基于BDS 載波與偽碼一致性的欺騙檢測算法
2023-08-12 06:37:16白鉦皓袁思思
導航與控制 2023年3期
周 興, 陳 帥, 白鉦皓, 袁思思, 張 琨
(南京理工大學自動化學院, 南京 210094)
0 引言
隨著2020 年北斗三號衛(wèi)星導航系統(tǒng)的全面建成, 北斗衛(wèi)星導航系統(tǒng)(Beidou Navigation Satellite System, BDS) 在我國國防、交通、電力、金融、農(nóng)業(yè)等領(lǐng)域日益發(fā)揮著重要作用[1]。 然而, 由于BDS 信號傳播到地面時信號功率水平較低和北斗系統(tǒng)開放服務(wù)的特性, 導致接收終端易受到欺騙信號干擾, 進而導致相關(guān)設(shè)備得到錯誤的位置、速度和時間信息, 使得相關(guān)設(shè)備無法正常使用[2-3]。同時, 如文獻[4]和文獻[5]所述, 欺騙干擾在嚴重情況下會對國家的國防和經(jīng)濟安全造成嚴重影響,如何有效地防御欺騙干擾已經(jīng)成為一個亟待解決的問題。
按照欺騙實現(xiàn)的復雜程度, 欺騙干擾可分為簡單欺騙、中級欺騙和高級欺騙三類: 簡單欺騙使用衛(wèi)星信號模擬器即可實現(xiàn), 欺騙信號不需要與真實衛(wèi)星信號同步; 中級欺騙則需要欺騙信號和真實信號同步, 目的是在不引起接收終端產(chǎn)生較大波動的情況下實現(xiàn)欺騙目的; 高級欺騙需要多個欺騙設(shè)備協(xié)調(diào)以模擬真實的衛(wèi)星分布環(huán)境,這種欺騙方式實現(xiàn)的難度較高, 目前基本還停留在理論研究層次[6]。 同時, 抗欺騙干擾的方法按照防御的層級也可以分為三類, 依次為信號處理級(Signal Processing Level, SPL)、數(shù)據(jù)位級(Data Bit Level, DBL) 和導航 與位置解算 級(Navigation and Position Solution Level, NPSL): SPL 利用信號功率、信號來向、信號到達時間等信息來判別欺騙信號與真實信號; DBL 和NPSL 則多利用接收機的各種量測信息進行檢測, 量測信息包括衛(wèi)星偽距、接收機鐘差和鐘漂、解算的位置速度等[7]。
由于中級欺騙干擾不易被接收終端發(fā)現(xiàn)且具備較好的隱蔽性, 對使用BDS 系統(tǒng)定位和定時的設(shè)備具有較大的威脅, 所以本文主要對中級欺騙干擾對接收機造成的影響進行研究。 中級欺騙攻擊的初始時刻, 為了保持欺騙信號與真實信號一致, 欺騙設(shè)備利用外部的雷達等探測設(shè)備得到接收機的位置、速度等信息, 之后逐步調(diào)整欺騙信號的載波、偽碼等使欺騙信號與真實信號同步。在同步的過程中, 由于欺騙設(shè)備是利用內(nèi)部的控制器分別調(diào)節(jié)載波和偽碼的, 故此時會出現(xiàn)載波和偽碼不一致的現(xiàn)象。 同時, 在欺騙信號開始誘導欺騙對象得到錯誤的位置和速度時, 也會分別調(diào)整載波和偽碼等, 此時也會出現(xiàn)載波和偽碼不一致的現(xiàn)象[6]。 依據(jù)載波和偽碼在欺騙場景下的不一致現(xiàn)象, 本文提出了基于BDS 載波與偽碼一致性的欺騙信號檢測算法。 國內(nèi)外已有使用偽碼和載波信息進行欺騙干擾檢測的先例, 如文獻[8]和文獻[9]利用在真實和欺騙環(huán)境下不同衛(wèi)星間的載波Doppler 頻率和變化率具有不同的特性進行了欺騙檢測; 文獻[6]與本文一樣都是利用載波和偽碼的一致性進行欺騙檢測, 不同點在于文獻[6]主要在捕獲階段進行欺騙檢測, 然而中級欺騙通常是出現(xiàn)在環(huán)路已經(jīng)穩(wěn)定跟蹤的時候, 文獻[6]所述的方法使用場景較為有限, 本文所述的方法則主要在跟蹤階段進行欺騙檢測, 故具有更多的應用場景。
1 BDS 載波與偽碼頻率一致性分析
由文獻[10]可知, BDS 信號從衛(wèi)星上發(fā)射時其內(nèi)部的頻點是固定的, 但由于衛(wèi)星和接收機存在視線方向上的相對運動, 使得接收機接收到的信號頻率與衛(wèi)星信號發(fā)送的頻率不一致, 即存在Doppler 效應。 Doppler 頻移計算如下
式(1)中,fd為Doppler 頻率,vr和vs分別為接收機和衛(wèi)星的速度,λ為信號波長,I為接收機與衛(wèi)星視線方向上的單位矢量,f為信號的頻率,c為光速。 信號中的偽碼是調(diào)制在載波之上的, 所以Doppler 效應同時存在于載波和偽碼當中。 根據(jù)式(1), 可以推導出載波Doppler 頻率與偽碼Doppler 頻率的關(guān)系
載波和偽碼的信號頻率通常是固定的, 由式(3)可知二者的Doppler 頻率比值應當也是固定的。以BDS 的B1I 頻點為例,fcarrier為1561.098MHz,fcode為2.046MHz, 則根據(jù)式(3) 可得的比值為763。
圖1 和圖2 分別為北斗衛(wèi)星2 號星和北斗衛(wèi)星28 號星在靜態(tài)無欺騙干擾場景下從接收機環(huán)路中得到的載波Doppler 頻率和偽碼Doppler 頻率。 本文以接收機的載波環(huán)和碼環(huán)控制器輸出給載波NCO(Numerically Controlled Oscillator) 和偽碼NCO的相對標稱頻率的調(diào)整數(shù)值作為載波Doppler 頻率和偽碼Doppler 頻率。
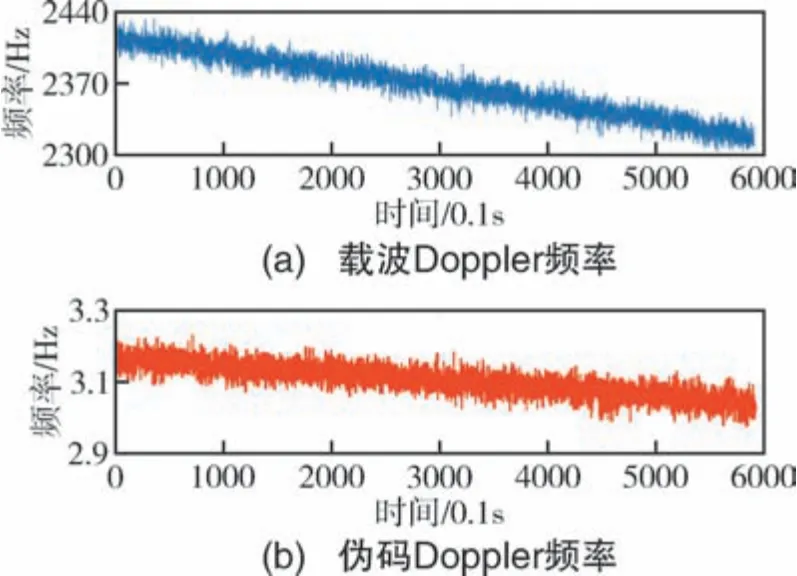
圖2 北斗衛(wèi)星28 號星的載波和偽碼Doppler 頻率Fig.2 Carrier and pseudocode Doppler frequencies ofBeidou satellite-28
由圖1 和圖2 可知, 由于量測誤差、系統(tǒng)噪聲和電離層的影響, 得到的存在一定的噪聲[11]。 為了減小噪聲的影響, 本文使用α-β濾波器對的數(shù)據(jù)分別進行濾波以減小噪聲和誤差對檢測算法的影響。α-β濾波器是一種可用于狀態(tài)估計、數(shù)據(jù)平滑的一維濾波器, 由于載波Doppler 和偽碼Doppler 是分別進行濾波的, 同一時刻濾波器只對某顆衛(wèi)星的1 種數(shù)據(jù)進行濾波,不依賴系統(tǒng)的具體模型且穩(wěn)定性較好, 實現(xiàn)簡單不會占用大量計算資源, 便于工程實現(xiàn)[12]。 所以,本文選擇該濾波器進行濾波, 濾波方程如下
式(6)中,E為經(jīng)過轉(zhuǎn)換后的的差值, 763 由式(3)計算得到。
中級欺騙會使接收機得到錯誤的位置、速度等信息, 同時在攻擊的時候會導致載波和偽碼頻率不一致。 接收機通常利用衛(wèi)星位置和偽距實現(xiàn)定位, 使用衛(wèi)星速度與載波Doppler 頻率實現(xiàn)定速, 偽距計算公式如下
式(7)中, Δt為信號的傳播時間。
為了達到欺騙接收機位置的目的, 欺騙系統(tǒng)通常需要適當?shù)馗淖兏鱾€衛(wèi)星的偽距, 偽距的改變可以根據(jù)文獻[12]與改變碼相位使接收機得到錯誤的信號發(fā)射時間來實現(xiàn), 此時會導致載波和偽碼的不一致。 同理, 速度欺騙可以通過改變載波Doppler 頻率來實現(xiàn), 原理與偽距類似, 在此不再贅述。 信號傳播時間Δt的計算公式如下
式(8)中,tu為接收機接收到信號的時間,ts為信號的發(fā)射時間(可由式(9)計算得到),δtu和δts分別為接收機和衛(wèi)星的鐘差,I'和T分別為電離層和對流層的延時,ε為量測誤差。 式(9) 中,TOW為導航電文下一子幀的起始時間,w為當前子幀接收到的整個導航電文數(shù)據(jù)碼的字數(shù),b為當前導航電文已接收的比特數(shù),c'為接收到的整周C/A 碼(C/A 碼的周期為1ms),CP為當前這一周C/A 碼中的碼相位量測值。
圖3 為含欺騙信號的北斗衛(wèi)星20 號星、21 號星和26 號星根據(jù)式(6)計算得到的E與E的方差σ2(E), 欺騙信號是在橫軸數(shù)值為1190s 處加入。由圖3 可知, 在欺騙信號出現(xiàn)時E和σ2(E)都會發(fā)生變化, 但σ2(E)比E變化更為明顯, 所以本文以σ2(E)的數(shù)據(jù)進行欺騙檢測。
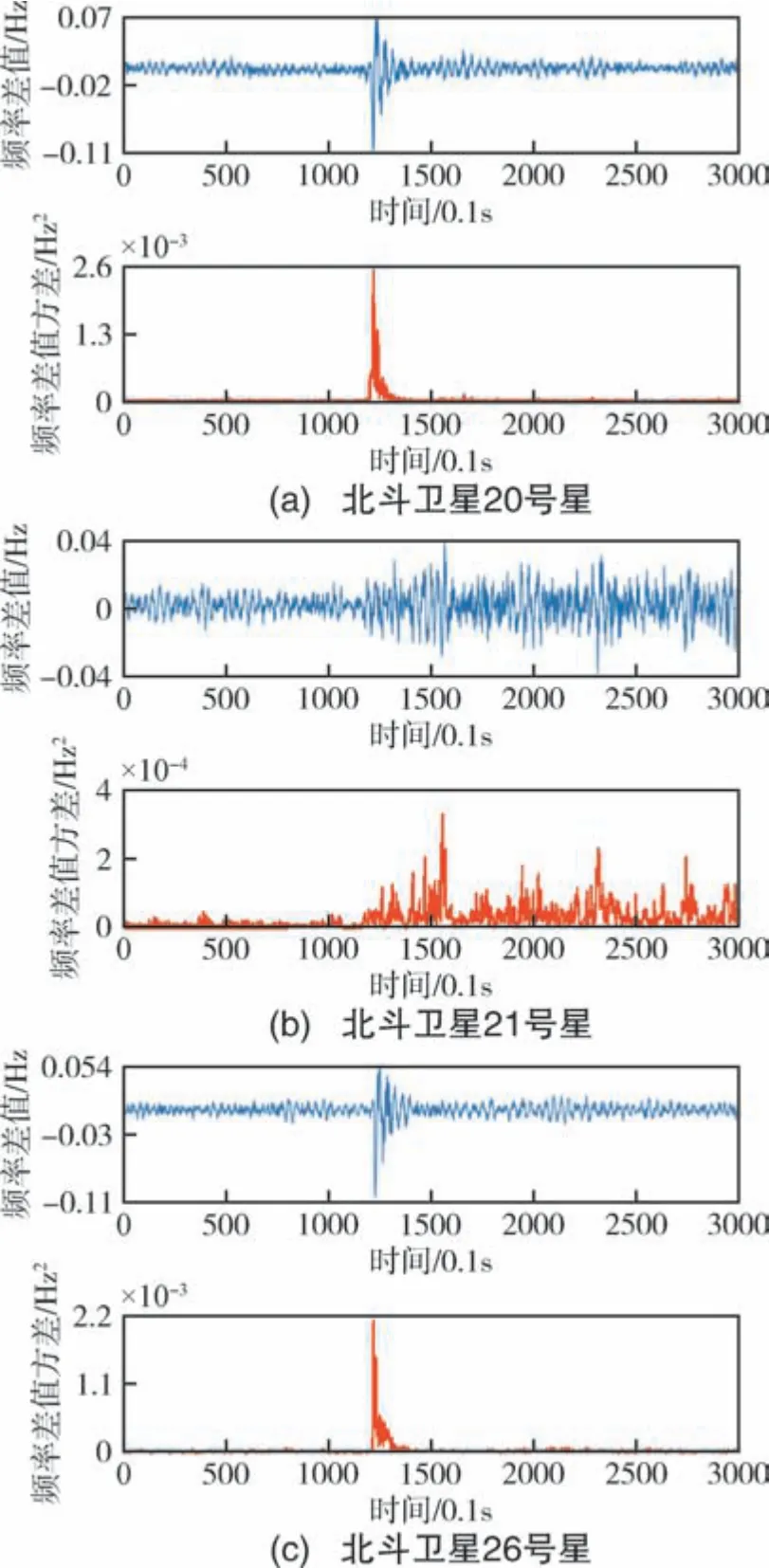
圖3 頻率差值與頻率差值方差對比圖Fig.3 Comparison between frequency difference and variance of frequency difference
2 檢測方法
唐檢測器是接收機信號捕獲和跟蹤時使用的一種信號檢測器, 因檢測速度快、耗費資源少和檢測精度高而被廣泛使用。 它先給上/下行計數(shù)器一個初值B, 若信號值超過門限則計數(shù)器加1, 反之則減1, 當計數(shù)器值超過上行門限A時判定信號存在, 若計數(shù)器值小于下行門限則判定信號不存在。 本文以唐檢測器為欺騙信號的檢測判定系統(tǒng),當計數(shù)器值超過上行門限時判定欺騙信號存在,否則認為信號正常。 由文獻[13]可知, 檢測概率隨B和A的增大而增大, 但檢測時間也會隨之增加,所以二者是一個調(diào)諧的過程。 本文根據(jù)文獻[13]中仿真得到的結(jié)果將B設(shè)為2,A設(shè)為12。 唐檢測流程如圖4 所示,V可視為σ2(E),σ2(E)采用滑動窗口的方法進行計算,B為計數(shù)器值。
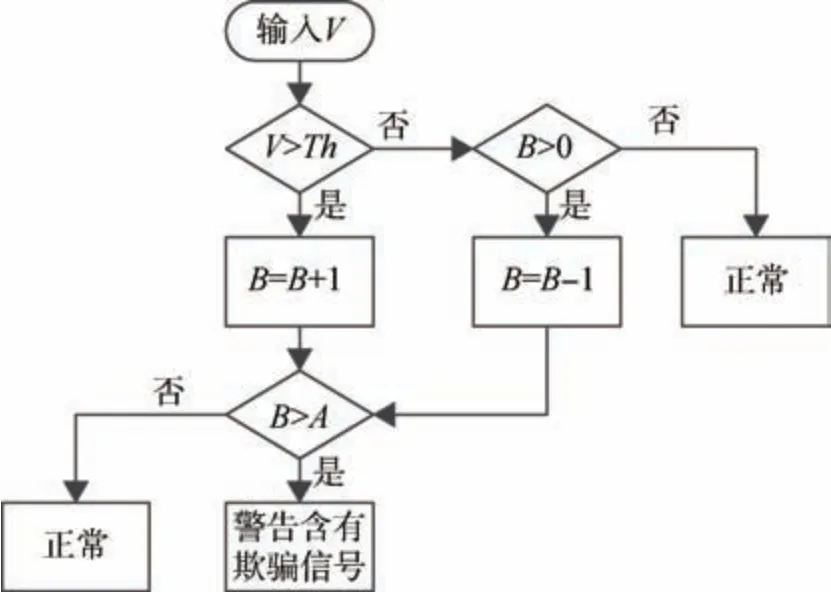
圖4 唐檢測流程圖Fig.4 Flowchart of Tong detection
虛警概率是指在沒有欺騙信號的情況下判定欺騙信號存在的概率, 由文獻[14]可知虛警概率可視為關(guān)于檢測門限的函數(shù), 可以利用設(shè)定的虛警概率計算得到檢測門限。 設(shè)檢測門限為Th, 則虛警概率計算公式為
式(10) 中,Pfa為虛警概率,p(σ2(E)) 為關(guān)于σ2(E)的概率密度函數(shù)。 由于欺騙信號具有時變性,使得在欺騙信號存在時σ2(E) 的分布較為復雜,p(σ2(E))較難以推導, 所以本文使用統(tǒng)計論中的檢測率來代替P, 以代替Pfa,的計算公式為
通過以上分析, 利用欺騙信號會導致載波和偽碼頻率不一致的特性使用唐檢測器對σ2(E)進行欺騙檢測, 將可能含有欺騙信號的通道標識出來。欺騙檢測的具體流程為:
1)采集數(shù)據(jù)。 從環(huán)路中采集載波和偽碼的Doppler 頻移, 本文每0.1s 采集一次。
3)通過式(6)計算E。
4)滑動窗口, 計算σ2(E)。
5)唐檢測器檢測, 將含有欺騙信號的通道標識出來, 并對外示警。
3 實驗驗證
實驗驗證采用如圖5 和圖6 所示的含有欺騙信號的BDS 信號進行測試, 圖5 中的紅色和藍色軌跡分別為欺騙信號和真實信號的三維軌跡, 圖6 中的紅色和藍色軌跡分別為欺騙信號和真實信號的線速度。
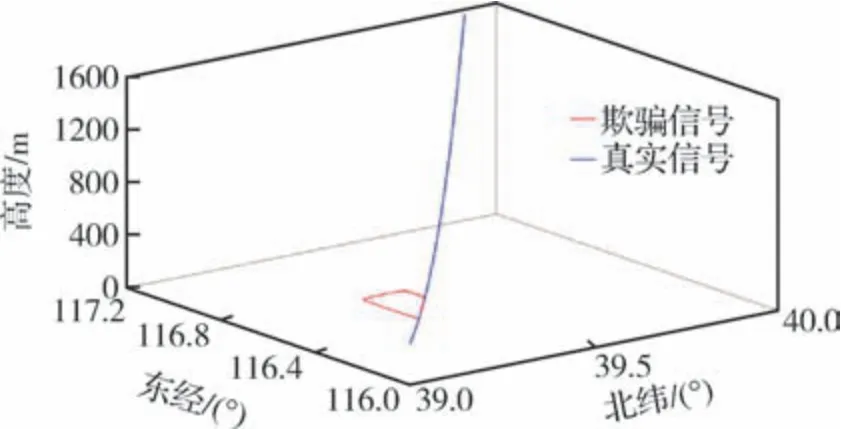
圖5 真實信號與欺騙信號的三維位置圖Fig.5 3D location map of real signal and deception signal
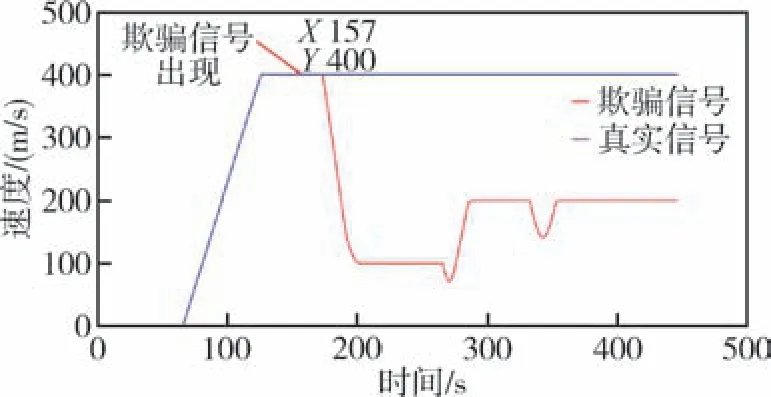
圖6 真實信號與欺騙信號的線速度圖Fig.6 Linear velocity diagram of real signal and deception signal
實驗架構(gòu)如圖7 所示。 首先, 使用衛(wèi)星信號模擬器生成一條位置和速度如圖5 和圖6 中藍色軌跡所示的真實信號, 之后啟動衛(wèi)星信號模擬器, 將衛(wèi)星信號模擬器生成的實時軌跡信息和衛(wèi)星信號發(fā)送給欺騙設(shè)備作為欺騙設(shè)備的量測信息; 然后,欺騙設(shè)備根據(jù)接收到的量測信息和設(shè)定的欺騙策略調(diào)整自身參數(shù); 最后, 將生成的欺騙信號與真實信號經(jīng)過合路器合路之后發(fā)送給接收機。 欺騙信號在圖5 和圖6 的第157s 開始出現(xiàn), 對應的周內(nèi)秒為86605s。

圖7 欺騙設(shè)備連接示意圖Fig.7 Connection diagram of deception device
為了便于分析實驗結(jié)果, 實驗采用半實物仿真的方式進行, 使用上位機保存從接收機中得到的載波與偽碼Doppler 頻率, 之后使用第2 節(jié)中的檢測方法對數(shù)據(jù)進行檢測。 驗證選取信號中的3 號星、20 號星、21 號星和26 號星的數(shù)據(jù)進行驗證。圖8 為測試不同虛警概率下檢測到欺騙信號的時間, 圖例中的“欺騙” 表示欺騙信號出現(xiàn)的時間,當檢測到欺騙的時間小于欺騙出現(xiàn)的時間時認為系統(tǒng)誤把真實信號檢測為欺騙信號。 綜合圖8 可知, 在虛警概率大于0.02425% 時會存在誤檢現(xiàn)象, 當虛警概率小于0.0066%時會出現(xiàn)無法檢測出欺騙信號的現(xiàn)象, 所以綜合考慮之后將虛警概率設(shè)定為0.015%。 根據(jù)設(shè)定的虛警概率, 計算得到4 顆衛(wèi)星的Th值依次為: 1.84 ×10-4、3.45 ×10-5、2.80 ×10-5和3.29 ×10-5, 計算Th值時使用的樣本總數(shù)依次為: 876、885、880 和901。
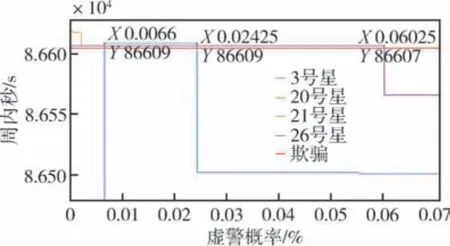
圖8 不同虛警概率下檢測到欺騙信號的時間Fig.8 Diagram of time when deception signals are detected under different false alarm probabilities
北斗衛(wèi)星3 號星、20 號星、21 號星和26 號星的欺騙信號檢測結(jié)果如圖9 所示。 檢測結(jié)果為當唐檢測器檢測判定為無欺騙信號時設(shè)定為0, 反之則設(shè)定為1, 并一直保持此結(jié)果。
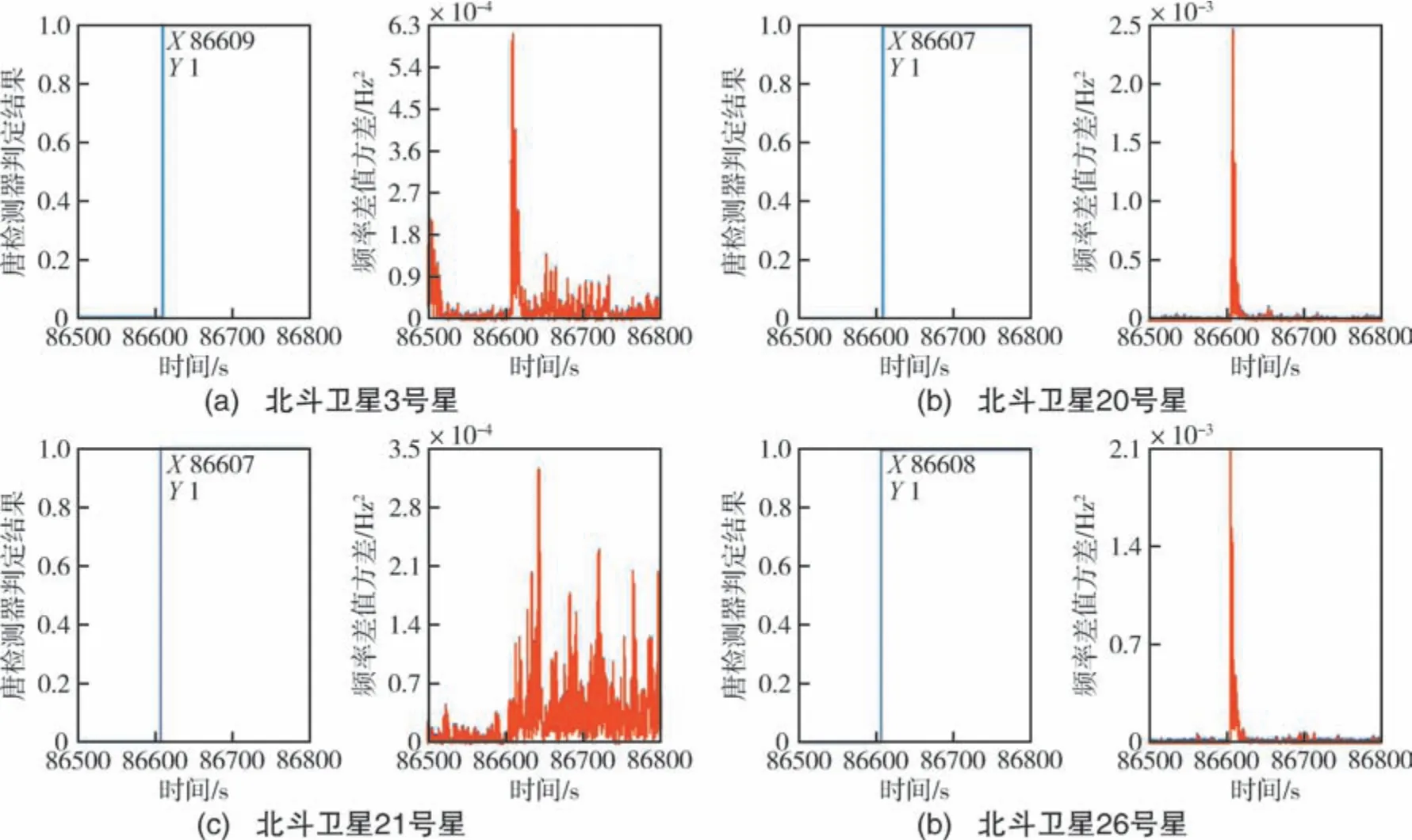
圖9 欺騙信號的檢測結(jié)果Fig.9 Detection results of deception signals
由圖9 可知, 在欺騙信號于86605s 時刻出現(xiàn)之后, 北斗衛(wèi)星3 號星、20 號星、21 號星和26 號星檢測到欺騙信號的時刻依次為86609s、86607s、86607s 和86608s, 通過實驗驗證了本文所提算法可以在欺騙信號出現(xiàn)之后的5s 內(nèi)檢測到欺騙信號的存在, 可以及時向外界示警。
4 結(jié)論
利用中級欺騙信號會引起接收機的載波和偽碼產(chǎn)生波動導致二者之間不再保持一致性的特點,本文提出了一種能反映二者之間不一致性的中級欺騙干擾檢測算法。 通過唐檢測器判斷二者差值的方差是否在一段時間內(nèi)連續(xù)超出門限值來判斷是否受到了中級欺騙的攻擊, 結(jié)合BDS 衛(wèi)星信號模擬器與欺騙設(shè)備生成一組中級欺騙信號來對本文的算法進行驗證。 通過實驗驗證得到: 本文的算法可以在欺騙信號出現(xiàn)后的5s 內(nèi)檢測出欺騙攻擊并及時向外部系統(tǒng)示警, 以免欺騙信號對系統(tǒng)產(chǎn)生較大的影響。
猜你喜歡
中學生數(shù)理化·七年級數(shù)學人教版(2021年6期)2021-11-22 07:50:58
中學生數(shù)理化·七年級數(shù)學人教版(2021年6期)2021-11-22 07:50:58
中學生數(shù)理化·七年級數(shù)學人教版(2021年6期)2021-11-22 07:50:58
鴨綠江(2021年35期)2021-04-19 12:24:18
中學生數(shù)理化·七年級數(shù)學人教版(2020年12期)2021-01-18 06:57:46
中學生數(shù)理化·七年級數(shù)學人教版(2020年12期)2021-01-18 06:57:46
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
中國生殖健康(2019年3期)2019-02-01 06:12:26
海峽科技與產(chǎn)業(yè)(2016年3期)2016-05-17 04:32:12
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25