曲線路段平行式加速車道漸變段合理長度研究
2023-09-09 02:13:32潘兵宏張冉陽
重慶交通大學學報(自然科學版) 2023年7期
潘兵宏,張冉陽,李 翔,柴 虎,劉 娟
(長安大學 公路學院,陜西 西安 710064)
0 引 言
高速公路合流區(qū)因其復雜的交通環(huán)境,是交通事故的高風險路段。確保合流區(qū)各組成部分的設計指標的合理性對于保障高速公路交通安全至關重要。
平行式加速車道由加速段和漸變段組成,其長度直接影響著主線合流區(qū)的交通安全和通行能力。國內(nèi)外學者對于加速車道長度進行了深入研究。E.DABBOUR等[1]基于實際駕駛?cè)诵袨楹蛙囕v加速能力研究了加速車道最小長度;唐宗鑫等[2]提出了一種基于概率方法的加速車道長度計算模型;李霞等[3]基于車輛安全合流概率建立了加速車道長度模型,提出了加速車道長度推薦值;李敏[4]以修正二階Erlang車頭時距分布模型為基礎建立了加速車道長度計算模型;倪旭[5]基于交通流理論與運動學理論建立了加速車道計算模型。
在高速公路平行式加速車道長度研究中,大部分學者僅重點分析討論加速車道加速段長度,對漸變段長度多是參照日本《高速公路設計要領》[6]和美國AASHTO制定的《A Policy on Geometric Design of Highways and Streets》[7](以下簡稱《AASHTO道路設計規(guī)范》)進行計算,對于車輛換道軌跡考慮較為簡單。不少學者對車輛的換道軌跡進行了研究,閆堯等[8]設計了一種基于5次多項式的自主車輛換道模型;賀玉龍等[9]對換道時車輛的運動特征及位置、速度關系進行分析,建立了車輛安全換道模型;潘兵宏等[10]提出了基于雙曲正切函數(shù)的車輛換道模型,并通過實際數(shù)據(jù)與仿真模擬對模型進行檢驗。
綜上,目前國內(nèi)外缺乏對曲線路段漸變段長度計算模型和方法等的深入研究,更沒有從滿足停車視距角度對此進行研究。筆者在分析加速車道漸變段處車輛的換道軌跡特征、小客車駕駛?cè)送\囈暰嘈枨蟮幕A上,分析研究平行式加速車道漸變段長度計算模型,并對模型中的關鍵參數(shù)深入分析,擬提出平行式加速車道漸變段長度影響因素、計算模型及最小長度取值方法。
1 車道組成及漸變段影響因素
1.1 平行式加速車道組成
加速車道的作用是為匯入主線的車輛提升行駛速度,并等待左側(cè)車道出現(xiàn)可插入間隙后匯入主線前提供行駛空間。通常加速車道形式分為直接式、平行式2種,一般設置在主線外側(cè)車道的外側(cè),且加速車道范圍內(nèi)的平縱線形指標通常與主線一致。
平行式加速車道由車輛加速段、等待段及漸變段3部分組成(圖1),其中加速段的作用為供車輛加速行駛至安全合流行駛速度,等待段的作用是為車輛尋找主線安全合流插入間隙提供空間;而漸變段的作用是為行駛到等待段末端的車輛橫移換道進入主線提供空間。
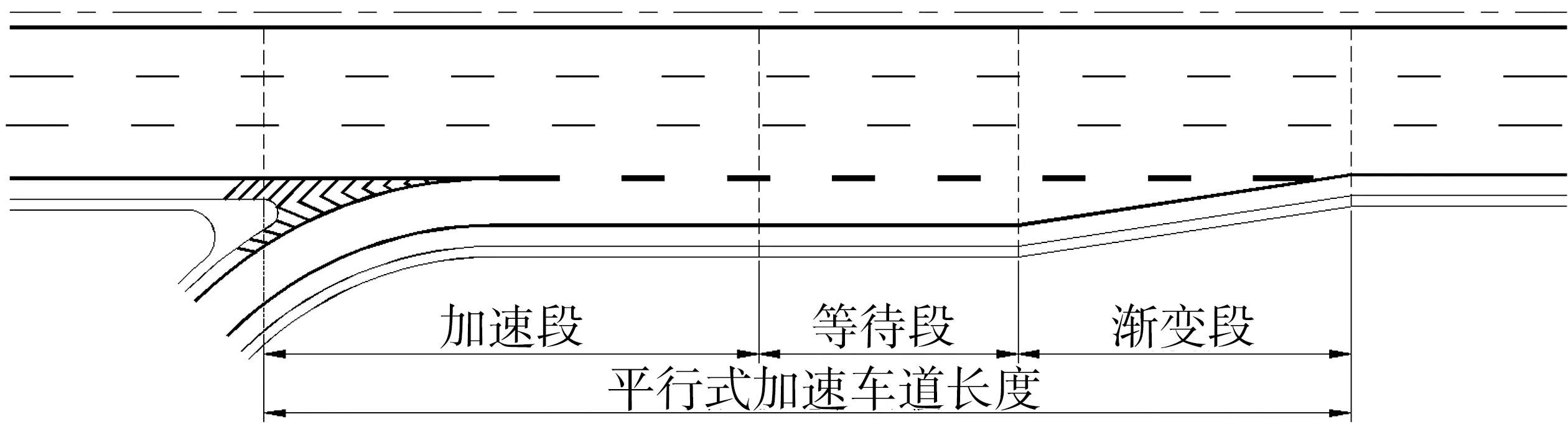
圖1 平行式加速車道構成Fig. 1 Parallel acceleration lane composition
1.2 曲線路段平行式加速車道漸變段長度影響因素
從平行式加速車道漸變段的作用可以知道,影響平行式加速車道漸變段長度的主要因素是車輛實際換道距離,而換道過程與車輛的行駛速度、換道時的緊迫性、換道時車輛橫向加速度大小等有關。
由于漸變段路面寬度變窄及護欄的遮擋,車輛在換道時,小車駕駛?cè)说囊暰€還可能受路側(cè)護欄的遮擋,影響匯入車輛的行車安全(圖2),而視距受到橫凈距的影響,路側(cè)橫凈距的大小與硬路肩的寬度有關。此外主線圓曲線半徑、橫坡及縱坡也會影響視距。但考慮到互通式立交范圍內(nèi)主線的橫坡及縱坡較為平緩,因此影響平行式加速車道漸變段長度的因素主要考慮加速車道漸變段起點處車輛的行駛速度、換道緊急程度、硬路肩寬度、主線圓曲線半徑。

圖2 加速車道漸變段處的換道行為及駕駛?cè)艘暰€情況Fig. 2 Lane change behavior and driver’s eyeline at the transition section of the acceleration lane
1.2.1 加速車道漸變段起點處合流速度
車輛從匝道入口匯入主線時,將在加速車道上加速行駛達到足夠的合流速度,并在等待段上尋找可插入間隙匯入主線,當?shù)竭_平行式加速車道漸變段起點時,由于車道數(shù)減少、路面寬度變窄,合流車輛將在三角漸變段進行強制換道操作以匯入主線。車輛合流速度越大實際換道長度越長,則所需加速車道漸變段長度越長,反之,所需漸變段長度越短。
1.2.2 換道時的緊迫性與換道時橫向加速度大小
車輛換道長度除與換道時的行駛速度有關,還與換道時周圍環(huán)境的緊迫性和換道時橫向加速度大小有關。緊迫性越強,駕駛?cè)送瓿蓳Q道的期望越強烈,實際換道距離越短;換道時的橫向加速度越大,完成換道操作所用的時間越短且換道的距離越短,則滿足換道要求所需的平行式加速車道漸變段長度越短,反之車輛實際換道距離越長,所需的加速車道漸變段長度越長。
1.2.3 硬路肩寬度
由于平行式加速車道漸變段處路面寬度變窄、車道數(shù)減少,駕駛?cè)艘暰€易受路側(cè)護欄的遮擋,為保證車輛安全匯入主線,三角漸變段長度應滿足視距的要求,而視距受橫凈距影響。加速車道及主線右側(cè)硬路肩寬度越大,所能提供的橫凈距越大,則滿足視距所需的加速車道漸變段長度越小。反之,若加速車道右側(cè)硬路肩寬度較小,則駕駛?cè)艘暰€越易受到路側(cè)護欄的遮擋,需要更長的加速車道漸變段長度才能滿足。
1.2.4 主線圓曲線半徑
當加速車道位于右偏曲線內(nèi)側(cè)時,除路面寬度變化的影響外,由于主線曲率的影響,路側(cè)護欄更可能會對駕駛?cè)说囊暰€造成遮擋。主線曲率半徑越大,則滿足視距要求所需的橫凈距越小,所需的加速車道漸變段長度越小,反之則需要更長的加速車道漸變段長度以滿足視距要求。
2 計算模型
2.1 滿足換道需求漸變段長度計算模型
2.1.1 車輛換道模型
車輛在從加速車道匯入主線行車道的換道長度會影響平行式加速車道漸變段長度。我國JTG D20-2017《公路路線設計規(guī)范》(以下簡稱《路線規(guī)范》)在進行加速車道漸變段長度計算時主要參考日本《高速公路設計要領》及《AASHTO道路設計規(guī)范》的規(guī)定,即考慮車輛橫移一個車道所需的時間,或?qū)⒎聪蚯€作為車輛的換道模型(圖3),但該換道模型在換道起始位置和結(jié)束位置曲率并不為零,且在A、B、C這3點的曲率半徑變化不連續(xù),而實際上車輛在進行換道時,其軌跡曲率連續(xù)變化。

圖3 反向曲線換道模型Fig. 3 Reverse curve lane change model
潘兵宏等[10]通過分析Simi-Motion軟件提取的高速公路出入口路段無人機航拍視頻的車輛換道軌跡,提出了基于雙曲正切函數(shù)的車輛換道模型及其關鍵參數(shù)的建議值,并通過實際數(shù)據(jù)與CarSim仿真軟件對模型進行驗證。結(jié)果表明該模型能反映真實的換道軌跡,且該模型中的相關系數(shù)能反映駕駛?cè)笋{駛習慣與換道環(huán)境的緊急情況。考慮到車輛位于直線路段與曲線路段時,其換道軌跡大致相同,均為S型軌跡,故筆者均選用雙曲正切換道模型分析滿足換道需求的漸變段長度。該換道模型如式(1):
(1)
式中:x為換道車輛相對于目標車道與原車道間車道線之間的距離;x0與xT分別為車輛換道開始與結(jié)束時車輛相對于車道線的橫向距離,當加速車道寬度為3.500 m,主線行車道寬度為3.750 m時,假定車輛換道開始與結(jié)束均位于行車道中心,則x0=-1.750 m,xT=1.875 m;β和δ是與x0、xT相關的系數(shù);Ld為換道長度;Vd為換道時車輛的縱向合流速度;τ為駕駛?cè)笋{駛換道緊急程度系數(shù)。根據(jù)雙曲正切換道模型與車輛實際換道軌跡的擬合結(jié)果,軌跡模型參數(shù)取值分布如表1。
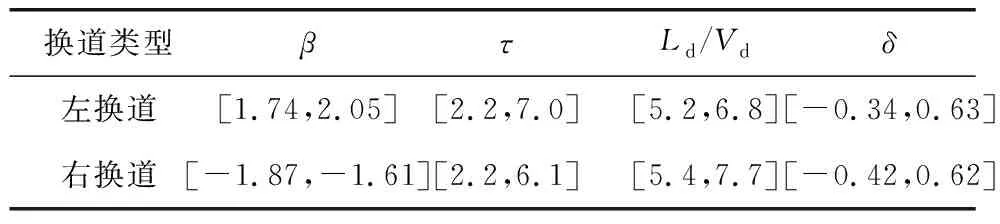
表1 雙曲正切換道軌跡模型參數(shù)取值分布Table 1 Parameter distribution of hyperbolic tangent lane change trajectory model
將雙曲正切換道模型表達式對時間t求二階導,即得到橫向加速度a的表達式:
(2)

(3)
經(jīng)移項、簡化后可以得到:
(4)
式中:τmin為緊急系數(shù)的最小值,考慮到車輛若需要在漸變段處換道情況比較緊急,駕駛?cè)吮仨毻瓿蓳Q道,屬于強制性換道,緊急系數(shù)最小值取3;amax為最大橫向加速度,與行車舒適性密切相關,橫向加速度越小,乘客感覺越舒適。根據(jù)文獻[11],車輛在不同設計速度下允許的橫向加速度的一般值和極限值如表2。

表2 橫向加速度amax一般值和極限值Table 2 General and limit values of lateral acceleration amax
2.1.2 合流末端車輛運行速度Vd
滿足換道需求的平行式加速車道漸變段長度與車輛縱向行駛速度密切相關,而加速車道漸變段已是加速車道合流末端,故車輛縱向行駛速度為安全合流速度,文獻[6]通過統(tǒng)計,得到車輛安全合流速度為60~70 km/h,這也是我國有關合流速度取值的主要參考;美國AASHTO對車輛安全合流的運行速度規(guī)定值則相對較大,日、美國安全合流速度規(guī)定如表3[7]。
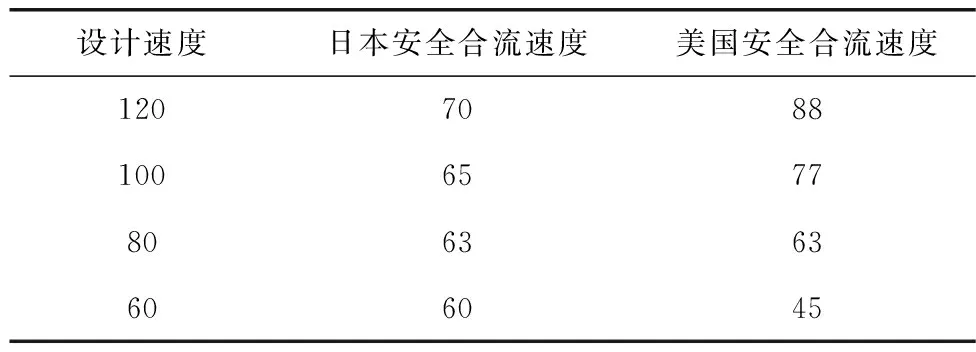
表3 日本、美國安全合流速度規(guī)定Table 3 Safe confluence speed regulations of Japan and the United States (km/h)
文獻[5]通過UMRR鏈式開普勒雷達對廣東的5座互通式立交合流區(qū)內(nèi)車輛運行速度進行采集與分析,發(fā)現(xiàn)車輛在主線設計速度為120 km/h的樣本互通上行駛時,加速車道中段的運行速度大致可達60~75 km/h,且車輛在加速車道終點運行速度可達80 km/h。從保證車輛安全合流角度出發(fā),參考國內(nèi)外對于安全合流速度的相關規(guī)定并綜合樣本互通車輛運行速度實測數(shù)據(jù),確定合流末端小型車運行速度Vd如表4。
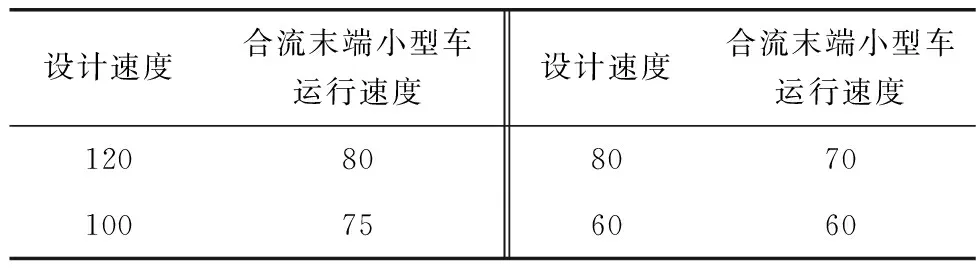
表4 合流末端車輛運行速度Table 4 Vehicle running speed of confluence end (km/h)
2.1.3 漸變段長度計算值
根據(jù)式(4),結(jié)合表2、表4,計算得到不同設計速度下,滿足換道需求的漸變段長度如表5。
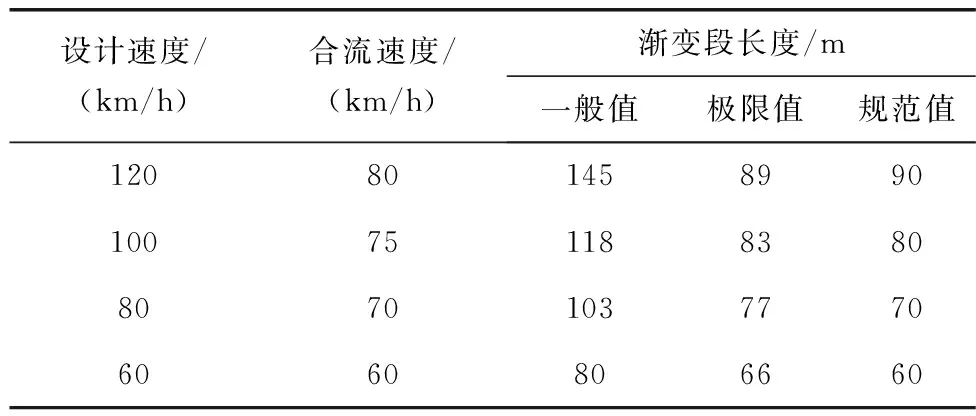
表5 滿足車輛換道需求的漸變段長度計算值Table 5 Calculation value of the length of the transition section to meet the lane changing needs of vehicles
表3可知:主線設計速度越高,滿足車輛換道需求的平行式加速車道漸變段長度越大。計算的極限值與規(guī)范值《路線規(guī)范》相差不大,一般值比規(guī)范值有不同程度的增加,且設計速度越大增幅越大。表明當三角漸變段長度采用規(guī)范值時,能滿足極限狀態(tài)下車輛橫移換道的需求,但此時車輛橫移加速度較大,若想讓駕駛?cè)耸孢m從容的完成換道操作,應適當提高平行式加速車道漸變段長度。
2.2 滿足停車視距要求的漸變段長度計算模型
為保證漸變段車輛橫移換道時的安全,高速公路加速車道漸變段長度還應滿足停車視距的要求。
駕駛?cè)嗽谛熊囘^程中應能隨時看到前方相當遠的一段路程,一旦發(fā)現(xiàn)前方路面有障礙物能及時采取制動措施至到達障礙物前安全停車,這個最短距離稱為停車視距。《路線規(guī)范》規(guī)定我國高速公路、一級公路以及匝道路段應該滿足停車視距的要求。由于加速車道漸變段處車道數(shù)減少、路面寬度變窄,路側(cè)護欄將對小車駕駛?cè)艘暰€造成遮擋,可能引起停車視距不足,因此應根據(jù)停車視距要求對漸變段長度進行分析。
當加速車道位于左偏曲線路段外側(cè)時,主線曲率利于加速車道駕駛?cè)擞^察主線行車道車輛,通視區(qū)域較大,停車視距容易滿足;當加速車道位于右偏曲線內(nèi)側(cè)時,除路面寬度變化外,主線曲率也會引起護欄對駕駛?cè)艘暰€的遮擋,在此基礎上進行道路寬度漸變,可能會嚴重影響駕駛?cè)藢η胺降缆返挠^察。因此,對右偏曲線內(nèi)側(cè)的加速車道漸變段長度進行分析,若其能滿足停車視距的要求,則該漸變段長度也能滿足左偏曲線路段的停車視距要求。
2.2.1 漸變段長度計算模型
平行式加速車道位于右偏曲線內(nèi)側(cè)時,駕駛?cè)嗽跐u變段的視線情況如圖4。
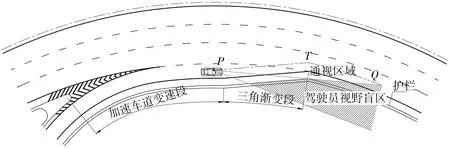
圖4 駕駛?cè)嗽谇€路段的漸變段視線情況Fig. 4 Driver’s eyeline in the transition section of a curved road section
圖4中PQ為駕駛?cè)俗笠暰€,與右側(cè)護欄相切。PTQ為簡化的駕駛?cè)说囊朁c軌跡示意線,其與駕駛?cè)艘暰€所圍成的區(qū)域為駕駛?cè)送ㄒ晠^(qū)域,當視點軌跡線長度大于停車視距時,通視區(qū)域較大,駕駛?cè)税l(fā)現(xiàn)前方障礙物后能及時減速避免相撞。若視點軌跡線長度小于停車視距時,當駕駛?cè)税l(fā)現(xiàn)前方車道內(nèi)的障礙物時,可能來不及避讓,存在碰撞的事故風險。
根據(jù)停車視距要求及圖4的幾何關系,建立基于視距需求的曲線路段平行式加速車道漸變段長度計算模型,如圖5。

圖5 曲線路段漸變段計算模型Fig. 5 Calculation model of transition section of a curved road section
圖5中,P點為駕駛?cè)艘朁c位置,根據(jù)JTG B01—2014《公路工程技術標準》道路設計中小客車寬度為1.8 m,載重汽車寬度為2.5 m。根據(jù)文獻[12],小客車駕駛?cè)艘朁c位置約在距離車輛左側(cè)邊緣0.5 m處,載重汽車駕駛?cè)艘朁c位置約在距離車輛左側(cè)邊緣0.6 m處。車輛在道路上行駛時基本位于道路中央,車輛左、右側(cè)距離車道邊緣存在一定寬度。假定駕駛?cè)艘朁c在距離加速車道左側(cè)路緣帶1.2 m,高度1.2 m的位置,加速車道寬度為3.5 m,則小客車左側(cè)側(cè)向安全寬度為0.7 m,右側(cè)側(cè)向安全寬度為1.0 m;同理,載重汽車左側(cè)側(cè)向安全寬度為0.6 m,右側(cè)側(cè)向安全寬度為0.4 m。此時,小客車基本位于車道中央,載重汽車右側(cè)側(cè)向安全寬度較小。但由于載重汽車的視點位置高且行駛速度較慢,一定程度上減小了右側(cè)側(cè)向安全寬度較小的影響。故當加速車道寬度為3.5 m時,認為駕駛?cè)艘朁c位置在距離加速車道左側(cè)路緣帶1.2 m,高度為1.2 m處,如圖6。
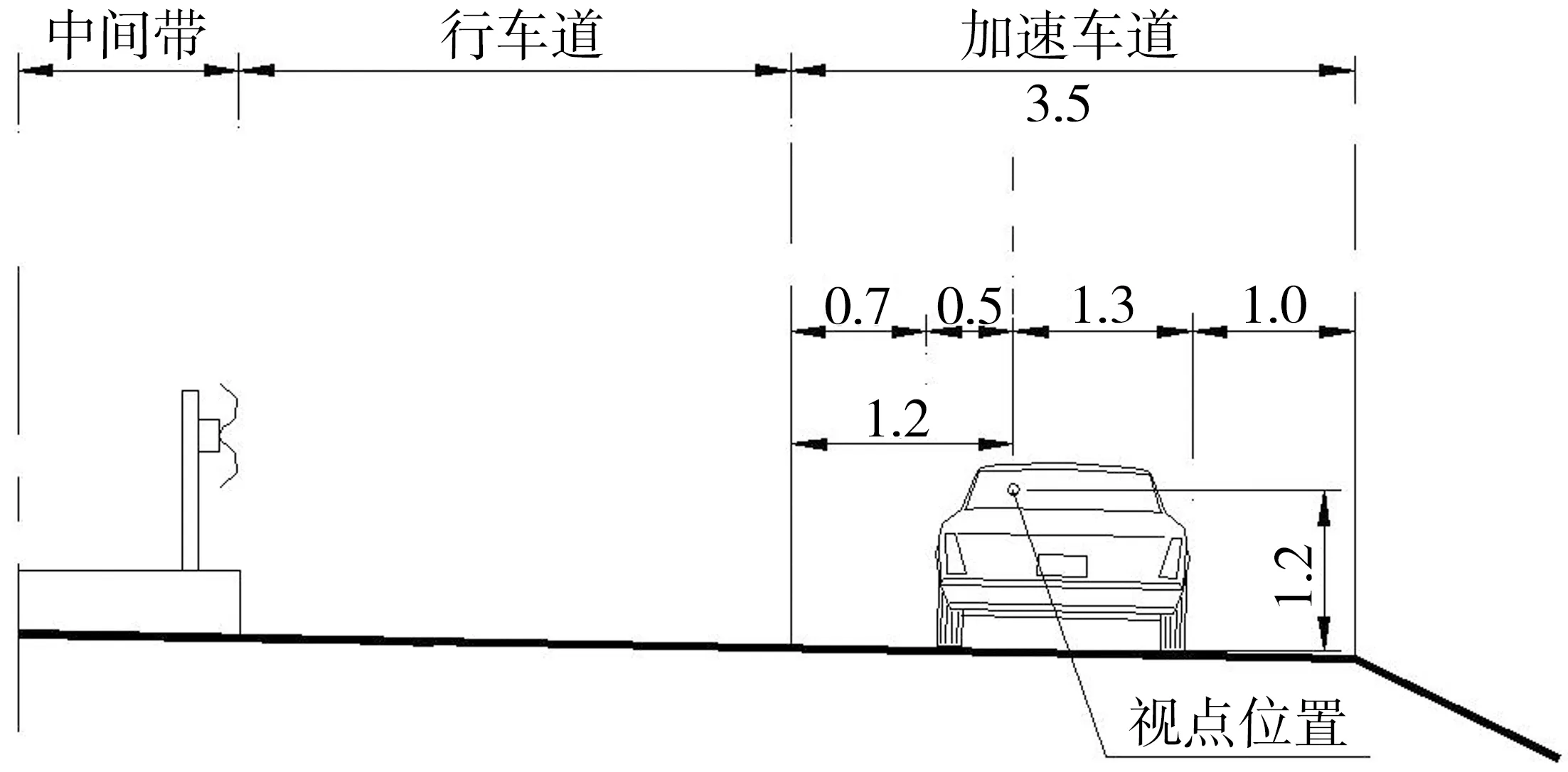
圖6 加速車道駕駛?cè)艘朁c位置(單位:m)Fig. 6 The driver’s viewpoint position on acceleration lane
PT平行于漸變段外側(cè)護欄與主線最外側(cè)行車道中線相交于點T,長度為L1;PQ為駕駛?cè)俗笠暰€,與行車道外側(cè)護欄相切于S點,PS長度為L4,SQ長度為L5,則曲線路段平行式加速車道漸變段長度計算公式為:
(5)
式中:L1+L2為簡化的車輛行駛軌跡長度;L3為曲線路段平行式加速車道漸變段長度;L4+L5為從駕駛?cè)艘朁c沿視線方向至目標車道中心的距離;ST為停車視距(根據(jù)《路線規(guī)范》按表6取值);d1為主線最右側(cè)行車道中心至加速車道漸變段處車輛駕駛?cè)艘朁cP的距離;d2為主線最右側(cè)行車道中心至右側(cè)硬路肩邊緣的距離,簡稱為車輛右側(cè)路面寬度(按表6取值);α1為L3對應的圓心角;α2為L2對應的圓心角;R為主線圓曲線圓心至直線最右側(cè)行車道中心的距離,簡稱為圓曲線半徑(按表7取值);主線行車道寬度為3.75 m,加速車道寬度為3.50 m。

表6 主線右側(cè)硬路肩寬度及高速公路停車視距Table 6 Width of hard shoulder on the right side of mainline and stopping sight distance of expressway
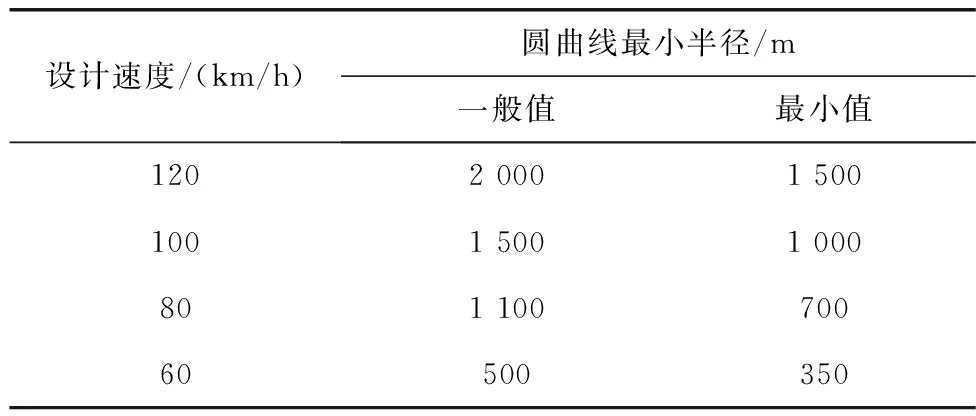
表7 變速車道路段的主線圓曲線最小半徑Table 7 Minimum radius of mainline circle curve in the variable speed lane section
2.2.2 漸變段長度計算值
按照不同設計速度下各參數(shù)進行取值,代入式(5),解得不同主線圓曲線半徑、硬路肩寬度與停車視距要求下的曲線路段右側(cè)入口加速車道漸變段長度,如圖7。

圖7 曲線路段滿足停車視距的加速車道漸變段長度Fig. 7 Length of transition section of acceleration lane satisfying the stopping sight distance in curve section
根據(jù)圖7可知,停車視距一定時,道路圓曲線半徑及右側(cè)硬路肩寬度的大小均會影響加速車道漸變段長度取值;不同停車視距要求下,滿足停車距的三角漸變段長度變化趨勢大致相同,其長度隨主線圓曲線半徑及右側(cè)硬路肩寬度的增大而減小。當主線設計速度為120 km/h,右側(cè)硬路肩寬度為3.0(2.5、1.5)m時,若對應的主線路段圓曲線半徑小于1 900(2 300、4 000)m,加速車道漸變段采用規(guī)范最小長度時,將無法滿足停車視距的要求;當主線設計速度100 km/h時,右側(cè)硬路肩寬度為3.0(2.5、1.5)m時,主線半徑小于1 050(1 250、2 000)m時,采用規(guī)范規(guī)定的漸變段長度無法滿足停車視距要求;當主線設計速度為80 km/h或60 km/h時,加速車道漸變段長度滿足停車視距要求。
因此,主線設計速度為120 km/h或100 km/h時,采用規(guī)范規(guī)定的平行式加速車道漸變段長度時,可能存在停車視距不足的情況,存在安全隱患,應根據(jù)主線圓曲線半徑及硬路肩寬度適當提高漸變段長度的取值(根據(jù)圖8、圖9選取),主線設計速度為80 km/h或60 km/h時,規(guī)范規(guī)定的加速車道漸變段長度滿足視距要求。

圖8 滿足停車視距要求的漸變段長度計算值(Vd=120 km/h)Fig. 8 Calculation values of the length of the transition section satisfying the stopping sight distance (Vd=120 km/h )

圖9 滿足停車視距要求的漸變段長度計算值(Vd=100 km/h)Fig. 9 Calculation values of the length of the transition section satisfying the stopping sight distance (Vd=100 km/h )
3 應用示例
為保障加速車道等待段末端車流合流的安全,曲線路段平行式加速車道漸變段長度應根據(jù)換道長度(表3)及停車視距要求(圖8、圖9)共同確定,其中漸變段長度一般值LT1應滿足駕駛?cè)耸孢m從容的進行換道操作(換道長度一般值),且滿足停車視距計算值;極限值LT2應為滿足極限狀態(tài)下駕駛?cè)藫Q道操作及停車視距計算值。
以設計速度為120 km/h,圓曲線半徑為1 700 m,硬路肩寬度為3.0 m的曲線路段加速車道為例,確定其漸變段長度取值。根據(jù)圖8可知:該路段條件下滿足停車視距的漸變段長度為113 m;滿足換道要求的漸變段長度一般值為145 m,極限值為89 m,因此該路段漸變段取值一般值應為145 m,極限值應為113 m。其余情況依次類推。
4 結(jié) 論
為保證漸變段車輛安全舒適匯入主線,考慮駕駛?cè)嗽诟咚俟非€路段平行式加速車道漸變段的實際行車需求,采用雙曲正切曲線作為車輛換道軌跡,通過數(shù)學關系反算滿足行車舒適性條件下的加速車道漸變段最小長度;并根據(jù)漸變段長度與視點位置和停車視距之間的關系,建立了滿足停車視距要求的漸變段長度計算模型;綜合換道需求和停車視距要求,得到了曲線路段平行式加速車道漸變段合理取值。研究表明加速車道位于曲線路段時,規(guī)范規(guī)定的漸變段長度僅能滿足主線設計速度小于100 km/h時停車視距的要求,當主線設計速度大于等于100 km/h時,采用規(guī)范值存在停車視距不足的情況,宜適當提高漸變段最小長度。
