基于RGB信息的激光點云數(shù)據(jù)配準(zhǔn)與分割精簡算法
2023-10-10 07:36:30付志榮
長春師范大學(xué)學(xué)報 2023年8期
關(guān)鍵詞:信息
付志榮
(福建藝術(shù)職業(yè)學(xué)院,福建 福州 350100)
0 引言
隨著測繪技術(shù)的發(fā)展和空間測量精度要求的不斷提高,傳統(tǒng)測量手段在測量精度、測量的便捷性和可操作性等方面均無法滿足實際測量工作的需求。近年來,三維激光技術(shù)發(fā)展迅猛,三維激光掃描設(shè)備也持續(xù)迭代更新,激光技術(shù)的應(yīng)用領(lǐng)域和應(yīng)用場景也在不斷增多[1-2]。三維激光掃描融合了多種最新測量技術(shù),利用激光束掃描被測物體,形成了具有較高分辨率的三維激光點云集合[3]。與傳統(tǒng)測量方式相比,三維激光掃描的優(yōu)勢具體包括非接觸性、高密度性、高精度和高效率等,而且在測量過程中不易受外界光照條件的影響和干擾[4-5]。鑒于三維激光點云數(shù)據(jù)采集和測量的優(yōu)勢,其在大型工程測量、三維建筑建模、礦山高度測量、城市輪廓規(guī)劃、數(shù)字城市建設(shè)等方面都有較為廣泛的應(yīng)用。激光掃描三維物體建模與二維平面建模不同,受被掃描物體復(fù)雜程度和遮擋問題的影響,激光掃描儀的可視范圍有限,需要通過多次掃描才能獲得標(biāo)的物的全部數(shù)據(jù),即將多幅三維激光圖像進行配準(zhǔn)[6]。在多圖像配準(zhǔn)過程中還會產(chǎn)生大量數(shù)據(jù)冗余,需要對配準(zhǔn)后的圖像進行分割精簡,降低圖像的冗余度。姚星[7]提出基于中值濾波配準(zhǔn)與分割算法,使用網(wǎng)格中值替代其他區(qū)域的激光點以達到降低冗余的目的,但在該種算法下會導(dǎo)致個別像素點丟失。王月海等[8]提出基于隨機采樣的數(shù)據(jù)配準(zhǔn)與精簡算法,該算法的效率高,但精度較差。針對現(xiàn)有算法效率和精度無法兼得的問題,本文提出基于RGB信息的點云配準(zhǔn)與精簡算法,先對數(shù)據(jù)集合中的中心區(qū)域進行標(biāo)定,再處理外部輪廓信息以達到配準(zhǔn)的目的,最后集中處理冗余數(shù)據(jù)。
1 基于RGB信息的激光點云數(shù)據(jù)標(biāo)定
受測量標(biāo)的物實際狀態(tài)和工作環(huán)境的影響,激光器提取的三維激光點云集合,可能存在不均勻、噪點多等情況,會影響后續(xù)圖像處理。如果采用多傳感器進行像素補償和混合標(biāo)定,能夠取長補短并增強激光傳感器的定位和補償能力[9-10]。在被測量物的特征信息不顯著前提下進行圖像配準(zhǔn)和圖像分割,容易導(dǎo)致圖像細(xì)節(jié)信息丟失。借助RGB相機提取高分辨率的二維圖像,能夠輔助三維激光圖像雙重標(biāo)定,完成圖像的配準(zhǔn)和去數(shù)據(jù)冗余,標(biāo)定的具體流程如圖1所示。
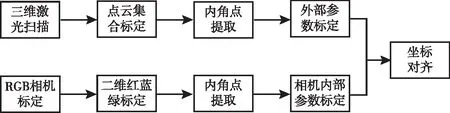
圖1 點云圖像混合標(biāo)定流程
分別采用三維激光標(biāo)定和RGB相機標(biāo)定的方式在不同視角和不同位置采集基礎(chǔ)數(shù)據(jù),從采集到的三維點云集合中提取網(wǎng)格內(nèi)角點相關(guān)信息和激光雷達的坐標(biāo);同時在RGB圖像中得到輔助參數(shù),將兩組參數(shù)對標(biāo)結(jié)合。提取內(nèi)角點數(shù)據(jù),該數(shù)據(jù)集包含彩色RGB圖像數(shù)據(jù),設(shè)標(biāo)定區(qū)域范圍為m×n,此時內(nèi)角點數(shù)量為(m-1)×(n-1),激光點云中任意一個三維坐標(biāo)點Pi表示為(xi,yi,zi),而RGB圖像對應(yīng)的二維坐標(biāo)為Pi′(ui,vi),兩種坐標(biāo)的轉(zhuǎn)換關(guān)系表示如下:
ηPi=κ[[R]·[t]]Pi′,
(1)
其中,κ是RGB相機的內(nèi)部參數(shù)矩陣,η是非零比因子,[R]和[t]分別為旋轉(zhuǎn)矩陣和平移矩陣,RGB相機的內(nèi)部參數(shù)是固定值,而三維坐標(biāo)參數(shù)是可變值,會隨著激光點云集合的平移量和旋轉(zhuǎn)量而發(fā)生變化,內(nèi)參標(biāo)定的價值在于給三維激光點云提供了準(zhǔn)確的參量,坐標(biāo)對齊后便于后續(xù)對點云集合進行配準(zhǔn)和精簡,內(nèi)外參數(shù)標(biāo)定之間的關(guān)系如圖2所示。
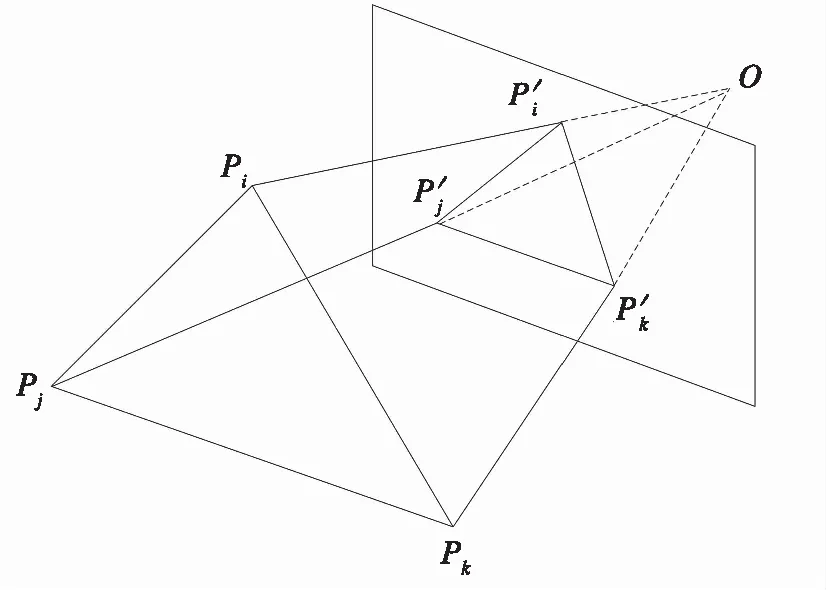
圖2 內(nèi)外參數(shù)標(biāo)定之間的幾何關(guān)系
在圖2中,點Pj、Pk與Pi共同構(gòu)成了點云標(biāo)的物的輪廓,點Pk和Pj的RGB圖像坐標(biāo)分別為(uk,vk)和(uj,vj)。通過對坐標(biāo)u值和坐標(biāo)v值的排序確定RGB圖像的坐標(biāo)和標(biāo)的物三維激光點云集合的坐標(biāo),兩組數(shù)據(jù)的變換關(guān)系如下:
(2)
再基于最小二乘法得出最終的轉(zhuǎn)換結(jié)果:
(3)
通過式(2)和(3)得出,轉(zhuǎn)換關(guān)系可以最終實現(xiàn)三維激光雷達坐標(biāo)向二維RGB坐標(biāo)的轉(zhuǎn)換。轉(zhuǎn)換為RGB二維坐標(biāo),可以提升圖像的清晰度和定位準(zhǔn)確性,也有助于對激光點云圖像的配準(zhǔn)和精簡。
2 激光點云數(shù)據(jù)的配準(zhǔn)
通過在原坐標(biāo)集和目標(biāo)坐標(biāo)集之間建立一一對應(yīng)關(guān)系的方式,求解出配準(zhǔn)圖像的坐標(biāo)關(guān)系,進而得到最終的數(shù)據(jù)匹配結(jié)果。設(shè)源點集為{Pi},目標(biāo)點集為{Qi},借助RGB信息轉(zhuǎn)換以后,源點集{Pi}的旋轉(zhuǎn)和平移將與目標(biāo)坐標(biāo)集實現(xiàn)同步。目標(biāo)點集中任一點Pi與目標(biāo)點集中任一點Qi對應(yīng)關(guān)系如下:
Qi=RPi+T+ni,
(4)
其中,ni為噪聲向量,T為配準(zhǔn)周期內(nèi)的誤差項。
受噪聲、光線折射、大氣灰塵等因素的影響,源點集和目標(biāo)點集之間還不能實現(xiàn)精確對應(yīng),點云配準(zhǔn)就是要消除圖像之間的對應(yīng)偏差,提高激光點云圖像的清晰度和解析力。
本文采用了四元素法配準(zhǔn)激光點云的圖像信息,四元素法基于最小二乘法原理實現(xiàn),在源點集和目標(biāo)點集分別取三個點P1、P2和P3,Q1、Q2和Q3,求解點集之間對應(yīng)的坐標(biāo)矩陣,此時引入第四個點P4和Q4,并在笛卡爾空間內(nèi)建立三維空間坐標(biāo)向量:
(5)
(6)
點P4和Q4同樣滿足坐標(biāo)轉(zhuǎn)換關(guān)系:
P4=RQ4+t.
(7)
則在P1~P4構(gòu)建的三維空間內(nèi)任意點Pi和Qi如下:
Pi=[P2-P1,P3-P1,P4-P1],
(8)
Qi=[Q2-Q1,Q3-Q1,Q4-Q1].
(9)
當(dāng)Qi的逆矩陣Qi-1存在時,旋轉(zhuǎn)矩陣R和平移矩陣t可以表示為
(10)
先求解激光點云集合內(nèi)4組對應(yīng)點的質(zhì)心數(shù)據(jù),即可求解激光點云集合內(nèi)的任意點坐標(biāo),利用源點集和目標(biāo)點集中匹配度最高的對應(yīng)點進行坐標(biāo)求解,以達到數(shù)據(jù)配準(zhǔn)的目的。在源點集數(shù)據(jù)的選取上,如果采集數(shù)據(jù)覆蓋了整個點集,匹配精度能夠達到最高,但該種方式的工作量巨大,只有在點云數(shù)據(jù)較少的情況下才能實現(xiàn);對于包含海量數(shù)據(jù)的點云集合,算法會因為復(fù)雜度過高而使精度下降明顯。因此在通常情況下要選擇能夠最大程度限制自由度的點作為源點集,以降低算法的復(fù)雜度,提升算法的收斂速度,確保配準(zhǔn)過程的穩(wěn)定性。
3 基于RGB信息的點云數(shù)據(jù)集合的分割與精簡
目標(biāo)標(biāo)的物的點云數(shù)據(jù)集合通常具有海量性特征,為全面獲得標(biāo)的物信息,先得到多幅激光圖像,再將圖像進行配準(zhǔn)和精簡。圖像配準(zhǔn)后絕大部分點云數(shù)據(jù)成為重復(fù)數(shù)據(jù),對三維模型構(gòu)建的作用很小,同時還增加了算法的復(fù)雜度,嚴(yán)重影響點云數(shù)據(jù)計算和處理效率。此外,海量的點云數(shù)據(jù)集合還會占用大量的存儲空間,提升數(shù)據(jù)存儲成本。因此,對配準(zhǔn)后點云數(shù)據(jù)集合進行分割和精簡,可以在確保標(biāo)的物整體結(jié)構(gòu)的前提下,保留更多重要區(qū)域和三維圖像邊緣的點云數(shù)據(jù),而在非重要區(qū)域和結(jié)構(gòu)簡單重要程度低的區(qū)域降低點云的密度,以提升算法的精度,降低算法的復(fù)雜度,并提高建模的效率。為了便于數(shù)據(jù)精簡,要先對激光點云集合進行分割,將整個點云集合分割成若干個獨立且緊密相連的子集。每個獨立的子集包含相同的屬性,對點云集合進行分割是數(shù)據(jù)精簡的前提和基礎(chǔ),從子集中提取出相關(guān)的點云特征信息。對點云集合進行分割和特征提取的步驟如下:
步驟1 在.NET框架下選擇Visual Studio作為編程工具,選擇StreamWriter 組件讀取點云數(shù)據(jù)集合。
步驟2 標(biāo)定點坐標(biāo)參數(shù)并形成獨立的分割包圍體。
步驟3 讀取點云數(shù)據(jù)并判斷被標(biāo)定的點云集合是否在包圍體之內(nèi)。
步驟4 輸出分割后的目標(biāo)點云集合,作為點云精簡的對象,同時提取包圍體內(nèi)部點云數(shù)據(jù)的特征。
利用平面擬合算法對三維激光點云數(shù)據(jù)進行精簡,先提取四個面的點云數(shù)據(jù)并形成一個包圍盒,可以選用一個分割包圍體作為一個包圍盒,也可以選擇多個包圍盒。設(shè)包圍盒點云數(shù)據(jù)集合為A,體積為V,點Pi是集合A內(nèi)的任一個點,點Pi的三個軸向記為x、y和z,其中dx、dy和dz為三個軸向最大值與最小值之間的距離。為了避免有個別數(shù)據(jù)落在邊緣,用誤差項ξ進行調(diào)整:
(11)
對集合A做格柵化處理,對含有相同像素的格柵做刪減處理,每個格柵即為一個小正方體,表示如下:
(12)
其中,η為比例因子,n為點云集合內(nèi)部個體總數(shù)量。
利用點云灰度計算公式求解點云內(nèi)部數(shù)據(jù)點的灰度均值F,灰度值滿足特定的點云格柵,便于RGB色彩特征的提取。選取接近于包圍盒邊緣1/3區(qū)域作為定位提取區(qū)域,用于判斷顏色的邊界,點Pi到邊界的距離表示如下:
(13)
其中,ri、gi和bi分別為點Pi的RGB色彩特征值,r0、g0和b0分別為包圍盒邊緣的RGB色彩特征值。
根據(jù)三維激光點云柵格中RGB色彩邊界像素點數(shù)量,確定包圍盒邊緣邊界區(qū)域,并對指示標(biāo)志區(qū)域進行再次定位,提取出點云像素點的特征值;對非指示標(biāo)志區(qū)域和輪廓邊界的點云數(shù)據(jù)進行點云精簡,可得到精簡后的點云數(shù)據(jù)。
4 實驗結(jié)果與分析
4.1 實驗準(zhǔn)備
為驗證本文提出的算法在三維點云數(shù)據(jù)配準(zhǔn)和數(shù)據(jù)精簡過程中的具體表現(xiàn),以一幢高層建筑物作為標(biāo)的物,驗證算法的配準(zhǔn)精度及對激光圖像分割、精簡的效果,標(biāo)的物的激光三維點云圖形如圖3所示。
實驗用的PC機硬件配置如下:CPU選用Intel Core i79700k,最高主頻為3.6 GHz,運行內(nèi)存為16 GB,閃存為2 TB,該建筑物的激光點云集合最大規(guī)模在100 000點左右。在8個不同視角下分別掃描建筑物,確保三維激光圖像不會出現(xiàn)錯位、反轉(zhuǎn)等情況,并獲取完整的點云數(shù)據(jù)集合。
4.2 數(shù)據(jù)配準(zhǔn)結(jié)果對比
在大場景環(huán)境下逐步提升激光點云的規(guī)模,當(dāng)三維激光點云的規(guī)模逐漸增大時,圖像配準(zhǔn)的時間消耗會不斷增大,所用時間越少表明算法的效率越高,引入中值濾波和隨機采樣方法參與對比,計算結(jié)果如表1所示。
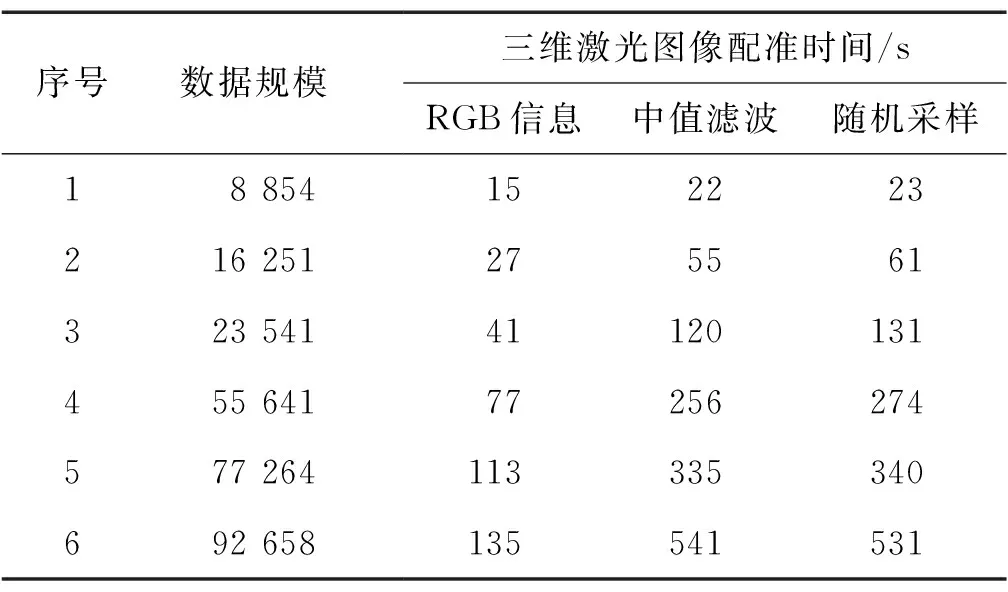
表1 不同數(shù)據(jù)規(guī)模條件下各算法的配準(zhǔn)效率對比
統(tǒng)計結(jié)果顯示,當(dāng)三維激光點云集合的規(guī)模較小時,各算法的效率趨同。隨著點云規(guī)模的提升,本文算法的優(yōu)勢逐步顯現(xiàn)出來,將原坐標(biāo)集和目標(biāo)坐標(biāo)集進行一一對比和坐標(biāo)轉(zhuǎn)換,并引入RBG信息可以有效降低點云的冗余度,提升算法的效率。再計算各算法在不同規(guī)模點云數(shù)據(jù)條件下的配準(zhǔn)精度,如表2所示。
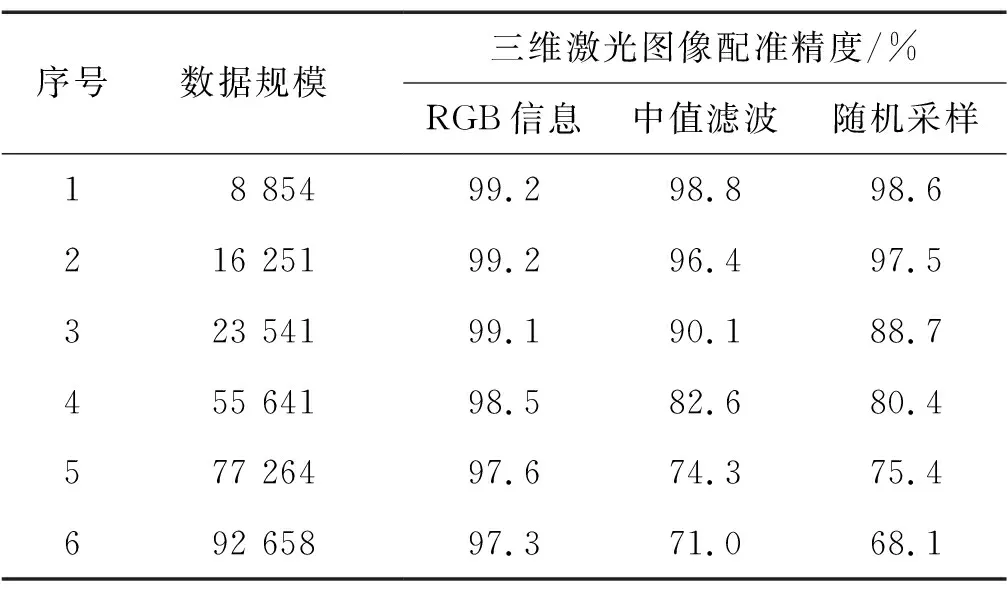
表2 不同數(shù)據(jù)規(guī)模條件下各算法的配準(zhǔn)精度對比
表2數(shù)據(jù)顯示,隨著數(shù)據(jù)規(guī)模的增加,中值濾波算法和隨機采樣算法的配準(zhǔn)精度衰減較快,趨近于最大點云規(guī)模時已經(jīng)降至70%左右,而RGB信息算法的性能未出現(xiàn)嚴(yán)重衰減。各算法在激光圖像配準(zhǔn)過程中的收斂變化情況如圖4所示。
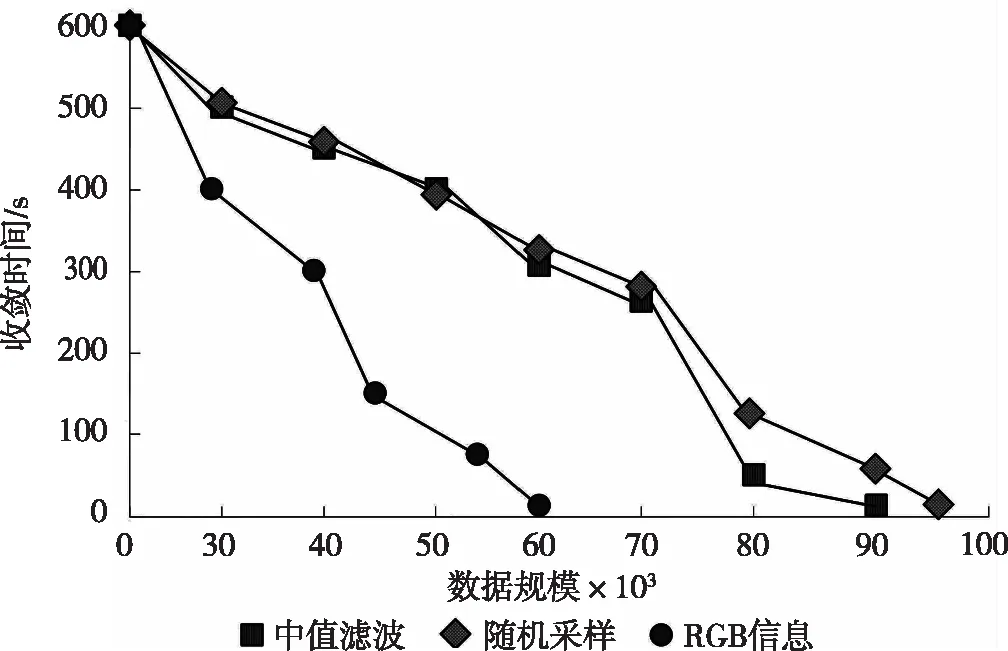
圖4 各算法的收斂變化情況
本文提出的基于RGB信息的配準(zhǔn)算法在數(shù)據(jù)規(guī)模為60 000點左右時即完成了收斂,收斂速度遠優(yōu)于兩種傳統(tǒng)激光圖像配準(zhǔn)算法。
4.3 數(shù)據(jù)分割與精簡效果對比
數(shù)據(jù)分割與精簡的目的是在確保激光圖像清晰度和細(xì)節(jié)特征的前提下,去掉冗余的激光點云并降低算法的復(fù)雜度。本文在基于RGB信息對激光點云數(shù)據(jù)進行精簡時,并不會破壞原有激光圖像的細(xì)節(jié)特征和邊緣特征,點云精簡比例適中,點云密度也適中。隨機抽取10個格柵正方體,驗證數(shù)據(jù)分割和精簡效果,如表3所示。
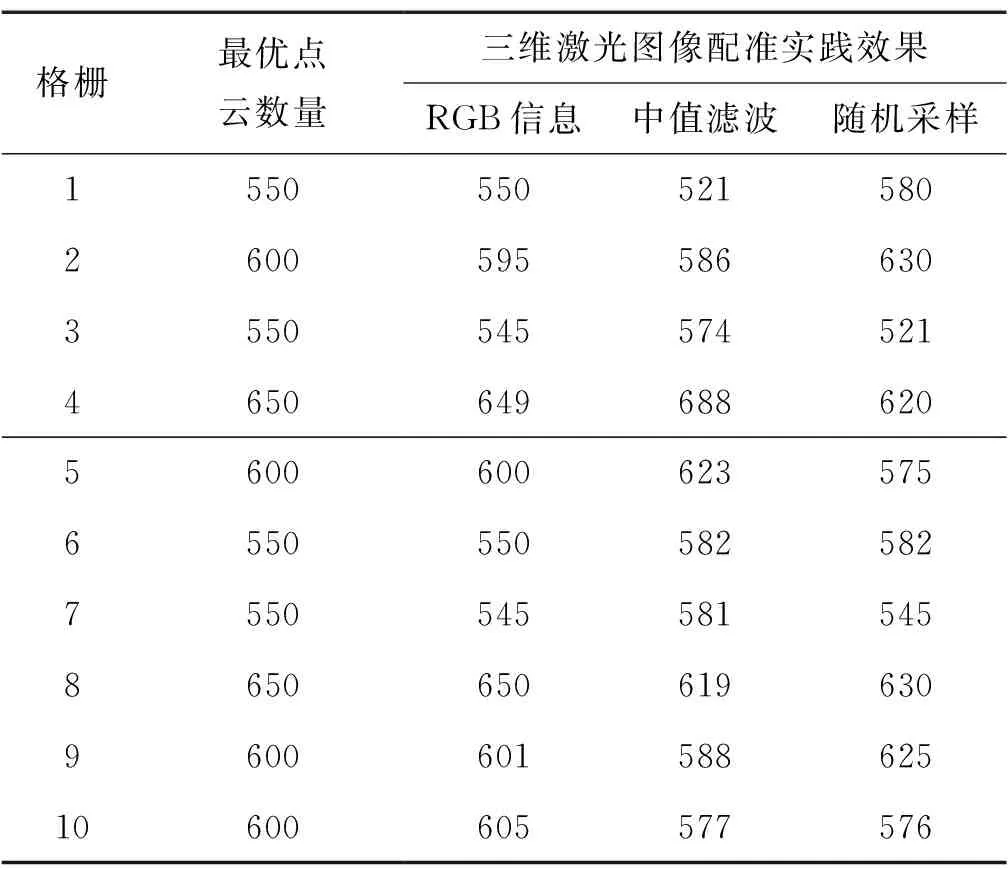
表3 數(shù)據(jù)分割和精簡效果對比
由隨機選取的格柵點云集合精簡對比結(jié)果可知,在基于RGB信息的數(shù)據(jù)分割與精簡算法控制下,格柵內(nèi)的點云數(shù)量更接近于理論值,而中值濾波算法和隨機采用算法的格柵點云數(shù)量均勻度較差,出現(xiàn)了較大偏差。這表明數(shù)據(jù)精簡過程中存在冗余點未消除以及有效點云被錯刪的情況,會影響激光點云圖像的清晰度和解析力。
5 結(jié)語
激光點云圖像具有一定的冗余特征,不僅會影響算法的復(fù)雜度,還會對圖像的清晰度產(chǎn)生不利影響。本文提出基于RGB信息的配置和分割精簡算法,重新標(biāo)定激光點云內(nèi)外參數(shù)的空間位置關(guān)系,在提升圖像配準(zhǔn)精度、工作效率的同時降低算法的復(fù)雜度。實驗結(jié)果顯示,在不同規(guī)模的點云集合條件下,基于RGB信息的圖像配準(zhǔn)算法精度更高,收斂速度更快,數(shù)據(jù)精簡后格柵內(nèi)部的點云數(shù)量接近理論值。
猜你喜歡
中華手工(2017年2期)2017-06-06 23:00:31
中外會展(2014年4期)2014-11-27 07:46:46
大眾創(chuàng)業(yè)(2009年10期)2009-10-08 04:52:00
數(shù)字社區(qū)&智能家居(2009年7期)2009-09-29 08:16:48
數(shù)字社區(qū)&智能家居(2009年11期)2009-06-25 04:30:34
數(shù)字社區(qū)&智能家居(2009年3期)2009-04-21 03:09:04
數(shù)字社區(qū)&智能家居(2009年2期)2009-03-27 04:33:44
數(shù)字社區(qū)&智能家居(2009年12期)2009-02-03 07:50:48
建筑創(chuàng)作(2001年3期)2001-08-22 18:48:14
祝您健康(1987年3期)1987-12-30 09:52:32
