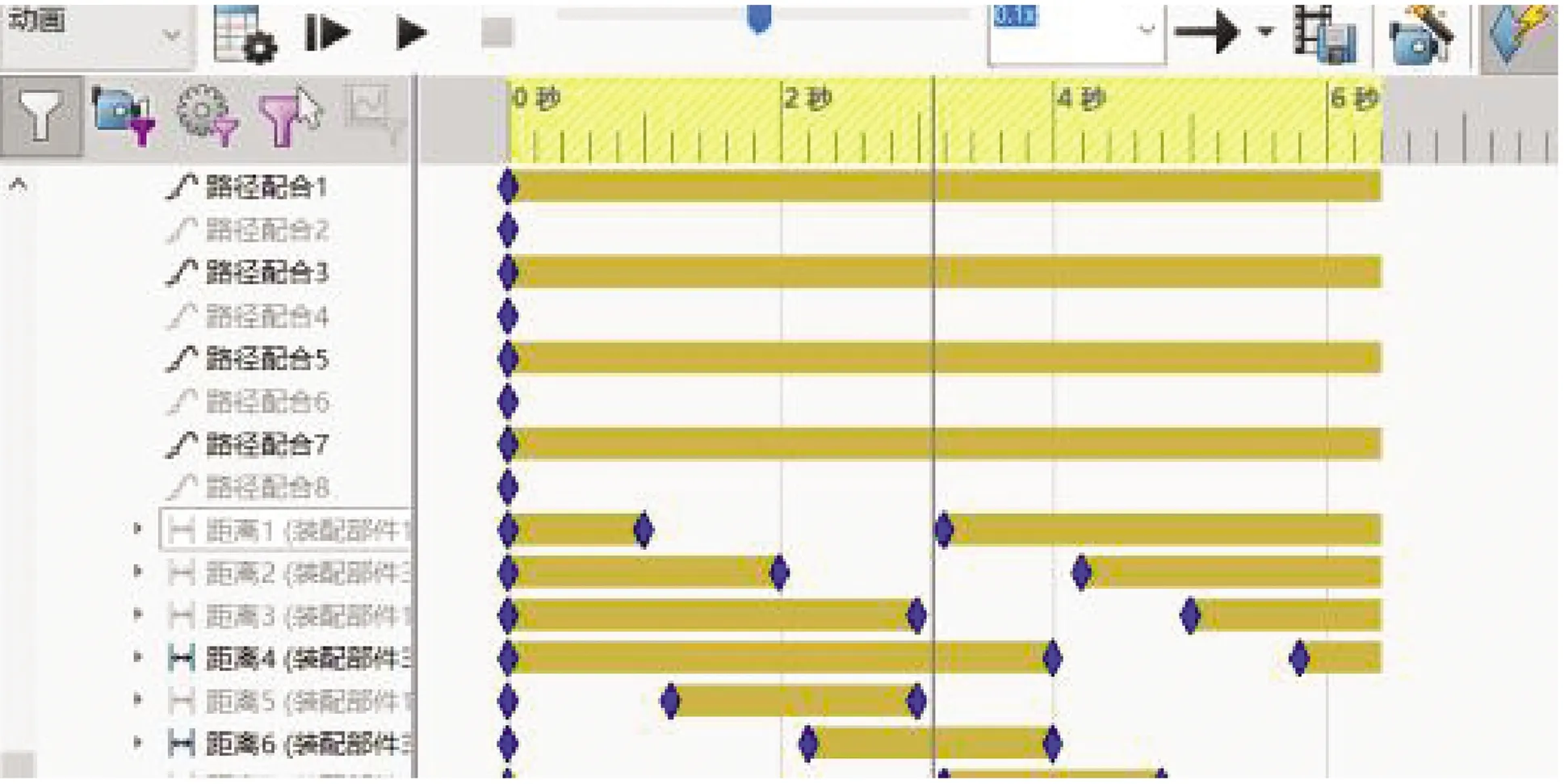
圖9 采用關鍵幀控制運動配合的約束
以越障為例,巡檢機器人的運動仿真效果如圖10所示。
3.2 避障分析
基于運動仿真結果,對巡檢機器人進行設計尺寸的調整,再通過監測升降桿的位移和總線舵機的角度變化情況后,可獲取巡檢機器人執行避障動作時的控制參數,如圖11所示。同理,結合運動仿真,還可為機器人執行其他操作時提供直接的控制參數。

圖11 避障操作流程
4 樣機試制
4.1 主要控制硬件
機器人的巡檢過程由地面操作人員以無線指令的形式控制完成:在發射端(地面端)的操作人員操控上位機發出控制指令,接收端(機器人端)接收發射端發出的數據并加以處理,最后再通過處理后的數據控制各電機的運行。為此,選用ATmega2560-16AU作為巡檢機器人的主控芯片,以A4950雙路電機驅動模塊實現電機的驅動,并搭載了ATK-LORA-01無線通信模塊。
為使巡檢機器人接收端的布線簡潔,自主設計了印制電路板(Printed Circuit Board,PCB),用于連接主控芯片、電機驅動模塊和無線通信模塊,如圖12所示。

圖12 接收端的PCB布局
4.2 樣機測試
遵照設計方案,對巡檢機器人樣機進行試制和測試。為降低試制成本和裝配精度,采用光固化3D打印技術對非標準零部件進行制作,其中承載較大處(如升降桿)選用了玻纖增強尼龍1010這類高強度材料。制作的原理樣機如圖13所示。

圖13 實物樣機
在室內環境下,對機器人功能進行測試。原理樣機上電后,使用上位機對機器人的功能進行測試,其操作界面如圖14所示。其中,STOP按鈕用于發出停止命令,避障按鈕用于發出跨越電線支撐架命令,換線按鈕用于發出雙電線換軌命令,復位按鈕用于發出主控芯片復位命令。
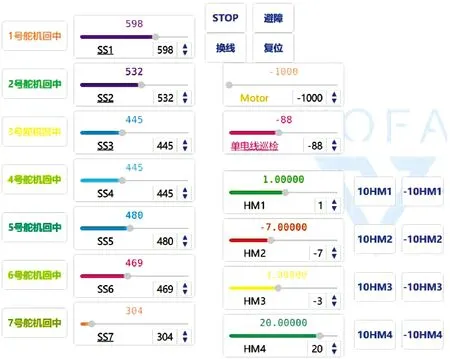
圖14 上位機操作界面
圖15展示了巡檢機器人進行單電線巡檢、跨越電線支撐架、雙電線換軌的部分測試情況。測試結果顯示,機器人單線巡檢、避障、跨線等功能與預期基本一致,表明該機器人結構及程序設計合理,主體結構的功能符合設計要求。

(a)單電線巡檢 (b)跨越電線支撐架 (c)雙電線換軌 圖15 巡檢機器人樣機測試情況
5 結語
本文采用仿生原理提出了一種蛇形仿生電線巡檢機器人并完成了結構設計與試制,得出如下結論:
1)巡檢機器人主要由行走裝置、轉向裝置,壓線裝置構建的蛇形臂模塊組合而成,可配置有巡檢功能的相關部件。
2)巡檢機器人的電機選型須滿足一定原則。機器人在各總線舵機的相互配合下可完成姿勢變換。
3)將三維模型與運動仿真技術運用在機器人的結構設計和避障分析中,為機器人執行避障等操作時提供了直接的控制參數。
4)結合控制硬件的選型和設計,試制了1臺巡檢機器人原理樣機,配合上位機指令實現了對機器人的遠程操控,功能測試結果基本符合要求。
