基于視頻的車站客流狀態(tài)識別方法研究
2023-09-08 00:58:20高武刁欣然張余豪姬光王艷輝
鐵路技術創(chuàng)新 2023年3期
高武,刁欣然,張余豪,姬光,王艷輝,6,7,8
(1.北京京城地鐵有限公司,北京 101300;2.北京交通大學 交通運輸學院,北京 100044;3.北京交通大學 先進軌道交通自主運行全國重點實驗室,北京 100044;4.北京市軌道交通建設管理有限公司,北京 100068;5.北京聲迅電子股份有限公司,北京 100094;6.北京交通大學 北京市城市交通信息智能感知與服務工程技術研究中心,北京 100044;7.北京交通大學 城市軌道交通運營安全管理技術及裝備交通運輸行業(yè)研發(fā)中心,北京 100044;8.運營主動安全保障與風險防控鐵路行業(yè)重點實驗室,北京 100044)
0 引言
近年隨著城市軌道交通線路長度的快速增長,線網(wǎng)的織密,城市軌道交通客運量占全國公共交通客運總量的分擔比率逐年提高。截至2021 年底,共有50 個城市開通城市軌道交通運營線路283 條,運營線路總長度9 206.8 km。2021 年全年累計完成客運量236.9 億人次,同比增長34.7%,總進站量146.3 億人次,同比增長33.7%,總客運周轉(zhuǎn)量1 981.8億人公里[1]。在北京、上海、廣州、深圳這些超大城市中,平均每座車站日均進站量1萬人次,并且由于城市軌道交通系統(tǒng)網(wǎng)絡化運營的特點,車站之間會相互影響,一個車站運營中斷甚至會造成線網(wǎng)大范圍運營受阻。
安全是城市軌道交通完成其根本任務、根本使命的前提和基礎。客流狀態(tài)是影響車站安全事件發(fā)生的1個主要因素,科學合理地對客流狀態(tài)進行評價對城軌運營安全起著重要作用。目前雖然北京、上海等國內(nèi)城市軌道交通行業(yè)頭部運營公司都對城市軌道交通安全保障與風險管控方面有了長足的研究,但其中對客流狀態(tài)的辨識大部分仍是車站乘務員、車站管理人員以目視的方法來進行監(jiān)測,而由于車站乘客數(shù)量較多且客流狀態(tài)易受外界環(huán)境的干擾而復雜多變,這種方式不能及時地發(fā)現(xiàn)問題所在,因此有必要采用先進的信息化手段對客流狀態(tài)進行監(jiān)測[2]。客流速度、客流密度是目前城軌客流相關研究中反映客流狀態(tài)的重要屬性,對客流狀態(tài)信息的獲取方法進行研究,通過對目前相關領域算法的研究,形成基于優(yōu)化YOLOv5 和Deep-SORT 的客流狀態(tài)識別方法,并對此方法進行驗證,有助于實現(xiàn)客流狀態(tài)的有效識別,進而提高城軌車站的安全水平。
1 基于優(yōu)化YOLOv5的客流密度識別
1.1 YOLOv5算法優(yōu)化模型
對客流狀態(tài)進行識別首先要通過監(jiān)控設備檢測到乘客的存在,這個過程就是目標檢測,現(xiàn)如今基于深度學習的方法在目標檢測領域成為主流,并且YOLO系列算法取得了良好的效果,是當前研究的熱點。在YOLO 系列算法中,YOLOv5 算法的總體性能指標位于前列[3],但在乘客密集場景的應用還存在改進空間,在密集場景下目標檢測算法經(jīng)常會發(fā)生將多個目標檢測為1個目標的問題,同時檢測到的單個目標也會受到相近其他目標的影響,導致預測效果不佳,從提高預測精度與檢測效果的角度對YOLOv5算法進行優(yōu)化,主要通過網(wǎng)絡結構、損失函數(shù)、檢測框后處理算法3個方面進行優(yōu)化。
1.1.1 網(wǎng)絡結構優(yōu)化
對網(wǎng)絡結構的優(yōu)化主要考慮提高對原網(wǎng)絡結構提取到的特征利用能力,在深度學習領域,注意力機制由于其能夠?qū)χ匾卣鬟M行更多的權重分配、降低重要性低的特征權重、能夠?qū)Ω鞣N網(wǎng)絡模型起到優(yōu)化作用,因此嘗試通過在網(wǎng)絡的骨干部分引入注意力機制來提高特征提取能力。SE(Squeeze-and-Excitation Networks)[4]、CBAM (Convolutional Block Attention Module)[5]、ECA (Efficient Channel Attention)[6]、CA(Coordinate Attention)[7]都是近些年取得較好效果的注意力機制。
在不同應用場景和不同數(shù)據(jù)集條件下,對網(wǎng)絡結構的修改會取得不同效果,為了選取更有效的改進方法,在相同超參數(shù)條件下,使用自制數(shù)據(jù)集對加入SE、CBAM、ECA 和CA 注意力機制的不同模型分別訓練500epoch,訓練結果對比見表1。

表1 注意力機制訓練結果對比
經(jīng)過對比,CBAM注意力機制添加后對模型精度的提高在4種注意力機制中取得了最好的效果,因此選取CBAM機制來提高模型的特征提取性能。
1.1.2 損失函數(shù)優(yōu)化
早期的目標檢測工作使用經(jīng)典損失函數(shù)進行預測框回歸,隨著研究的發(fā)展,目標檢測領域直接采用定位性能度量損失,即將交并比IoU(Intersection over Union)作為定位損失。He 等[8]為了獲得更準確的邊界框回歸和目標檢測,在2021 年提出了一種統(tǒng)一GIoU、DIoU、CIoU這3種基于IoU的損失函數(shù)的新?lián)p失函數(shù)α-IoU,通過對IoU 損失加上額外的power 正則化項,使得其能夠概括現(xiàn)有基于IoU的損失,計算方法見式(1),以CIoU 為例,α-CIoU 損失函數(shù)可以表示為式(2)。
式中:Pα2(B,Bgt)為根據(jù)檢測框B和Bgt計算的懲罰因子;b、bgt分別代表了檢測框B和Ground truth G 的中心點,且ρ為2 個中心點間的歐式距離;c為能夠同時覆蓋檢測框B和Ground truth G 的最小矩形的對角線距離;。
實證研究表明,在大多數(shù)情況下使用α=3 的α-IoU損失會在目標檢測任務中取得較好的效果。采用α-CIoU 對原模型進行修改,α取3,修改后效果對比見表2。

表2 α-CIoU損失函數(shù)效果對比
可以看出應用α-CIoU損失函數(shù)后相比原CIoU損失函數(shù)模型精度有一定的提高,因此選取α-CIoU 損失函數(shù)來提高模型的檢測框精度。
1.1.3 檢測框后處理算法優(yōu)化
現(xiàn)有的檢測模型在檢測框后處理階段多采用NMS算法來對網(wǎng)絡預測到的多個預測框進行篩選。在使用NMS算法篩選預測框時,先給定閾值來對檢測框的IoU范圍進行評價判斷,然后在給定閾值范圍內(nèi),高置信度預測框被保留,較低置信度預測框被刪除。這種篩選預測框的方法依賴設定的閾值好壞,在原模型中閾值為基于IoU 的閾值,根據(jù)前文分析,IoU 的效果并不如改進后的α-IoU,考慮將后處理算法中的閾值更改為基于α-IoU 的閾值,形成α-CIoU-NMS,修改后效果見表3。

表3 α-CIoU-NMS效果對比
通過引入注意力機制對網(wǎng)絡結構進行優(yōu)化,使用α-CIoU損失函數(shù)對原模型損失函數(shù)優(yōu)化,將α-CIoU引入NMS 形成α-CIoU-NMS 后處理方法對原模型進行優(yōu)化,改進后模型精度得到一定提高。
1.2 車站區(qū)域客流密度識別流程
城軌車站是一個乘客密集的場所,因此利用優(yōu)化YOLOv5算法對城軌車站區(qū)域的乘客進行檢測,以提高檢測效果。在得到目標檢測模型后可以對監(jiān)控視頻中乘客數(shù)量進行識別,進一步實現(xiàn)車站區(qū)域客流密度識別主要利用目標檢測得到的當前監(jiān)控區(qū)域的乘客數(shù)量N與設置的當前監(jiān)控區(qū)域?qū)嶋H面積S,根據(jù)密度計算公式得到,具體方法如下:
(1)接入監(jiān)控視頻;
(2)設置待檢測區(qū)域,輸入待檢測區(qū)域面積S;
(3)監(jiān)控視頻處理,對原圖像進行裁剪,得到設定的檢測區(qū)域圖像作為待檢測圖像;
(4)將待檢測圖像送入目標檢測模型對該區(qū)域進行行人檢測,此過程輸入為待檢測區(qū)域的圖像,輸出為待檢測區(qū)域內(nèi)的每個行人的檢測框坐標信息及行人總數(shù)N;
(5)得到行人總數(shù)N之后與待檢測區(qū)域的面積S按照客流密度公式進行計算;
(6)輸出該區(qū)域的客流密度ρ。
2 基于目標追蹤與相機標定的客流速度識別
2.1 基于Deep-SORT的多目標追蹤
目標追蹤領域目前主流方法是基于深度學習和相關濾波的算法,在各種深度學習目標跟蹤算法中Deep-SORT 作為SORT 算法的改進,其在多目標追蹤任務中速度和精度都位于前列,并且可以較好地處理遮擋帶來的目標丟失問題,因此被廣泛應用于各種多目標追蹤任務中,因此選取Deep-SORT 算法作為客流速度獲取過程中的目標跟蹤算法。
Deep-SORT 是在SORT 算法的基礎上進行深化的,SORT 先在連續(xù)圖像序列之間利用卡爾曼濾波方法進行目標位置預測與更新,主要利用目標的位置和運動特征,再采用匈牙利算法對檢測框與預測框的分配通過IoU 進行優(yōu)化求解實現(xiàn)目標前后信息匹配[9],Deep-SORT 算法額外考慮了追蹤目標的外觀信息,引入重識別領域的目標外觀特征提取模型,將外觀特征與運動特征級聯(lián)匹配,解決了SORT在面對遮擋時目標變化的問題[10]。Deep-SORT 算法流程見圖1,主要有3 個部分內(nèi)容,目標檢測提取候選框、特征提取、數(shù)據(jù)關聯(lián)匹配。
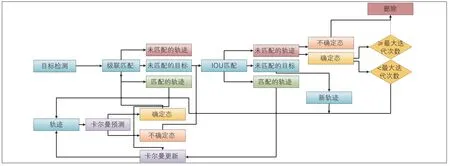
圖1 Deep-SORT算法流程
2.2 基于單目相機標定的坐標轉(zhuǎn)換方法
由于通過視頻圖像獲取的行人坐標為圖像的像素坐標,其與真實坐標存在區(qū)別,需要獲取二者的換算模型,將圖像的像素坐標與真實世界坐標對應。由于只需要得到像素坐標與真實坐標的轉(zhuǎn)化關系,不需要對相機各個參數(shù)進行求解,所以化簡后得到式(3):
式中:M即為投影矩陣,由攝像機焦距光心等內(nèi)部結構和攝像機擺放位置和拍攝角度等外部參數(shù)決定,由于是在齊次坐標系中進行變換,對矩陣M乘以任意一個非零常數(shù)對坐標對應關系沒有影響,所以設m34為1。獲取6組對應的像素坐標與真實坐標,將其帶入式(3)進行方程組求解,即可得到投影矩陣。在得到投影矩陣后即可將像素坐標與真實坐標轉(zhuǎn)換,所采集的行人速度只需要得到真實的二維平面坐標,行人是在一個平面上進行移動,zw在平面上恒為0,將式(3)展開后可以得到式(4):
則與(xw,yw)與(u,v)對應關系可以用式(5)表示:
2.3 車站區(qū)域客流速度識別流程
在利用目標檢測加目標追蹤得到城軌車站行人移動的軌跡后,結合像素坐標與真實坐標的轉(zhuǎn)換關系即可得到行人的真實移動速度,具體流程如下:
(1)YOLOv5 對圖像序列進行目標檢測,得到監(jiān)控圖像內(nèi)當前時刻每個行人檢測框的像素坐標;
(2)Deep-SORT 算法對連續(xù)圖像序列中的行人進行追蹤,得到下一時刻行人所處位置及檢測框的像素坐標;
(3)利用像素坐標與真實坐標的轉(zhuǎn)換關系對得到的行人檢測框坐標進行轉(zhuǎn)換,得到當前時刻與下一時刻行人檢測框的真實坐標;
(4)計算當前時刻與下一時刻檢測框底部中心點真實坐標;
(5)利用速度計算公式得到該行人的真實移動速度;
(6)對當前區(qū)域所有行人移動速度進行平均得到當前區(qū)域客流速度。
3 實例驗證
3.1 車站乘客數(shù)據(jù)集構建
基于改進的YOLOv5 算法對車站客流密度和客流持續(xù)時間進行識別,首先要對目標數(shù)量進行統(tǒng)計。基于深度學習的目標檢測算法應用效果受數(shù)據(jù)集影響很大,如果數(shù)據(jù)集內(nèi)樣本單一,場景單一,則訓練出來的網(wǎng)絡模型各項指標只能夠在該數(shù)據(jù)集下取得,在其他場景中的應用效果可能達不到在驗證集上的評估效果,要確保在某一場景下的實際應用效果良好,最可靠的方式就是建立該場景下的數(shù)據(jù)集,構建的數(shù)據(jù)集來源是某站內(nèi)各區(qū)域的實際監(jiān)控視頻,分屬于步梯、扶梯、閘機、站臺,基本覆蓋了車站內(nèi)各個區(qū)域。
為了保證行人樣本的充足,在各區(qū)域內(nèi)選取行人較多的視頻樣本,對視頻進行按幀提取圖片的操作,考慮到視頻為25 幀/s,每幀之間行人變化極小,對每幀圖片進行提取會導致數(shù)據(jù)集的冗余。因此選擇每10 幀提取1 次圖片,最終提取出3 916 張樣本圖片,經(jīng)過篩選剔除無人圖片以及重復圖片,最終將3 000 張圖片納入車站乘客數(shù)據(jù)集,樣本見圖2。
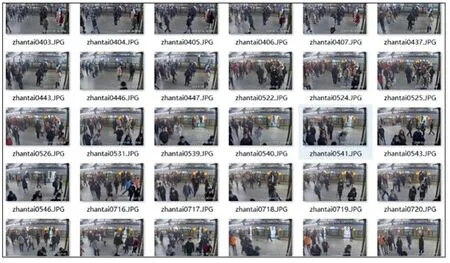
圖2 車站乘客數(shù)據(jù)集樣本
將數(shù)據(jù)集按照9∶1的比例劃分為訓練集和驗證集,在Windows10系統(tǒng),11G顯存GeForceRTX2080Ti顯卡的環(huán)境中設置Batch_size 為16,epoch 為1 000,經(jīng)過13 h訓練后損失值趨于平穩(wěn),此時繼續(xù)訓練優(yōu)化效果不大,停止訓練,從訓練過程中選取最優(yōu)的模型文件保存,訓練過程損失變化見圖3,900epoch 后基本損失函數(shù)平穩(wěn),結束訓練。
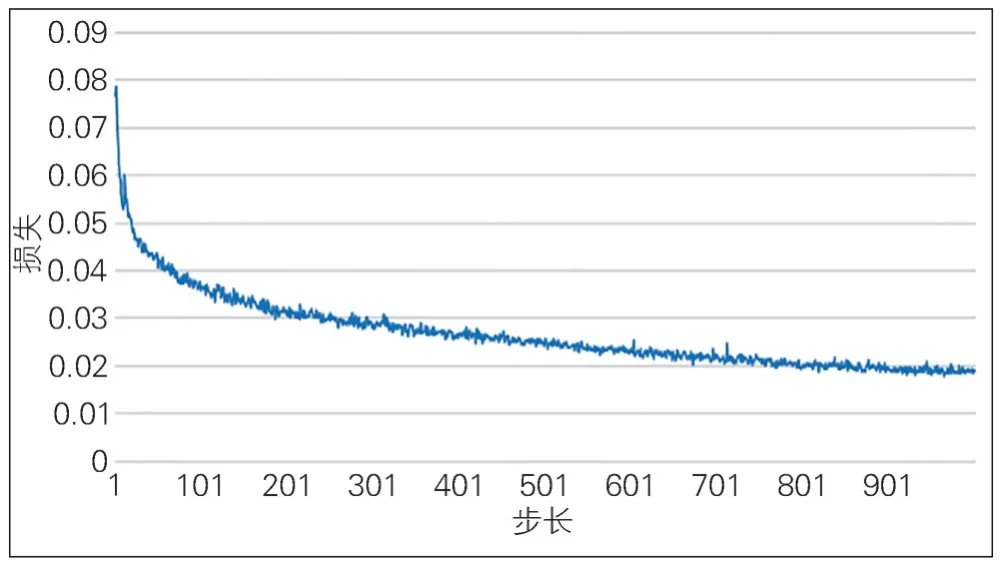
圖3 模型訓練過程損失變化
3.2 區(qū)域客流密度實驗結果分析
由于所采用的客流密度識別方法中的監(jiān)控區(qū)域面積是根據(jù)實際情況給定的,客流密度和客流持續(xù)時間識別都是對乘客數(shù)量進行檢測,因此對客流密度和客流持續(xù)時間識別方法有效性進行評估可以等價于對目標檢測的有效性進行評估。
選取訓練數(shù)據(jù)之外的閘機、站臺、扶梯、步梯4個區(qū)域不同密度等級的100張圖片分別進行測試,檢測效果見圖4。在站臺區(qū)域由于監(jiān)控范圍過大,遠處小目標人體可由另一端相機進行檢測,所以只檢測靠近相機的一半?yún)^(qū)域的乘客,遮擋不嚴重的大部分人體都可以被檢測到,但在人群極度密集環(huán)境如站臺等,會存在漏檢的情況,同時由于監(jiān)控視頻畫面中還會存在一些不屬于監(jiān)控范圍的較遠區(qū)域的人體,在檢測過程中也會對這些人體進行檢測造成誤檢,導致檢測到的人體比畫面中的實際人體數(shù)量還要更多,此部分誤檢可以在實際應用中設定監(jiān)控范圍進行控制。
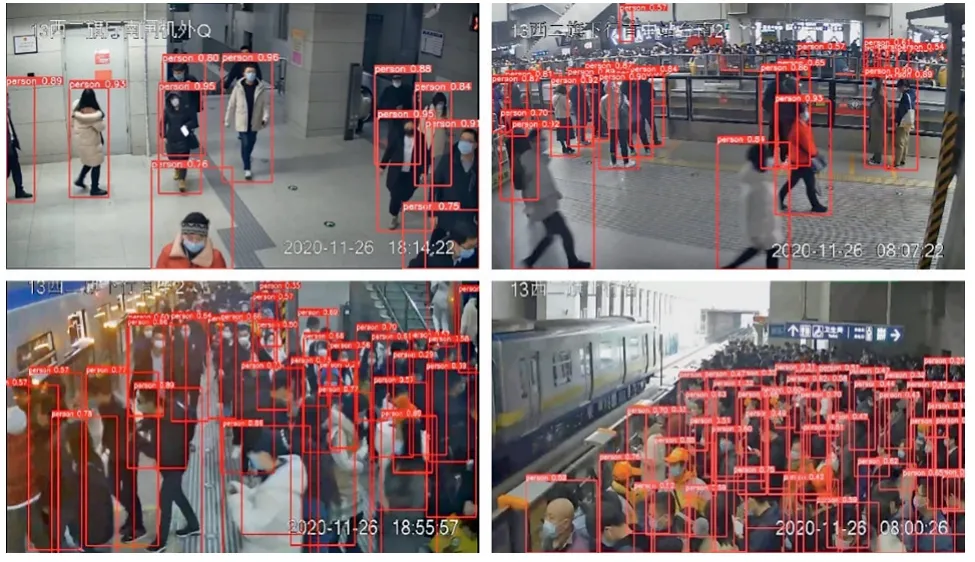
圖4 行人檢測效果
將優(yōu)化后模型與原模型在各區(qū)域識別到的人數(shù)與真實人數(shù)進行對比,結果見表4 與圖5,其中站臺區(qū)域檢測到的人體數(shù)量為剔除誤檢人體之后的數(shù)據(jù)。可以看出在利用車站乘客數(shù)據(jù)集對優(yōu)化后模型進行針對訓練后,優(yōu)化后模型效果相比原模型更好,平均精度達到86.82%。
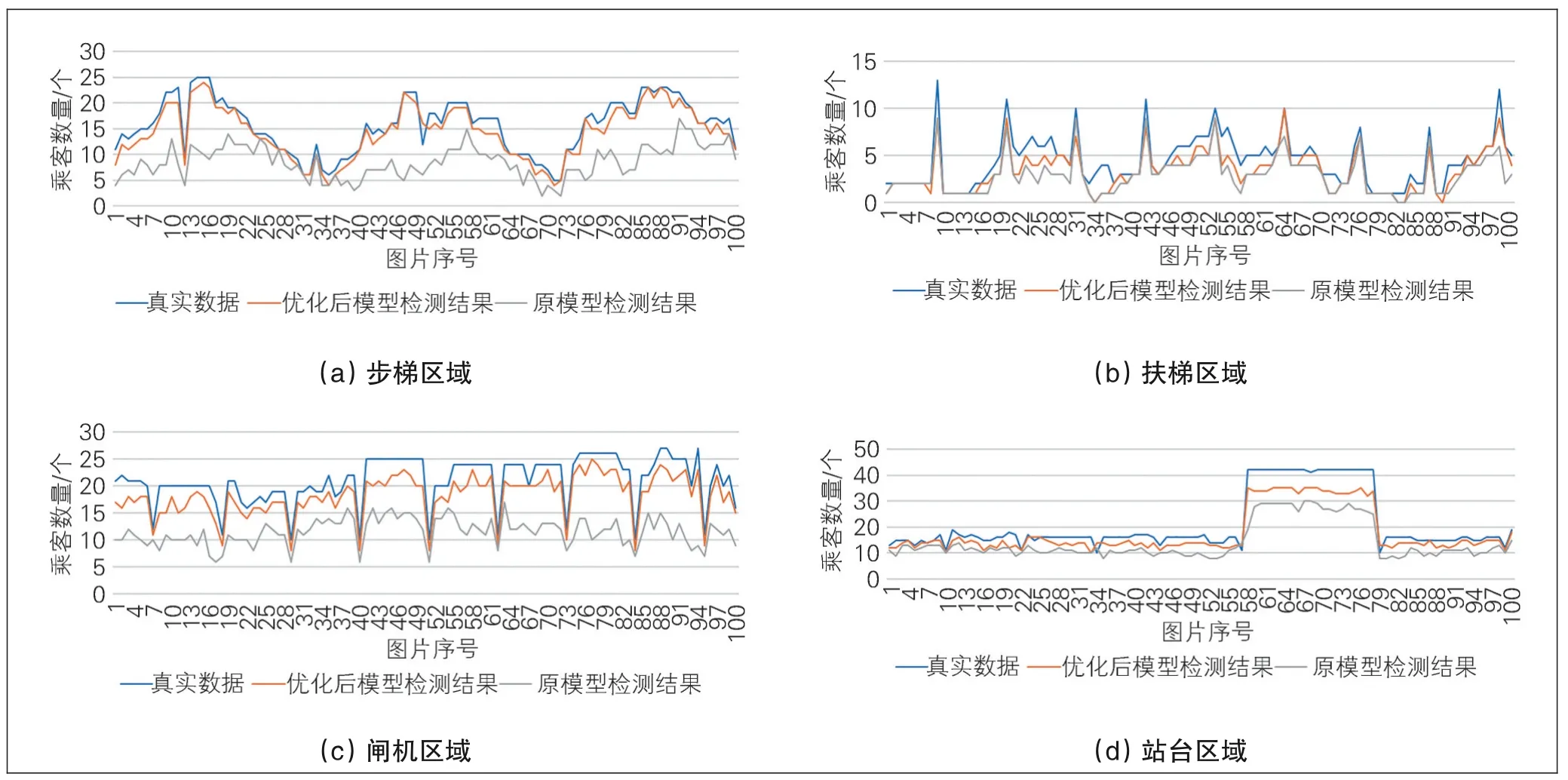
圖5 不同區(qū)域檢測結果對比

表4 不同區(qū)域檢測精度對比
3.3 區(qū)域客流速度實驗結果分析
在城軌車站監(jiān)控視頻中對客流速度識別方法進行驗證,車站監(jiān)控視頻標定情況見圖6。首先對坐標變換進行驗證,對其中導向標識L1、L2兩點的距離進行換算,選取O、A、B、C、D、E六點作為特征點進行標定,根據(jù)標定得到的投影矩陣及式(5)將L1、L2的像素坐標轉(zhuǎn)為真實坐標(見表5),求得2 個導向標識之間的距離長度為1.02 m,L1、L2的真實距離1 m,在監(jiān)控視頻中坐標換算的誤差為2%。

圖6 車站監(jiān)控視頻標定情況

表5 L1、L2坐標換算結果
對速度識別方法進行驗證(見圖7),該場景下乘客P在27 s時坐標為(375,214),33 s時坐標為(317,539),進行坐標轉(zhuǎn)換后坐標換算結果見表6,計算可得行人P速度為1.02 m/s,行人真實的速度為0.95 m/s,在監(jiān)控視頻中乘客速度的識別精度為93.2%。
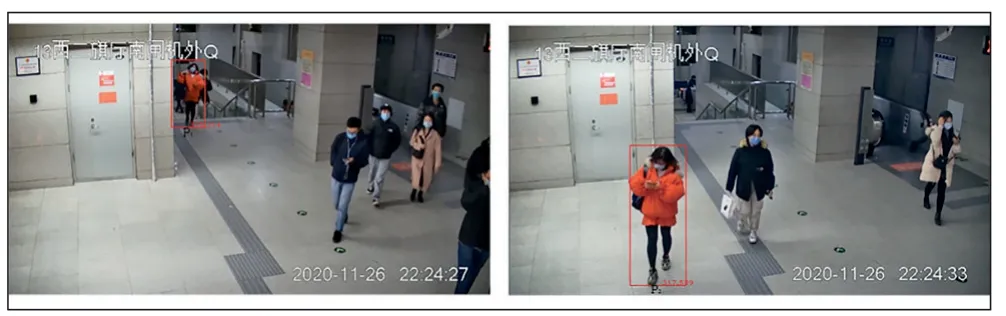
圖7 單人速度計算示例
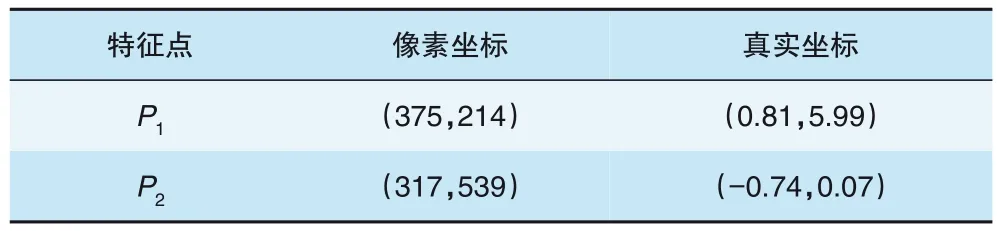
表6 乘客P前后時刻坐標換算結果
多人場景速度檢測見圖8,對檢測框能完全覆蓋的乘客,識別到的速度較為可靠,由于個別位于樓梯或扶梯的乘客,其坐標點不在標定平面,因此坐標換算存在誤差,從而導致速度準確度較低,在實際應用中可以預設檢測范圍以確保檢測區(qū)域在標定的平面來改善此問題。
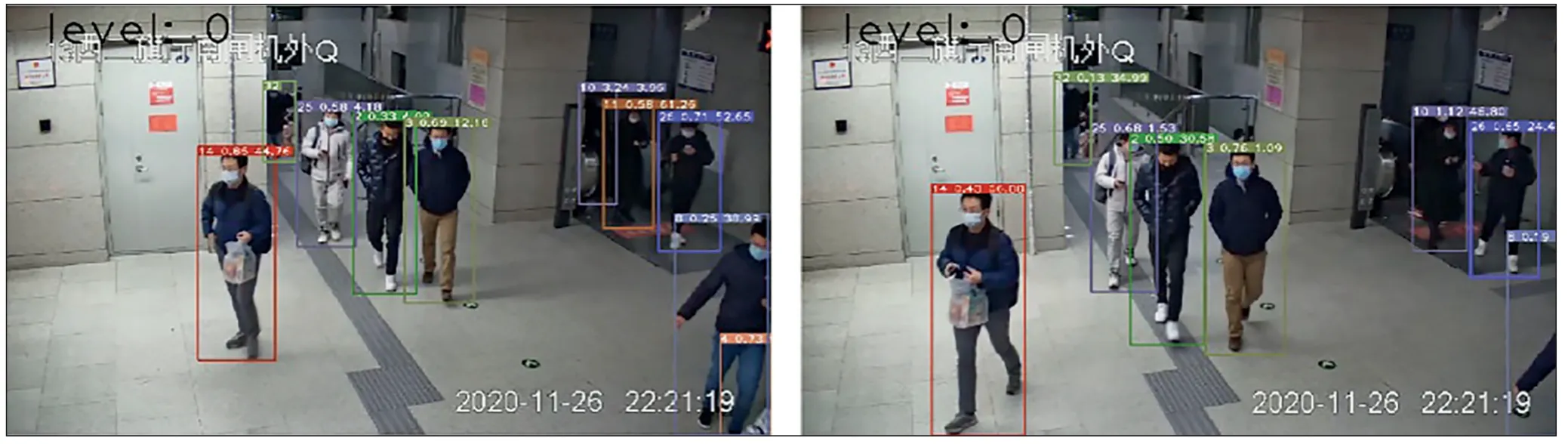
圖8 多人場景速度檢測示例
4 結束語
對車站客流信息獲取方法進行研究,首先通過對目標檢測算法進行分析,選取目前工程效果較好的YOLOv5 算法作為行人檢測模型,以實現(xiàn)對客流密度信息的獲取;其次從網(wǎng)絡結構修改、損失函數(shù)改進、后處理方法改進3 個方面對YOLOv5 算法進行改進,提高了檢測精度,同時自制城軌乘客數(shù)據(jù)集進行訓練,提高了YOLOv5算法在城軌車站場景中的檢測準確率;最后選取目前時效比最好的Deep-SORT 目標追蹤算法作為行人追蹤模型,并結合單目相機標定實現(xiàn)對客流真實速度信息的獲取,為基于視頻數(shù)據(jù)的車站客流狀態(tài)信息獲取提供了基礎。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
中學生數(shù)理化·七年級數(shù)學人教版(2021年6期)2021-11-22 07:50:58
中學生數(shù)理化·七年級數(shù)學人教版(2021年6期)2021-11-22 07:50:58
中學生數(shù)理化·七年級數(shù)學人教版(2021年6期)2021-11-22 07:50:58
中學生數(shù)理化·七年級數(shù)學人教版(2020年10期)2020-11-26 08:24:50
數(shù)學物理學報(2020年2期)2020-06-02 11:29:24
光學精密工程(2016年6期)2016-11-07 09:07:19
海峽科技與產(chǎn)業(yè)(2016年3期)2016-05-17 04:32:12
中國科技博覽(2016年2期)2016-04-25 20:32:39
小學生導刊(2016年34期)2016-04-11 00:49:44