基于PLC 的立體倉儲控制系統設計★
2023-08-31 09:34:16程晟
機械管理開發 2023年7期
程 晟
(山西能源學院機電工程系, 山西 晉中 030600)
0 引言
《中國制造2025》的核心是創新驅動發展,主線是兩化融合,主攻方向是智能制造[1]。作為智能制造的重要組成部分,柔性制造強調的是滿足用工個性化需求的大規模定制。柔性制造是未來工業生產的主導模式,是將自動化生產、信息技術處理和制造加工技術結合起來,利用先進制造技術、計算機信息處理技術適應新時代的生產要求[2-3]。計算機管理的自動化立體倉庫,是柔性制造系統必不可少的關鍵環節,其管理和控制系統結構具有較高的可靠性和穩定性[4]。自動化倉庫也稱為立體倉庫,一般用作工業生產中流水線上的第一步或最后一步,重點解決搬運效率、產品管理等問題。自動化立體倉庫是物流系統的集散地,是以高層立體貨架為主體,以自動化搬運工具為基礎,以計算機技術為主要手段的高效、大容量現代化儲運設備[5]。
本文設計的立體倉庫的結構是由貨架、堆垛機和控制系統三大部分所構成,可以配合小型自動生產線,完成工件的倉儲及管理,有良好的經濟價值和使用價值。
1 立體倉儲的結構設計
立體倉儲的結構包括貨架、堆垛機兩部分。貨架結構由12 個貨架格(4×3)入貨倉庫和一個出入庫倉位組成。其中出入庫倉位中安裝有光電開關傳感器,以感應貨物是否需要出入動作。堆垛機是立體倉儲核心操作裝置,其速度、精度、穩定度與倉儲效率緊密聯系。其運動包括兩個伺服電機完成堆垛機叉貨裝置的水平(X 軸)和垂直(Z 軸)的定位運動,以及叉貨氣動裝置完成工件出入庫動作。具體結構如圖1 所示。
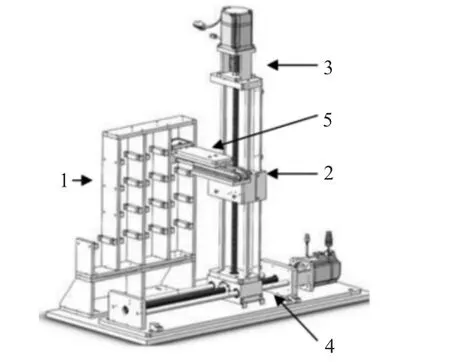
圖1 立體倉儲樣機示意圖
為了讓堆垛機叉貨裝置在定位平面運動中實現多點停留、無級調速等功能,選擇伺服電機帶聯軸器,連接滾珠絲杠進行傳動,以保證其精度。
下面對機電傳動的最主要部件滾珠絲杠選型的計算進行說明。
1.1 絲杠精度的選定
將傳動設計精度的要求換算成使用絲杠長度的允許誤差,確定精度等級,并根據使用條件及成本因素,選取磨制或軋制滾珠絲杠。
1.2 導程的選定
根據已知初選電機額定轉速、負載的最高運行速度以及傳動比,確定導程的選型條件。
1.3 絲杠支承方式的選定
絲杠支承方式由工作行程及最大運行速度條件確定。
1.4 絲杠外徑的選定
絲杠外徑根據軸向游隙要求以及絲杠導程,進行絲杠外徑選型。同時滿足條件可能有多種組合。要對滿足條件的組合分別進行軸向允許載荷、絲杠臨界轉速計算和校核。軸向允許載荷計算主要根據摩擦力、最大加速慣性力、重力、支承方式效率等因素確定。軸向允許載荷校核是根據不同組合絲杠的直徑、導程,計算其實際轉速,判斷是否在臨界轉速范圍。
1.5 螺母類型的選定
根據不同組合絲杠的直徑、導程,選擇螺母的型號及其額定載荷。根據其外部載荷條件下的靜安全系數,計算最小規格螺母允許的最大軸向載荷。根據往返加速、等速、減速三階段運動條件,計算平均軸向載荷,分別計算不同組合螺母的額定壽命。
2 堆垛機伺服電機的選型計算
2.1 X 軸伺服電機選型
X 軸伺服電機選型,已知負載質量M;絲杠螺距PB;絲杠直徑DB;絲杠質量MB;摩擦系數μ;負載移動速度v;機械效率η;全程位移時間t;加速行駛時間t1;減速行駛時間t3;聯軸器質量MC;聯軸器直徑DC;α為角加速度;i 為傳動比;TL為步進電機負載轉矩。
2.1.1 計算折算到X 軸伺服電機軸上的負載總慣量
折算到X 軸的負載慣量JW:
X 軸滾珠絲杠的轉動慣量JB:
X 軸聯軸器的轉動慣量JC:
負荷折算的總慣量JL:
2.1.2 X 軸伺服電機轉速的計算
X 軸電機所需的轉速n:
2.1.3 伺服電機驅動負載所需要的扭矩計算
克服摩擦力所需轉矩Tf:
重物加速時所需的轉矩TA1:
螺桿加速時所需要轉矩TA2:
聯軸器加速時所需要轉矩TA3:
加速所需的總轉矩TA:
計算瞬時的最大扭矩:
加速扭矩Ta:
勻速扭矩Tb:
減速扭矩Tc:
實效扭矩Trms:
2.2 初選伺服電機
初選伺服電機,伺服電機額定扭矩T 滿足條件為T>Tf且T>Trms,最大扭矩滿足條件為Tmax>Tf+TA。初步確定伺服電機型號,查出伺服電機慣量JM。
計算折算到伺服電機軸的總負載慣量J:
計算伺服電機啟動轉矩TS:
選定安全系數S,則必需轉矩TM:
小慣量伺服電動機適合快速定位,當負荷與電機慣量比>5 時才考慮使用減速裝置。最終決定X 軸選用小慣量伺服電動機,型號是CTSD-M14-B1012-M000,功率100 W,不帶抱閘功能。
Z 軸選型計算方法和X 軸基本相同,但要考慮垂直安裝時,若突然斷電,由于滾珠絲桿無自鎖功能,絲杠上的載物臺會在重力作用下下滑,故選用帶抱閘功能的小慣量伺服電動機,型號為CTSD-M16-B2012-M110,功率200 W。
3 叉貨氣動裝置氣壓回路的設計
實際倉儲工件質量較輕,堆垛機的出入庫動作由氣缸帶動叉貨裝置完成。叉貨氣動裝置氣壓回路(見圖2)的控制過程是從氣源出來的氣體經氣源三聯件后,通過三位五通電磁換向閥來控制叉貨裝置的運動方向,經過的節流閥控制叉貨裝置的運動速度,通過感應磁性開關對叉貨裝置進行前后限位。
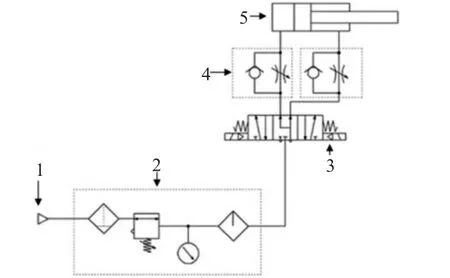
圖2 叉貨裝置的氣動原理
4 立體倉儲控制系統的設計
1)確定采用西門子PLC SIMATIC S7-1200,其設計緊湊、成本低廉。具有脈沖串(PTO)控制接口的驅動,擁有4 路用于帶脈沖接口的伺服驅動,無須位置反饋,可以進行連續的PID 控制,脈沖寬度(PWM)輸出。
2)根據I/O 口分配表(見表1),需要傳感器、開關等輸入口18 個,伺服電機、電磁閥等輸出口11 個,按照20%的余量考慮,確定CPU1214C 具體型號。

表1 PLC 的I/O 口分配
3)自動化倉庫管理系統控制的處理流程,分為主程序控制流程(見圖3)和叉貨裝置動作流程(見圖4)。主程序控制流程是利用傳感器、開關信號對出入庫狀態進行判別,通過控制X 軸、Z 軸伺服電機的使能、脈沖、方向信號,對叉貨裝置的水平和垂直的運動進行控制。叉貨裝置動作流程是根據出入庫要求,對氣壓杠的伸出、縮回動作進行控制,微調Z 軸,保證工件順利完成出入庫動作。根據流程編寫T 形圖,最后對系統進行了仿真和調試。
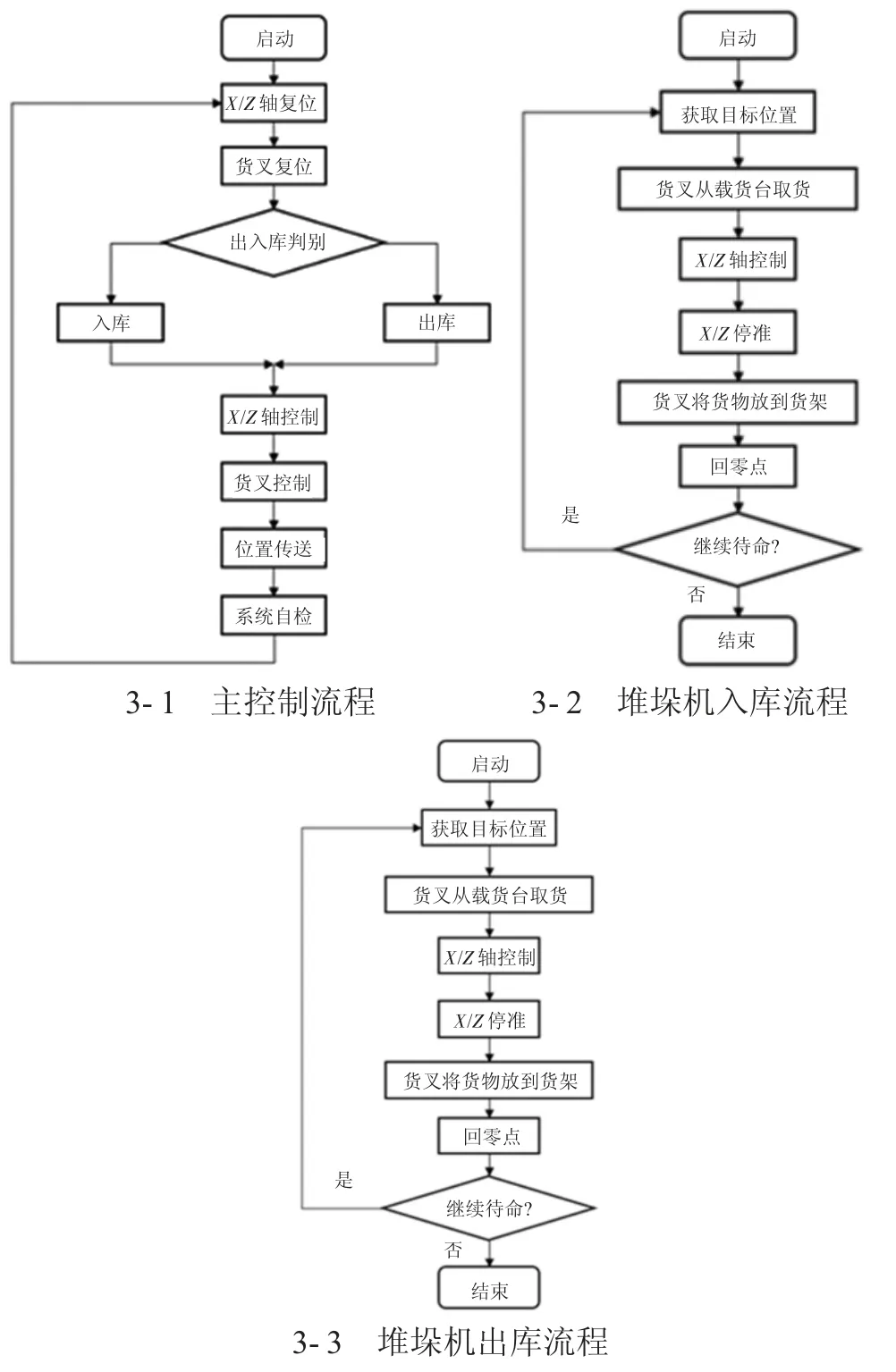
圖3 主程序控制流程
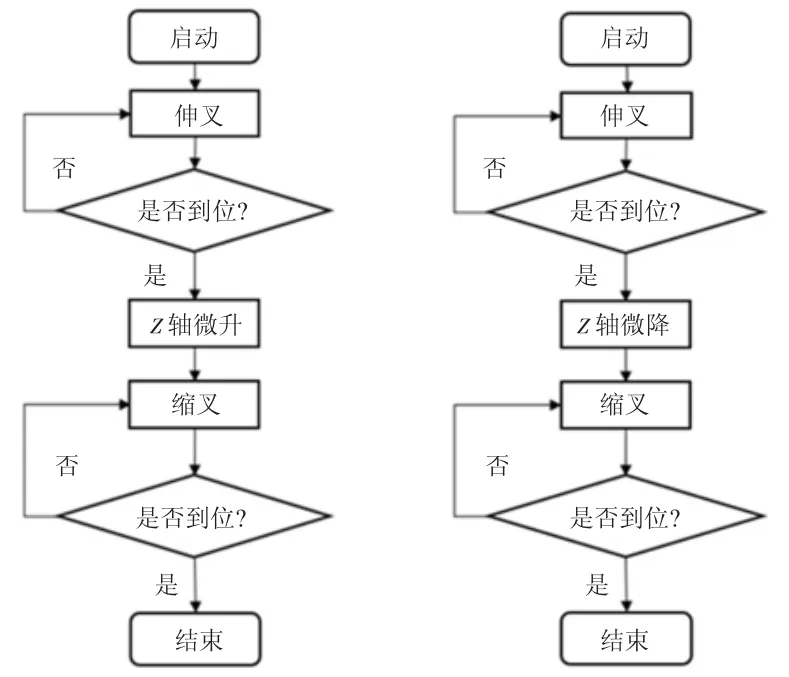
圖4 叉貨裝置入庫、出庫流程
5 結語
自動化立體倉庫是柔性制造系統的重要組成部分,研究和開發自動化立體倉庫,對于推動柔性制造系統的發展和實用化進程具有重要意義[6]。提高出入庫效率和定位精度,利于節省成本,創造經濟效益,推動制造業和服務業融合成長。
