稻油兼用型成條飛播裝置設(shè)計與試驗
2023-09-23 06:39:26黃小毛朱耀宗李文成
農(nóng)業(yè)機械學(xué)報 2023年9期
關(guān)鍵詞:作業(yè)
黃小毛 劉 宇 朱耀宗 李文成 張 順
(1.華中農(nóng)業(yè)大學(xué)工學(xué)院,武漢 430070; 2.農(nóng)業(yè)農(nóng)村部長江中下游農(nóng)業(yè)裝備重點實驗室,武漢 430070)
0 引言
水稻和油菜是我國兩種重要的大宗農(nóng)作物,前者是絕對主糧作物,后者是主力油料作物[1],二者在我國的現(xiàn)有種植模式都是直播和移栽多種形式并存[2-6]。這其中,無人機播撒(飛播),作為效率和地形地表適應(yīng)性最好的直播方式,近年來在我國水稻和油菜的快速搶墑播種中發(fā)展迅速[5-7]。
從精量條播[8-13]到精密穴播[14-17],水稻和油菜的機械化直播,在傳統(tǒng)地面機具播種技術(shù)中已研究較為充分,但都是基于地面機具功能特點和作業(yè)特性進行的,與無人機的高速作業(yè)以及對搭載裝置的電控化、模塊化和輕量化要求不相符合,因此不能直接照搬使用。
無人機直播是近年來隨植保無人機逐步發(fā)展起來的一種新興技術(shù)。羅錫文等[18]研制了一種搭載于六旋翼無人機的離心撥盤式播撒裝置,宋燦燦等[19]設(shè)計一種氣力式無人機播撒裝置,高學(xué)梅等[20]研制一種可懸掛于多種無人機平臺的水稻及綠肥播撒裝置。大疆無人機公司于2018年6月推出一種離心甩盤式播撒裝置,極飛無人機公司于2018年底推出一種與窩眼或槽輪滾筒排種器配合的氣送涵道式播撒裝置,2019年又相繼推出“螺旋供種+水平離心甩盤”結(jié)合的睿播1.0和“螺旋供種+垂直離心甩盤”結(jié)合的睿播2.0播撒裝置。因投種高度高、旋翼氣流擾動強,以上這些飛播裝置的作業(yè)效果均相對粗放,種子落地散亂無序、作業(yè)幅寬界限模糊,種子落點精度遠低于無人機作業(yè)定位精度,發(fā)芽出苗后植株通風(fēng)向陽效果、土壤肥效利用效率不及地面播種機具的條播和穴播方式。
為探討旋翼氣流對種子運移軌跡的影響,張青松等[21]建立了四旋翼無人機旋翼氣流場仿真模型,研究了旋翼氣流場對油菜種子的空中漂移運動軌跡的影響。黃小毛等[22]在分析極飛P20型四旋翼無人機下洗氣流場分布規(guī)律的基礎(chǔ)上,設(shè)計了一種與之配套的以人工拾舉方式進行銜接的專用導(dǎo)種裝置,抑制無人機旋翼氣流對下落種子籽粒的擾動作用,基本實現(xiàn)了油菜的精量條播。但該裝置導(dǎo)種管較長,無法實現(xiàn)自動折疊,黃小毛等[23]又基于六旋翼無人機平臺,設(shè)計了一種自動折疊的導(dǎo)種投種管和氣送集中排種式油菜專用排種系統(tǒng),實現(xiàn)了油菜的條播。此外,珠海羽人無人機公司于2018年推出一款可實現(xiàn)水稻精量條播的無人機裝置。
本文從成條飛播裝置的通用性角度出發(fā),設(shè)計、試制加工、試驗優(yōu)化和驗證測試一種可同時適應(yīng)水稻和油菜條播農(nóng)藝要求的稻油兼用型成條飛播裝置。
1 裝置結(jié)構(gòu)與工作原理
1.1 裝置總體結(jié)構(gòu)
以額定承載質(zhì)量15 kg的六旋翼無人機為搭載平臺,整機總體結(jié)構(gòu)如圖1所示,由稻油兼用型成條飛播裝置單體、無人機平臺、承載桿組成,主要技術(shù)參數(shù)如表1所示。
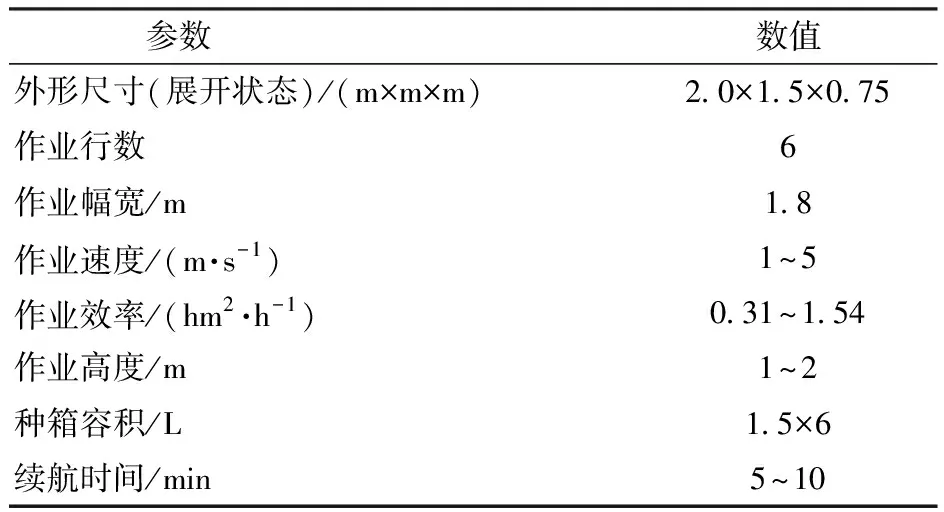
表1 條播無人機主要技術(shù)參數(shù)
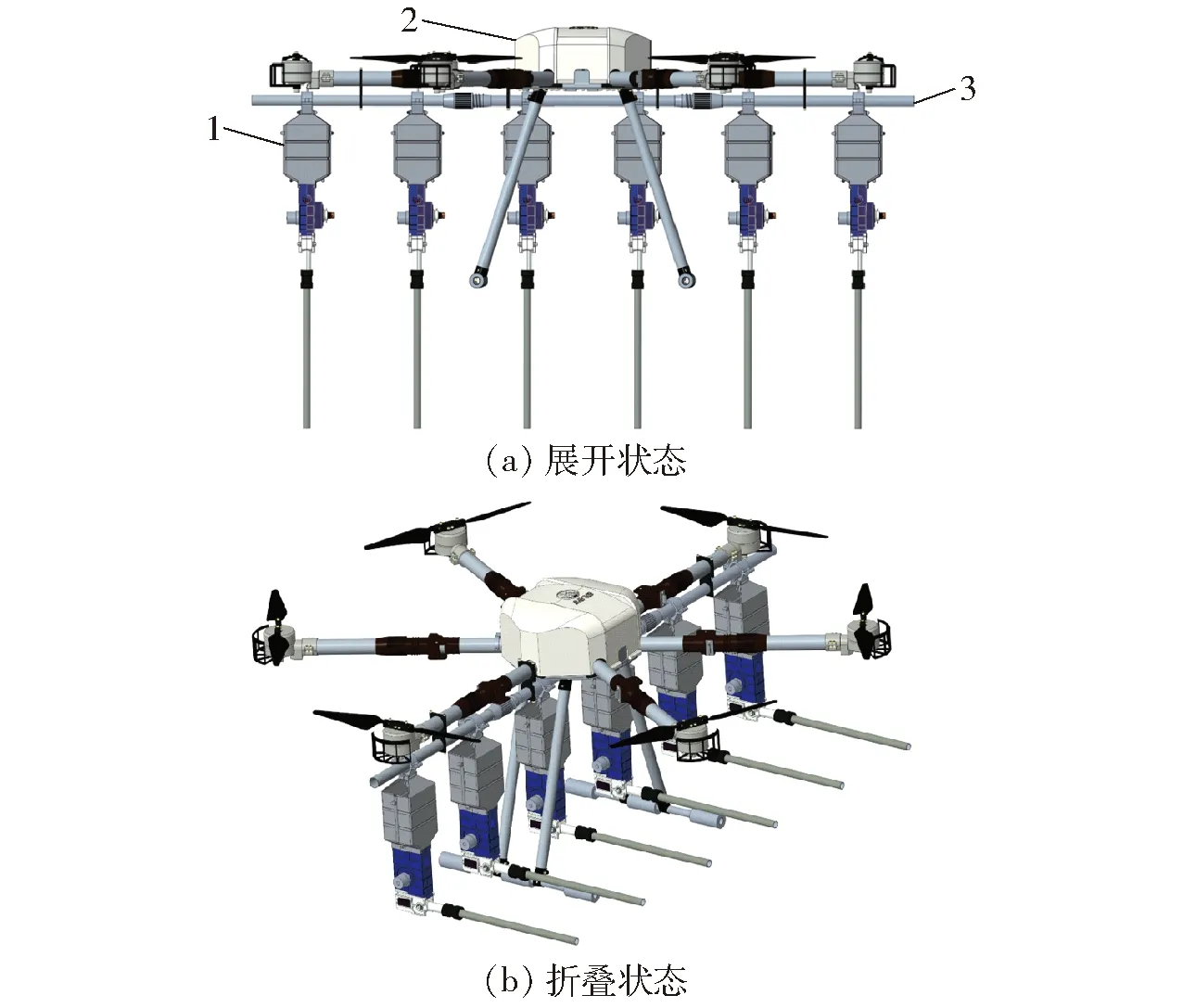
圖1 條播無人機總體結(jié)構(gòu)示意圖
稻油兼用型成條飛播裝置單體結(jié)構(gòu)如圖2所示,由管夾、種箱、排種器、導(dǎo)種投種管和導(dǎo)種管折疊裝置組成。

圖2 稻油兼用型成條飛播裝置單體
其中外槽輪排種器結(jié)構(gòu)如圖3所示,由直流電機、殼體、清種毛刷、排種輪、調(diào)節(jié)輪、螺紋固定環(huán)和牽引套筒等組成。
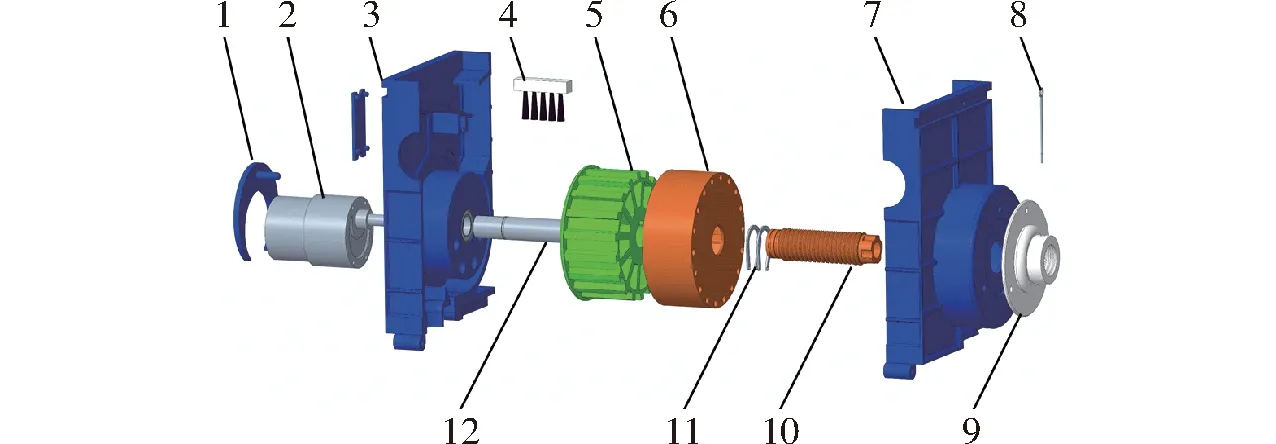
圖3 排種器結(jié)構(gòu)爆炸圖
1.2 工作原理
稻油兼用型成條飛播裝置各單體通過管夾固定在無人機平臺承載桿上,并可在承載桿上調(diào)節(jié)裝置安裝間距,實現(xiàn)播種行間距調(diào)整。作業(yè)時,無人機升空后,由導(dǎo)種管折疊裝置驅(qū)動,將導(dǎo)種投種管由折疊狀態(tài)變?yōu)樯煺範顟B(tài),進入作業(yè)航線后排種器進入作業(yè)狀態(tài)。排種輪在清種毛刷配合下將定量種子從種群分離,經(jīng)過運種后從排種器另一側(cè)下方投入導(dǎo)種投種管,導(dǎo)種投種管屏蔽機翼平面下方急劇的氣流干擾,使種子保持穩(wěn)定的下落軌跡并最終落入土壤中,實現(xiàn)種子落地成條。播種作業(yè)結(jié)束后,導(dǎo)種投種管恢復(fù)至折疊狀態(tài),以便于無人機降落。
為滿足油菜、水稻等多種不同作物的播量要求,事先通過手動旋轉(zhuǎn)牽引套筒,帶動套在排種輪上的調(diào)節(jié)輪實現(xiàn)左右運動,進而改變排種輪型槽的有效工作長度,達到調(diào)整單位時間排種量的目的。
2 關(guān)鍵部件設(shè)計
2.1 排種器排種過程分析
排種器是稻油兼用型成條飛播裝置的關(guān)鍵部件。如圖4所示,排種過程為:種箱中種子在重力作用下進入排種器,在進種斜面引導(dǎo)下進入進種口,在充種腔中隨排種輪轉(zhuǎn)動形成不同程度的擾動,從充種腔底部開始逐步完成對型槽的充種,清種毛刷將多余種子清回充種腔,被囊種后種子經(jīng)運種從出種口進入下方導(dǎo)種投種裝置。
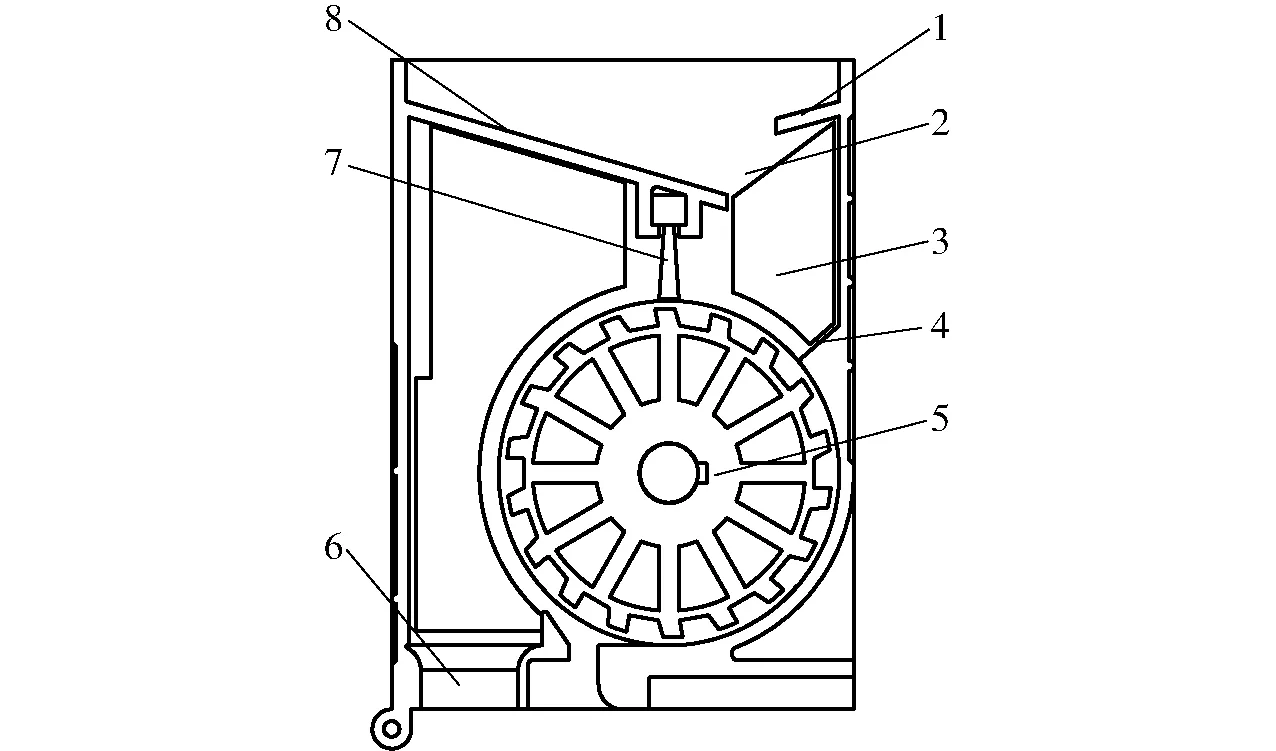
圖4 排種器結(jié)構(gòu)示意圖
2.2 排種器進種口設(shè)計
為實現(xiàn)電驅(qū)化和輕量化,應(yīng)盡量減小相關(guān)零部件的尺寸及質(zhì)量,為此需合理控制充種、排種過程中的阻力,以減小對排種電機的扭矩要求。
選用種子長寬比較為典型的2種常規(guī)稻品種和1種典型油菜品種,經(jīng)試驗測定種子的物理特性參數(shù)(表2),為相關(guān)設(shè)計計算過程提供依據(jù)。

表2 典型品種水稻及油菜種子的物理特性參數(shù)
2.2.1充種排種過程受力分析
在實際試驗試制過程中發(fā)現(xiàn),在常規(guī)排種器充種腔中,工作時排種輪逆時針轉(zhuǎn)動,阻力來源于充種初始位置和從充種初始位置到清種毛刷位置的充種過程中。在充種初始位置,部分種子與轉(zhuǎn)動的排種輪、排種器外殼產(chǎn)生摩擦阻力;在充種過程中,阻力則主要來自于充種腔中排種輪型槽附近種子的摩擦力和上方種群產(chǎn)生的壓力。
將某個排種輪型槽剛進入充種腔的位置定義為初始充種位置,此位置種子的受力分析如圖5所示,排種輪為種子提供充種動力,以克服種子與排種器殼體、種子間摩擦阻力和來自上方種子的壓力。
忽略種子自身重力、種子及型槽的形狀影響,分析得到種子受力平衡方程為
(1)

(2)
式中Fy——種子在圓周方向上所受合力,N
Fx——種子在排種輪徑向上所受合力,N
FN2——排種輪型槽為種子提供的動力,N
FN1——種子與排種器外殼之間的壓力,N
Ff1——種子間摩擦阻力,N
Ff2——種子與排種器殼體間摩擦阻力,N
M——當前種子和垂直上方種子的重力總和,N
μ1——種子間摩擦因數(shù)
μ2——種子與排種器殼體之間摩擦因數(shù)
H——上方種箱中種子高度,mm
D——排種輪直徑,mm
m——種子千粒質(zhì)量,g
d——種子橫截面直徑,mm
θ——種子在初始充種位置相對于排種輪中心坐標系的相位角,(°)
g——重力加速度,m/s2
考慮到排種輪厚度,在充種初始位置存在一層種子與排種輪、排種器外殼摩擦,結(jié)合式(1)整理得到排種輪在充種初始位置提供的最小動力應(yīng)大于產(chǎn)生的阻力,即
(3)
式中FN——排種輪在初始位置應(yīng)提供的最小動力,N
L——排種輪厚度,mm
lmin——種子長度極小值,mm
在初始充種位置以外的其他相位角處,位于充種腔中的排種輪型槽也需使型槽中種子克服種子間摩擦力和來自上方種子的壓力。在充種角度范圍內(nèi),排種輪需提供克服阻力的最小動力為
(μ1sinφ+cosφ)}dφ
(4)
式中Ff——排種輪在充種腔中為克服種子間阻力和上方種子壓力需要提供的動力,N
φ——排種輪與種子接觸時,種子位置相對于排種輪中心坐標系的相位角,(°),在初始位置等于θ
考慮驅(qū)動排種輪轉(zhuǎn)動的最小扭矩要求,綜合上述充種阻力,要求排種電機的扭矩T滿足
(5)
式中F——在充種和排種過程中排種輪需要提供的最小動力,N
通過式(2)和圖6所示幾何關(guān)系,計算充種初始位置種子相對排種輪中心坐標系的相位角θ。當最大厚度或?qū)挾鹊姆N子在此位置時,其他種子均可能存在與排種輪及排種輪外殼的摩擦,故種子橫截面直徑選用測量種子中寬度或厚度中的極大值,即d=3.66 mm,則充種初始位置,種子相對排種輪中心坐標系的相位角θ=28°。

圖6 充種起始角幾何關(guān)系
式(3)、(4)中,H為種箱中種子高度,根據(jù)整機布局及載重設(shè)計為180 mm;排種輪直徑D計算時采取外槽輪常用值60 mm;為布局協(xié)調(diào),排種輪厚度設(shè)計為與舵機同寬度,即L為30 mm;考慮在排種輪厚度方向上存在最多數(shù)量的種子,lmin為7.56 mm,種子橫截面直徑d為3.66 mm;實測摩擦因數(shù)μ1為0.6,μ2為0.51。代入式(3)~(5),計算得到F=81.32 N,T≥2.44 N·m。而滿足尺寸及質(zhì)量要求的直流減速電機最大扭矩為0.5 N·m左右,無法滿足要求,因此需要進行相應(yīng)減阻設(shè)計。根據(jù)F=FN+Ff分析可得,在排種輪運行過程中,來自上方種箱種子的阻力和壓力對總阻力作用明顯,故在充種腔上方設(shè)計擋種板,排種輪充種初始位置設(shè)計減阻斜面以減小種子與排種輪、排種器外殼的摩擦阻力。如圖4所示,擋種板與進種斜面之間開口為進種口,使用充種初始位置,種子相對排種輪中心坐標系的相位角θ=28°作為減阻斜面的傾角,可防止絕大多數(shù)種子與排種器外殼摩擦,減少阻力,經(jīng)減阻設(shè)計后排種輪受力為
F=Ff
(6)
此時,初始充種位置處種子與排種器外殼阻力Ff2消失,垂直方向種子高度從180 mm減少至30 mm,代入驗算數(shù)據(jù)得驅(qū)動排種輪所需最低扭矩T=0.25 N·m。
選取驅(qū)動電機為億星科技JGB37-520型直流減速電機,電機參數(shù)為:直徑37 mm、長度47 mm、轉(zhuǎn)速66 r/min、額定扭矩0.45 N·m,滿足設(shè)計要求。
2.2.2進種斜面設(shè)計及進種口尺寸確定
為使種箱中種子在重力作用下穩(wěn)定有序地進入充種腔,排種器上方設(shè)有引導(dǎo)種子進入充種腔的進種斜面。根據(jù)物料學(xué)分析,進種斜面傾角應(yīng)大于種子自然休止角,種子方可順利流動。經(jīng)測量,水稻種子自然休止角在30°~40°之間,故將進種斜面傾角設(shè)計為40°。
進種斜面和擋種板之間為進種口,進種口高度滿足大多數(shù)種子物料特性時,可使種子順利進入充種腔。參考外槽輪型槽開口寬度設(shè)計原理,當型槽開口寬度為種子最大長度的1.4倍時,種子可順利充入型槽[24-25]。故進種口從進種斜面下方至擋種板之間,高度尺寸大于1.4倍種子最大長度,結(jié)合布局,最后確定為2倍種子最大長度,即20 mm。
2.3 排種器排種輪設(shè)計
2.3.1排種輪型槽截面形狀及尺寸確定
排種輪型槽常見截面形狀主要為矩形、U形和勺形。3 種槽型中,勺形型槽充種效果和排種均勻性更好[24-25],故采用勺形截面設(shè)計型槽。
勺形截面型槽主要參數(shù)為開口寬度W1和深度h。水稻種子充入型槽時,以2 粒橫放及1 粒縱放的情況最多[24-25]。故在勺形槽中,開口寬度由種子的最大長度決定,且其寬度應(yīng)為種子最大長度的1.1倍。型槽深度取決于種子最大寬度和厚度的極值,型槽深度h應(yīng)取種子最大寬度或厚度的1.4倍[24-25]。上述尺寸確定滿足關(guān)系式
(7)
式中l(wèi)max——種子最大長度,mm
dmax——種子最大寬度或厚度,mm
為適應(yīng)雜交稻、常規(guī)稻和油菜等不同品種作物播量的大范圍可調(diào)需求,除采用調(diào)節(jié)排種轉(zhuǎn)速的方式,還需增加槽輪有效工作長度的可調(diào)性。設(shè)計與排種輪配合的調(diào)節(jié)輪,調(diào)節(jié)輪內(nèi)齒與排種輪型槽結(jié)構(gòu)互補,為便于加工并保證配合面靈活可靠,進一步將型槽截面設(shè)計為類勺型的直角梯形,如圖7所示。此時,梯形槽開口寬度W1為11 mm、下底寬度W2為5 mm、深度h為6 mm,型槽面積為48 mm2。

圖7 型槽截面形狀及尺寸示意圖
2.3.2排種輪直徑、型槽分布角和轉(zhuǎn)速確定
排種輪直徑和排種輪型槽的數(shù)量是影響排種質(zhì)量的重要因素,文獻[24-27]研究表明:排種輪直徑過小,其上均布的型槽數(shù)量少,排種作業(yè)時為保證所需的播量,則需增加排種輪轉(zhuǎn)速,而排種輪轉(zhuǎn)速過大,型槽轉(zhuǎn)經(jīng)充種區(qū)時間變短,種子不能及時充入型槽內(nèi),易造成漏播,因此排種輪直徑應(yīng)取較大值,但排種輪直徑過大,排種器及其附件尺寸增大,與設(shè)計要求相悖。常用的排種輪直徑在60~80 mm之間[24-27]。排種輪直徑應(yīng)滿足排種器布局要求,考慮到飛播裝置的輕量化設(shè)計要求,同時調(diào)整播種行距時需排種單體在無人機腳架與側(cè)2斜管間(間距10 cm)穿梭,參照圖1b,排種器寬度應(yīng)小于該間距,設(shè)計為95 mm。另外,考慮排種器外殼的注塑件厚度(2 mm)以及預(yù)留投種空間24 mm(應(yīng)大于出種口直徑20 mm),排種輪直徑最終取67 mm。
排種輪單位時間供種量和排種輪轉(zhuǎn)速、型槽數(shù)量等結(jié)構(gòu)參數(shù)有關(guān),各參數(shù)之間滿足水稻理論供種公式[26]
(8)
式中Go——單位時間內(nèi)排種輪供種量,g/min
n——排種輪轉(zhuǎn)速,r/min
A——型槽橫截面積,mm2
Z——型槽長度,mm
φ——型槽分布角,(°)
g1——種子千粒質(zhì)量,g
z——單個種子理論平均體積,mm3
k1——種子長度修正系數(shù),江稻501取0.89,黃華占取0.772
a——種子長度,mm
k2——種子寬度修正系數(shù),取1.00
b——種子寬度,mm
k3——種子厚度修正系數(shù),江稻501取0.96,黃華占取0.932
c——種子厚度,mm
式(8)中型槽分布角為相鄰兩型槽中心點間所對應(yīng)的圓心角,對應(yīng)型槽數(shù)量,當型槽截面形狀參數(shù)和寬度一定時,與排種輪轉(zhuǎn)速一起決定排種輪供種量及排種器排量。
而根據(jù)農(nóng)藝上的作物密度要求,排種器單位時間排量與無人機作業(yè)速度、作物播種行距和播量之間滿足
(9)
式中s——排種器單位時間排量,g/min
S——作物播量,kg/hm2
l——作物播種行距,cm
v——無人機作業(yè)速度,m/s
按照前述典型水稻品種江稻501和黃華占的常用播量60~105 kg/hm2(常規(guī)稻)[28-29],當無人機作業(yè)速度為5 m/s時,根據(jù)式(9)計算得到排種器單位時間排量s為540~945 g/min。再將該排量當成供種量,查表2兩種典型品種水稻三軸尺寸(對應(yīng)式(8)中的a、b、c),并將型槽截面積(48 mm2)和排種電機轉(zhuǎn)速50 r/min(所選驅(qū)動電機額定轉(zhuǎn)速66 r/min,30 r/min以上可以提供較為穩(wěn)定的扭矩輸出,取值為額定值80%左右)等代入式(8)中,計算得到滿足江稻 501播量時的排種輪型槽分布角為18.7°~32.5°,滿足黃華占播量時的排種輪型槽分布角為21.4°~37.5°。型槽分布角小于理論計算范圍時,型槽數(shù)量越多,越能滿足排量要求。而當型槽分布角小于14°時,型槽間會出現(xiàn)干涉(小于型槽開口對應(yīng)的圓心角14°)。為保證排種輪結(jié)構(gòu)完整性,同時綜合考慮其結(jié)構(gòu)強度,確定型槽分布角為20°,對應(yīng)排種輪上型槽數(shù)量為18。
2.4 導(dǎo)種管折疊裝置設(shè)計
2.4.1導(dǎo)種管折疊裝置結(jié)構(gòu)與工作原理
為實現(xiàn)種子落地成條,需盡量減少種子在下落過程中受到的氣流擾動,故在條播裝置上設(shè)計導(dǎo)種投種管。為實現(xiàn)導(dǎo)種投種管在無人機作業(yè)前后的折疊,以保證無人機安全起降,條播裝置設(shè)計有導(dǎo)種管折疊裝置,結(jié)構(gòu)如圖8所示。
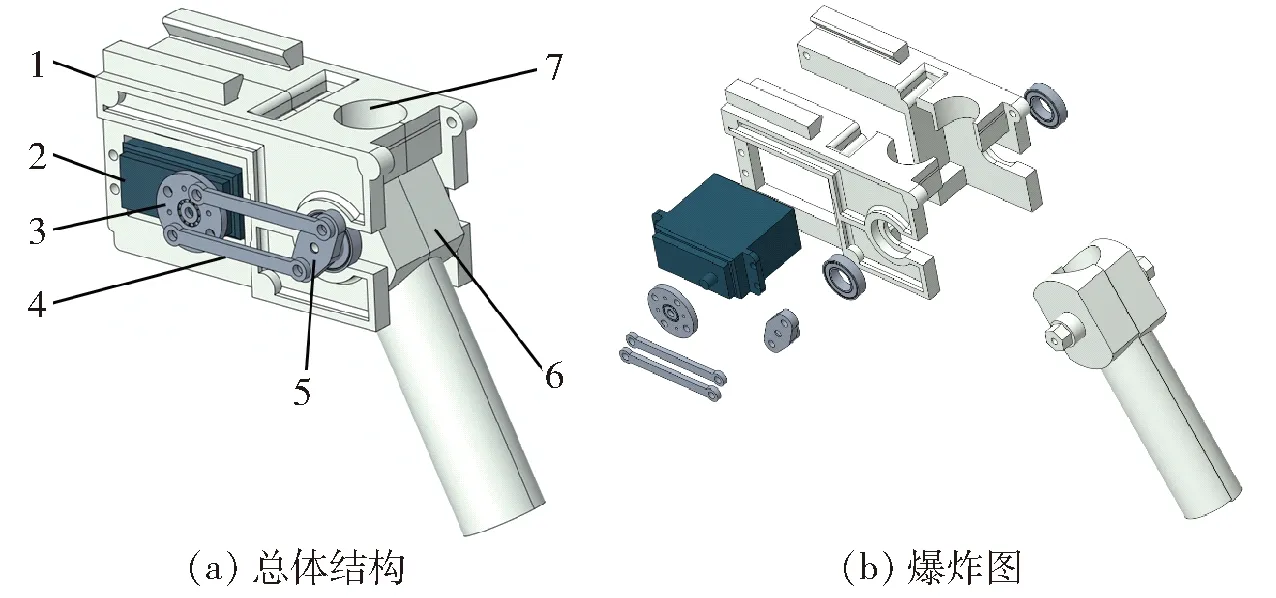
圖8 導(dǎo)種管折疊裝置結(jié)構(gòu)示意圖
工作時,舵機通過連桿驅(qū)動中空旋轉(zhuǎn)頭轉(zhuǎn)動,旋轉(zhuǎn)頭下方連接導(dǎo)種投種管。無人機在地面時,舵機驅(qū)動旋轉(zhuǎn)頭及導(dǎo)種投種管至水平狀態(tài)。在無人機起飛進入工作航線時,舵機驅(qū)動旋轉(zhuǎn)頭及導(dǎo)種投種管至豎直狀態(tài)。
2.4.2導(dǎo)種管參數(shù)設(shè)計
無人機作業(yè)速度較快,為確保飛行安全,設(shè)置的作業(yè)高度應(yīng)大于1 m。而飛行中下方旋翼下洗氣流、地面上洗氣流和無人機飛行迎面來流的混合氣流場會影響種子下落運動的軌跡[21,32]。因此設(shè)計導(dǎo)種管以保證種子下落過程中軌跡的相對穩(wěn)定性,并通過導(dǎo)種管驅(qū)動裝置實現(xiàn)導(dǎo)種管自動展開與折疊。
導(dǎo)種管直徑應(yīng)保證種子順利下落,同時滿足導(dǎo)種管折疊裝置布局需求。參照進種口設(shè)計依據(jù),管徑應(yīng)至少大于1.4倍種子最大長度,綜合考慮導(dǎo)種管折疊裝置布局,最終確定導(dǎo)種管直徑為20 mm,如圖9所示。
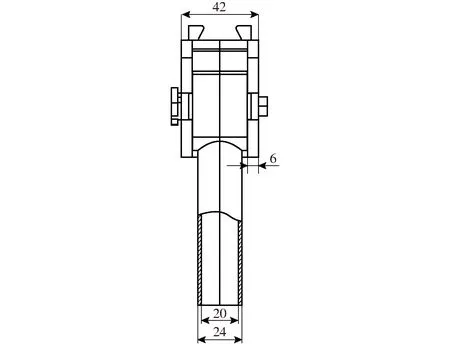
圖9 導(dǎo)種管布局及尺寸(正視圖)
為確定導(dǎo)種管長度,采用ANSYS有限元模擬仿真方法分析六旋翼條播無人機下方氣流場。基于可壓縮雷諾平均N-S方程,結(jié)合SSTk-ω湍流模型和滑移網(wǎng)格技術(shù),建立六旋翼無人機在飛行高度1、1.5 m(無人機腳架離地高度),飛行速度3 m/s時下洗氣流的三維CFD(Computational fluid dynamic)模型,分析六旋翼無人機下洗氣流的分布規(guī)律。
由圖10可知,六旋翼無人機在飛行過程中,混合氣流沿飛行速度方向向后偏移。在飛行高度1 m時,六旋翼無人機機身中心正下方混合流在y=-0.75 m左右出現(xiàn)偏移;在飛行高度1.5 m時,六旋翼無人機機身中心正下方混合流在y=-1.00 m左右出現(xiàn)偏移。成條飛播裝置安裝于六旋翼無人機中心正下方且排種單體長度(不包括導(dǎo)種管)為0.5 m左右,因此導(dǎo)種管延伸長度必須避開混合流影響區(qū),才能保證種子下落不受混合流干擾,此時導(dǎo)種管長度應(yīng)不小于 0.5 m。綜合考慮導(dǎo)種管折疊過程中的阻力對驅(qū)動電機的影響,確定導(dǎo)種管長度為 0.5 m。

圖10 六旋翼無人機旋翼氣流場分布
3 試驗
3.1 排種性能臺架試驗
為測定排種性能、優(yōu)化作業(yè)參數(shù)和驗證作業(yè)效果,分別開展臺架試驗、場地試驗和田間試驗。
3.1.1試驗指標
參照文獻[30]中指定的方法和指標,以總排量變異系數(shù)CVT、各行排量一致性變異系數(shù)CVR和破損率K作為試驗指標,進行排種性能試驗,各試驗指標計算式為
(10)
其中
(11)
(12)
其中
(13)
(14)
式中x——單位時間總排量均值,g/min
xi——第i次單位時間總排量,g/min
y——平均行排量,g/min
yj——第j行排量,g/min
mi——第i次試驗中破損種粒質(zhì)量,g
m1——單次試驗總排量,g
3.1.2試驗方法
如圖11所示,將無人機固定在臺架上,使用網(wǎng)袋收集各排種器單位時間(1 min)排出的種子并稱量。
使用華油雜62和黃華占進行排種性能試驗。設(shè)置3個符合實際作業(yè)播量的參數(shù)(排種輪轉(zhuǎn)速40 r/min,對應(yīng)遙控器通道開度85%,排種輪開度83%、70%、53%)進行水稻試驗,1個參數(shù)(排種輪轉(zhuǎn)速25 r/min,對應(yīng)遙控器通道開度40%,排種輪開度16%)進行油菜試驗。分別對應(yīng)工作速度4 m/s時水稻播量60、45、22.5 kg/hm2,油菜播量6.75 kg/hm2。分別記錄3輪各行1 min內(nèi)排量、各輪總排量及各輪破損種子數(shù),并進行分析。
3.1.3試驗數(shù)據(jù)及分析
文獻[30]中條播排種器性能規(guī)定水稻條播指標:各行排量一致性變異系數(shù)小于等于5%,總排量變異系數(shù)小于等于2.6%,破損率小于等于0.5%;文獻[31]對油菜條播性能規(guī)定指標:各行排量一致性變異系數(shù)小于等于7%,總排量變異系數(shù)小于等于45%。由表3可知,在各排量情況下,水稻和油菜總排量變異系數(shù)、各行一致性變異系數(shù)和破損率指標均能滿足要求,故條播裝置排種器設(shè)計滿足實際應(yīng)用要求。
3.2 作業(yè)參數(shù)優(yōu)化場地試驗
在進行實際大田試驗前,需確定無人機飛行作業(yè)參數(shù)與種子成條性之間的關(guān)系,以便得到較好的播種效果。已知無人機作業(yè)參數(shù)為飛行高度H1和飛行速度v,設(shè)計雙因素試驗確定條播無人機飛行作業(yè)參數(shù)。
3.2.1試驗方案
農(nóng)用無人機作業(yè)速度一般在2~7 m/s之間,飛行高度在1~5 m之間。為保證作業(yè)效率和播種成條性,初步確定試驗參數(shù)為:作業(yè)高度H1(無人機腳架距地面高度)為1、1.5、2 m;飛行速度v為2、3、4、5 m/s;無人機作業(yè)時排種器排量采用式(8)計算結(jié)果進行匹配。
試驗場地為華中農(nóng)業(yè)大學(xué)農(nóng)機駕駛場地,場地空曠且無障礙物。試驗當天有2~3級西北風(fēng),空氣相對濕度36%。以東西走向場地為無人機航向,飛行距離20 m。在無人機航線中心位置設(shè)置兩長形泥盒,泥盒總寬度3 m,可覆蓋無人機2 m最大播幅。無人機依照各參數(shù)依次飛過泥盒,測量泥盒中各行種子條帶的寬度,如圖12所示。
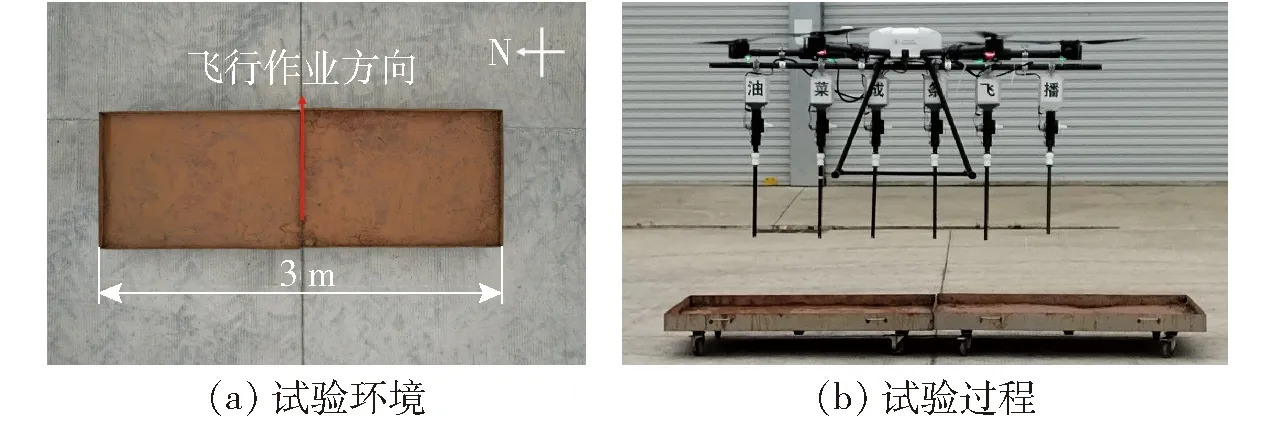
圖12 無人機條播場地試驗示意圖
3.2.2試驗指標
為評價種子落地后的成條效果,定義成條指數(shù)CL,計算公式為
(15)
wo——作物種植行距,即相鄰?fù)斗N管的軸線間距,cm
成條指數(shù)反映種子落地后分布的線性效果,其值越小,種子成條效果越好。
3.2.3試驗結(jié)果分析
分別對水稻和油菜進行雙因素泥盒試驗。如圖13所示,分別測量泥盒中各行種子條帶最寬處寬度(紅框所示),得到各作業(yè)參數(shù)下種子平均條帶寬度如表4所示(試驗時,飛行高度1 m,導(dǎo)種管末端距離泥面40 cm左右,飛行速度3 m/s)。
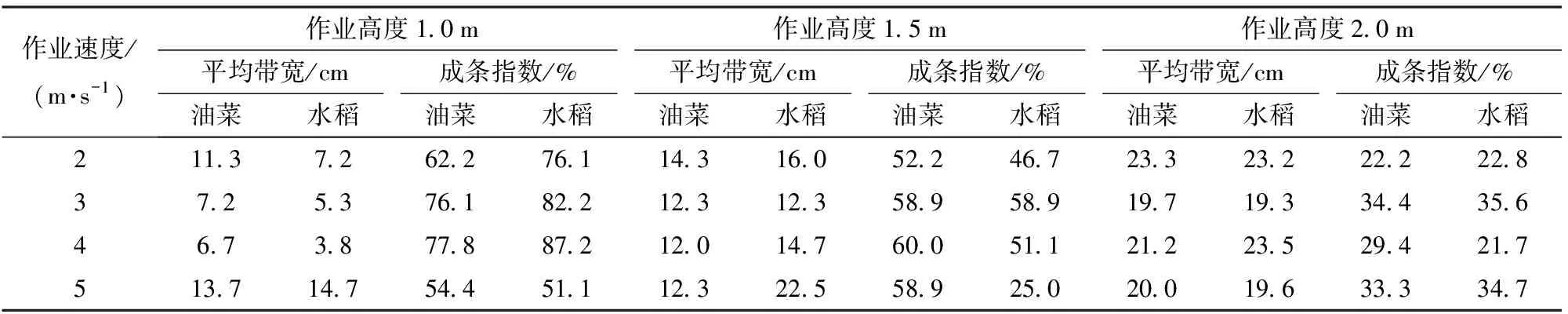
表4 條播無人機作業(yè)參數(shù)雙因素試驗結(jié)果
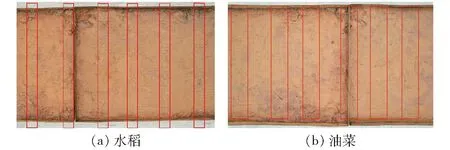
圖13 泥盒試驗效果
由表4可知,飛播種子落地后成條性能與飛行作業(yè)參數(shù)密切相關(guān),且相同作業(yè)參數(shù)下水稻成條性比油菜更好。成條性與作業(yè)飛行高度負相關(guān),無人機作業(yè)飛行高度越低,種子成條性越好;成條性還隨著無人機飛行作業(yè)速度的增加而先增加后降低,并在飛行作業(yè)速度4 m/s左右達到較好的成條效果。
排種器排出的種子在導(dǎo)種管中自由下落后繼續(xù)向下投種,最終的落地成條效果取決于2個效應(yīng)的綜合:氣流場對投種下落過程中種子的擾動效應(yīng)導(dǎo)
致種子的橫向移動,種子落地時與地面碰撞后的反彈效應(yīng)導(dǎo)致的橫向移動。試驗中采用的泥面,可忽略反彈效應(yīng),因此試驗結(jié)果中成條效果隨飛行作業(yè)速度增加而先增加后降低的原因應(yīng)該是由無人機下方氣流場引起的。根據(jù)2.4節(jié)氣流場仿真及相關(guān)研究[21,23,32-33]可知,無人機平臺下方有一個非常復(fù)雜的混合氣流場。作業(yè)前飛時,無人機機頭具有一定的前傾角,旋翼產(chǎn)生向下同時略向后傾的高速氣流,該氣流裹挾周邊空氣并與前方相對來流混合后向后向下移動。隨著飛行速度的增大,旋翼轉(zhuǎn)速及旋翼氣流和前方來流強度都會增加,但是混合流對種子下落過程中的速度及位置的擾動是一個極其復(fù)雜的非穩(wěn)態(tài)過程。定量的研究需要借助EDEM 和 Fluent 耦合仿真方法進行大量仿真,由于既是動網(wǎng)格又是非結(jié)構(gòu)化網(wǎng)格,且計算區(qū)域龐大,模擬計算量及耗時巨大,需要后續(xù)進一步深入相關(guān)研究并合理解釋試驗結(jié)果。
3.3 田間驗證試驗
場地泥盒試驗結(jié)果顯示,條播無人機在飛行高度1 m、飛行速度4 m/s時油菜和水稻達到較好的作業(yè)效果,因此采用此作業(yè)參數(shù)進行實際田間試驗驗證。作業(yè)時排種器調(diào)節(jié)參數(shù)按照播量要求和作業(yè)速度,參照表5進行設(shè)定。
2021年10月11日,在湖北省黃岡市團風(fēng)縣開展油菜條播田間試驗,前茬作物為水稻,試驗前旋耕、開溝。飛播油菜品種為中油雜92,作業(yè)飛行高度1 m,飛行速度4 m/s,播量6.75 kg/hm2。播后30 d后出苗效果如圖14所示。

圖14 油菜條播作業(yè)過程及田間出苗效果
2022年5月11日,在湖北省孝感市開展水稻條播田間試驗,試驗前打漿平整,無明水。水稻品種為甬優(yōu)1540(提前浸種但未破胸露白,晾干后用適量厭食劑拌種、保持無黏連狀態(tài)),作業(yè)飛行高度1 m,飛行速度4 m/s,播量30 kg/hm2。播后30 d后出苗效果如圖15所示。

圖15 水稻條播作業(yè)過程及田間出苗效果
4 結(jié)論
(1)對排種器充種過程進行理論分析,針對充種過程中產(chǎn)生阻力的主要原因,設(shè)計擋種板和減阻斜面,以減小排種過程阻力。通過進一步設(shè)計計算,確定排種輪結(jié)構(gòu)參數(shù):排種輪直徑67 mm、型槽截面形狀為直角梯形、型槽數(shù)量18。
(2)為保證種子下落軌跡穩(wěn)定,分析了六旋翼無人機作業(yè)時機身下方氣流場分布,根據(jù)流場分布規(guī)律確定導(dǎo)種管長度為50 cm,并設(shè)計導(dǎo)種管折疊裝置實現(xiàn)導(dǎo)種管的自動展開與折疊。
(3)進行排種性能試驗,得到在符合3組水稻及1組油菜播量參數(shù)條件下,各行排量一致性變異系數(shù)、總排量穩(wěn)定性變異系數(shù)和種子籽粒破損率,均滿足NY/T 3881—2021《遙控飛行播種機 質(zhì)量評價技術(shù)規(guī)范》指標要求。
(4)進行場地泥盒試驗,確定條播無人機在飛行高度(腳架距地面高度)1 m、飛行速度4 m/s時,成條效果較好(水稻平均帶寬3.8 cm,油菜平均帶寬6.7 cm)。將場地試驗得到的無人機作業(yè)參數(shù)應(yīng)用于油菜和水稻飛播田間試驗中,試驗結(jié)果符合作物實際栽培要求。
猜你喜歡
小主人報(2022年1期)2022-08-10 08:28:44
新作文·小學(xué)低年級版(2021年9期)2021-11-27 07:57:46
學(xué)生天地(2020年17期)2020-08-25 09:28:54
作文成功之路·小學(xué)版(2020年7期)2020-08-24 08:19:30
少年博覽·初中版(2020年6期)2020-06-12 11:42:23
作文成功之路·小學(xué)版(2020年7期)2020-01-02 10:10:44
趣味(數(shù)學(xué))(2018年12期)2018-12-29 11:24:10
小學(xué)生作文(中高年級適用)(2017年10期)2017-11-13 06:01:00
能源(2016年2期)2016-12-01 05:10:46
故事大王(2016年7期)2016-09-22 17:30:08
