智能網聯汽車協同感知信任度動態計算與評價方法*
2023-08-25 01:01:18姜泓屹韓嘉懿劉彥辰
汽車工程 2023年8期
朱 冰,姜泓屹,趙 健,韓嘉懿,劉彥辰
(吉林大學,汽車仿真與控制國家重點實驗室,長春 130022)
前言
受限于傳感器的感知范圍,傳統的單車感知已難以滿足智能網聯汽車在復雜交通場景的感知需求[1]。通過同一區域內多個智能網聯汽車的傳感器感知信息共享進行協同感知已成為發展趨勢[2]。但是智能網聯汽車的通信網絡具有開放性、動態性和分布式等特點,且可能存在惡意攻擊和不真實信息等干擾[3],因此協同感知過程中車輛間共享信息的真實性與可信度[4]是亟待解決的問題。
現有的智能網聯汽車協同感知方法中,Kim等[5]分別使用傳感器的原始數據、特征數據和檢測結果進行實驗,并驗證了不同感知融合策略下多車協同感知的可行性。Xiao 等[6]通過深度學習方法,從視覺檢測信息中提取關鍵特征信息,并以圖形和語義為對齊坐標,融合多車的共享信息,得到全局環境的感知鳥瞰圖。Arnold 等[7]提出一種基于早期和晚期融合的三維檢測目標協同感知系統,通過深度神經網絡模型將來自不同車輛的激光雷達點云信息融合。Miller 等[8]提出一種結合道路幾何信息的卡爾曼濾波方法,將來自不同車輛傳感器的感知檢測結果融合,實現低精度傳感器的高保真協同感知效果。但現有的協同感知方法默認車輛間協同信息完全真實可靠,而未考慮協同網絡中出現的不真實信息或車輛惡意攻擊對協同方法造成的負面影響[9]。為解決協同感知過程中的信息真實性與有效性問題,可將信任管理模型引入協同感知的融合過程中[10],以構建協同車輛間的信任關系。
現有的車聯網信任管理模型中,樊娜等[11]通過不確定性理論建立車輛節點行為可信度決策機制,采用C-means 算法對車輛行為的符合度進行評估。Rosenstatter 等[12]提出的信任系統通過信任指數(TI)表征車輛對環境、自車和周圍車輛的信任水平,實現車輛對于交通參與者的有效感知,但模型中TI 表征并未體現出道路狀況或檢測等信息的具體認知。Liu等[13]提出一種信任級聯的緊急消息分發模型,將面向車輛的信任度有效地融入到面向數據信息的信任評估中,對攻擊與惡意行為具有較好的魯棒性,但模型會將低于信任值閾值的車輛數據消息全部舍棄。Alnasser 等[14]基于自適應權重過濾的推薦信任模型,并測試不同惡意車輛比例下的模型表現,但模型無法應對高信任車輛的突發惡意行為。
協同感知方法中大多未考慮協同車輛插入或瞞報檢測信息等惡意攻擊行為帶來的負面影響,因此引入信任管理模型解決上述問題。但現有的信任管理模型并未從協同感知過程中數據信息的角度解釋對協同感知過程的可信性,且信任管理模型中信任值的更新過程依賴于協同車輛間的歷史信任值與數據信息,未能滿足協同感知所需的動態性需求及對協同車輛突發惡意行為的實時響應。
本文中根據車輛三維感知網絡的檢測結果建立面向多車協同感知的信任管理評價模型,通過車輛間共享數據的匹配評估、遮擋判別、有效性識別與信任度計算,動態篩選出協同網絡中的異常車輛與惡意攻擊信息,提升協同感知過程中車輛廣播信息的真實性與可信性。
1 智能網聯汽車的檢測信任度計算與評價方法架構
圖1 為文中提出方法的基本架構,包括車輛的三維感知檢測模塊、檢測對象匹配評估與遮擋判別模塊、檢測對象的有效性識別與協同信任度計算模塊3 部分。文中提出的架構運行于各智能網聯汽車中,協同網絡中車輛通過車載通信單元(on board unit,OBU)實現各功能模塊數據信息的廣播與接收。協同網絡中的智能網聯汽車具有兩種相互轉化的身份:主車和交通車,當智能網聯汽車以主車身份運行方法架構時,將自車外的其他智能網聯汽車看作交通車。

圖1 檢測信任度計算與動態評價方法架構
(1)主車vi的三維感知檢測模塊利用車載相機與激光雷達傳感器分別采集主車感知范圍內的二維圖像與深度點云信息,并通過三維檢測模型得到標號從1~N的檢測結果,并將同一檢測時刻下的檢測對象集合Dlocal={,,…}以DvI形式通過OBU廣播給其他交通車,實現檢測結果的信息交互。
(2)主車的檢測對象匹配評估與遮擋判別模塊通過OBU 接收其他交通車廣播的檢測對象集合Dv1,Dv2,…,DvI,獲得全局下的檢測對象信息;同時主車利用坐標系轉換對自車檢測對象與其他交通車檢測對象進行匹配評估,得到檢測對象的可信度;并利用自車激光雷達的深度點云數據計算全局下各檢測對象的可見性值,進一步評價檢測結果的可信度;隨后為識別協同信息中的惡意攻擊信息,引入面向檢測對象的遮擋狀態判別算法,主車利用其他交通車與接收到的所有檢測對象的位姿信息,計算交通車與各檢測對象之間遮擋狀態關系,以判斷某交通車可見或不可見狀態的檢測對象是否出現在其檢測對象集合中。最終主車將上述的計算信息檢測可信度、可見性值和遮擋狀態打包為主車對檢測對象的評價集合Mvi,通過OBU廣播給其他交通車。
(3)主車的檢測對象有效性識別與協同信任度計算模塊通過OBU接收其他交通車的評價集合Mvi,各集合包含各主車對于全局下檢測對象和其他交通車的信任評價信息。借鑒社會學的信任管理模型[15],為得到某車輛對檢測對象的檢測有效性,引入檢測有效性算法,通過聯合多個車輛對同一的遮擋狀態判別結果(),判斷該檢測對象是否為車輛vj所廣播的惡意攻擊信息;利用上述信息并通過可信度方法(C-F方法)計算得到檢測對象的檢測信任度分數,同時根據車輛的檢測集合DvI計算車輛信任度分數CTcar(vj);最終利用動態聚合方法得到協同感知下各檢測對象的全局信任度分數。
文中提出的面向協同感知的信任管理方法,通過車輛OBU 廣播與接收其他交通車的檢測、評估和判別信息來實現對協同感知過程中異常信息的檢測,并通過不確定性推理與聚合方法得到車輛及其檢測對象的信任度分數,實現對異常車輛惡意攻擊信息的動態響應與篩選,同時避免如傳統信任管理模型中對惡意車輛有效信息的不合理舍棄,增強了協同感知車輛對檢測結果的識別能力以及車輛協同感知過程的魯棒性。
2 基于車輛感知檢測的檢測對象匹配評估與遮擋判別
2.1 車輛感知檢測網絡的信息協同
主車利用自車搭載的相機與激光雷達傳感器,于三維檢測模型中輸出車輛自身視角下感知障礙物β的相關狀態信息,包含:檢測對象的類型type(車輛、行人、非機動車駕駛人)、相對于車輛坐標系下的位置信息(xi,yi,zi)、檢測對象的三維邊界框信息(li,hi,wi)、感知檢測網絡的置信度分數Svi()。將上述狀態信息組成檢測對象(n=1,2,3,…,N),并將同一感知時刻下的所有檢測對象信息列入車輛的本地檢測列表Dlocal={,,…}中。
隨后,為實現協同感知的檢測信息交互,主車通過OBU 將同一時刻的檢測對象集合Dlocal和主車GNSS 信息向周圍協同車輛廣播,并同時通過OBU實時接受來自周邊其他智能網聯汽車的協同信息,以獲得道路全局下其他協同車輛發送的帶有GNSS信息的車輛檢測對象集合Dv1,Dv2,…,Dvj。其中,檢測對象集合Dvj={,,…,}(vj代表與vi不同的其他主車,j=1,2,3,…,i,j≠i),而代表為編號vj車的第n個檢測對象的狀態信息。
2.2 相似度匹配評估與信任度賦值
為實現車輛間檢測對象的相似性關聯,主車vi將接收到的檢測集合Dv1,Dv2,…,Dvj與本地檢測列表Dlocal中的檢測對象依次進行相似度匹配評估。首先,主車根據檢測對象的位置信息進行坐標系轉換[16],得到檢測對象在主車笛卡爾坐標系下的位姿信息,再將具有相同時間戳的感知檢測信息進行位姿與尺寸信息的匹配,計算兩個檢測對象與之間包圍盒(bounding box)的三維交并比(Intersection over Union,IoU)數值,如圖2所示。

圖2 IoU計算示意圖
如果兩組檢測信息包圍盒的三維IoU 值超過設定的閾值κ,則認為主車vi的檢測對象與交通車vj的檢測對象具有位姿信息的相似性:
式中閾值κ在二維情況下一般取值為0.5[17-18],擴展到三維檢測場景下取κ=(0.5)2=0.25。檢測可信度Evi()介于[0,1]之間,如果兩組檢測信息包圍盒的三維IoU 值超過設定的閾值κ,則與被認定為同一檢測對象,將交通車vj的感知檢測分數Svj()賦值至主車的Evi()中;其他情況則賦值為0,認定檢測對象間未實現匹配。通過主車與交通車間的檢測相似度評估與信任度賦值表達了交通車的車輛信任度與其數據信息間的直接聯系,體現主車對交通車信任評價的合理性。
2.3 檢測對象的可見性評估
在復雜的交通場景下,部分交通車的檢測對象在主車相機視角中處于遮擋或非可視等狀態,因此會被賦予較低乃至0 值的檢測可信度,所以主車無法通過相似度匹配評估對上述狀態的檢測對象賦予合理的檢測可信度。為解決上述問題,利用主車激光雷達的深度點云信息對檢測對象進一步展開可見性評估。
主車對其他交通車檢測對象的可見性提出以下定義。
(1)P():表示為主車vi的激光雷達點云中,落在檢測對象三維邊界區域中的激光雷達點云數。
依照激光雷達傳感器的工作原理,若從物體反射傳回的激光雷達點數越多,則檢測對象的可見性越高,因此可以避免因主車相機傳感器感知范圍限制而產生的檢測可信度不合理賦值現象。按照PASCAL 標準中對于被遮擋的三維目標的檢測性能等級劃分,將被遮擋比值大于50%的遮擋狀態稱為嚴重遮擋,此時檢測對象的相機檢測可靠性已較低,而檢測對象反射的激光雷達點云數量比值與其被遮擋狀態呈線性關系[19],因此在式(2)中將12local作為點云數比值作為對于檢測對象的可見性判定基準。如果檢測對象的包圍盒區域在主車的激光雷達點云中有超過12local的點云數,則判定可見性為1;如果檢測對象被大范圍遮擋,則其可見性介于[0,1]之間;如果被完全遮擋,致其三維邊界區域中沒有反射回來的激光雷達點,則判定可見性為0,即主車無法確定其他交通車檢測對象的檢測有效性與真實性。
通過對檢測對象可見性值的評價過程,進一步增強了僅依靠評價分數Evi()對檢測對象進行信任度評估的合理性,避免交通車的檢測對象因被嚴重遮擋或超出主車感知范圍而被主車判定為虛假檢測或惡意攻擊。
2.4 車輛與檢測對象間遮擋狀態判別
主車基于視錐體模型[20]和各交通車與檢測對象集合Dv1,Dv2,…,Dvj中各檢測對象間位姿信息的坐標關系,判斷協同區域下各檢測對象在交通車傳感器視場角(field of view,FOV)中的遮擋狀態:可見、截斷、被遮擋(包括傳感器感知范圍外)。
其中視角遮擋關系示意圖如圖3所示。

圖3 視角遮擋關系示意圖
由圖3 可見,在車輛vi的車輛坐標系下:檢測對象vj與v1 為可見狀態;檢測對象v2 為截斷狀態;檢測對象p1和p2為被遮擋狀態。其中,遮擋判別算法的具體流程如圖4所示。

圖4 遮擋判別算法流程圖
協同感知下各車輛三維感知模型的檢測結果,在主車的坐標系下具有固定的位姿與遮擋狀態關系,因而主車得到各交通車FOV 下遮擋狀態為可視的檢測對象,并可知其是否與交通車的檢測集合相符合。為進一步獲得不同主車的評估信息,主車將上述關于其他交通車及其檢測信息的相關評價結果:評價分數、可見性值和遮擋狀態,組成評價集合,通過OBU 再次廣播給協同網絡內的其他交通車,并同時接收其他交通車的評價集合Mvj。
3 檢測對象有效性識別與協同信任度計算
協同網絡中的惡意攻擊車輛通過在正常的廣播信息中插入虛假檢測信息或瞞報檢測信息以干擾正常的協同感知過程。因此須聯合多個評價集合中檢測對象的有效性來對車輛實體的信任度進行評價,并進而從檢測信息中甄別出虛假信息。
3.1 檢測對象有效性識別策略
當交通車vq的檢測對象βvqn相對交通車vj(q=1,2,3,…,j,q≠j)遮擋狀態為可見,但并未出現在交通車vj的檢測集合Dvj中時,則一方交通車的檢測集合中存在虛假信息。因此為正確判別協同車輛是否廣播了虛假信息,引入如表1 所示的檢測有效性識別算法。

表1 檢測有效性識別算法
主車依次對集合V={v1,v2,…,vi}中每輛汽車的檢測對象進行檢測合理性判別:如果車輛vj對檢測對象的遮擋狀態Ovi() ≠0,且該檢測對象并未出現在車輛vj的檢測列表Dvj中,則賦值Ω[i][j,n]為-1,為非正常檢測狀態;其他情況則賦值為1,為正常檢測狀態。在全部遍歷完成后,對同一檢測對象的不同車輛檢測狀態Ω[i][j,n]進行累計,得到累計檢測狀態State[j,n]:若車輛vj的Ω[i][j,n]?State[j,n]≥0,則證明車輛vj的βvjn為有效檢測對象,且檢測有效性因子Eva[i][j,n]=1;其他情況則判別為無效檢測對象,Eva[i][j,n]=0。
主車通過對各車檢測對象的檢測狀態的累計判斷,識別出車輛檢測中有效播報、惡意插入和漏報的檢測對象。當協同感知中存在多個惡意車輛廣播虛假信息的行為,通過檢測對象信息的遮擋判別和有效性識別算法,仍可準確識別出惡意車輛及各虛假信息。
3.2 基于C-F方法的檢測評價分數計算
主車vi對交通車vj檢測集合Dvj={,,…}中的檢測對象依次進行檢測評價分數的計算。通過聯合多車協同信息,將車輛共享的檢測對象評價信息動態聚合[21],通過該方法可實現3 個目標:(1)避免車輛對被遮擋和超視距等處于無法被感知狀態的檢測對象賦予不信任的評價分數;(2)通過智能網聯汽車的協同感知融合,對惡意車輛廣播的虛假檢測賦予較低的評價分數;(3)通過評價有效性篩選車輛的檢測信息,保證協同感知模型在多惡意車輛及信任車輛突發惡意攻擊場景下的功能魯棒性。
文中采用基于不確定性推理的可信度方法(CF 方法)進行信任度的直接推理與計算,該方法基于概率學推理模型,結合已知的先驗條件,從不確定性初始證據出發,評估結論的可信程度。在C-F 方法中,通過知識、證據與結論表達所解決的問題,利用產生式規則來計算結論的不確定性,實現對不確定性問題的概率表達。
其中,關于知識的產生式規則表現形式為:IFETHENH(CF(H,E))。E為問題的先驗條件,H為問題的結論,CF(H,E)為該先驗條件下結論的可信程度,CF(H,E) ∈[0,1],其取值越大則越支持問題為真。在本文研究中,將C-F 方法進一步引申。針對主車視角下檢測對象信任度的計算問題,從不確定的初始證據出發,推理得到結論及其可信度值,計算公式為
式中CF(Hvi,Evi)賦值為主車對檢測對象的檢測可信度Evi(),作為信任度計算問題的先驗條件。
最終,主車對檢測對象的信任度問題計算公式為
協同網絡中對檢測對象可見的交通車均可針對信任度問題得到一個確定性概率結論CF(Hvi),從不同檢測角度支撐檢測對象的信任度計算結果。為進一步降低結論中不確定性的負面影響,進行動態聚合計算,得到協同網絡下各車輛vi∈V對檢測對象的檢測評價分數:
檢測評價分數是聯合各協同車輛對車輛vj檢測對象的集體信任評價結果,通過協同感知中協同車輛間檢測對象統一的信息關系,實現了信任模型中對于檢測對象的共同信任評估。
3.3 協同下車輛信任度計算
3.4 檢測的全局協同信任評價分數計算
此階段,主車已經完成對其他協同車輛檢測對象的信任度評價,并得到對應的協同信任評價分數和車輛信任度。在主車的檢測和匹配模型中,匯總了不同視角的車輛檢測評價分數。依據檢測對象的檢測可信度、檢測可見性和不同車輛視角的車輛信任評價分數,聚合得到全局評價下檢測對象的全局協同信任(cooperative trust)評價分數Sglobal():
通過協同車輛間信任評估的動態聚合方法提升了車輛對可視、截斷和遮擋等狀態的檢測信任度,保證了協同感知的感知可靠性。
4 仿真實驗
為測試驗證并進一步說明本文提出的智能網聯汽車檢測信任度計算與動態評價方法,設計了含有多元素交通參與者的雙向會車場景,通過Prescan 與Simulink 軟件聯合仿真,完成了對模型方法有效性的驗證。文中仿真車輛與真實車輛運行相同的檢測網絡和信任度評價模型,且利用Prescan 仿真軟件中的V2X 插件,可實現仿真車輛OBU 間的廣播信息傳輸過程,實現對實車驗證場景的整體復現。
4.1 智能網聯汽車3D檢測網絡
采用現有的3D 檢測網絡[22],感知檢測算法通過對多模態特征的融合,能夠在交通場景中準確識別檢測多種交通參與者。首先在Ubuntu16.04 系統中配置檢測網絡所需的系統環境,利用KITTI 數據集驗證算法的檢測識別精度,3 種類別檢測對象的檢測精度與召回率曲線結果如圖5所示。
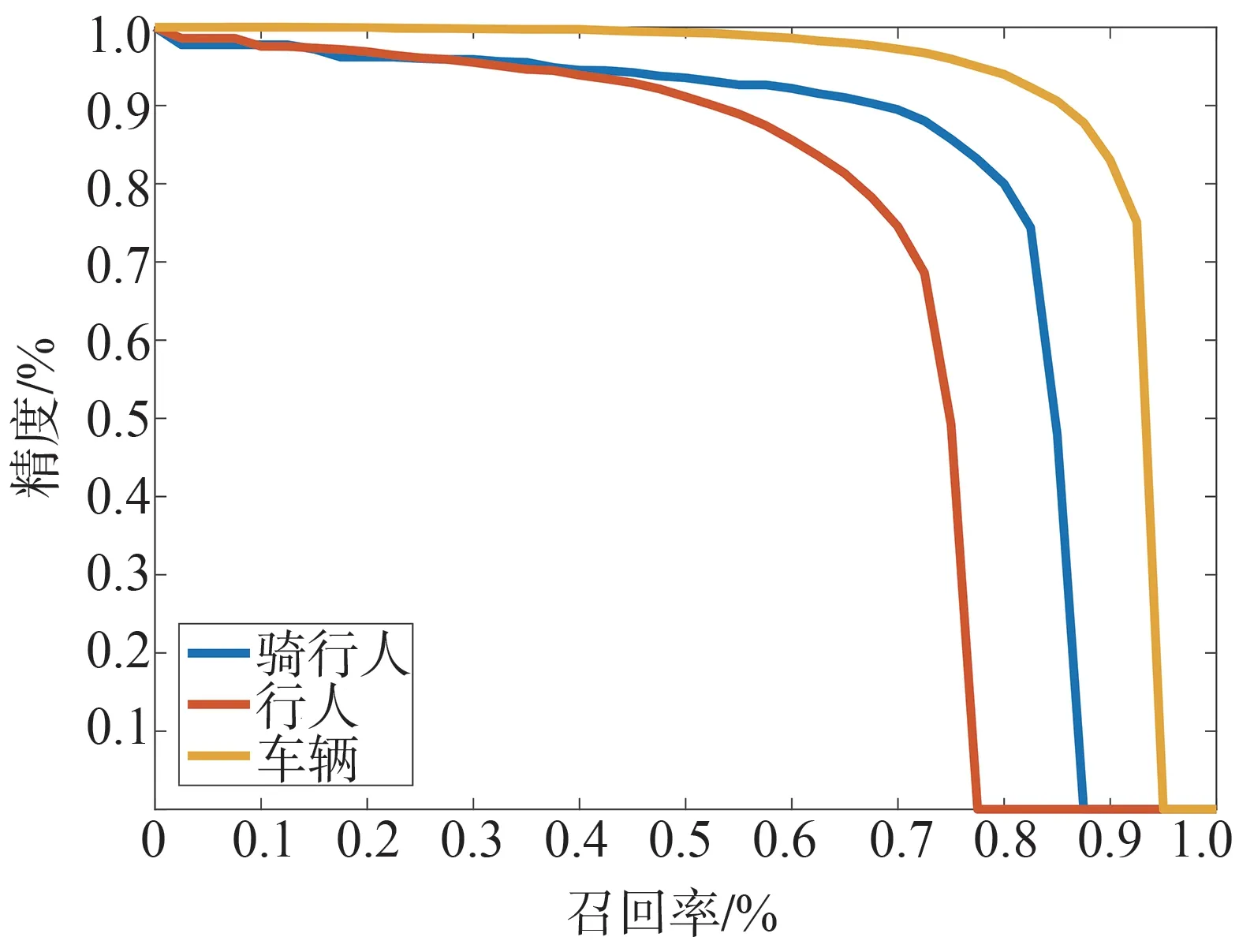
圖5 精度-召回率曲線
隨后在Prescan 仿真軟件中搭建場景并采集符合KITTI格式的交通場景數據集,按照1∶1的比例將數據集分為訓練集與驗證集。經過模型訓練與測試,各類3D 檢測目標的檢測識別精度均能達到仿真驗證要求。
4.2 仿真場景搭建
在仿真軟件中搭建雙向四車道的會車場景,如圖6 所示。場景中,車輛依次標記為v1,貨車標記為t,貨車前方車輛標記為v2,對向車輛標記為v3和v4;其中在車輛v2 的前方插入一個惡意檢測,標記為m1;在車輛v3 的前方插入一個惡意檢測,標記為m2;路邊的自行車行人標記為p。

圖6 仿真場景俯視圖
仿真運行時間設置為10 s,車輛以10 m/s 的速度行駛。車輛v2 從仿真開始第3~7 s 時在其檢測集合中插入異常檢測m1,車輛v3 從第5 s 在其檢測集合中插入異常檢測m2至仿真結束,異常檢測m1和m2通過兩車的OBU 廣播給全局車輛進行惡意干擾。
如圖7 所示,仿真中存在車輛感知檢測對象被截斷、被遮擋下的超視距感知、多車異常廣播等復雜交通場景。通過設置車輛v2 與v3 在不同仿真時段插入異常檢測以驗證遮擋判別模型和有效性識別算法的性能。因此,該仿真場景及流程可驗證文中所提模型方法的可行性和有效性。

圖7 仿真場景下車輛v1、v2、v3和v4的相機視角
4.3 仿真結果分析
為驗證本文提出的協同信任度評價方法,從車輛信任度變化曲線、截斷狀態檢測對象的識別和被遮擋檢測對象的識別3 個角度對模型方法的有效性進行說明。
從車輛v1 獲得的其他車輛廣播消息,可計算得到v1 視角下場景中所有車輛的車輛信任度CTcar(vj)變化趨勢,如圖8所示。可以明顯看到,v2與v3兩車因在檢測隊列中插入異常檢測而致使其在全局下的車輛信任度降低,其中車輛v2從第7 s開始恢復正常廣播,得益于動態聚合方法的高時間靈敏度響應特性,v2 的車輛信任度迅速恢復至正常廣播狀態下的信任度值。因此,本文方法在面對高信任度車輛的惡意攻擊能夠快速響應,準確甄別協同感知中的異常車輛,并在其恢復正常廣播狀態后,回調該車輛在協同網絡中的車輛信任度。

圖8 協同感知下各車輛全局信任值
圖9展示了通過本文方法提升車輛v1對其自車感知視角下截斷狀態的檢測對象v2 的感知評價分數。因被檢測對象v2 在車輛視角v1 下的部分圖像特征被貨車t遮擋,車輛v1 的檢測網絡中對v2 的檢測評價分數會處于較低狀態,而其他交通車在仿真初始時刻距離較遠,因而檢測網絡中的評價分數較低。相較于傳統信任管理模型中舍棄惡意車輛節點所有廣播信息的加權平均方法[23],本文中提出的動態聚合方法顯著提升了車輛v1 對于被遮擋檢測v2的感知評價分數,且面對車輛v3 的惡意攻擊行為,并未對檢測曲線產生顯著的波動影響,增強了協同感知車輛對檢測結果的識別能力以及車輛協同感知過程的魯棒性。

圖9 協同感知下對截斷檢測的信任度
為進一步說明本文方法在面對異常車輛的惡意攻擊行為時的魯棒性,對比傳統信任管理方法繪制車輛v1 視角下被遮擋檢測p的評價分數變化曲線。在車輛v1 視角下,檢測對象p全仿真過程處于被遮擋狀態,無法獲得其檢測信息。車輛v2、v3 和v4 分別從雙向車道由遠及近接近檢測對象p,對檢測的感知信任度隨距離接近而上升,如圖10中虛線所示。

圖10 車輛v1視角下被遮擋檢測p的Sglobal(p)變化
而車輛v2 與v3 被檢測出插入惡意攻擊,按照傳統的信任管理模型方法,車輛在檢測到異常車輛的惡意攻擊信息后,選擇直接舍棄異常車輛的全部廣播信息。如圖10 所示,在第3 s 之后,車輛v2 插入惡意攻擊,其后第5 s 之后車輛v3 插入惡意攻擊,傳統方法下車輛v1 對被遮擋檢測對象p的信任度只能依賴于全程保持正常廣播狀態的受信車輛v4 的檢測評價分數。而本文提出的方法通過有效性識別篩選異常車輛中的可信任信息,判別車輛v2 與v3 在檢測對象p的廣播信息中是否插入惡意攻擊,以獲得協同車輛在可信狀態下的檢測評價分數,獲得優于傳統信任管理方法的感知性能。
5 結論
針對智能網聯汽車協同感知過程中面臨的檢測信息真實性與協同車輛可信度問題,結合車輛協同網絡中共享的檢測結果信息,提出了一種基于遮擋狀態判別與檢測有效性識別策略的智能網聯汽車信任度動態評價方法。首先利用協同車輛間廣播的檢測結果進行匹配評估與遮擋狀態判別,獲得車輛與檢測對象間的遮擋狀態評價信息;隨后引入檢測對象的有效性識別與基于C-F 方法的聚合評價策略,提出了面向協同車輛及其檢測結果的信任度管理評價模型;最后,通過在協同感知仿真場景中引入傳統信任管理方法與本文提出方法進行實驗對比,驗證了本文方法可以準確識別協同感知模型中的異常車輛與惡意攻擊行為,提升了協同感知車輛對檢測結果的識別信任度,實現了信任管理模型面對高信任車輛突發惡意攻擊的實時動態響應,增強了智能網聯汽車協同感知過程的魯棒性。
猜你喜歡
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
石油瀝青(2021年4期)2021-10-14 08:50:44
中華手工(2017年2期)2017-06-06 23:00:31
海峽科技與產業(2016年3期)2016-05-17 04:32:12
中國教育技術裝備(2015年19期)2015-03-01 02:43:07
中外會展(2014年4期)2014-11-27 07:46:46
俄羅斯問題研究(2012年1期)2012-03-25 09:54:51
體育師友(2012年4期)2012-03-20 15:30:10
