面向跨水空介質通信的雷達水表面聲波提取
2023-09-14 01:00:18符曉磊夏偉杰董詩琦
聲學技術 2023年4期
符曉磊,夏偉杰,董詩琦
(南京航空航天大學電子信息工程學院,江蘇南京 211106)
0 引 言
隨著技術的進步和對資源需求的快速增長,人們將目光投向了廣闊的大海,對海洋的勘探活動日益增多。海洋不僅僅蘊藏著重要的物質資源,同樣也是我國重要的戰略資源,現代戰爭是科技戰、信息戰,擁有尖端的海洋軍事科技往往可以掌握作戰的主導權。如何快速靈活有效地進行跨水空介質通信對于海洋資源的勘探和海上作戰都非常重要。
水下通信網絡都面臨著同一個問題:無法直接地跨水空介質通信。這是因為目前主流的無線信號載體在水空介質中傳播特性差異很大[1],例如電磁波由于海水較高的傳導損耗在水中迅速衰減,而聲波入射水空界面后幾乎全部的能量都被反射回水中。因此水聲技術仍然是實現水下目標探測、水下航器通信的主流技術手段[2-3]。如今較為先進的水空通信網絡依賴于自主式水下航行器潛入水下采集數據再浮上水面發送數據[4],整個過程耗時長、成本高,且隱蔽性差,存在軍事應用方面的安全隱患[5]。在水面部署中繼器也是一種常見的方法[6],但其部署位置相對固定,靈活性較差。有學者還提出了基于藍綠光的水下通信[7],藍綠光在海水中衰減較小,最大穿透度為600 m,為實現高速率通信提供了可能,但光在水中的傳輸環境復雜惡劣且需要高精度對準,同時海面的波動會使光束產生擴散和偏移,引起光信號的能量衰減甚至通信中斷。
當水下聲源產生的聲信號傳播到水空邊界時,水表面將產生沿水面橫向傳播的微幅波,該波動攜帶著水下聲源的頻率信息,很多學者稱其為水表面聲波(Water Surface Acoustic Wave,WSAW)[8]。由于WSAW的振幅很小,無法通過常規的方法提取,有學者提出了水表面聲波的激光相干探測[9-10],同時激光能量密度很高,照射水面將產生激光聲[11],為水空的下行通信鏈路提供了一種新思路。麻省理工學院實驗室首次提出了一種跨介質通信系統[12],采用雷達提取WSAW信號以實現跨介質通信。
本文提出了一種基于級聯成像調頻連續波(Fre‐quency Modulated Continuous Wave,FMCW)雷達提取WASW 信號的新方法,利用FMCW 雷達[13]獲得水表面波信息,再通過相關的信號處理提取出攜帶聲源信息的WSAW 信號并結合匹配濾波技術提高輸出信噪比[14]。在該方法中,信號仍是以聲信號的形式抵達水面,能量損失相對其他形式的信號小;再通過雷達以非接觸的方式探測水面微幅波的信息,解決了隱蔽性差的問題,也避免了藍綠光需要高精度對準的問題,雷達只需要位于被聲源激勵的水面上方即可提取蘊含水下聲源信息的WSAW 信號。由于WSAW 相對于水面自然擾動十分微弱,基于FMCW 雷達的WSAW 的提取非常具有挑戰性。考慮到其在軍事上的應用,這也是一項非常具有研究價值的工作。
1 基于FMCW 雷達的WSAW 信號提取原理
當水下聲源產生的聲波傳播到水空邊界時,由于空氣相對于水來說是一種絕對軟介質,水表面將產生與聲波頻率一致的振動,我們稱其為水表面聲波(WSAW)。雷達目標通常在主體運動的同時還伴隨著部分感興趣目標的微動,例如導彈的進動、直升機螺旋槳的轉動、發動機的振動、人體的肢體擺動及呼吸心跳等[15-17],這些微小運動會對雷達回波產生相位調制,使得目標主體運動產生的多普勒頻率發生一定的頻偏,這種效應稱為微多普勒效應。水表面波由WSAW 和自然擾動兩部分構成,也是一種微動信號。本文考慮的自然擾動為厘米級,幅度相對其他微動較小,所以主要考慮水表面波對雷達回波的相位調制。雷達提取水表面聲波系統的示意圖如圖1所示。
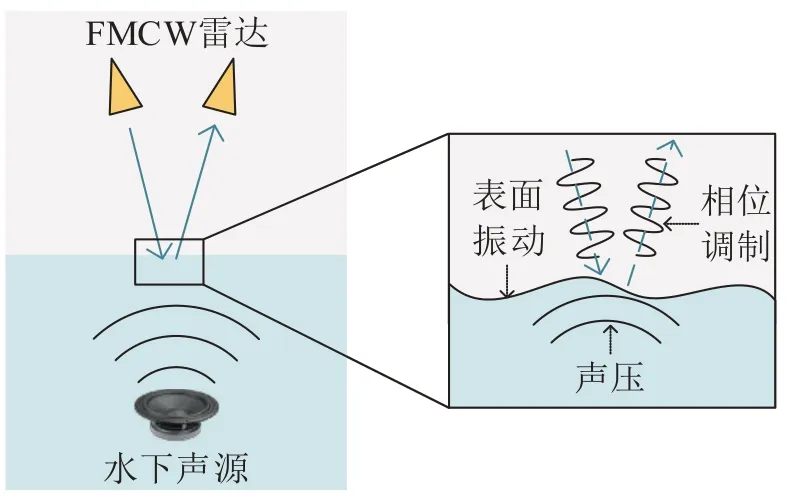
圖1 雷達提取水表面聲波系統示意圖Fig.1 Schematic diagram of radar system for extracting WSAW
WSAW 信號包含在雷達回波的相位信息中,如何提取和處理并檢測蘊含著水下聲源信息的WSAW 信號是本文的重點。圖2 為基于FMCW 雷達的WSAW 信號提取處理流程圖。本節主要討論了水面相對平靜時的WSAW 信號的提取原理,考慮將多通道中頻信號sn處理為多角度原始相位?Bm,由于水面擾動較小,中央波束對應的原始相位經帶通濾波即可獲得有效的WSAW信號。
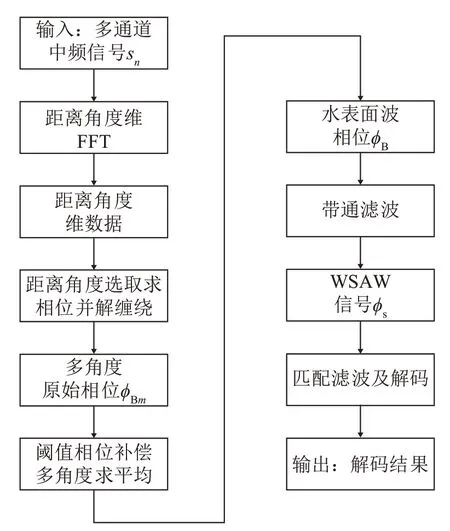
圖2 WSAW信號提取處理流程圖Fig.2 Flow chart of WSAW signal extraction
1.1 水下聲源激勵水表面聲波的理論模型
聲波傳播到水空邊界時將發生反射與折射的現象,滿足聲壓連續性條件,即:
式中:pi(r,t)為入射聲壓,pr(r,t)為反射聲壓,pt(r,t)為透射聲壓。水空邊界的聲反射系數R和折射系數D為
式中:ρ1c1為水介質的聲阻抗,ρ2c2為空氣介質的聲阻抗,分別約為1.56×106kg·(m2s)-1,404.5 kg·(m2s)-1。考慮聲波垂直入射水面的情況,由式(2)可知,透射到空氣中的聲波非常微弱,可以忽略不計,入射聲壓pi近似等于反射聲壓pr。利用聲阻抗的定義公式并結合入射聲壓和反射聲壓的關系,可得該處質點的運動速度的大小vs:
設質點的角頻率為ωs,則可推導[9]出該質點的振動幅度As為
由式(4)可以看出,振動幅度與入射聲壓成正比,與質點振動頻率成反比。文獻[8]中的研究表明:水下聲源激勵的WSAW 中僅有與聲源頻率一致的波動才會有顯著振幅,所以WSAW 將攜帶水下聲源的相關信息,為后續的雷達提取水面微動信號提供理論基礎。由于聲波引起的質點振幅相對其波長極小,可以用線性小振幅波理論來進行建模研究,根據該理論的相關推導[9],水表面聲波的二維波幅方程為
式中:x為水面切向坐標,ks為水表面波的波數,ωs為水表面波的角頻率。水表面聲波的恢復力主要由表面張力和重力構成[9],其波長的色散關系可表示為
式中:σ為水的表面張力,g為重力加速度。由于水介質的黏滯性,隨著距離的傳播,水表面聲波的幅度也會逐漸衰減。
在很多雷達系統中,通過發射如式(7)所示的線性調頻信號,使得回波在經過脈沖壓縮后有更高的增益。同樣的,水下聲源也可以采取以上方案,以獲得更高的增益,使信號更容易被檢測。所以將水下聲源的發射信號SaT(t)進行如下調制:
式中:fs0為起始頻率,μs為調頻斜率,Ts為信號周期。采用時頻分析[18]的方法可以更精確地分析線性調頻信號,在本文中采用了短時傅里葉變換(Short-Time Fourier Transform,STFT),該變換是在給定信號上加滑動窗并做傅里葉變換以得到信號在不同時刻的頻率信息。STFT的計算公式為
式中:s為信號,g為窗函數,*表示共軛。
水表面波包含自然擾動和WSAW 兩部分。由于式(4)以及水介質黏滯性導致的橫向衰減,聲源引起的質點振幅As(t)將會隨著線性調頻信號頻率的升高而減小;假設自然擾動的頻率為fn,振幅為An,則水表面波R(t)表達式為
式中:?s、?n分別為WSAW 與自然擾動的初始相位。根據式(4),由于聲源功率限制,WSAW 的振幅通常無法達到厘米級,同時受限于雷達測距的精度(1 μm),在實驗中控制聲源功率和聲源到水面的距離,保證WSAW的幅度在微米量級。
水下目標噪聲譜通常是比較復雜的,在提取WSAW 信號時避免其干擾非常重要。由于水下目標噪聲在水面產生的聲壓遠小于實驗中的水下聲源產生的聲壓,如文獻[9]中列舉的某型常規動力潛艇在高航速的條件下引起的水面微幅波中心幅度僅為63 nm,所以一般的水下目標噪聲在水面引起的振動對WSAW 信號的干擾可以忽略。此外,由于WSAW 幅度極小,且與幅度相差千倍的自然擾動疊加,雖然兩者頻率相差較大,可以通過頻域濾波分離,但常規手段無法有效提取WSAW。本文提出了一種基于FMCW雷達的水面微動提取方法。
1.2 FMCW雷達微動信號提取
FMCW 雷達通過發射連續線性調頻信號來感知目標的位置信息。FMCW 雷達微動信號提取本質上是對含有目標距離信息的差拍信號進行頻率與初始相位的估計。
FMCW雷達的發射接收信號如圖3所示。圖3中,fmin=f0-(B/2)是起始頻率,T是調頻周期,f0是中心頻率,B是調頻帶寬,調頻斜率μ=B/T,τ為接收信號延時。發射信號ST(t)的表達式為
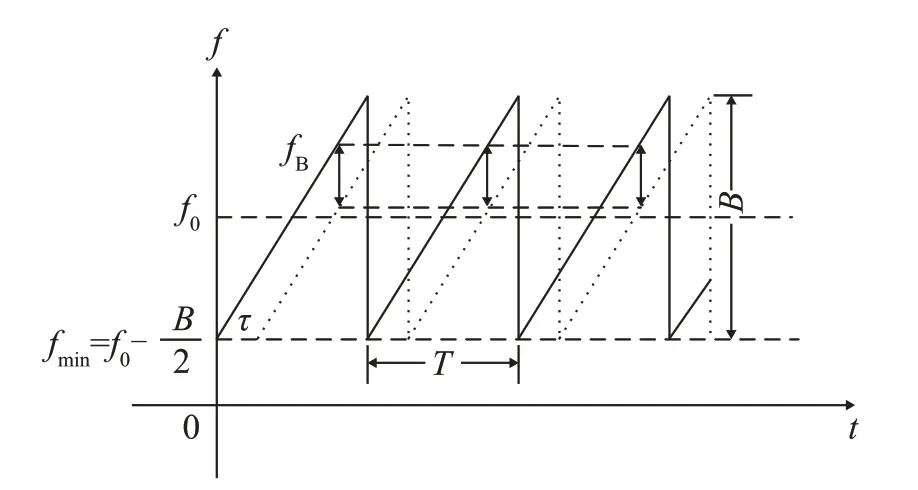
圖3 線性調頻信號參數圖Fig.3 Parameter illustration of a linear FM signal
接收信號經過混頻,濾除高頻分量并忽略相關小量可以得到基帶差拍信號sB(t):
式中:fB為與距離相關的差頻,?B為差拍信號的初始相位,R表示目標距離。
以下圖4~16 中的信號處理相關的結果均是實測數據處理所得。如圖4所示,差拍信號為距離相關的單頻信號,對其做距離維FFT,圖中的黃線即為水面所在距離門。由此可知水面到雷達的距離為1.42 m,WSAW的振動信息包含在此距離門的相位?B(t)中,令R=R0+R(t),將式(9)代入,則?B(t)的表達式為

圖4 用于測距的差拍信號FFT結果Fig.4 FFT result of beat signal for ranging
式中:λ為雷達的工作波長,R0為雷達到水面的距離(不含微動信息),?B(t)中包含自然擾動?n(t)和WSAW相位?s(t)兩部分。
由于自然擾動和WSAW的振動幅度相差很大,相差約103的數量級。這就限制了對于FMCW雷達波長的選擇,一方面因為WSAW的幅度為微米級,要使這個量級的振動有效地反映在相位中,雷達波長應該選得更小;同時,相較于厘米級的水面自然擾動,若選擇雷達的波長過小、頻率過大(如THz),將導致相位變化過快,無法有效跟蹤水面位移。因此在雷達提取水表面聲波的系統中,選用了頻率為77 GHz的FMCW雷達,其波長為3.9 mm,相對符合上述要求。自然擾動的振幅An和WSAW的振幅As雖然相差懸殊,但其在頻率上區別明顯,可以通過帶通濾波將WSAW 信號分離出來,進一步分析其頻率特性。
除了幅度相差懸殊,自然擾動還會使回波的雷達散射截面(Radar Cross Section,RCS)劇烈起伏,影響WSAW 信號的提取。所以選用了陣列FMCW雷達進行波束形成[19],對多個相位中心的數據進行聯合相干處理,實現空間上的選擇性接收,即形成天線波束指向所期望的方向。
考慮窄帶平面波入射一維均勻直線陣,示意圖如圖5所示。入射信號形式為sn(t),陣元信號的矢量形式s如式(14)所示:
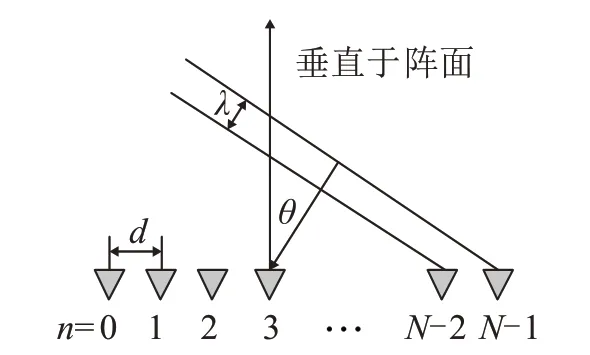
圖5 均勻直線陣示意圖Fig.5 Schematic diagram of a uniform linear array
常規的非自適應波束形成為陣元信號的加權求和,可以通過對sn序列進行FFT 快速實現,求得S(m)的表達式為
式中:m為波束號,M為角度維FFT 的點數,?=dsinθ/λ-m/N,公式后半部分為sinc 函數,m號波束對應波束角度θm,所以S(m)對應的波束指向為?=0 即θm=arcsin[(mλ)/(Nd)]處,該波束求得的相位為?Bm。
FMCW 雷達經過差頻后獲得多通道中頻信號sn,再通過距離-角度維FFT 處理得到水面的距離-角度維數據,各點數據幅值相對于其中的最大值進行歸一化,以下同。選取水面所處距離門中絕對值最大的波束,該波束即為垂直水面的回波方向,我們稱其為中央波束?BM。對應水平擺放的雷達來說,中央波束即是θM=0處。圖6為水平放置FMCW雷達處理得到的距離角度分布圖,雷達擺放稍有傾斜,所以中央波束對應角度為2.2°。
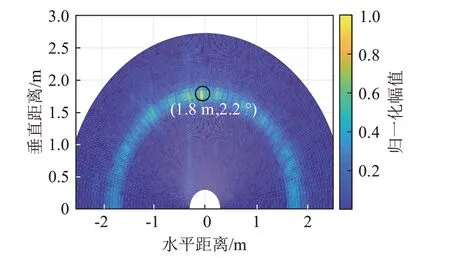
圖6 雷達水平放置時測量的距離角度分布Fig.6 Distance and angle distribution measured when the radar is in horizontal placement
平靜水面的WSAW信號提取結果如圖7所示。在選取合適的距離-角度維數據后,可以采用相位反正切法求解相位,獲得多角度的原始相位?Bm,但該方法求得的相位被限制在[ -π,π]中,導致相位的測量值與實際不同。如圖7(a)所示,若?Bm中的某些值超出這個范圍則會出現相位纏繞的現象,即超出該范圍的值會被加上或減去q×2π,使其落在這個區間內。要恢復出實際值,就需要確定q的值。本文采用一種判斷相鄰采樣點的相位差值大小的方法來進行解纏繞。假設纏繞的相位為?*Bm,相鄰兩個采樣點的真實相位的最大差值小于π,則解纏繞的公式為
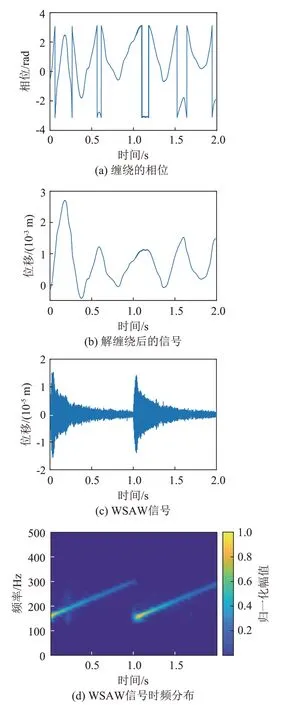
圖7 平靜水面提取的WSAW信號波形及其時頻譜Fig.7 WSAW signal waveform and its spectrogram extracted under calm water surface
式中:n為不小于2 的整數,Δ?m(n)為m號波束角度對應的第n個時間采樣點相位的真實值與測量值的差值,初始值Δ?m(1)為0。所以解纏繞后相位?Bm為
解纏繞的效果如圖7(b)所示,可以觀察到自然擾動的波高約為1.5 mm,解纏繞后的相位如式(12)所示,為WSAW 與自然擾動的疊加,當自然擾動不大時,選取一個角度即中央波束?BM即可獲取有效的原始相位?B。
實驗中聲信號的起始頻率fs0=150 Hz,信號長度T=1 s,調頻斜率μs=150 Hz·s-1,帶寬B=150 Hz,采樣頻率fs=1 840 Hz。WSAW 信號頻率為150~300 Hz,而自然擾動一般來說頻率為0.5~2 Hz,兩者可以通過濾波很好地區分,圖7(c)為濾波后的WSAW 的時域波形,WSAW 信號的平均幅度約為6 μm,圖7(d)為WSAW的時頻分布,各個時間-距離點的幅度相對于其中的最大幅度進行歸一化,以下同。可以明顯看到線性調頻信號在時頻圖上的亮斜線,實驗說明在水面平靜的情況下,使用帶通濾波器能直接分離得到WSAW 信號的?s并通過時頻分析觀察其調頻特性。
利用如圖2中所示的流程圖,在水面相對平靜的環境下,可以使用相對簡單的方法判斷水下聲源信號的有無。但當水面自然擾動較大時,會出現RCS劇烈起伏、相位跳變的問題,第2節將詳細討論該情況下的信號處理方法。
2 基于FMCW 雷達的WSAW 信號處理方法
與水面平靜的情況不同,水面自然擾動過大會造成RCS 劇烈起伏、相位跳變的問題,針對該問題,本文提出了一種多角度積累結合閾值相位補償的方法,從而獲取有效的原始相位?B,并通過濾波分離出WSAW 信號,最后通過匹配濾波和解碼確定水下聲源的狀態。
大幅度自然擾動下的雷達回波信號與微擾情況有一個很大的區別:RCS起伏很大,RCS最小處僅為最大值的0.3%,在厘米級自然擾動下就會出現上述問題。圖8(a)為我們制造的機械擾動的原始相位,可以得出該自然擾動的波高為1.4 cm左右。在圖8(b)中的距離-時間分布上能看到水面所在距離門的信號幅值變化劇烈。在RCS極小值求得的相位是值大于π 的相位加上或減去q×2π,將跳變量限制在[ -π,π]隨機分布的,解纏繞將相鄰時刻跳變絕對在[0,π]內。圖8(c)展示了局部的歸一化RCS 與差分相位的對比,可以看到RCS較小處,求得相位差分的絕對值較大但小于π,符合上述推測。
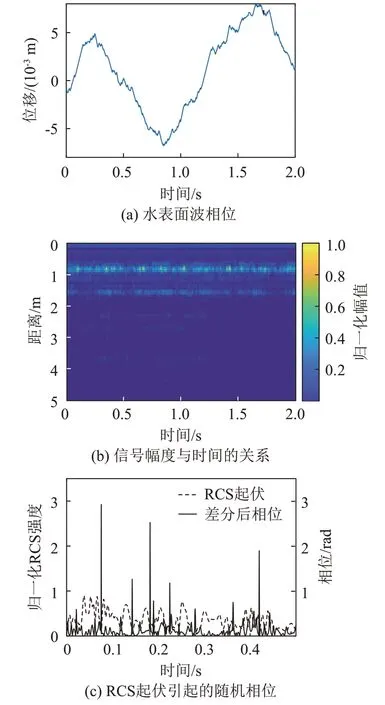
圖8 大幅度自然水面擾動對WSAW信號提取的影響Fig.8 Influence of large-scale natural water disturbance onWSAW signal extraction
由于隨機相位比真實相位變化大得多,?BM經過帶通濾波后真實信號被淹沒,如圖9(a)、9(b)所示,濾波后信號的WSAW 被隨機相位淹沒,時域上存在幅度很大的干擾,所以在其時頻分布中難以辨認線性調頻特性。針對隨機跳變的相位,提出了一種閾值相位補償算法減小其影響,其主要思路是將判定為相位隨機跳變的點修正到與前兩個點的趨勢相同,公式為
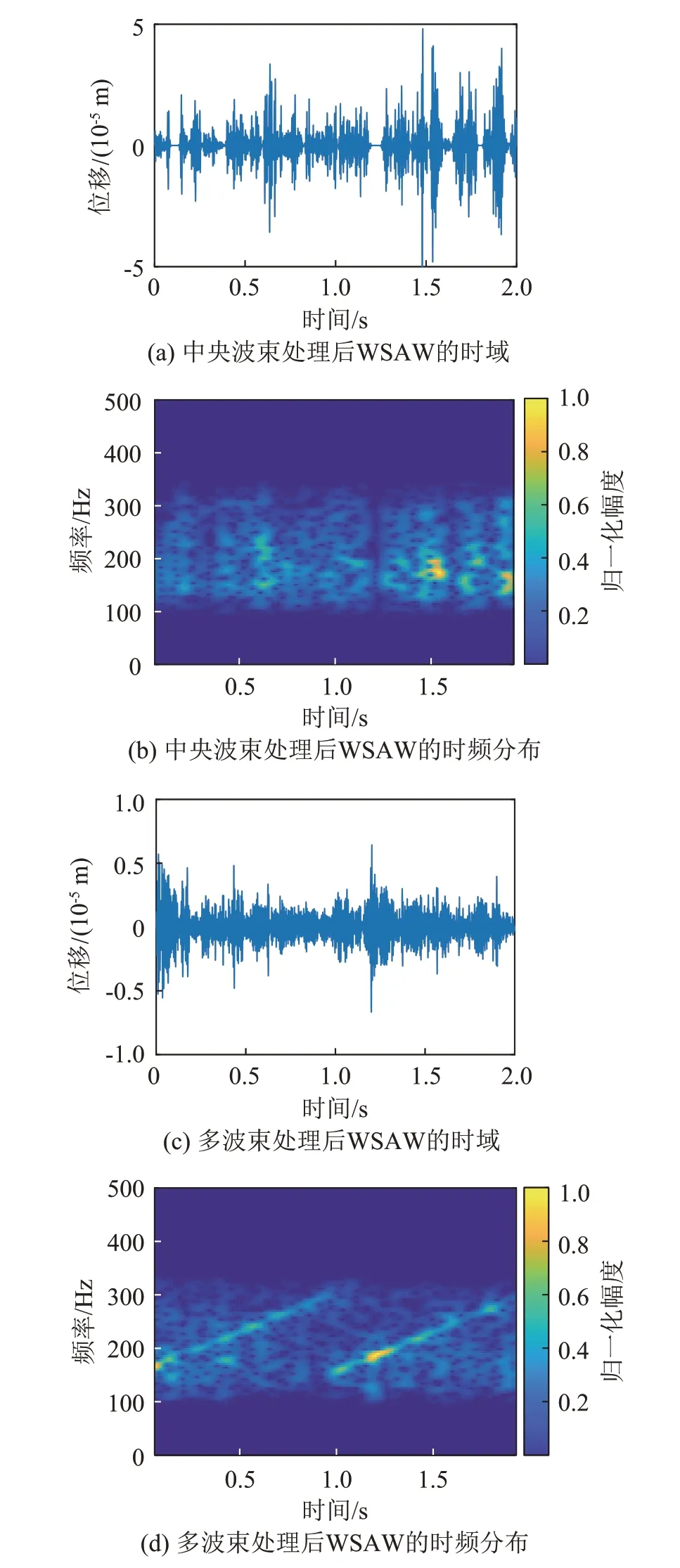
圖9 WSAW信號經多角度積累結合閾值相位補償處理和僅中央波束處理的結果對比Fig.9 Comparison of WSAW signal processing results by multiangle accumulation combined with threshold phase compensation and by only central beam processing
式中:?Bm為m號波束的原始相位,?Δm為相位修正量,?T為判斷相位是否跳變的相位差閾值,通過測試對比將?T設為π/20。將?Δm與?Bm相加即可得到與閾值補償后相位?′Bm:
如圖2流程圖所示,經過1.2節中的距離-角度維FFT與距離門選取、求相位解纏繞操作后,將得到M個角度的原始相位數據?Bm,由于RCS起伏引起的相位隨機跳變問題,需要通過上述的閾值相位補償算法減小其影響,得到補償后相位?′Bm。最后選取中央波束附近2l+1 個波束的相位求平均得到水表面波相位?B,即多角度積累,以提升輸出信噪比(Signal to Noise Ratio,SNR)。假設中央波束對應的相位為?′BMc,水表面波相位?B計算公式為
式中:Mc為中央波束對應波束號。考慮到不同角度對應的水面處,聲信號存在不同的時延,但由于水聲信號頻率較小(小于300 Hz),其波長較長,所以進行多角度積累時如果l取得較小,可以保證所積累的角度對應水面處于同一距離門,同時角度范圍內的聲信號時延導致的相位差可以忽略,各角度處理得到的WSAW 信號的相位一致,積累后可以提高輸出信噪比。經過多角度積累和閾值相位補償后得到有效的水表面波相位?B,再對其進行帶通濾波即可得到WSAW信號?s,如圖9(c)、9(d)所示,時域中相位跳變引起的大幅度干擾信號減弱,從時頻分布中可以清晰看到亮斜線。多角度積累和閾值相位補償實質上是為了降低相位隨機跳變產生的影響,上述對比表明,在較大自然擾動下(幅度為1.5 cm 左右),該算法可以較好地提取WSAW 信號并分析其調頻特性。
線性調頻信號能夠通過線性頻率調制來獲得更大的時寬帶寬積,水下聲源發射信號SaT(t)如式(7)所示,帶寬為B=μsTs,D=BTs被稱為脈寬壓縮比,等于信號的時寬帶寬積。根據脈沖壓縮理論可知,經匹配濾波后信號的輸出信噪比為輸入信噪比的D倍。根據實驗中的聲源參數計算出D=150,脈沖壓縮前后的SNR 增益為21.76 dB。對圖9(b)中的WSAW 相位?s進行匹配濾波,匹配濾波結果如圖10 所示,計算得到輸入信號?s的SNR 為5.23 dB,匹配濾波后輸出SNR 為23.09 dB,SNR 增益為17.85 dB,考慮到?s各頻率幅度不恒定,增益將有所降低,匹配濾波的增益與理論基本相符。圖10中的縱軸歸一化幅度為匹配濾波結果相對其最大輸出幅度進行歸一化所得,以下同。

圖10 WSAW匹配濾波的結果Fig.10 Result of WSAW matched filtering
3 實驗分析與討論
3.1 實驗場景及儀器
實驗采用的級聯成像FMCW 雷達設備是TI 公司的TIDEP-01012,由4片AWR2243級聯設計,支持76~81 GHz 的頻帶范圍。實驗中采用12 發、16收的天線陣列以時分復用的多輸入多輸出(Multiple Input Multiple Output,MIMO)方式構成86個通道一維虛擬天線陣列。水下聲源為UWS-015 水下揚聲器,額定功率為20 W,頻率范圍為80~20 000 Hz。
為了評估上述方法的有效性,在湖邊展開了一系列實驗,實驗場景如圖11(a)所示,級聯成像FMCW雷達位于水面上方1.7 m處,聲源位于距水面0.5 m 的水下。根據式(12)采用雷達測量水面振動,發現由風引起的水面自然擾動幅度在毫米量級,此時的WSAW 信號只需將中央波束的相位經過帶通濾波即可獲得。通過制造機械擾動形成厘米級的波浪,測試該情形下的WSAW 信號提取處理效果。在雷達傾斜測量的實驗中,由于需要控制水面波動幅度穩定,選擇在室內進行實驗測試,實驗場景如圖11(b)所示,聲源放置在水盆中,聲源距水面0.3 m左右,FMCW雷達架設在水面上方0.9 m處,通過相對恒定的風驅動水面以獲得幅度較為穩定的水面波動。
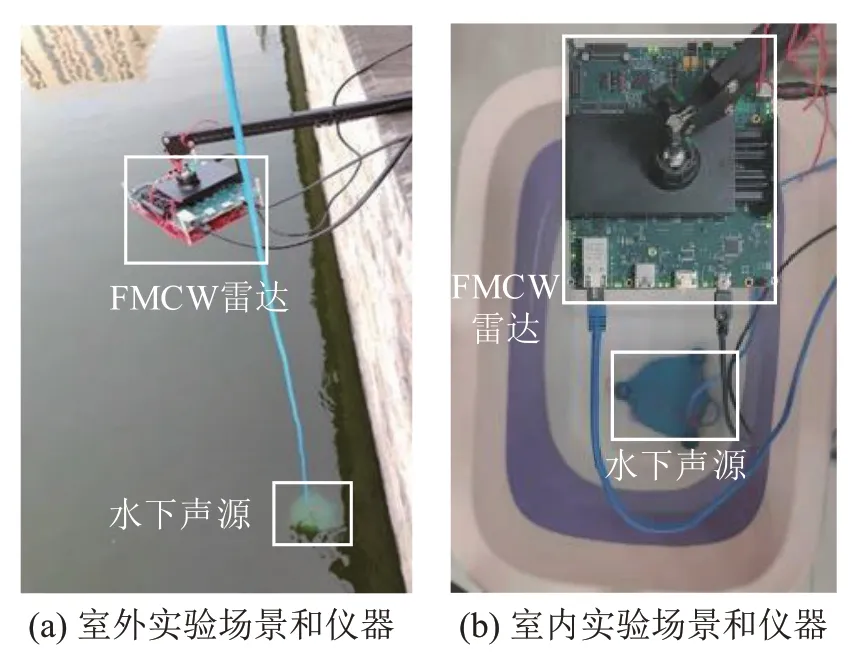
圖11 實驗場景及儀器Fig.11 Experimental scene and instruments
3.2 不同擾動下的實驗結果對比與解碼結果
在FMCW雷達提取WSAW信號的過程中,將不可避免地受到水面自然擾動的影響,由于聲源激勵的WSAW 信號幅度十分微小,不同擾動下處理得到的WSAW信號SNR明顯不同。為了評估自然擾動對通信系統的影響,在湖邊通過機械擺動生成頻率為1~3 Hz 的擾動并控制其擾動波高,提取不同擾動波高時的WSAW 信號并估計其SNR,將得到的實測數據繪制成折線圖,如圖12 所示。實驗結果表明,隨著擾動波高的增大,提取到WSAW信號的SNR 逐漸減小,各幅度擾動下匹配濾波的平均增益為18.1 dB,與2.2節中的增益很接近,相對符合匹配濾波的理論增益。
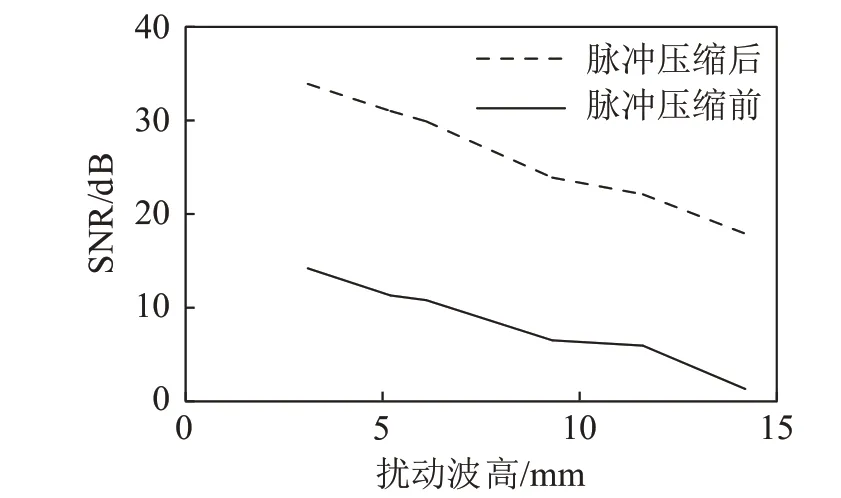
圖12 不同波高下WSAW信號的SNRFig.12 SNRs of WSAW signal at different wave heights
編碼部分采用振幅鍵控(Amplitude Shift Key‐ing,ASK)調制,即水下聲源發送LFM 信號為“1”,不發送信號為“0”,碼字長度為1 s,處理得到WSAW信號的時頻分布如圖13(a)所示,可以比較明顯地看到時頻分布上發送LFM 信號時的亮斜線,從圖13(b)上可以發現匹配濾波后的輸出信噪比更高,可以通過門限設置來判斷信號的有無,從而實現對水下信號的解碼。實驗表明在較大的自然擾動下可以有效地提取出WSAW 信號并實現正確解碼。
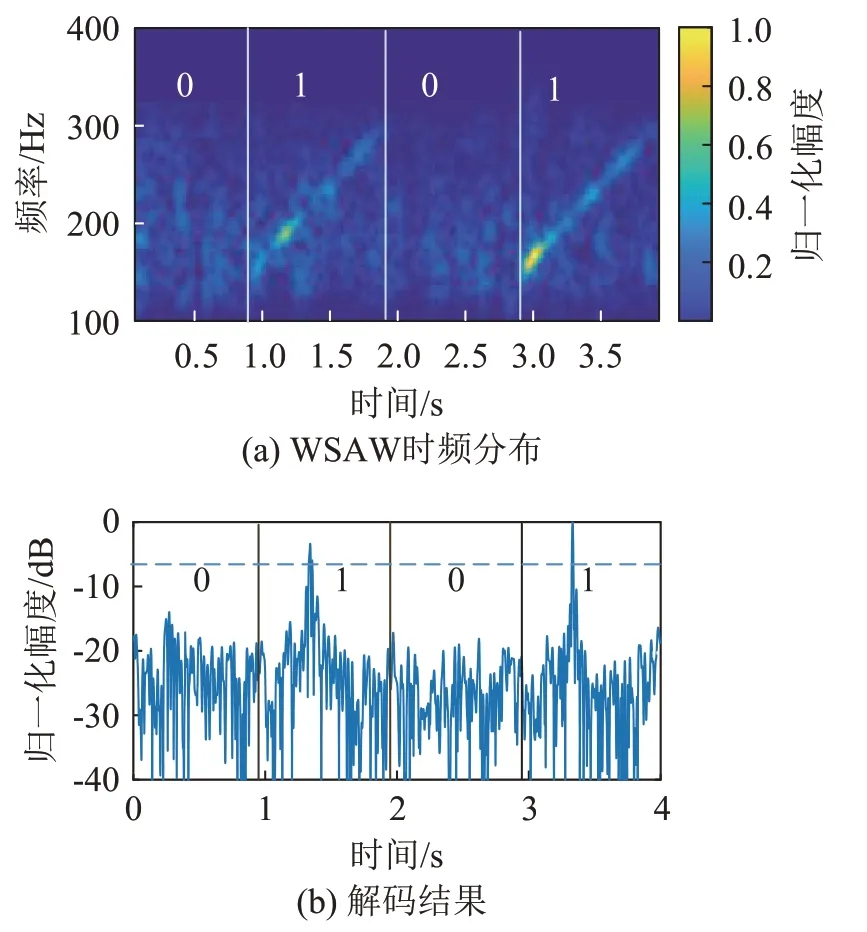
圖13 WSAW信號的時頻分布及其相應的ASK調制解碼結果Fig.13 Spectrogram of WSAW signal and its decoding results of the corresponding ASK modulation
3.3 雷達傾斜情況的實驗結果
對于WSAW信號的提取,文獻[9-10]中提出了基于激光干涉的微弱振動信號提取方法,該方法的測距精度很高,但也存在著一些問題,比如激光需要嚴格垂直水面并對準水下聲源。本文采用的級聯成像FMCW 雷達在與水面呈一定傾角時仍能提取WSAW信號。為了驗證雷達傾斜提取WSAW信號的有效性,將雷達架設于水下聲源的正上方,其相對于水面的傾斜角約為30°和50°。獲得的距離-角度維數據的極坐標形式如圖14所示,圖中的亮點對應水面所處距離角度單元,計算出兩次傾斜的角度分別為31.2°和47.8°,與實際傾斜角度基本相符。
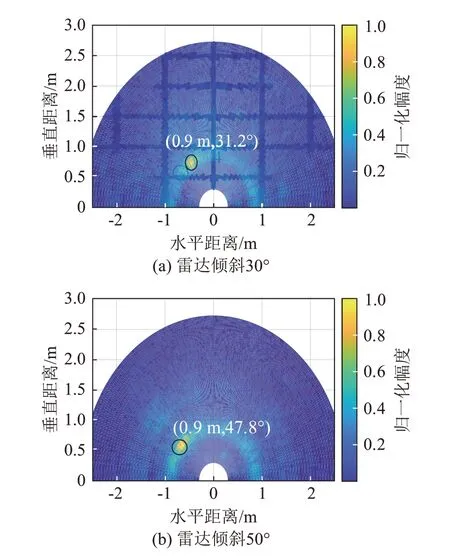
圖14 雷達傾斜測量的WSAW信號的角度距離分布Fig.14 Angle-distance distribution of WSAW signal under radar tilt measurement
對傾斜測得的數據進行處理,結果如圖15 所示。實驗證明:在毫米級的擾動下,雷達傾斜至50°仍能有效地提取WSAW 信號并分析其調頻特性,以此實現水下聲信號的接收。
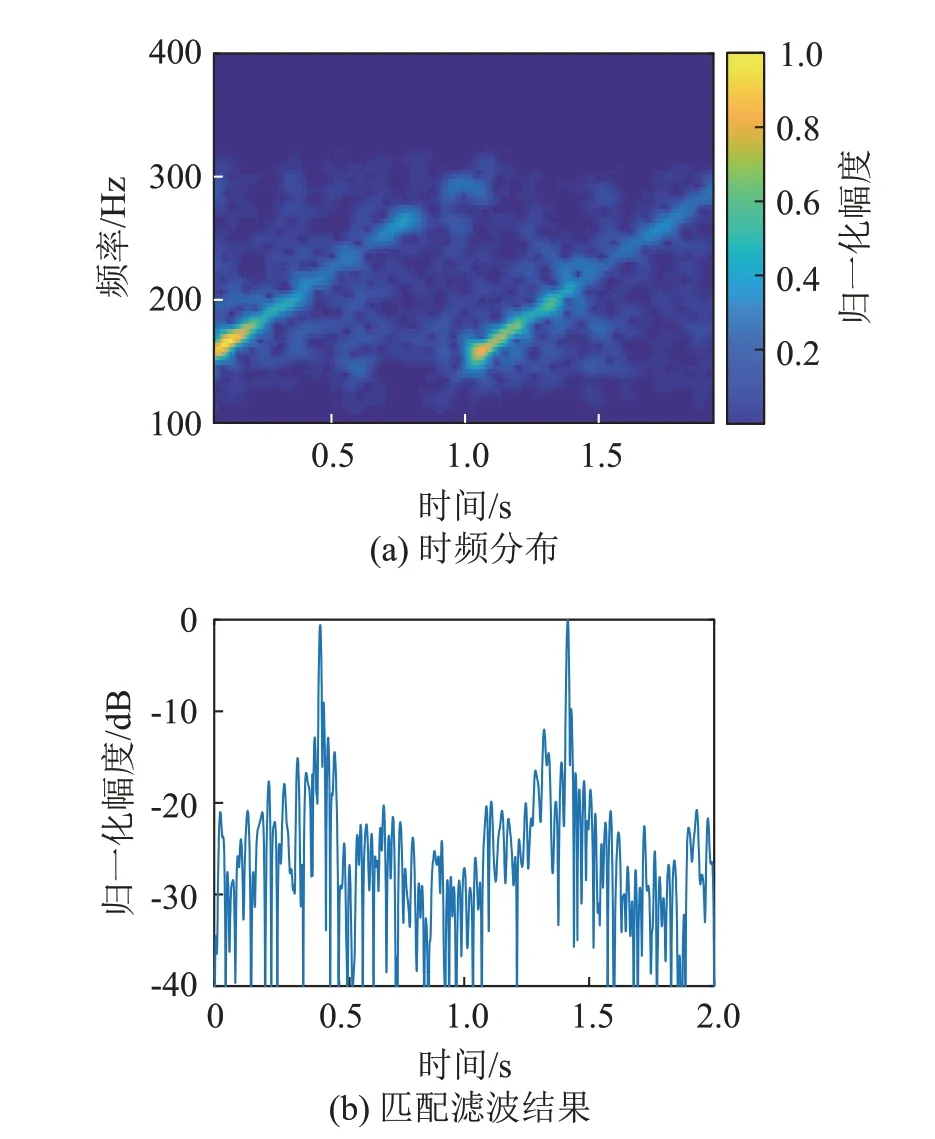
圖15 雷達傾斜測量的WSAW信號處理結果Fig.15 WSAW signal processing results under radar tilt measurement
為了進一步評估雷達傾斜角度對WSAW 信號提取效果的影響,將實驗場景切換到相對無風的室內,通過相對恒定的風(由風扇產生)來驅動水面產生擾動并用雷達測量其幅度,再調整風扇的風速從而控制水面波動幅度在4 mm左右。逐漸增大雷達傾斜角,對比不同角度下處理得到的WSAW 的信噪比,結果如圖16所示。由圖16可以看出,由于實驗過程中每次實驗的水面波動大小難以精確控制,WSAW 的SNR 出現波動,但隨著雷達傾斜角度的增大,WSAW 的SNR 變化并不明顯。由此得出結論,雷達傾斜角度對WSAW 信號提取效果基本沒有影響,推測其原因是在實驗中由于雷達保持在聲源的正上方,僅改變雷達的傾斜角度幾乎不會影響雷達對水面回波的接收效果。
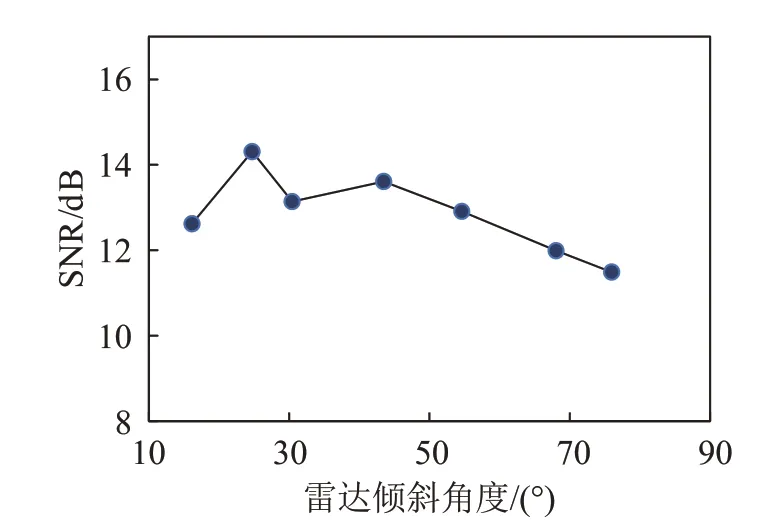
圖16 不同傾斜角度下WSAW信號的SNRFig.16 SNRs of WSAW signal at different radar tilt angles
4 結 論
本文提出了一種基于級聯成像FMCW 雷達的WSAW信號提取處理方法。
針對厘米級的大幅度自然擾動,本文采用了多角度積累結合閾值相位補償的方法,從而減小RCS劇烈起伏造成的影響;水下聲源采用線性調頻信號并結合匹配濾波技術提高信噪比,為在更大、更復雜的水面擾動下通信提供了思路。
本文通過多次實驗比較了不同擾動下的WSAW信號的提取及處理的效果。實驗結果表明,隨著自然擾動波高的增大,提取到WSAW 信號的SNR逐漸降低,在1.5 cm的擾動波高下依然可以有效提取WSAW 信號并進行解碼;同時設計實驗驗證了在毫米級擾動下FMCW 雷達傾斜50°提取WSAW信號的可行性。雖然本文的實驗尺度較小,但通過提高水下聲源的聲源級和方向性可以在保證WSAW 信號幅度不變的情況下增大聲源到水面的距離。
此外,在海洋環境中通常難以達到最大1.5 cm的擾動波高,在本文的基礎上后續可以考慮以下幾個方面以實現更大擾動的跨介質通信:(1)改變水下聲源的調制方式,比如采用抗干擾更強的編碼方式;(2)改進雷達信號處理算法,采用脈沖積累、改進波束形成算法以提高對水面擾動的抗干擾能力;(3)實時統計水面各處的擾動大小并動態調整通信的水空分界位置,以保證在較小的擾動下進行通信。
猜你喜歡
小獼猴智力畫刊(2022年9期)2022-11-04 02:31:42
中學生數理化·中考版(2022年11期)2022-02-16 07:01:20
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
小哥白尼(趣味科學)(2019年6期)2019-10-10 01:01:50
中國生殖健康(2019年3期)2019-02-01 06:12:26
發明與創新(2016年38期)2016-08-22 03:02:52
太空探索(2016年5期)2016-07-12 15:17:55
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
海軍航空大學學報(2015年3期)2015-11-11 17:20:00