井下電機車調度監控自動化設計
2023-08-31 09:34:44田少帥
機械管理開發 2023年7期
田少帥
(山西焦煤西山煤電東曲礦運輸科, 山西 古交 030200)
0 引言
井下電機車運輸具有方式靈活、運載效率高等優點,可實現煤礦地面與井下的點對點運輸,極少的中間轉載環節可大大提高井下運輸安全及可靠性。目前我國大力發展井下電機車運輸技術,但在車輛調度指揮及實時監控兩方面存在諸多問題。電機車運行多采用定時定點線性運輸模式,地面調度人員通過停車點固定電話獲取車輛運行情況,無法對車輛實施合理調度指揮,且駕駛員只能在停車點等待得到指令后發車,運輸效率大大降低。同時調度員無法獲取機車在巷道中運行的實時信息,駕駛員只能盲目駕駛,存在極大安全隱患。
針對上述問題,本文首先建立了無線通信網絡,通過車載采集終端實現車輛的運行數據實時采集上傳,并通過上位機交互界面對車輛運行軌跡、模擬畫面進行實時顯示。在此基礎上,對井下電機車運行方式及調度方案進行優化,通過對側進路閉鎖、岔路口信號燈互鎖等手段解決車輛混行安全問題,系統經自適應控制策略可對司控道岔執行器進行遠程自動控制,在緊急情況下也可以由調度員根據機車運行情況隨時分區段、進路以及車輛的形式進行手動調度,大大提高井下電機車運輸效率及安全性[1]。
1 井下電機車交通運輸調度監控系統總體設計方案
傳統井下電機車運輸系統主要存在的問題是無法實現運輸全流程的感知及智能合理調度,由于監控現場多采用定點監控基站區段檢測,在巷道轉彎處及障礙物較多、粉塵濃度較高的復雜路段監控存在較大死區。采用有線網絡進行通信導致各類信號在轉換及傳輸上存在錯誤及滯后,現場數據不具備實時性,實時監控手段的缺失導致調度員無法掌握井下所有運行車輛的分布及行駛狀態,只能盲目調度,事故發生率較高。車輛運行方式及調度控制邏輯不合理,信號燈轉換、分區分段行車指令、道岔位置與車輛進路開放等調度動作只能手動操作完成,當出現岔口會車、多車輛混行等情況時無法下達及時、合理的調度指令,運輸安全性及效率無法得到保證。
本文從車輛運行實時監控及調度指揮方式優化兩方面對井下電機車運輸系統進行智能化設計改造。高效快速的通信網絡是實現實時監控與智能調度的基礎,在系統原有有線以太網的基礎上,采用Zigbee無線通信對井下通信網進行架構,實現井下通信網關與現場各監控基站的數據傳輸。實時監控方面,系統具備車輛位置精確定位、車速檢測、道岔集中監控、岔間方向遙控功能,還具備會車預警、超速報警、追尾報警等安全功能。按照上述功能劃分,采用模塊化思想對系統整體結構進行設計,如圖1 所示。
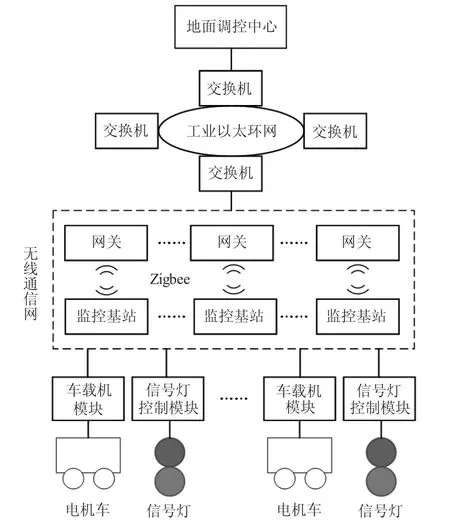
圖1 系統整體結構設計
通信網絡由地面以太環網及井下無線通信網構成,無線通信網主要設備包括安裝于巷道的各網關及監控基站,網關可接收來自監控基站的現場采集參數,通過光纖上傳至地面調控中心上位機,并接收下達來自上位機的控制指令。
2 系統硬件方案設計
系統核心硬件主要包括網關、監控基站、車載機、司控道岔裝置等,為了實現系統監控與智能調度功能,需對上述硬件部分進行合理設計,各核心硬件選型設計如下:
2.1 KJ539-W 礦用本安型機車運輸監控網關
KJ539-W 監控網關的主要功能是實現井上控制指令與現場采集數據的上傳下達,其輸入電壓為DC 5 V,最大工作電流≤700 mA,傳輸速率可達100 Mbit/s。KJ539-W 通過光纜一方面接受工控機的訪問,將所收集的檢測信息打包上傳至上位機,同時接受上位機下發的控制指令;另一方面監控網關將對所連接的檢測設備進行循環檢測,如接收器機車累計請求信息、顯示器和彎道報警器的回測信息等,并下達控制命令,控制顯示器。
2.2 KJ539-F 礦用本安型軌道運輸監控基站
KJ539-F 監控基站的主要功能是實現各機車運行參數及調度管理所需數據的接收上傳。KJ539-F 的輸入電壓為DC12 V,接收頻率為2.4 GHz,天線增益可達2.5 dB,無線傳輸速率可達250 kbit/s。系統運行時,車載機將機車車號編碼及機車調度、管理所需的其它編碼信息經調制后通過Zigbee 傳輸至安裝在巷道各監測點的基站,再經網關通過以太網傳至上位機監控系統,從而使系統實時顯示車號、車類等信息。
2.3 KJ539-CZ 礦用隔爆兼本安型軌道運輸監控車載機
KJ539-CZ 車載機是機車運行參數及調度所需數據的采集與信號發射設備,其發射距離≥50 m,發射頻率為2.4 GHz,傳輸速率可達250 bit/s。車載機模包含速度傳感器、射頻天線、報警模塊等,通過射外置頻天線將采集的車速、位移、車輛標識信息上傳至監控基站,當機車出現超速、追尾可能時,車載機報警模塊將發出相應的聲光報警信號,提示車輛和駕駛員注意安全駕駛。
2.4 ZKC127Q 礦用氣動司控道岔裝置
根據井下運輸圖紙,本文設計配置地軌司控道岔裝置50 套,ZKC127Q 額定電源電壓為AC127 V,電壓波動范圍為80%~110%,最大工作電流為400 mA,設備工作時能與機車運輸監控系統連接,實現岔位信號上傳并實現道岔的集中監視和控制,同時實現機車車載按鍵遙控功能。
3 井下電機車智能調度功能設計
基于高速通信網絡的建立,本文針對事故頻發的岔道路段及會車路段進行調度方案智能優化設計,將巷道以岔道口為界將巷道分為若干巷段,信號燈控制器與監控基站、網關可進行無線通信,采用多信號燈聯動方式為巷道不同方向行駛的電機車提供調度指示,并具備對側閉鎖、信號燈互鎖邏輯控制。
針對巷道岔路口,調度指揮采用對側閉鎖模式,在距岔口某一距離時,任意一條巷道上率先出現車量,則閉鎖對側線路;如同時到達這個距離點,則按設置好的優先級由上位機自動控制信號燈開放或閉鎖。為防止岔口發生車輛碰撞事故,調控上位機具備岔口處信號燈互鎖功能,保證岔口處信號燈狀態不同時開放。
針對巷道會車區域,系統調度指揮方案為:如會車區內有車,則系統自動控制單行道向信號燈閉鎖,單行道上如有車則會車區內的車不允許出車。在緊急情況下調度員可手動設置實現閉鎖,將指定區間的封鎖區間占用;為防止雙向單行道路會車情況出現,系統可自動或手動將同一復用區段鎖死區段兩端信號。
4 現場應用效果
為驗證系統及方案的可行性,將系統部署于山西焦煤西山煤電東曲礦井下運輸巷道中進行實際運行測試,上位機模擬監控調度畫面如圖2 所示。系統運行后,根據可視化模擬畫面對機車運行位置及車速進行實時監測,通過系統監控操作界面可實時查看各機車設備信息狀態,如車輛編號、位置及距岔口、會車區信號燈距離等,同時調度員可通過上位機遠程“改變位置”操作控制機車迅速移動到該位置,實現遠程智能調度;雙擊監控界面信號燈,可彈出包含信號燈標簽、卡號及操作窗口,并可對信號燈紅綠狀態進行遠程設置。經實際測試,系統可實現井下機車的運行監控、遠程調度及車輛自動化控制,現場運行效果良好。

圖2 上位機調度監控模擬畫面
5 結語
本文針對井下電機車運輸系統在監控及調度指揮方面的不足,設計了一套基于無線通信的井下電機車交通運輸調度監控系統。系統可對電機車運行車速、車號標識、位移等數據進行實時監控,針對事故高發的岔路口及會車區設計了具有信號燈互鎖、單向閉鎖的調度指揮方案,并通過系統實現自動化控制,有效提高井下運輸效率及安全水平。
