基于STM32F407的智能溫室大棚系統
2023-09-07 02:47:58鄧輝李燁
中國新技術新產品 2023年14期
鄧 輝 李 燁
(1.國家知識產權局專利局專利審查協作廣東中心,廣東 廣州 510555;2.仲愷農業工程學院,廣東 廣州 510000)
隨著5G 技術的推廣,物聯網技術逐漸成熟,隨即出現了大批傳統行業與物聯網相結合的新興行業,例如精準農業、智慧工廠和智慧城市等,其中精準農業是未來農業發展的新潮流。農業現代化的重要標志是應用自動控制和電子計算機實現農業生產和管理的自動化。該文提出了一種基于STM32F407 單片機的智能溫室大棚系統。該系統操作簡單,價格低廉,可滿足用戶的溫室大棚種植需求,幫助用戶實現足不出戶對大棚環境進行遠程監控,并遠程控制灌溉、抽風和補光等操作。
1 系統功能
該智能溫室大棚系統可幫助用戶監控溫室環境信息,還可以遠程檢測和控制農作物在溫室環境中生長所需要的溫度、光照和土壤濕度等。該智能溫室大棚系統包括5個功能模塊,分別如下:1)智能溫控模塊。可根據溫濕度傳感器模塊采集環境數據,繼而判斷溫室大棚內的溫濕度狀況。如果溫度太高,則打開抽風機;溫度太低,則關閉抽風機。2)智能光照強度控制模塊。可利用光敏電阻采集數據判斷當前的光照強度。如果光照強度太低,則開啟補光燈;如果光照強度太強,則進行遮陽并關閉補光燈。3)智能灌溉模塊。利用土壤濕度傳感器采集數據以判斷是否缺水,并通過執行器進行合理灌溉。4)大棚內顯示模塊。通過OLED 顯示當前環境信息。5)數據遠程傳輸及可視化顯示模塊。智能溫室大棚中采集的所有數據都可以通過Wi-Fi 發送到客戶端,在客戶端進行直觀可視化展示,并遠程控制各模塊操作。
該系統對灌溉、抽風和補光等操作進行自動控制和手動控制。在自動控制模式下,系統內設置有不同植物在各個生長階段的灌溉、抽風和補光等參數,并基于采集的數據自動進行灌溉、抽風和補光等操作。在手動控制模式下,用戶基于各種傳感器采集的數據手動控制灌溉、抽風和補光等操作。該系統能夠通過采集大棚內溫濕度、光照和雨量等數據,并且基于植物在不同階段生長的適宜環境,對溫室大棚內空氣溫濕度、光照強度和土壤濕度等因素進行采集,并上傳到數據平臺進行實時監測,智能判斷該環境數據是否適宜,以保證大棚內種植物能在最適的環境下生長。該系統的整體結構如圖1 所示,通過傳感器、單片機獲取環境信息,各項信息可通過OLED 在本地顯示,還能通過Wi-Fi 模塊將數據上傳到云平臺,實現遠程可視化操作。同時通過云平臺下發指令控制執行器,進行補光、灌溉及抽風等操作,還可以通過比較采集的信息與閾值自動控制執行器。
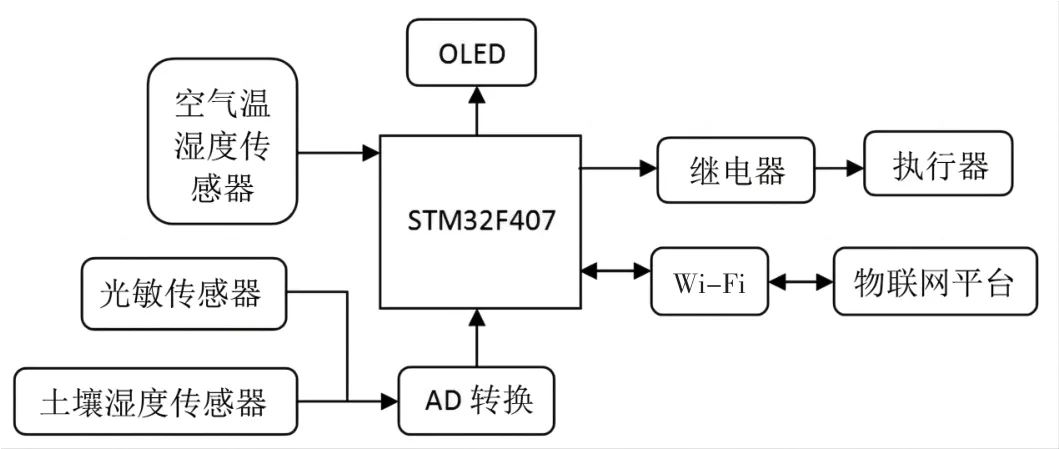
圖1 系統結構框圖
2 系統硬件設計
該系統的硬件分為溫控模塊、光控模塊、灌溉模塊、OLED 模塊以及可視化模塊。
2.1 溫控模塊
溫控模塊原理如下:首先,設置閾值為T1、T2,其中T1>T2,閾值T1、T2的設置與植物種類及生長周期相關。傳感器采集當前溫度信息T3,并將T3與T1比較,如果T1
該系統采用型號為DHT11 的傳感器檢測空氣中的溫、濕度,該傳感器具有響應塊、抗干擾能力強等優點,其為包括已校準數字信號輸出的溫、濕度復合傳感器[1]。DHT11溫濕度傳感器的相關介紹見表1,該傳感器主要有3 個引腳,VCC 接電源3.3V,GND 接地,DATA 接單片機I/O 口。
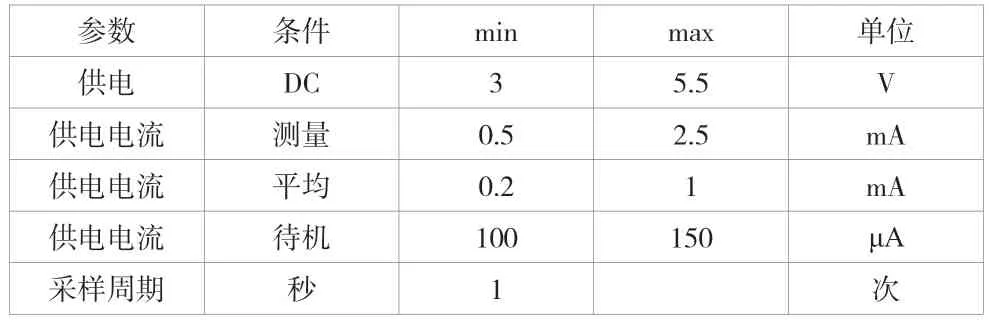
表1 DHT11 電氣參數
2.2 光控模塊
光控模塊原理如下:設置2 個閾值G1和G2,G1為高閾值,G2為低閾值,閾值的設置與植物種類及生長周期等相關。當前光照強度信息為G3,采集當前光照強度信息G3與G1、G2比較,如果G3
該系統利用光敏傳感器采集光照強度數據。光敏電阻模塊對環境光線較敏感,一般用來檢測周圍環境的光照強度。當環境光線亮度達不到設定閾值時,DO 端輸出高電平;當外界環境光線亮度超過設定閾值時,DO 端輸出低電平。光敏電阻是用硫化隔或硒化隔等半導體材料制成的電阻器,其工作原理基于內光電效應。隨著光照強度的升高,電阻值迅速降低,由于光照產生的載流子都參與導電,在外加電場的作用下做漂移運動,電子奔向電源的正極,空穴奔向電源的負極,從而使光敏電阻器的阻值迅速下降。其在無光照的情況下,幾乎呈高阻狀態,暗電阻很大[2]。光敏電阻模塊電路圖如圖2 所示。
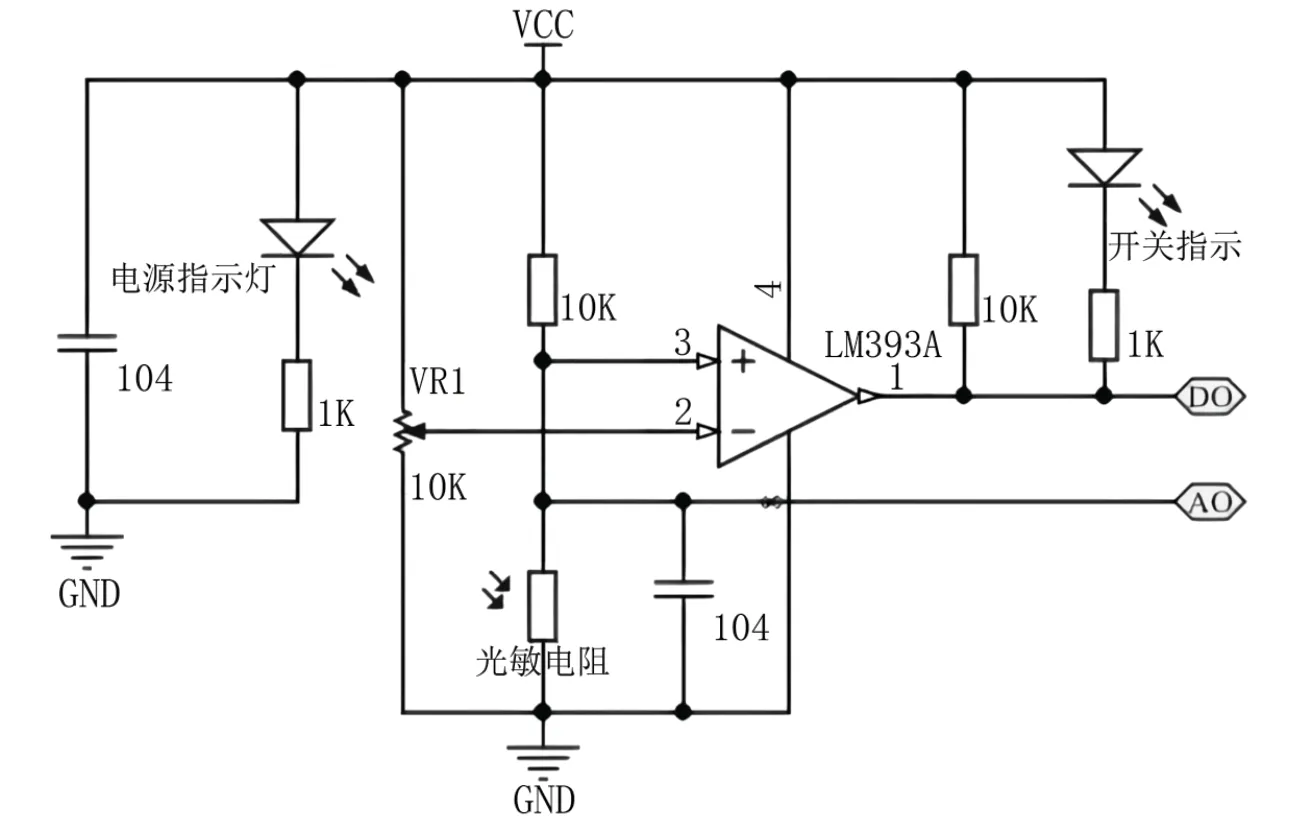
圖2 光敏電阻模塊電路圖
2.3 灌溉模塊
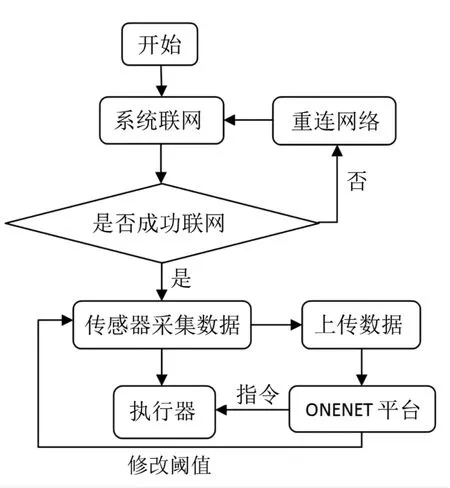
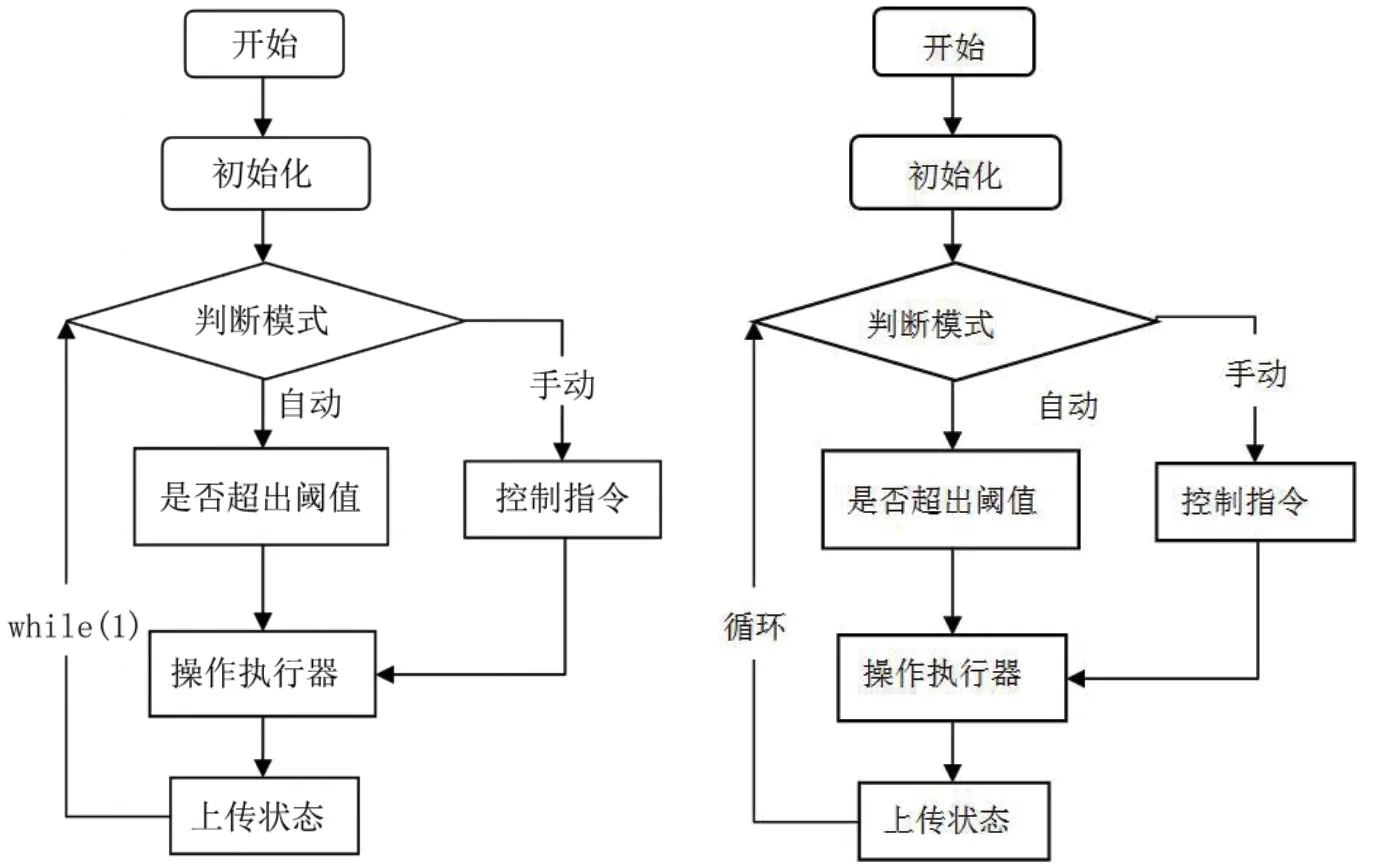
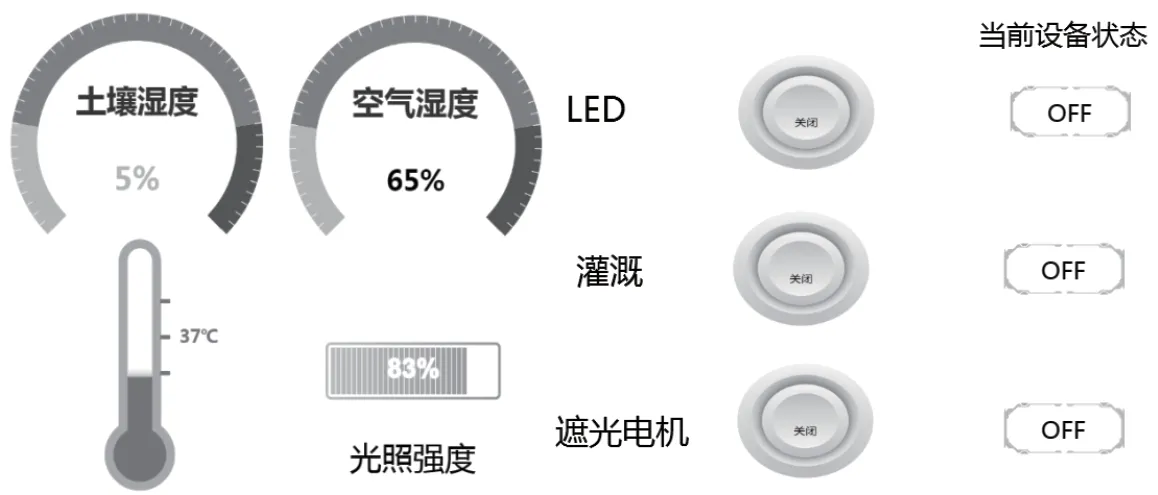
灌溉模塊原理如下:設置閾值S1,該閾值的設置與植物種類及生長周期相關。采集當前土壤濕度信息S2與S1比較,如果S2 該系統采用土壤濕度模塊FC-28 進行數據采集。它通過2 個電極檢測土壤的導電性,通過輸出模擬量獲取比較精確的土壤濕度數據,以判斷是否缺水。如果缺水,則啟動水泵進行適當灌溉。土壤濕度傳感器內部電路與光敏電阻傳感器模塊大致相同,可以大范圍檢測土壤的濕度。通過電位器調節控制相應閾值,當土壤濕度低于設定值時,DO 引腳輸出高電平;高于設定值時,DO 引腳輸出低電平。模擬量輸出口AO 可以和單片機AD 模塊相連,通過AD 轉換可以獲得土壤濕度的準確數值[3]。 OLED 模塊置于溫室大棚中,用于實時顯示大棚中的環境信息,方便用戶在大棚中觀察數據信息。OLED 模塊的顯示芯片為SSH1106。可視化模塊主要是將傳感器采集的數據信息通過Wi-Fi 發送到客戶端中進行記錄并處理,并以可視化的形式呈現,便于查看。該系統選用ESP-01S 模塊作為Wi-Fi 模塊,采用32bit/80MHz 精簡指令集處理器,具有完備的TCP/IP 棧,可通過AT 指令方便快捷地進行TCP/IP 連接。 該系統軟件設計流程圖如圖3 所示。系統運行時先初始化各種硬件設備。當Wi-Fi 模塊初始化完成后,判斷是否成功聯網,如果沒有成功聯網,則重連網絡;成功聯網后,采集傳感器將采集各項數據傳輸至執行器及OneNET 平臺。并且系統還可連接OneNET 的EDP 服務器,完成客戶端配置,配置信息包括服務器的地址、名稱和端口號。所有配置完成后,系統連接EDP 服務器。連接成功后,設備已經具有向服務器發送數據的功能,最終通過執行器控制智能溫室大棚系統的各種設置。 圖3 系統軟件設計流程圖 系統采集環境的數據包括空氣溫濕度、光照強度以及土壤濕度等,通過Wi-Fi 模塊發送到OneNET 的服務器,并在客戶端顯示實時數據,同時智能判斷溫濕度狀況、光照強度狀況和土壤濕度狀況。如果溫度過高,則打開風扇;溫度過低,則關閉風扇,并打開加熱器。判斷光照強度,如果光照強度過低,則打開補光燈;光照強度太強,則關閉補光燈并進行遮陽。如果土壤濕度傳感器判斷為缺水,則通過繼電器控制水泵進行灌溉。總之,系統通過各種傳感器采集農作物生長環境信息,通過OLED 本地顯示,并通過物聯網云平臺遠程顯示溫室大棚信息,判斷當前環境是否適合植物生長。可以通過手動和自動2 種方式控制執行器來改善溫室大棚中植物的生長環境。 執行器主要作用包括控制LED 補光燈,并通過繼電器控制灌溉水泵、散熱風扇、加熱器和遮擋窗簾。執行器程序流程圖如圖4 所示。系統運行開始后先初始化設備,系統進入循環模式,判斷是自動還是手動。選擇自動模式時,則判斷采集的數據是否超出閾值并使執行器自動進行相應操作;選擇手動模式時,則手動控制執行器進行相應操作,同時將執行器狀態上傳至云端。 圖4 執行器程序流程圖 OneNET 平臺界面顯示如圖5 所示,采用OneNET 中國移動物聯網開放平臺進行界面顯示,用戶可以遠程查看溫室大棚的環境,包括土壤濕度、空氣溫濕度和光照強度等信息,做到足不出戶對溫室環境信息進行遠程監控,時刻掌握農作物生長環境信息,還可通過手動遠程控制執行器,并同時查看執行器狀態。 圖5 OneNET 平臺界面顯示 測試條件:通過控制操作界面上的執行器開關查看系統中各個執行器的狀態。根據實際記錄的數據統計見表2。如在操作界面點擊LED 按鈕后,LED 被點亮,OneNET 平臺上的按鈕開關顯示開啟狀態,點擊關閉,LED 滅,開關狀態顯示關閉。 表2 執行器狀態測試記錄 該文提出了一款基于STM32F407的智能溫室大棚系統,該系統包括PC 端的上位機客戶端和基于STM32F407 的數據采集端。系統具有調節溫室大棚空氣濕度功能、控制大棚光照強度功能、采集土壤濕度功能以及自動灌溉功能,OLED 可實時顯示當前大棚環境信息,還實現了數據的遠程傳輸,在遠程端可進行可視化直觀展示,使該文研究的智能溫室大棚系統具有成本低、安全性高且性能穩定的優勢。2.4 OLED 模塊和可視化模塊
3 系統軟件設計與實現
4 執行器程序設計
5 試驗結果
5.1 遠程環境監控模塊測試
5.2 手動控制執行器測試

6 結語
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
中老年保健(2021年12期)2021-08-24 03:30:40
中國傳媒大學學報(自然科學版)(2021年1期)2021-06-09 08:43:00
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
中國生殖健康(2020年6期)2020-02-01 06:28:50
新世紀智能(英語備考)(2019年12期)2020-01-13 06:07:18
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
中國生殖健康(2019年11期)2019-01-07 01:28:02
