基于Johnson接觸模型的內嚙合直齒輪系統多狀態嚙合動力學建模與分析
2023-10-10 07:16:28馬曉婧石建飛張天臨黨興武
振動與沖擊 2023年18期
馬曉婧, 石建飛, 張天臨, 黨興武, 張 力
(1. 蘭州理工大學 機電工程學院,蘭州 730050;2. 蘭州蘭石石油裝備工程股份有限公司,蘭州 730000)
內嚙合齒輪具有中心距小,磨損輕,傳動平穩,使用壽命長等[1]特點。由于單齒和雙齒之間周期性交替嚙合以及齒側間隙的存在,伴隨著轉速和載荷的變化,齒輪嚙合時出現齒面嚙合、輪齒脫離、齒背嚙合等多狀態嚙合行為。準確的解釋齒側間隙所引起的多態嚙合行為可為齒輪結構設計優化提供理論指導。目前,齒輪之間的嚙合力主要通過線性彈簧阻尼模型計算,該模型由質量單元、彈簧單元和阻尼單元所組成[2]。在涉及長周期且存在沖擊時,法向嚙合力的變化可為系統動態沖擊分析提供基礎。基于Hunt等[3]的早期工作,Lankarani等[4]提出改進嚙合力模型,該模型解釋了傳動過程中所發生的能量耗散。Kahraman等[5]早些時候將其用于分析結合誤差激勵的單自由度齒輪系統的動力學特性。Nevzat等[6]對齒輪非線性動力學模型進行綜述,為分析齒側間隙對齒輪嚙合過程的影響奠定了基礎。Liu等[7]基于線性彈簧阻尼系統的振蕩衰減周期,獲得了用于描述嚙合過程中能量損失的線性模型中的阻尼項。Chen等[8]將齒側間隙和齒面摩擦相結合,進行了齒輪非線性動力學特性分析。而單齒和雙齒交替嚙合特性的研究主要集中在齒輪的時變嚙合剛度。Huang等[9]考慮單齒和雙齒嚙合特性的影響,基于能量法推導了直齒輪系統時變嚙合剛度的分析模型。苑士華等[10]計算彈流潤滑狀態下的圓柱齒輪嚙合特性,分析了不同運行參數對摩擦力和嚙合力的影響。向玲等[11]綜合動態側隙、齒面摩擦、齒輪偏心及時變嚙合剛度等因素,建立了齒輪-轉子-滾動軸承系統的彎扭耦合非線性動力學模型。石建飛等[12]推導了在齒側間隙影響下的齒面嚙合、脫嚙和齒背嚙合3種動力學模型。恒定的齒隙可以清楚地描述齒輪系統的齒面嚙合、輪齒分離和齒背嚙合,但它不能有效區分齒面或齒背嚙合時的單齒和雙齒嚙合。然而,這可以通過時變齒隙來準確識別單雙齒嚙合情況[13]。Li等[14]建立了具有動態齒隙的齒輪系統在內外組合周期激勵下的非線性動力學模型。Wang等[15]基于有限元法建立了考慮齒輪幾何誤差和中心距偏差的時變齒隙模型。在以往齒輪系統中,動態嚙合力模型被表征為隱式函數。因此,在非線性動力學分析中,需要通過數值迭代來計算每個時間步長內的嚙合力。這不僅使其計算成本增高,對計算程序的性能也有考驗且因齒輪的法向嚙合力是實際工程應用中阻尼的重要來源,以往模型并沒有將傳動過程中的能量耗散計入其中。在目前有關齒輪系統的非線性動力學研究文獻中,尚未見到考慮多狀態嚙合行為對漸開線內嚙合直齒輪系統影響的報道。隨著考慮的因素越來越全面、工況越來越復雜,應根據不同嚙合狀態下齒輪齒廓、嚙合線和受力情況分段建立各個嚙合狀態下齒輪系統動力學模型。
本文在考慮齒面摩擦對齒輪系統的影響,基于Johnson接觸力模型,提出了一種計入能量耗散的改進漸開線內嚙合直齒輪傳動系統動力學動態嚙合力計算模型。在該嚙合力模型中,克服了目前現有模型的局限性,在考慮沖擊過程中的能量耗散下,將動態嚙合力定義為顯式函數。同時,基于漸開線內嚙合圓柱直齒輪傳動原理、時變齒隙以及輪齒間的受力情況,分別建立齒輪副系統在單齒齒面嚙合、雙齒齒面嚙合、單齒齒背嚙合、雙齒齒背嚙合和輪齒脫離多狀態下的動力學模型。該研究可為齒輪傳動系統的動態性能優化、參數設計和進一步研究提供了有益的參考。
1 時變參數的計算
1.1 基于Johnson接觸模型的動態嚙合力
齒輪嚙合力的確定是預測齒輪傳動系統動態性能和承載能力的關鍵。對齒輪系統進行動態特性分析時,大多數嚙合力模型是基于Hertz壓力,具有Hertz接觸理論[16]的限制性,迫使這類模型只能用于低間隙的嚙合條件。傳統模型將嚙合力表示為隱函數的數學形式,使其在實際應用中計算成本偏高。
本文中動態嚙合力計算模型基于Johnson接觸力模型[17]而改進。在齒輪嚙合時,嚙合輪齒間會產生碰撞或沖擊行為而導致能量的散耗。Lankarani等建立了計入能量耗散的嚙合力模型,提出用恢復系數ce進行修正,并證實了該系數的有效性。同時,將嚙合力定義為顯式函數,消除低間隙的使用限制且計算更簡便,由(1)式計算得到。
(1)

(2)
(3)
(4)
式中, ΔR為齒側間隙,式(4)中常數Y為對于內部接觸難以找一個單一表達式來獲得良好擬合,即Y可表示為
(5)
綜上,可以得到齒輪副嚙合力數學表達式,如式(6)所示
(6)
(7)
式中,i=k,d分別為齒輪齒面和齒背。
1.2 基于彈流潤滑理論的摩擦因數
齒面摩擦因數主要受輪齒幾何形狀、表面硬度、接觸壓力和齒面相對滑動速度等因數的影響。本文考慮彈流潤滑下的摩擦因數。根據He等[18]的研究,第i對嚙合齒輪副的時變摩擦公式表示為式(6)。

(8)
f[SRi(t),Phi(t),ηM,Raavg]=b1+b9eRaavg+
b4|SRi(t)Phi(t)lgηM|+b5e-|SRi(t)Phi(t)lg ηM|
(9)
式中,Raavg=(Ra1+Ra2)/2為平均表面粗糙度;ηM=0.058為動態黏度;bi(i= 1,2,…,9)為經驗因子,其值參見Chen等的研究。第i對嚙合齒輪的最大赫茲壓力Phi(t)表示為式(10)
(10)
式中:fe=Tp/bRbpcosα為單位法向載荷;ρri(t)為第i對嚙合齒輪的相對曲率半徑。
在式(8)、式(9)中,無量綱滾滑率SRi(t)=2vs(t)/ve(t),vs(t)為齒面滑移速度,ve(t)為卷吸速度。λi(t)為摩擦力的方向系數,可通過式(11)得到。
λi(t)=sgn[vs(t)]
(11)
式中, sgn(·)為符號函數,用于確定摩擦力的方向。
2 內嚙合齒輪系統多狀態嚙合動力學模型
在低速重載的條件下,齒輪系統處于齒面嚙合狀態。在高速輕載的條件下,齒隙會引起周期性的輪齒脫離或齒背嚙合行為。為了更好地理解齒輪傳動系統的多狀態嚙合特性,假設齒輪副為剛性支承,只考慮齒輪的扭轉振動,漸開線內嚙合圓柱直齒輪在齒面和齒背嚙合狀態下簡化的物理模型如圖1所示。
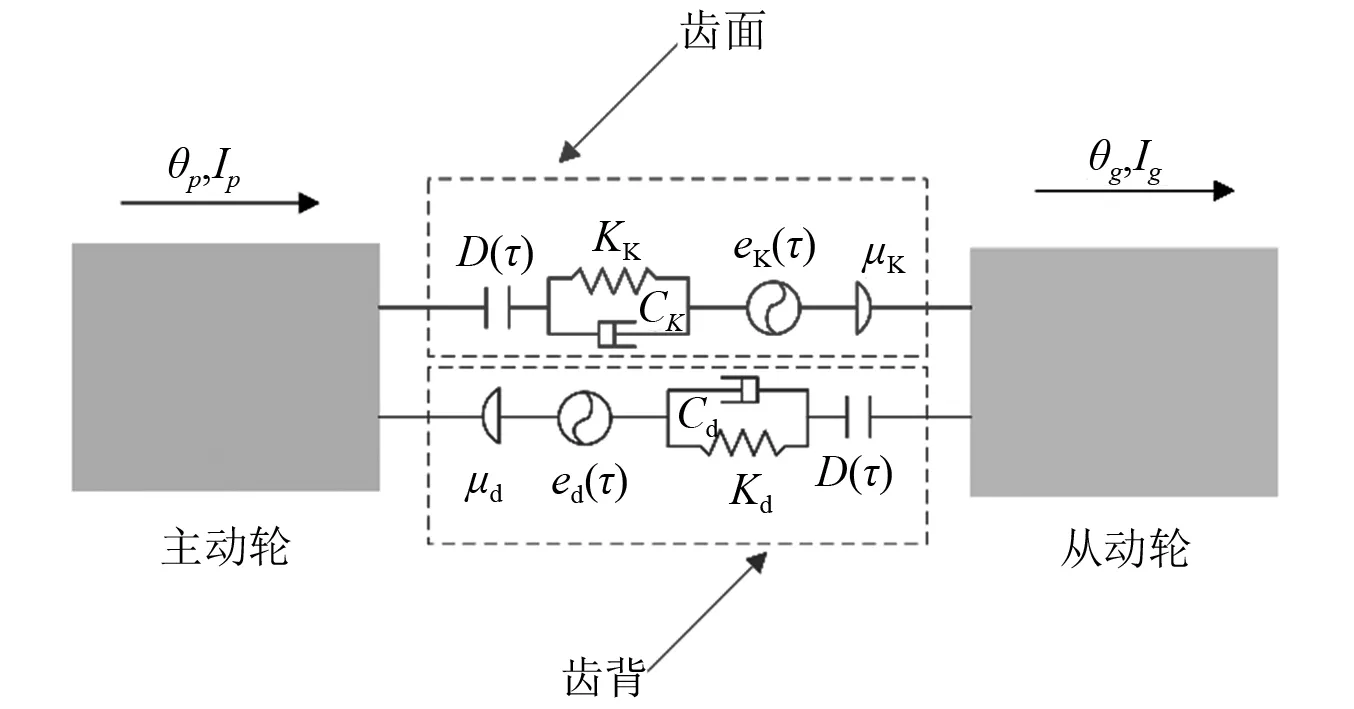
圖1 齒輪副的簡化物理模型Fig.1 A simplified physical model about gear
該模型中主、從動輪的轉動角位移分別為θp和θg,轉動慣量分別為Ip和Ig,齒側間隙為D(τ),齒面嚙合剛度和阻尼分別為KK,CK,齒面摩擦因數為μK;齒背嚙合剛度和阻尼分別為Kd,Cd及齒背摩擦因數為μd;齒輪副動態傳遞誤差為e(τ),其中齒面誤差激勵e(τ)=eK(τ),齒背誤差為激勵e(τ)=ed(τ)。其余算例參數如表1所示。
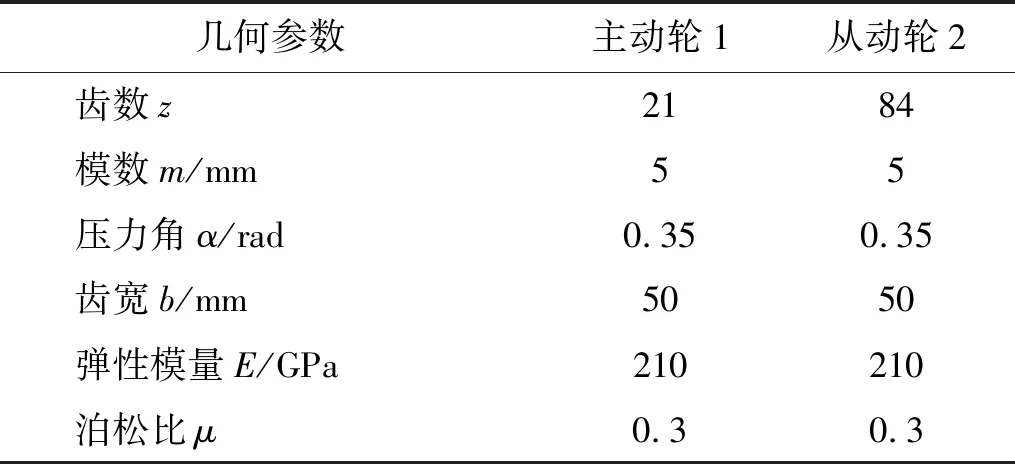
表1 齒輪參數表Tab.1 Gear parameter table
2.1 內嚙合直齒輪系統多狀態嚙合分類

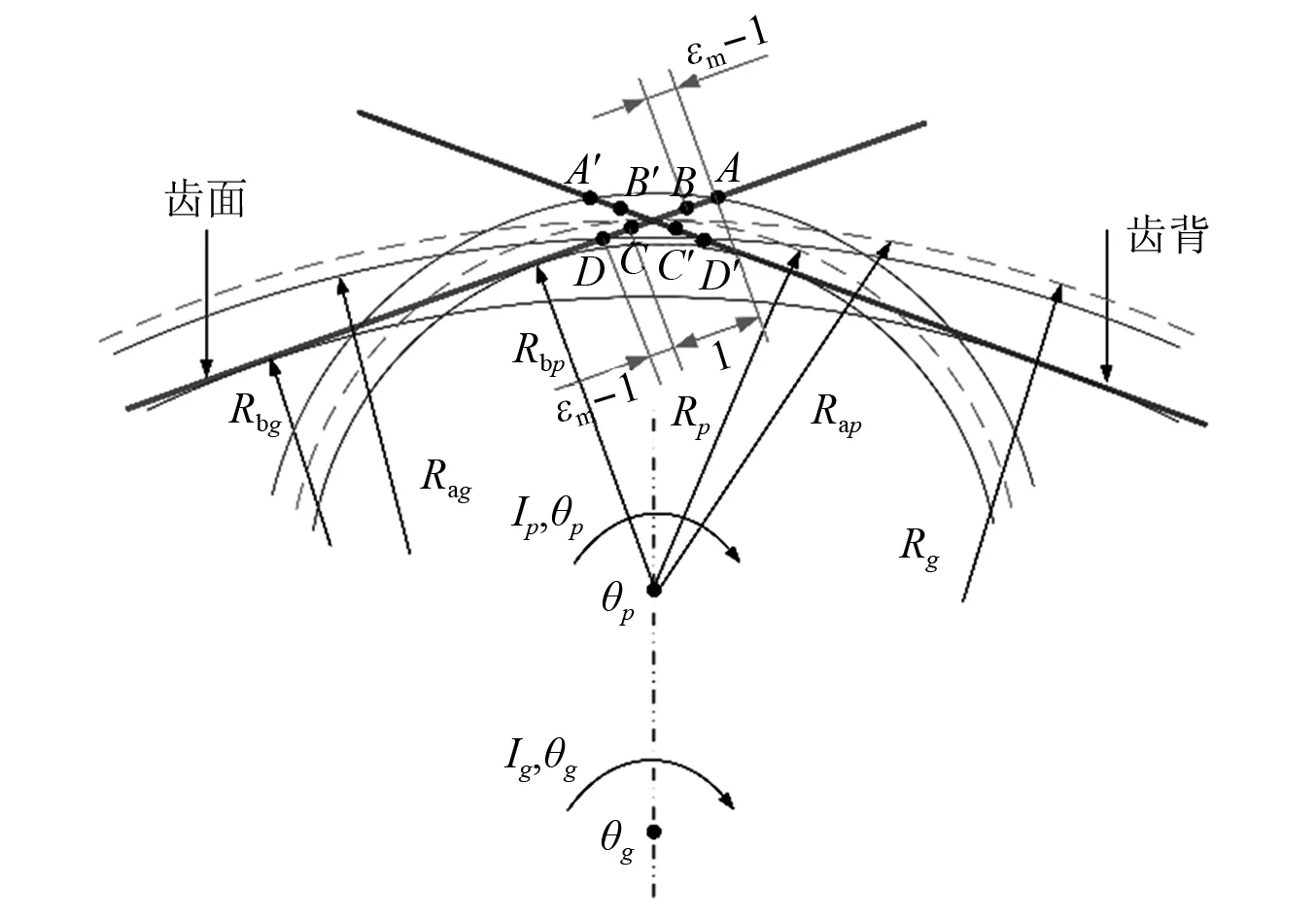
圖2 內嚙合直齒輪的齒面和齒背嚙合示意圖Fig.2 A meshing schematic diagram of a spur gear pair with drive-side and back-side tooth meshes
基于嚙合過程中嚙合點的位置以及相對位移量與齒側間隙的幾何關系,齒輪嚙合狀態及其邊界條件可分為:
式中:Tm=2π/(zpωp)為一個完整的嚙合周期,包括單齒和雙齒嚙合(AC或A′C′);zp,ωp分別為主齒輪的齒數和旋轉角速度。根據上述5種嚙合狀態,分別建立相應的動力學模型如下。
2.2 系統多狀態嚙合動力學建模
2.2.1 雙齒齒面嚙合狀態
雙齒齒面嚙合狀態下嚙合點處受力分析圖,如圖3所示。有兩對輪齒同時參與嚙合,由于存在加工誤差及輪齒的變形,所以對工作區內兩對齒所受載荷的分配有所變化。FNp1,FNp2,FNg1和FNg2為作用在主、從動齒輪上的法向正壓力,方向沿著嚙合線方向。Ffp1,Ffp2,Ffg1和Ffg2為作用在主、從動齒輪上的摩擦力,方向垂直于嚙合線方向。
圖3 雙齒齒面嚙合狀態下嚙合點處受力分析圖Fig.3 A schematic diagram of force analysis of the spur gear pair under double-tooth drive-side meshing state
根據內嚙合齒輪傳動原理和第二牛頓定律,可得雙齒齒面嚙合狀態下主、從動輪的絕對轉動方程
(12)
式中,兩輪齒齒面法向正壓力FNp1,FNg1,FNp2和FNg2,可由式(13)計算得到。式(14)中,Fm為作用在兩輪齒嚙合力,可由式(6)計算得到。
FNp1>=FNg1>=Lk1(τ)Fm,FNp2>=FNg2>=Lk2(τ)Fm
(13)
式中,Lk1(τ),Lk2(τ)為負載分擔比可由文獻[19]得到。作用在兩輪齒齒面的摩擦力Ffp1,Ffg1,Ffp2和Ffg2與摩擦因數μki(τ)(i=1,2)和齒面法向正壓力成正比,可由式(14)計算得到。
Ffp1=Ffg1=λk1(τ)μk1(τ)Lk1(τ)Fm,
Ffp2=Ffg2=λk2(τ)μk2(τ)Lk2(τ)Fm
(14)
式中,時變摩擦力方向系數λki(τ)與嚙合點的位置有關,在節點附近齒面滑移速度方向發生變化,導致摩擦力方向發生變化。故時變摩擦力方向系數λki(τ)與齒面滑移速度vm(t)相關,可由式(11)計算得到。
式(12)中的Sdp1(τ),Sdp2(τ),Sdg1(τ),Sdg2(τ)分別為齒輪副的摩擦力矩,可以寫為
(15)
(16)
將式(13)中的兩個公式相減,即可得到雙齒齒面嚙合狀態下齒輪系統的相對扭轉動力學方程,如式(17)。
(17)

2.2.2 單齒齒面嚙合狀態
單齒齒面嚙合狀態下嚙合點處受力分析圖,如圖4所示。FNp2和FNg2是作用在主、從動齒輪上的正壓力,方向沿著嚙合線方向。Ffp2和Ffg2是作用在主、從動齒輪上的摩擦力,方向垂直于嚙合線方向。
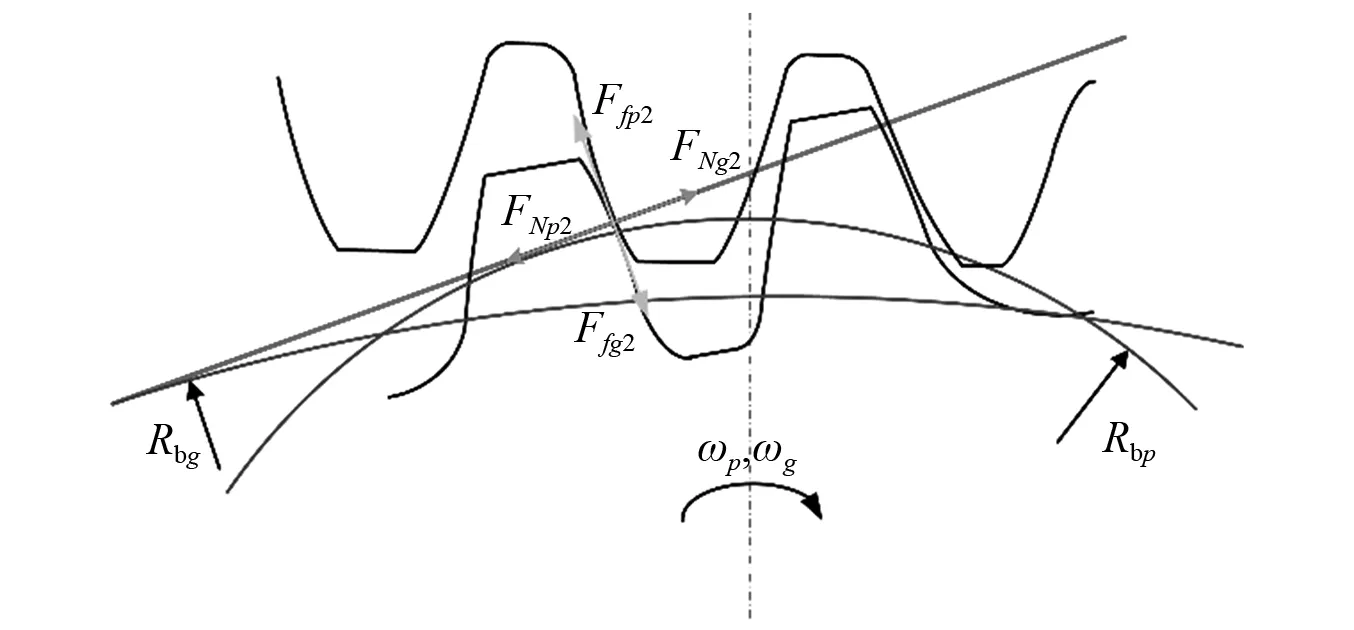
圖4 單齒齒面嚙合狀態下嚙合點處受力分析圖Fig.4 A schematic diagram of force analysis of the spur gear pair under single-tooth drive-side meshing state
根據內嚙合齒輪傳動原理和第二牛頓定律,可得雙齒齒面嚙合狀態下主、從動輪的絕對轉動方程
(18)
式中,兩輪齒齒面法向正壓力FNp2和FNg2,可由式(19)計算得到。式(18)中,Fm為作用在兩輪齒嚙合力,可由式(6)計算得到。
FNp2=FNg2=Fm
(19)
式中,作用在兩輪齒齒面的摩擦力Ffp2和Ffg2與摩擦因數μki(τ)和齒面法向正壓力成正比,可由式(20)計算得到。
Ffp2=Ffg2=λk2(τ)μk2(τ)Fm
(20)
將式(18)中的兩個公式相減,即可得到單齒齒面嚙合狀態下齒輪系統的相對扭轉動力學方程,如式(18)所示。
(21)
2.2.3 雙齒齒背嚙合狀態
雙齒齒背嚙合狀態下嚙合點處受力分析圖,如圖5所示。有兩對輪齒同時參與嚙合過程,由于存在加工誤差及輪齒的變形,所以對工作區內兩對齒所受載荷的分配有所變化。FNp1,FNp2,FNg1和FNg2為作用在主、從動齒輪上的正壓力,方向沿著嚙合線方向。Ffp1,Ffp2,Ffg1和Ffg2為作用在主、從動齒輪上的摩擦力,方向垂直于嚙合線方向。
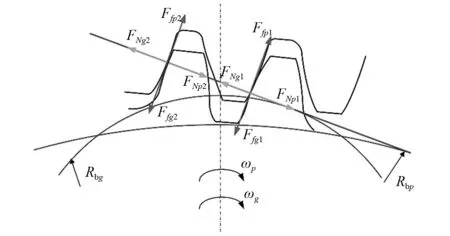
圖5 雙齒齒背嚙合狀態下嚙合點處受力分析圖Fig.5 A schematic diagram of force analysis of gear teeth under double-tooth back-side meshing state
根據內嚙合齒輪傳動原理和第二牛頓定律,可得雙齒齒背嚙合狀態下主、從動輪的絕對轉動方程
(22)
式中,兩輪齒齒面法向正壓力FNp1,FNg1,FNp2和FNg2,可由式(23)計算得到。式(23)中,Fm為作用在兩輪齒嚙合力,可由式(6)計算得到。
FNp1>=FNg1>=Ld1(τ)Fm,FNp2>=FNg2>=Ld2(τ)Fm
(23)
式中,Ld1(τ),Ld2(τ)為負載分擔比可由Pedrero等的研究得到。作用在兩輪齒齒面的摩擦力Ffp1,Ffg1,Ffp2和Ffg2與摩擦因數μdi(τ)(i=1,2)和齒面法向正壓力成正比,可由式(24)計算得到。
Ffp1=Ffg1=λd1(τ)μd1(τ)Ld1(τ)Fm,
Ffp2=Ffg2=λd2(τ)μd2(τ)Ld2(τ)Fm
(24)
式中,時變摩擦力方向系數λdi(τ)與嚙合點的位置有關,在節點附近齒面滑移速度方向發生變化,導致摩擦力方向發生變化。故時變摩擦力方向系數λdi(τ)與齒面滑移速度vm(t)相關,可由式(11)計算得到。
式(22)中的Sdp1(τ),Sdp2(τ),Sdg1(τ),Sdg2(τ)分別為齒輪副的摩擦力矩,可以寫為
(25)
(26)
將式(24)中的兩個公式相減,即可得到雙齒齒面嚙合狀態下齒輪系統的相對扭轉動力學方程,如式(27)所示。
(27)

2.2.4 單齒齒背嚙合狀態
單齒齒背嚙合狀態下嚙合點處受力分析圖,如圖6所示。有一對輪齒同時參與嚙合過程。FNp2和FNg2為作用在主、從動齒輪上的正壓力,方向沿著嚙合線方向。Ffp2和Ffg2為作用在主、從動齒輪上的摩擦力,方向垂直于嚙合線方向。
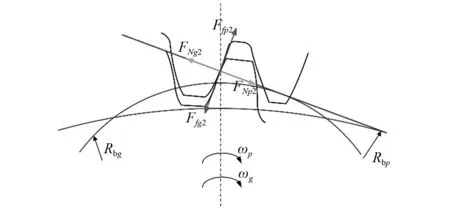
圖6 單齒齒背嚙合狀態下嚙合點處受力分析圖Fig.6 A schematic diagram of force analysis of gear teeth under single-tooth back-side meshing state
根據內嚙合齒輪傳動原理和第二牛頓定律,可得單齒齒背嚙合狀態下主、從動輪的絕對扭轉方程
(28)
式中,兩輪齒齒面法向正壓FNp1,FNg1,FNp2和FNg2,可由式(29)計算得到。式(29)中,Fm為作用在兩輪齒嚙合力,可由式(6)計算得到。
FNp2=FNg2=Fm
(29)
式中,作用在兩輪齒齒面的摩擦力Ffp2和Ffg2與摩擦因數μdi(τ)和齒面法向正壓力成正比,可由式(30)式計算得到。
Ffp2=Ffg2=λd2(τ)μd2(τ)Fm
(30)
將式(28)中的兩個公式相減,即可得到雙齒齒面嚙合狀態下齒輪系統的相對扭轉動力學方程,如式(31)所示。
(31)
2.2.5 輪齒脫離狀態
脫齒狀態示意圖,如圖7所示。根據內嚙合齒輪傳動原理和第二牛頓定律,可得輪齒脫離狀態下主、從動輪的運動學方程
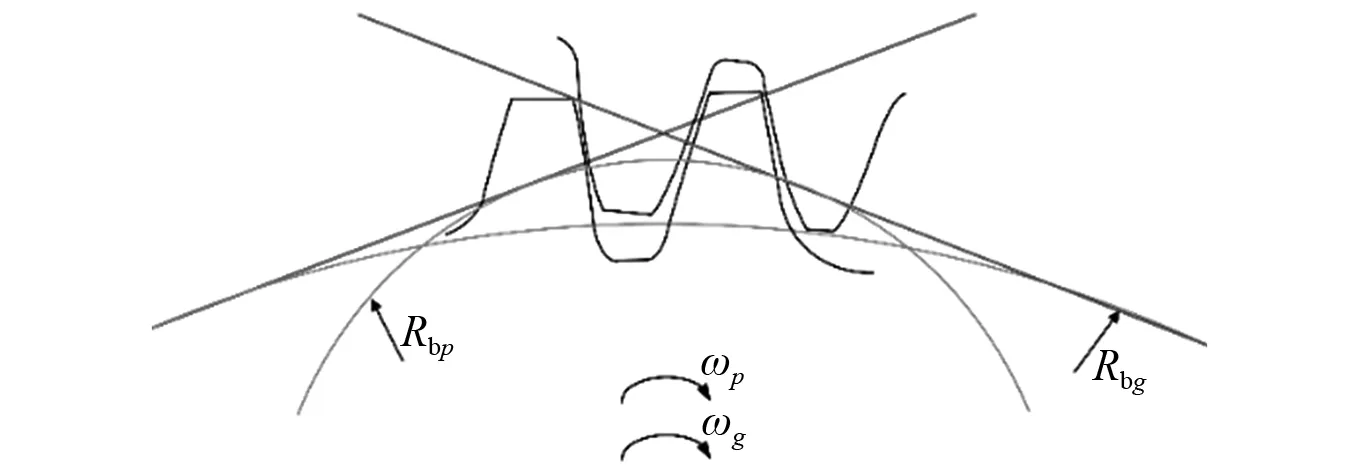
圖7 脫齒狀態示意圖Fig.7 A schematic diagram of the gear pair under teeth disengaged state
(32)
將式(32)中的兩個公式相減,即可得到輪齒脫離狀態下的動力學方程,如式(33)所示。
(33)
2.3 系統多狀態嚙合的無量綱歸一化模型

(34)

(35)
(36)
(37)
(38)

(39)
其中
h(t,x3)=
(40)
hdt(t,x3)=
(41)
(42)
因此,得到包含雙齒齒面嚙合、單齒齒面嚙合、雙齒齒背嚙合、單齒齒背嚙合、輪齒脫離等5種狀態的內嚙合圓柱直齒輪系統非線性動力學無量綱歸一化表達式,如式(39)。該模型為研究齒輪系統的非線性動力學和多態嚙合行為提供了模型基礎。
3 系統多狀態嚙合行為辨識與分析
通過第2章的分析,得到漸開線內嚙合圓柱直齒輪多狀態嚙合的動力學模型。因此,根據輪齒間相對位移量與齒隙的數值關系,可以觀察到相平面內五態嚙合行為的存在區域。通過時變齒隙能夠準確辨別工作區內單雙齒嚙合情況,假設Dd為在雙齒嚙合區域的無量綱齒隙,Ds為在單齒嚙合區域的無量綱齒隙,其中Ds>Dd。
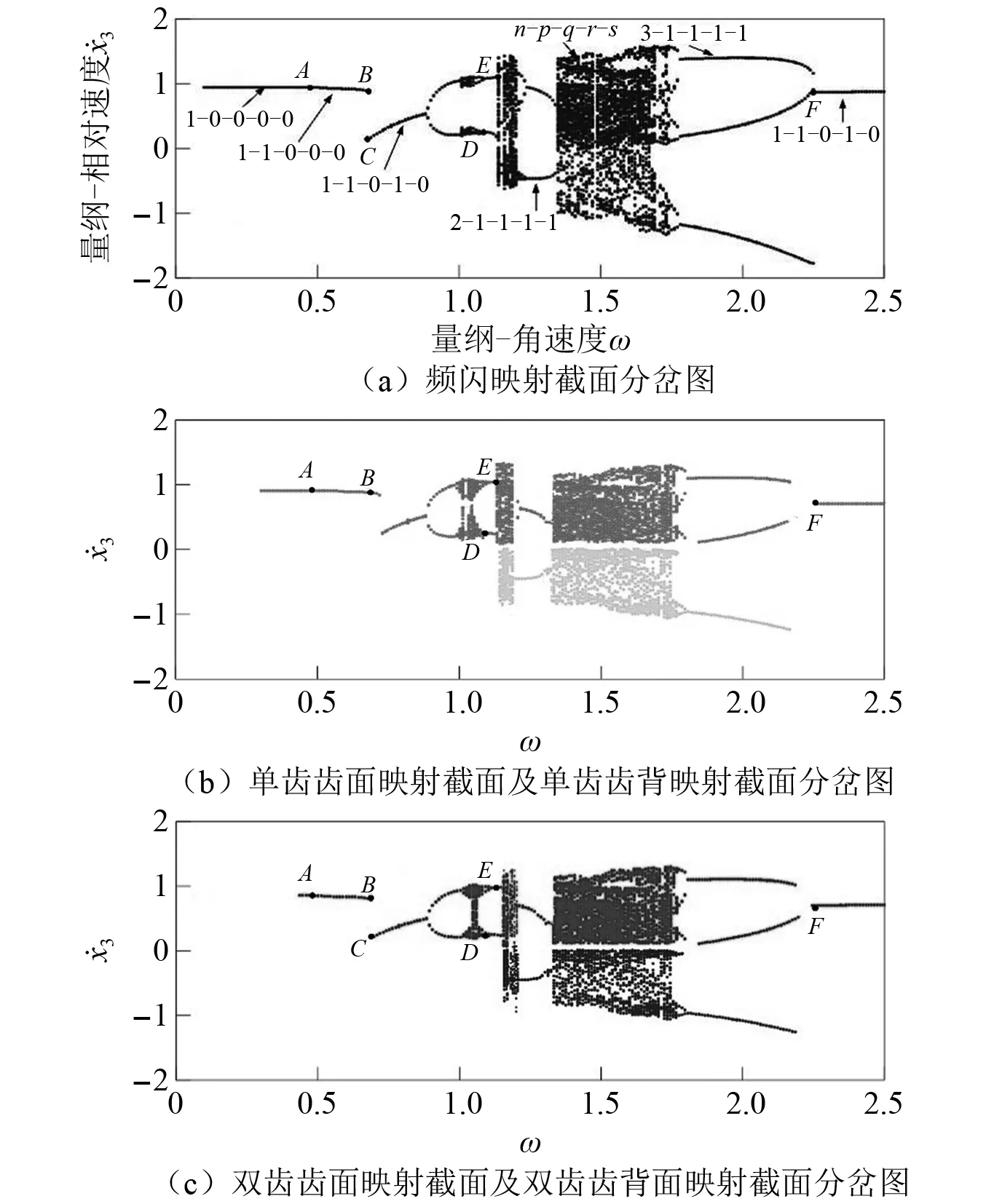
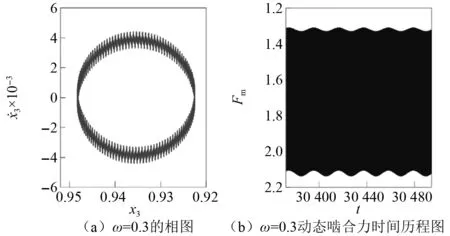
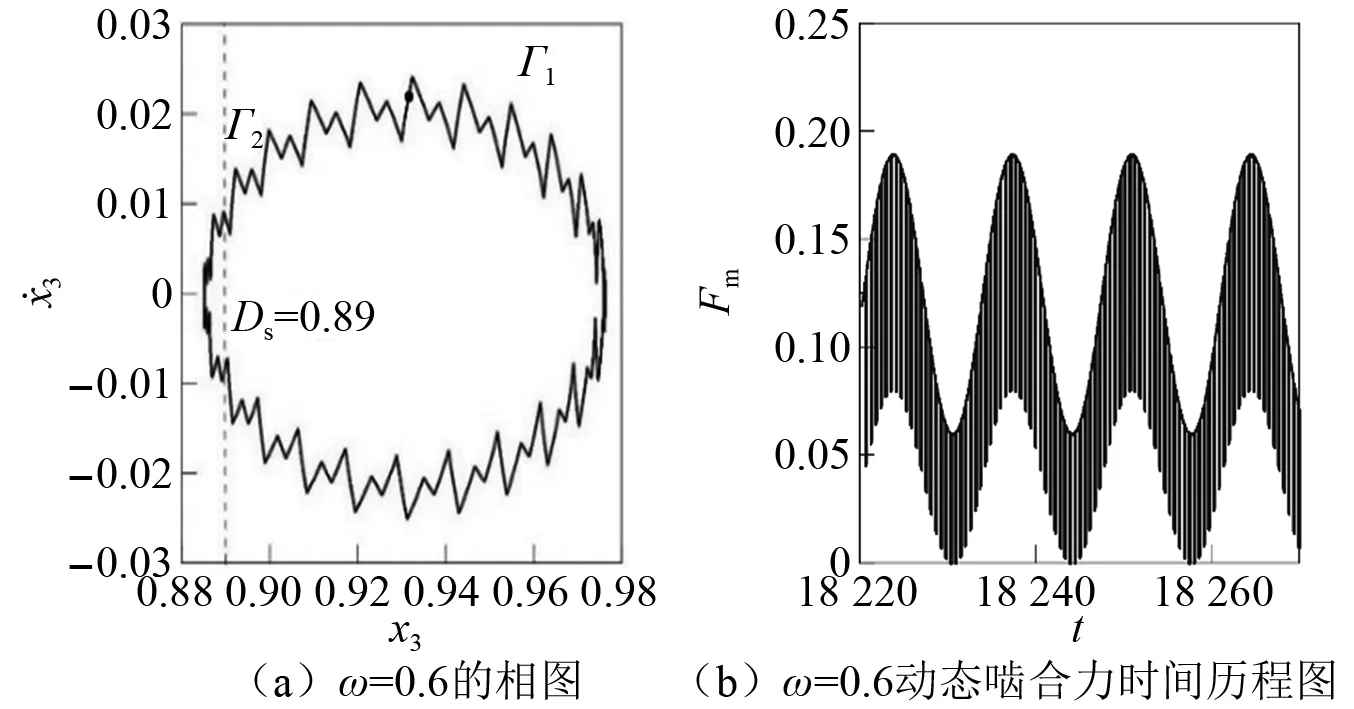
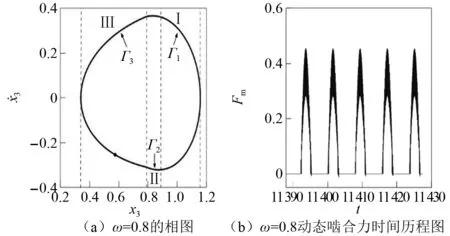
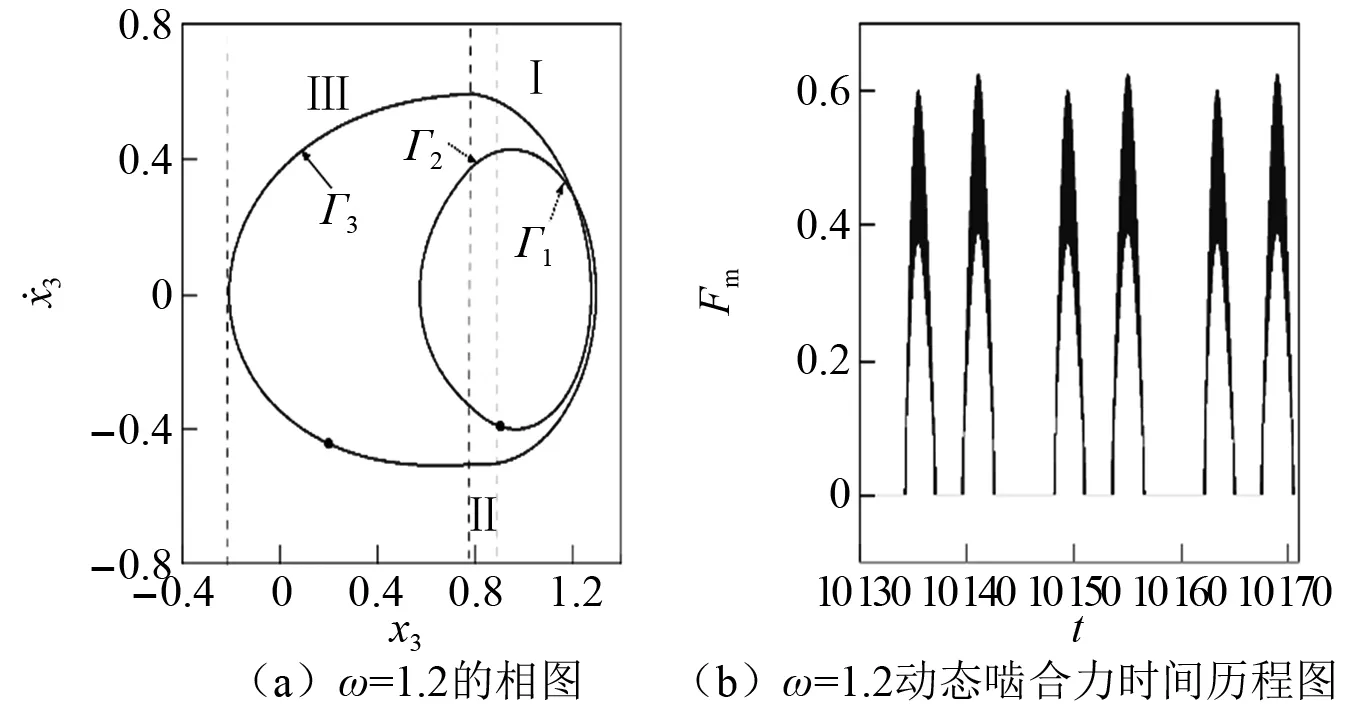
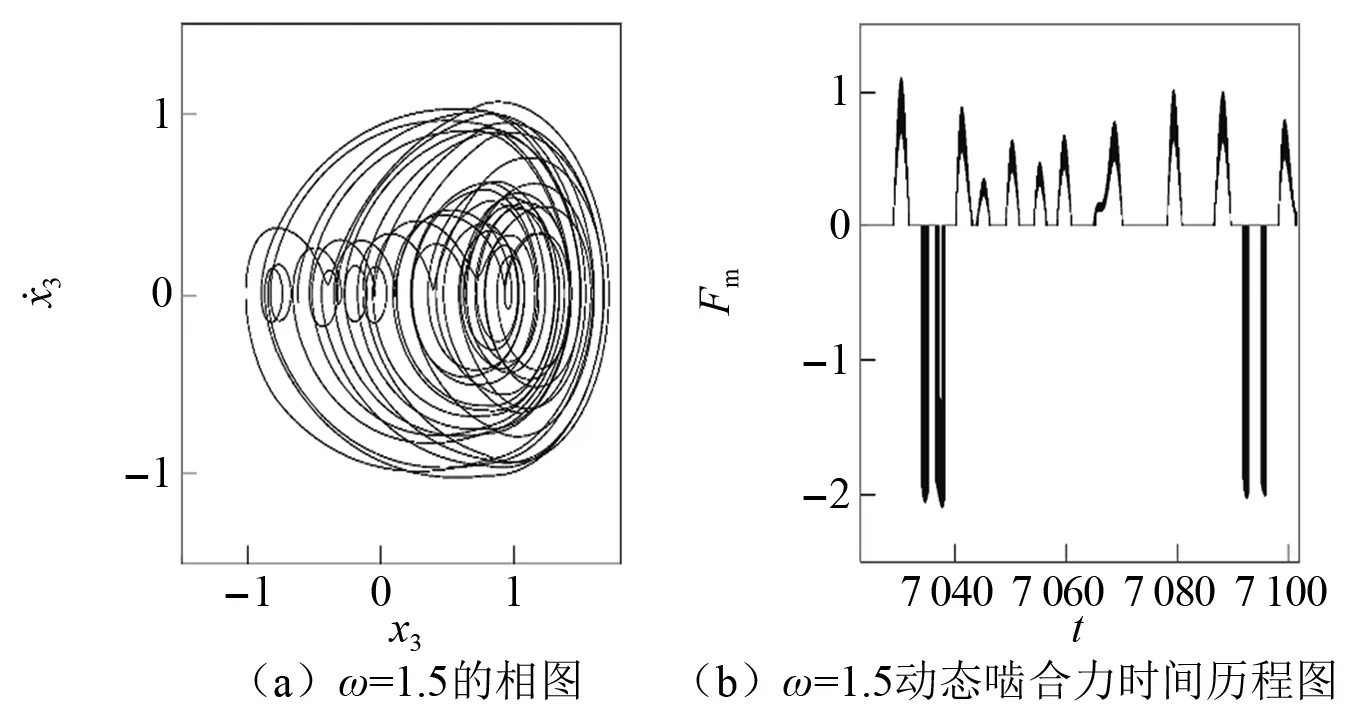
如圖8所示,單齒齒面嚙合存在于Ⅰ區(x3≥Ds)。單齒脫離存在于Ⅱ∪Ⅲ∪Ⅳ區(|x3| 圖8 相平面五態所占面積Fig.8 The existence area of five meshing states in the phase plane 根據上述5種不同的Poincaré映射部分,齒輪系統的多狀態嚙合運動可以用符號n-p-q-r-s來表示。其中:n為系統周期運動次數;p為單齒齒面嚙合次數;q為單齒齒背嚙合次數;r為雙齒齒面嚙合次數;s為雙齒齒背嚙合次數。若p,q,r或s為零,則表示無單齒齒面嚙合、單齒齒背嚙合、雙齒齒面嚙合、雙齒齒面背嚙合多態嚙合的發生。通過分析n-p-q-r-s的運動特性,可得到齒輪系統的多態嚙合行為的非線性動力學特性。 設F=0.16,ε=0.23且以嚙合頻率ω作為控制變量。基于構造的5種不同Poincaré映射,分析嚙合頻率變化對齒輪系統在彈流潤滑下的多狀態嚙合行為的振動特性。圖9(a)深灰色部分為在頻閃映射截面Σn下系統隨嚙合頻率逐漸增大的分岔圖。圖9(b)中深灰色為系統在單齒齒面映射截面Σp的分岔圖,淺色為系統在單齒齒背映射截面Σq的分岔圖。圖9(c)淺灰色部分為雙齒齒面映射截面Σr的分岔圖,深灰色為雙齒齒背映射截面Σs的輸出圖。 圖9 隨著ω增加不同Poincaré映射截面的分岔圖Fig.9 Bifurcation diagrams in different Poincareé mapping sections with the increase in ω 由圖9可知,當嚙合頻率ω較小時(A點左側),系統表現為1-0-0-0-0運動,圖10(a)和圖10(b)分別為ω=0.3的相圖和動態嚙合力時間歷程圖。此時系統的動態嚙合力始終大于零,表明齒面嚙合狀態持續存在,且不存在脫嚙和齒背嚙合。由于振動幅度較小,齒輪系統的輪齒相對位移和相對速度在單齒和雙齒之間跳躍更為明顯。 圖10 相圖與動態嚙合力時間歷程圖(1)Fig.10 Phase portraits and time histories of dynamic meshing force (1) 隨嚙合頻率ω逐漸增大(A點和B點之間),系統表現為1-1-0-0-0運動。圖11(a)和圖11(b)分別為ω=0.6的相圖和動態嚙合力時間歷程圖,“·”為Poincaré映射點。在圖11(a)中相軌跡跨越了單齒隙值的一半,其中Γ1為單齒和雙齒齒面嚙合區域,Γ2為單齒脫離和雙齒齒面嚙合區域。圖11(b)為相應的動態嚙合力,動態嚙合力在單齒區域為零,而雙齒區域的動態嚙合力始終大于零,表明單齒脫離行為發生存在周期性。 圖11 相圖與動態嚙合力時間歷程圖(2)Fig.11 Phase portraits and time histories of dynamic meshing force (2) 經過C點后,系統轉變為穩定的1-1-0-1-0運動,相軌跡較之前更為平滑但仍然存在單齒和雙齒脫離。其中,Γ1為單齒和雙齒齒面嚙合區域,Γ2為單齒齒背和雙齒齒面嚙合區域,Γ3為單、雙齒脫嚙狀態,如圖12(a)所示。系統的動態嚙合力周期性地出現在大于零與等于零之間,如圖12(b)所示。 圖12 圖與動態嚙合力時間歷程圖(3)Fig.12 Phase portraits and time histories of dynamic meshing force (3) 當嚙合頻率繼續增加,齒輪系統由1-1-0-1-0運動通過倍化分岔進入短混沌運動。隨后系統轉變為周期2運動,主動輪與被動輪的嚙合次數增加一倍,表現為2-2-0-2-0運動,其相圖和動態嚙合力時間歷程圖如圖13所示。 圖13 相圖與動態嚙合力時間歷程圖(4)Fig.13 Phase portraits and time histories of dynamic meshing force (4) 在D點,齒面嚙合、齒背接觸以及脫嚙的次數發生改變,系統過渡到2-1-1-1-1運動。在E點,經周期倍化分岔再次進入混沌運動,即n-p-q-r-s運動。此時,相軌跡變得雜亂無章且穿過Ds,-Ds,Dd和-Dd,如圖14(a)所示;動態嚙合力出現小于零和等于零(Fm>0,Fm=0和Fm<0)的情況,如圖14(b)所示。表明系統出現單齒齒面嚙合、雙齒齒面嚙合、脫嚙、單齒齒背嚙合和雙齒齒背嚙合5種狀態嚙合行為。 圖14 相圖與動態嚙合力時間歷程圖(5)Fig.14 Phase portraits and time histories of dynamic meshing force (5) 隨著嚙合頻率進一步增加,系統由混沌運動變為3-1-1-1-1運動。在F點,系統經逆倍化分岔由3-1-1-1-1運動退化為穩定的1-1-0-1-0運動,即系統經F點后發生齒面嚙合、單雙齒的脫嚙等行為。 由以上分析結果可知,當嚙合頻率ω較小時,系統保持穩定的齒面嚙合狀態。隨著嚙合頻率ω持續增大,系統逐漸出現單雙齒的脫嚙、單齒齒背嚙合和雙齒齒背嚙合等多狀態嚙合行為。在B點和F點(0.5 (1) 基于Johnson接觸力模型,提出了一種計及時變齒側間隙和嚙合過程中能量耗散的漸開線內嚙合直齒輪傳動系統動態嚙合力計算模型,考慮齒面摩擦、齒隙和綜合傳動誤差的情況下,建立內嚙合齒輪系統的五種不同的嚙合狀態及其對應的邊界條件,推導考慮齒輪系統5態嚙合行為以及時變齒隙的無量綱歸一化非線性動力學模型。并克服傳統嚙合力模型的缺點,提出一個新型動態嚙合力計算方式并代入上述動力學方程。 (2) 通過構造5種Poincaré映射,研究了在5種嚙合行為下的相軌跡和動態嚙合力演化規律,發現當嚙合頻率ω=0.3時,系統表現為穩定的周期運動。隨著嚙合頻率增加,分岔、混沌運動相繼發生。嚙合頻率的變化對齒輪系統的穩定性及嚙合力的影響較大。此外,分岔和混沌可改變多態嚙合行為的類型和嚙合力方向上的突變。 (3) 嚙合頻率、負載等系統參數對五態嚙合行為有很大影響。隨著參數的不斷變化,逐漸出現單、雙齒齒面嚙合以及單、雙齒齒背嚙合,嚙合行為逐漸變得復雜。合理地選擇嚙合頻率,可以避免輪齒沖擊行為,以改善其動態性能和應用的可靠性。本文也為進一步研究內嚙合齒輪系統的動力學特性分析奠定了基礎。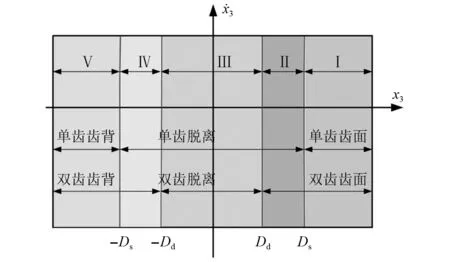

4 結 論
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38工業設計(2022年8期)2022-09-09 07:43:20軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30北京測繪(2020年12期)2020-12-29 01:33:58中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50數學物理學報(2020年2期)2020-06-02 11:29:24裝備制造技術(2019年12期)2019-12-25 03:06:46中國洗滌用品工業(2019年4期)2019-05-11 09:27:34家庭影院技術(2017年9期)2017-09-26 03:41:45光學精密工程(2016年6期)2016-11-07 09:07:19
