基于平方根容積卡爾曼濾波的路面附著系數估計*
2023-08-14 10:35:12杜若飛王健李楠費明哲鄧歡王云靖
汽車工程師 2023年8期
杜若飛 王健 李楠 費明哲 鄧歡 王云靖
(1.山東交通學院,濟南 250357;2.寧波市鄞州德來特技術有限公司,寧波 315100)
1 前言
汽車主動安全系統起到預防車輛發生事故、保護車內乘員免受傷害的作用[1]。路面附著系數是主動安全系統的一個關鍵參數[2],直接反映輪胎與路面間的附著情況,因此,準確估計路面附著系數對提升汽車行駛安全性具有重要意義。
路面附著系數的估計方法包括基于結果的(Effect-based)方法和基于原因的(Cause-based)方法[3]。基于結果的方法通過分析由路面變化引起的車輛動力學響應來計算路面附著系數,優勢在于不需要額外的傳感器,可有效降低成本[4]。基于原因的方法通過測量對路面附著系數影響較大的因素,并依靠經驗模型估計路面附著系數,雖然該方法實時性較好,但需要加裝額外的傳感器,且傳感器成本較高,限制了其商業使用[5],且該方法依賴大量精確的試驗數據,對于未知的路面很難精確估計[6]。基于結果的方法主要分為2 種,即基于輪胎響應的方法[7-8]和基于車輛動力學響應的方法[9-12]。前者能夠保證檢測的實時性,但受外界影響較大;后者可以直接利用車輛自身傳感器,成本較低,但易受模型準確度的影響。武鐘財[13]利用擴展卡爾曼濾波(Extended Kalman Filter,EKF)算法對車輛狀態參數和路面附著系數進行估計,取得了較好的估計效果。王少帥[14]等利用無跡卡爾曼濾波(Unscented Kalman Filter,UKF)算法實現了路面附著系數的有效估計。李剛[15]等利用容積卡爾曼濾波(Cubature Kalman Filter,CKF)算法對車輛狀態參數和路面附著系數進行估計,并利用駕駛模擬器在環試驗對算法進行驗證。EKF 算法通過泰勒展開將非線性系統進行局部線性化后轉變為線性系統,從而實現良好的估計效果,但會產生較大的截斷誤差;UKF 算法通過無跡變換產生Sigma 點逼近狀態分布,避免了EKF 算法的高階截斷誤差;CKF 算法估計精度較EKF 和UKF 算法高,其通過三階球面-徑向容積準則選擇容積(Cubature)點,但無法保證協方差矩陣的正定性及觀測器的穩定性。
綜上,本文針對容積卡爾曼濾波算法在路面附著系數估計中的缺陷,提出平方根容積卡爾曼濾波(Square root Cubature Kalman Filter,SCKF)算法,該方法借助正交三角分解避免CKF 中由協方差矩陣開方造成的矩陣非負定及觀測器不穩定問題,可提高估計精度和魯棒性。基于上述特性,本文在MATLAB/Simulink 中建立三自由度車輛動力學模型與Dugoff 輪胎模型,在CarSim 中建立車輛運行環境,通過SCKF算法估計路面附著系數,利用CarSim/Simulink聯合仿真驗證算法的有效性。
2 車輛與輪胎建模
2.1 整車模型
車輛動力學模型表示車輛運動過程中各參數之間的函數關系,是設計估計算法的基礎,考慮到估計算法的實時性和車輛縱向、側向及橫擺3 個方向的運動,本文采用三自由度車輛動力學模型,如圖1所示,并進行如下假設:車輛坐標系的原點與車輛的質心重合;忽略車輛行駛過程中受到的空氣阻力與滾動阻力;4 個輪胎力學特性一致;忽略懸架的作用,車身與底盤剛性連接;忽略車輛的側傾與橫擺運動。
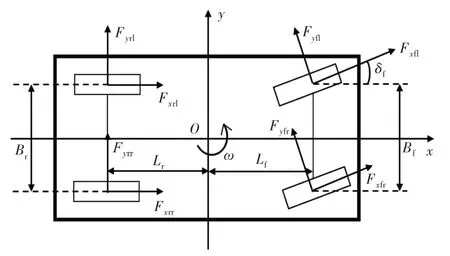
圖1 三自由度車輛動力學模型
車輛的縱向運動方程為:
式中,m為整車質量;ax為車輛縱向加速度;δ為前輪轉角;Fxfl、Fxfr、Fxrl、Fxrr分別為左前輪、右前輪、左后輪、右后輪的縱向力;Fyfl、Fyfr分別為左前輪、右前輪的側向力。
車輛的側向運動方程為:
式中,ay為車輛側向加速度;Fyrl、Fyrr分別為左后輪、右后輪的側向力。
車輛繞z軸運動時,有:
式中,J為車輛繞z軸的轉動慣量;ω為橫擺角速度;Mz為回正力矩:
式中,Lf、Lr分別為質心與前軸、后軸的距離;Bf、Br分別為前、后輪距。
2.2 輪胎模型
目前應用較多的輪胎模型有魔術公式(Magic Formula,MF)輪胎模型和Dugoff 輪胎模型,與魔術公式輪胎模型相比,Dugoff 輪胎模型具有參數少和計算量小的優點,考慮到算法的實時性要求,本文采用Dugoff輪胎模型[16-17]計算輪胎受力情況,輪胎受力分析如圖2所示。
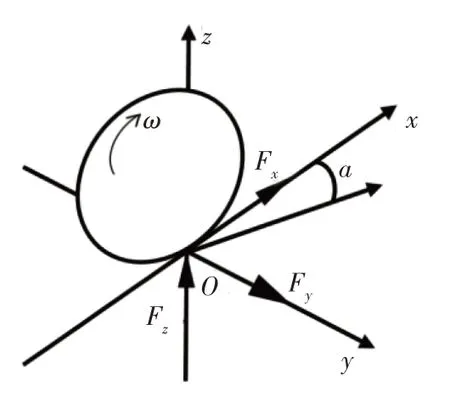
圖2 Dugoff輪胎模型
輪胎的縱向力與側向力表達式分別為:
其中:
式中,i=f,r 分別表示前、后輪;j=l,r 分別表示左、右輪;μij為各車輪的路面附著系數;Cxij、Cyij分別為各車輪輪胎縱向剛度、側偏剛度;sij為各車輪輪胎滑移率;αij為各車輪輪胎側偏角;ε為速度影響因子;vx為車輛縱向速度;Fzij為各車輪輪胎的垂向載荷;分別為各車輪歸一化后的輪胎力,忽略了路面附著系數的影響,有利于算法編程;f(L)為模型修正系數;L為輪胎滑移特性參數。
滑移率的計算公式為:
式中,vij為各車輪的縱向速度;ωij為各車輪的角速度;R為車輪有效滾動半徑。
車輪中心速度的計算公式為:
式中,vcfl、vcfr、vcrl、vcrr分別為左前輪、右前輪、左后輪、右后輪中心處的速度;ωfl、ωfr、ωrl、ωrr分別為左前輪、右前輪、左后輪、右后輪的角速度;vy為車輛側向速度。
輪胎側偏角的計算公式為:
車輪垂向載荷的計算公式為:
式中,La=Lf+Lr為軸距;hg為質心高度。
3 基于平方根容積卡爾曼濾波的路面附著系數估計算法
3.1 平方根容積卡爾曼濾波算法
根據車輛動力學方程式(1)~式(4)確定系統的參數變量為x=[μfl,μfr,μrl,μrr]T,定義系統的觀測量為y=[ax,ay,ω]T、系統的輸入量為u=[δ,F0xij,F0yij]T,具體估計過程為:
a.對于一般的非線性系統,其狀態空間方程可以寫成:
式中,f(x(t),u(t))、h(x(t),u(t))分別為估計系統的狀態方程和量測方程;w(t)為過程噪聲;v(t)為量測噪聲。
估計器的狀態方程和觀測方程可以表示為:
b.采用奇異值分解(Singular Value Decomposition,SVD)方法對狀態量誤差協方差矩陣進行分解:
式中,Gk-1|k-1為狀態誤差協方差矩陣;Pk-1|k-1為(k-1)時刻狀態量誤差協方差矩陣;svd()為矩陣分解函數。
c.計算容積點:
式中,;xk-1為(k-1)時刻狀態量的預測值;n為狀態量的維度為容積點權重矩陣;B=[In×n-In×n]。
d. 計算經過狀態方程迭代后的容積點及預測的狀態量:
其中:
式中,xk|k-1為k時刻的狀態預測值。
e. 計算狀態量預測值的誤差協方差矩陣的平方根:
f.計算更新容積點:
g.將容積點代入量測方程進行傳播:
式中,yk|k-1為k時刻觀測量估計值。
h. 計算觀測量預測值的誤差協方差矩陣的平方根:
i.計算互協方差矩陣:
k. 更新狀態量得到路面附著系數最優估計值:
l.更新誤差協方差矩陣的平方根因子:
3.2 路面附著系數估計模型
為驗證本文提出算法的有效性,利用CarSim 與Simulink 聯合仿真平臺進行驗證。首先,在CarSim中搭建整車運行仿真工況,設定輸入、輸出參數;然后,在Simulink 中搭建三自由度車輛動力學模型、Dugoff 輪胎模型和算法模塊;最后,進行CarSim 與Simulink 聯合仿真,通過設置不同的路面仿真工況,對SCKF 和CKF 算法在路面附著系數估計方面的準確性和魯棒性進行對比分析,模型整體框圖如圖3所示。
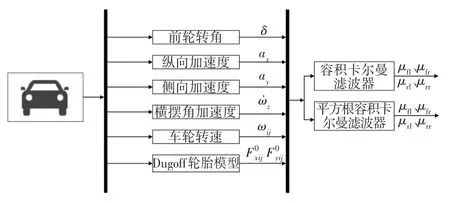
圖3 路面附著系數估計框架
4 仿真驗證
為驗證SCKF 觀測器的有效性和魯棒性,設計了制動工況下的低附著系數路面、高附著系數路面及對接路面工況進行對比驗證,并對CKF 算法和SCKF 算法進行對比分析,仿真模型選用CarSim 中自帶的車輛模型,相關參數如表1所示。
4.1 低附著系數路面仿真驗證
在CarSim中設置車輛初始速度為80 km/h、節氣門開度為0、擋位為空擋、輪缸壓力為0.45 MPa,路面附著系數設置為μ=0.4,仿真時間為10 s,仿真結果如圖4所示。對比仿真曲線可知,CKF算法和SCKF算法均有向標準值收斂的趨勢,相較于CKF算法,SCKF算法收斂精度更高。這是由于SCKF算法利用正交三角分解法保證了協方差矩陣的正定性,而CKF算法利用平方根分解導致了協方差矩陣負定。在車輛前輪路面附著系數估計中,CKF的估計誤差在10%以內,SCKF的估計誤差在3%以內;在車輛后輪路面附著系數估計中,2種算法的估計誤差稍大,但SCKF算法的估計誤差仍低于CKF算法的估計誤差。
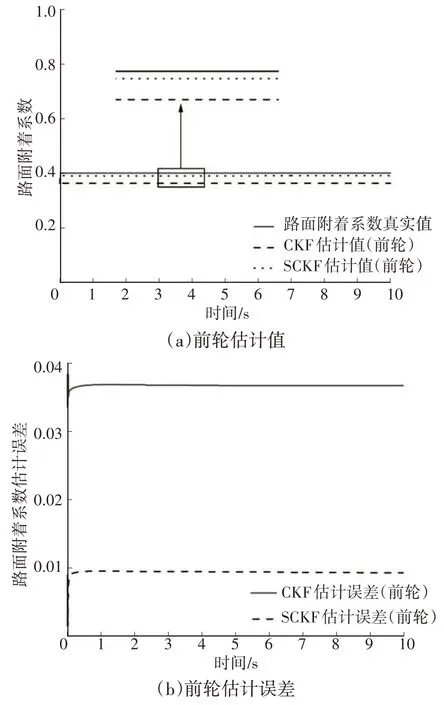
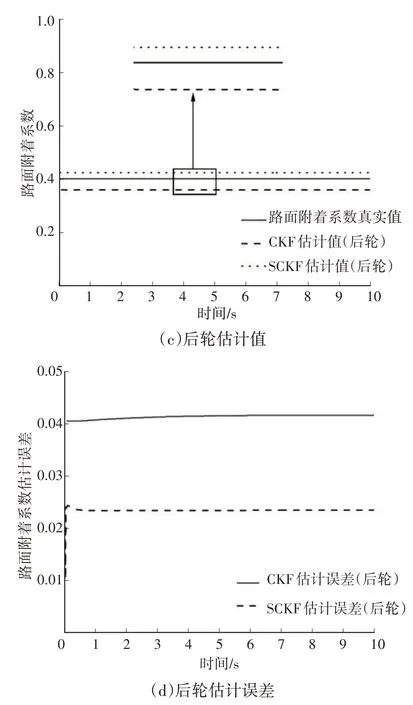
圖4 低附路面下附著系數估計結果對比
4.2 高附著系數路面仿真驗證
保持CarSim 中其他參數不變,只改變路面附著系數,設置路面附著系數μ=0.85,繼續進行仿真驗證。驗證結果如圖5 所示,與低附著系數路面情況大致相同,CKF算法的最大估計誤差為12.8%,SCKF算法的最大估計誤差為3.62%。
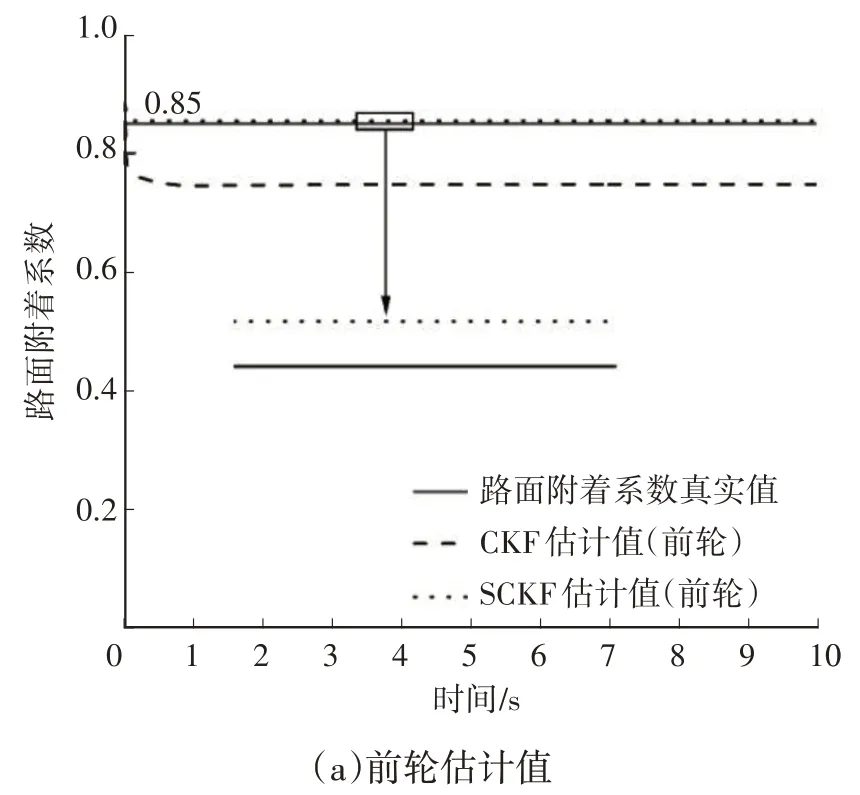
圖5 高附路面下附著系數估計結果對比
4.3 對接路面仿真驗證
設計對接路面工況,在CarSim 中設置路面附著系數在100 m 處(約第4.9 s)從0.85 突變到0.20,其他參數保持不變,仿真結果如圖6 所示。在路面附著系數發生突變時,SCKF 算法可以快速響應路面附著系數的變化,誤差曲線抖動較小,最大誤差僅為0.041 9,而CKF 算法不能快速響應路面的變化,最大誤差為0.728 6,這是由于在路面附著系數發生突變時,SCKF 算法利用正交三角分解法保證了協方差矩陣的正定性,而CKF 算法使用的平方根分解法計算量較大且容易造成協方差矩陣負定,導致估計結果與真實值偏差較大。
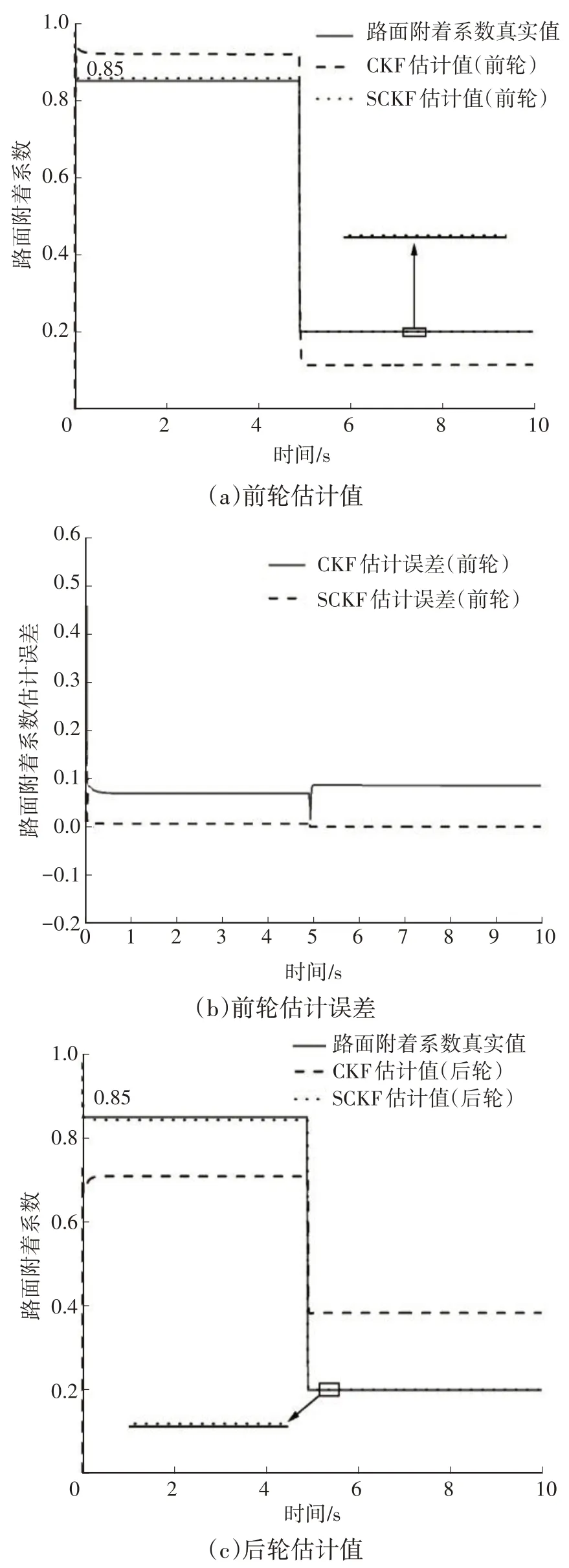
圖6 對接路面下附著系數估計結果對比
5 結束語
本文在傳統的容積卡爾曼濾波算法基礎上針對協方差矩陣不對稱或非負定導致的濾波發散及觀測值不穩定的問題進行改進,提出了平方根容積卡爾曼濾波算法。利用CarSim 與Simulink 進行聯合仿真,驗證了改進算法的有效性。得到以下結論:
a.以三自由度車輛動力學模型為基礎,可通過平方根容積卡爾曼濾波算法估計路面附著系數;
b. 采用正交三角分解法可以克服傳統容積卡爾曼濾波算法中協方差矩陣不對稱或非負定導致的濾波發散及觀測值不穩定的問題;
c.平方根容積卡爾曼濾波算法魯棒性強,可在多種路面附著條件下進行路面附著系數估算。
本文僅在不同路面附著系數條件下開展了仿真驗證,未開展驅動、轉向等工況下的仿真驗證,未來將繼續使用平方根容積卡爾曼濾波算法在驅動、轉向以及制動等聯合工況下開展關于路面附著系數估計的研究,為車輛主動安全系統的設計提供參考。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
測控技術(2018年12期)2018-11-25 09:37:34
北京航空航天大學學報(2017年9期)2017-12-18 07:12:25
光學精密工程(2016年6期)2016-11-07 09:07:19
電源技術(2016年9期)2016-02-27 09:05:39
核科學與工程(2015年4期)2015-09-26 11:59:03
電源技術(2015年1期)2015-08-22 11:16:28
電測與儀表(2015年24期)2015-04-09 12:04:36